+ About Us +
++
+ Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum. + Viverra habitasse quis cras sem etiam aptent ad. Orci nam praesent proin faucibus faucibus libero augue euismod. Nascetur fusce vestibulum tempus natoque nulla suscipit ultrices porta iaculis. Aauctor tristique enim vitae sem accumsan. Etiam ipsum risus ligula dictum nunc consequat senectus aenean. Tempus natoque aenean, tempor fermentum suspendisse dui varius nam. +
++ +
+
+ You Can find me here +
++ Meet SeaHawk II +
++
+ Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum. + Lorem ipsum odor amet, consectetuer adipiscing elit. Maecenas sollicitudin dapibus; vestibulum et blandit pellentesque augue volutpat. Magna sodales ornare nascetur fermentum arcu diam. Lacus consequat mollis condimentum parturient magnis rutrum imperdiet egestas. Ad nisi vestibulum at cubilia bibendum eu consectetur. Pellentesque venenatis parturient suscipit vel iaculis etiam. Alorem pulvinar porta est natoque augue dictum. Proin rutrum tristique dictum ultricies lectus tellus phasellus. Facilisis lectus quisque tristique ut duis ultrices himenaeos dictum. Magnis ex porta porta, nullam tempus laoreet. +
++
 +
+ + Gallery +
++ {% include project-gallery-card.html %} +
+ {{page.description}} +
++
+ Robots +
++ {% include robot-card.html %} +
+ +
++ +
+{{ alum.name }}
+{{ alum.current }}
++ +
{{ member.name }}
+{{ member.roles }}
++ +
{{ mentor.name }}
+{{ mentor.roles }}
++ +
+ + {% include footer.html %} + + + + + + \ No newline at end of file diff --git a/_layouts/compress.html b/_layouts/compress.html new file mode 100644 index 0000000..fae2293 --- /dev/null +++ b/_layouts/compress.html @@ -0,0 +1,10 @@ +--- +# Jekyll layout that compresses HTML +# v3.1.0 +# http://jch.penibelst.de/ +# © 2014–2015 Anatol Broder +# MIT License +--- + +{% capture _LINE_FEED %} +{% endcapture %}{% if site.compress_html.ignore.envs contains jekyll.environment or site.compress_html.ignore.envs == "all" %}{{ content }}{% else %}{% capture _content %}{{ content }}{% endcapture %}{% assign _profile = site.compress_html.profile %}{% if site.compress_html.endings == "all" %}{% assign _endings = "html head body li dt dd optgroup option colgroup caption thead tbody tfoot tr td th" | split: " " %}{% else %}{% assign _endings = site.compress_html.endings %}{% endif %}{% for _element in _endings %}{% capture _end %}{% endcapture %}{% assign _content = _content | remove: _end %}{% endfor %}{% if _profile and _endings %}{% assign _profile_endings = _content | size | plus: 1 %}{% endif %}{% for _element in site.compress_html.startings %}{% capture _start %}<{{ _element }}>{% endcapture %}{% assign _content = _content | remove: _start %}{% endfor %}{% if _profile and site.compress_html.startings %}{% assign _profile_startings = _content | size | plus: 1 %}{% endif %}{% if site.compress_html.comments == "all" %}{% assign _comments = "" | split: " " %}{% else %}{% assign _comments = site.compress_html.comments %}{% endif %}{% if _comments.size == 2 %}{% capture _comment_befores %}.{{ _content }}{% endcapture %}{% assign _comment_befores = _comment_befores | split: _comments.first %}{% for _comment_before in _comment_befores %}{% if forloop.first %}{% continue %}{% endif %}{% capture _comment_outside %}{% if _carry %}{{ _comments.first }}{% endif %}{{ _comment_before }}{% endcapture %}{% capture _comment %}{% unless _carry %}{{ _comments.first }}{% endunless %}{{ _comment_outside | split: _comments.last | first }}{% if _comment_outside contains _comments.last %}{{ _comments.last }}{% assign _carry = false %}{% else %}{% assign _carry = true %}{% endif %}{% endcapture %}{% assign _content = _content | remove_first: _comment %}{% endfor %}{% if _profile %}{% assign _profile_comments = _content | size | plus: 1 %}{% endif %}{% endif %}{% assign _pre_befores = _content | split: "
| Step | Bytes |
| raw | {{ content | size }}{% if _profile_endings %} |
| endings | {{ _profile_endings }}{% endif %}{% if _profile_startings %} |
| startings | {{ _profile_startings }}{% endif %}{% if _profile_comments %} |
| comments | {{ _profile_comments }}{% endif %}{% if _profile_collapse %} |
| collapse | {{ _profile_collapse }}{% endif %}{% if _profile_clippings %} |
| clippings | {{ _profile_clippings }}{% endif %} |
+ {{page.title}} +
++
{{page.title}}
+ ++
{{page.description | strip | strip_html | strip_newlines }}
+ {% endunless %} +Published on + {{ page.date | date: "%-B %d, %Y" }} by {{site.author-name}} + +
+ {%- assign tags = page.tags -%} + {%- unless tags.size == 0 -%} ++ + {% assign i = 0 %} + {% for tags in page.tags %} + {{page.tags[i]}} + {% assign i = i | plus:1 %} + {% endfor %} +
+ {%- endunless -%} + {% assign words = content | number_of_words %} + {%- unless content.size == 0 -%} ++ {{ words | divided_by:180 }} min + READ
+ {%- endunless -%} +{{ content }}
+Projects
++ Cabrillo Robotics Club (CRC) is a dedicated team of students from Cabrillo College in Aptos, California united by a mutual passion for robotics. We design and engineer cutting-edge solutions, drawing from the diverse experience and knowledge of our interdisciplinary members. The team is structured into four specialized subteams: Electrical, Mechanical, Software, and Marketing. This decentralized approach fosters autonomy within each division, allowing members to focus on their areas of expertise, while working collaboratively to create innovative and reliable robotic systems. +
++ Members +
+ {% include team-member-card.html %} ++ Mentors +
+ {% include team-mentor-card.html %} ++ Alumni +
+ {% include team-alumni-card.html %} +diff --git a/_site/blog/cabrillo-robotics-wins-international-robotics-competition.html b/_site/blog/cabrillo-robotics-wins-international-robotics-competition.html new file mode 100644 index 0000000..0c529ea --- /dev/null +++ b/_site/blog/cabrillo-robotics-wins-international-robotics-competition.html @@ -0,0 +1 @@ +
Cabrillo Robotics Wins International Robotics Competition

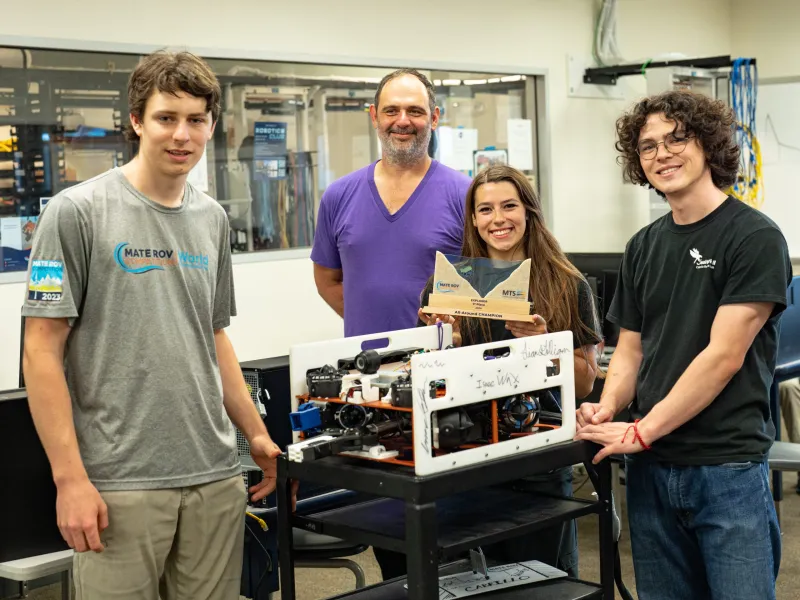
The Cabrillo Robotics Club achieved an impressive victory, taking home First Place in the most advanced category of the Marine Advanced Technology Education (MATE) World Championship. Held in Kingsport, TN from June 20-22 2024, the competition gathered 82 teams from 17 countries to showcase advancements in underwater robotics.
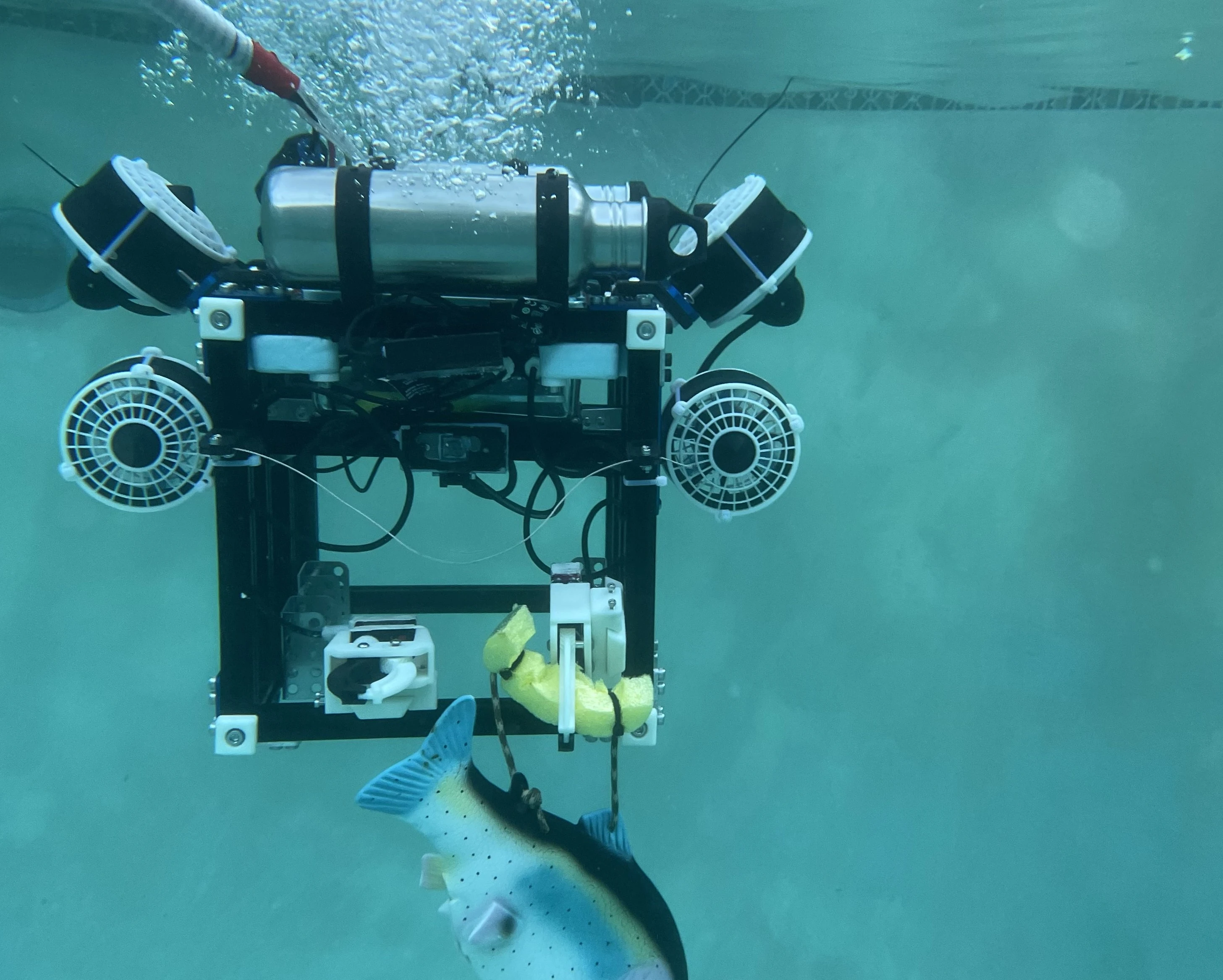
The MATE competition challenges teams worldwide to build Remotely Operated Vehicles (ROVs). These tethered, submersible robots perform observation, inspection, and physical tasks in various aquatic environments. Competing teams must build an ROV capable of executing simulated industry applications in a product demonstration. They also showcase their robot’s functionality and design rationale through marketing, technical documentation, and an engineering presentation.
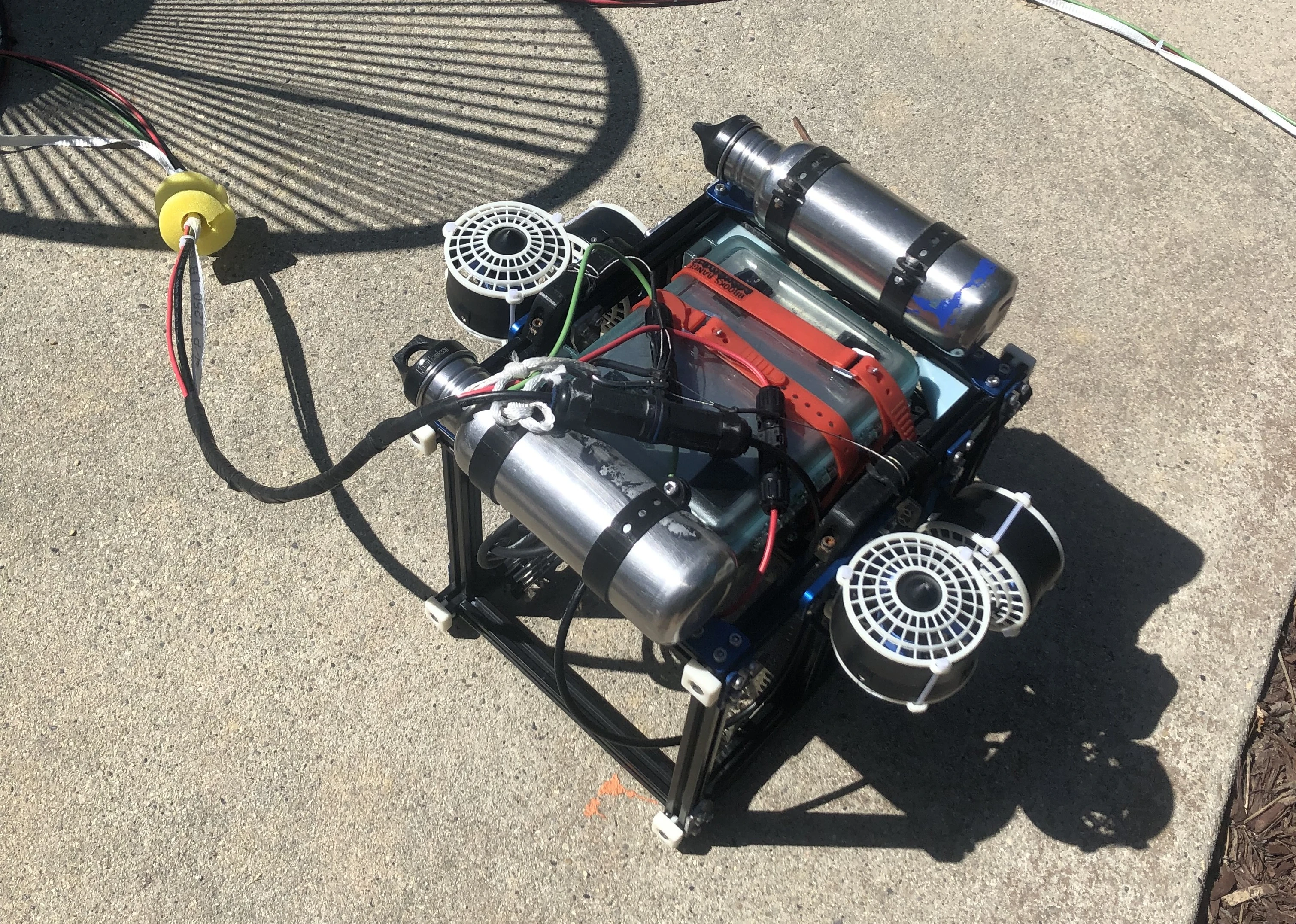
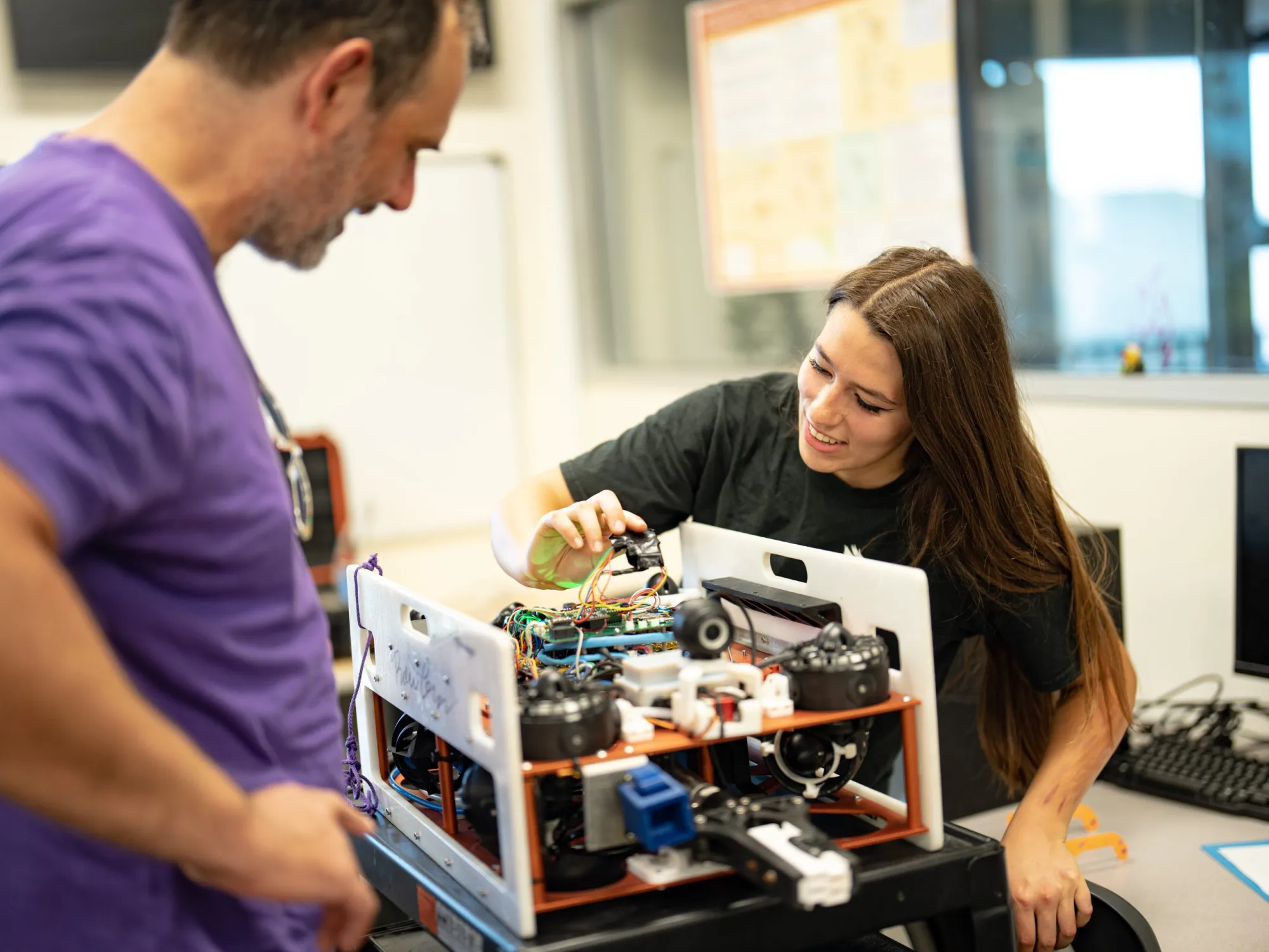
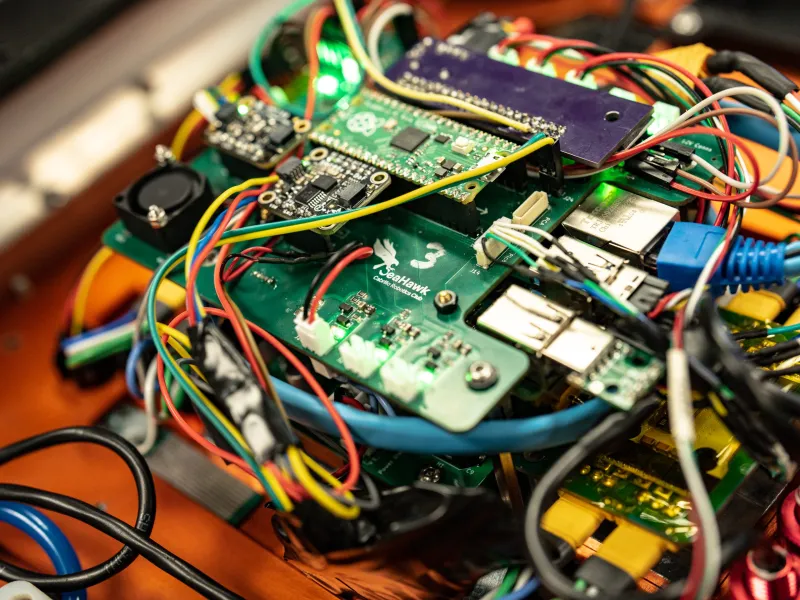
Cabrillo Robotics has competed in the MATE Pioneer Division and achieved first place at the World Championship the last two consecutive years. This year, the club built a completely redesigned ROV to tackle the challenges in the most advanced class of the competition–Explorer. The small team dedicated nearly a year to constructing an originally designed ROV, the SeaHawk II. Members developed fully custom software and hardware solutions resulting in a reliable vehicle capable of rapidly completing competition mission tasks. SeaHawk II stands as a testament to the mechanical, electrical, and software engineering skills of the team, with members from each specialty collaborating seamlessly to produce a professional-grade final product. Isaac Wax, Hardware Lead, commented “We believe in doing things the right way, not the easy way. Rather than settle for good enough, low-risk solutions, we executed innovative, high-risk designs across mechanical, electrical and software systems using cross-integration techniques yielding a streamlined, high-performance ROV. I believe that our team’s perseverance sticking to these values paid off to make Seahawk II a World Champion.” Cabrillo Robotics plans on making all components of the robot open source on GitHub.
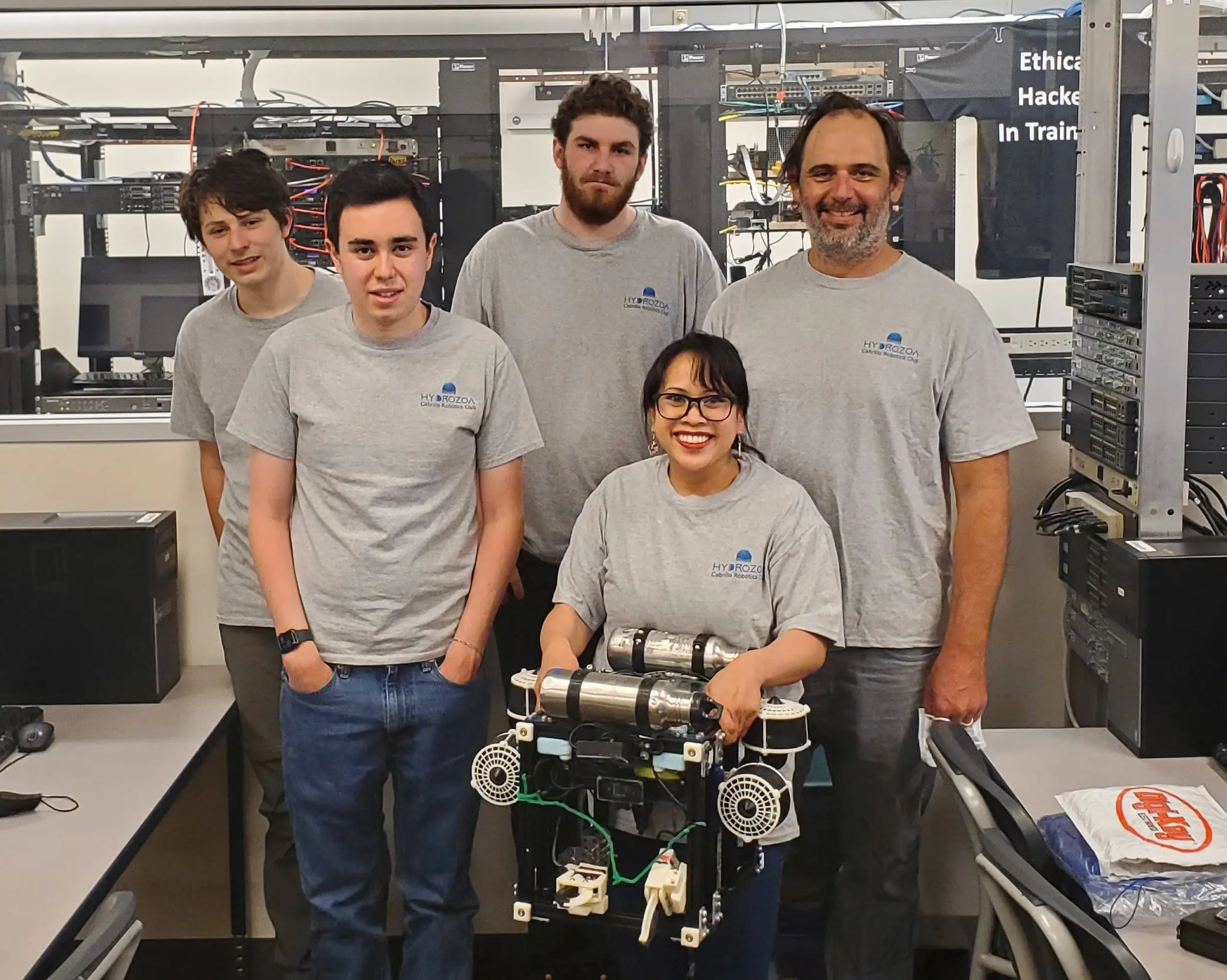
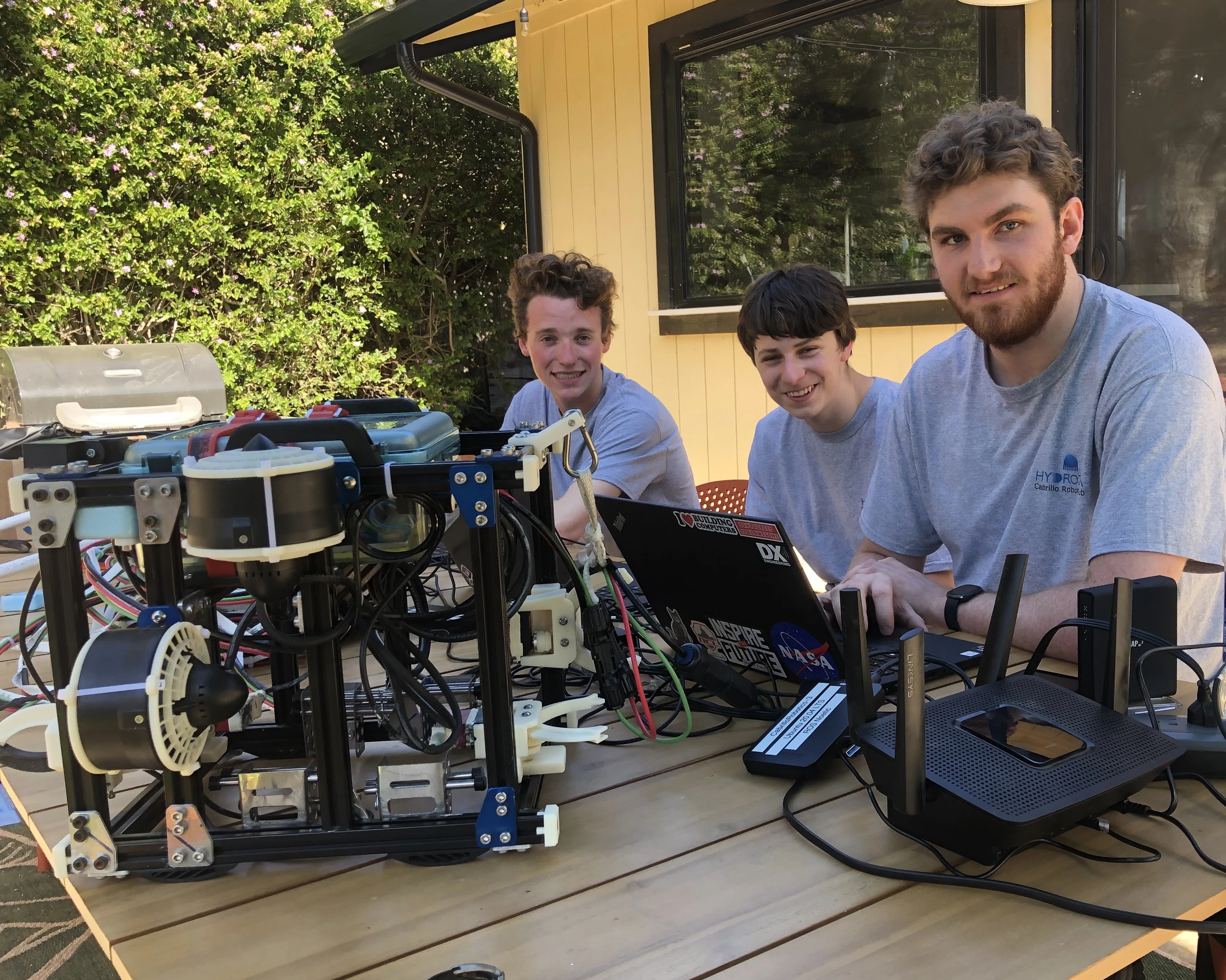
After more than 4500 hours of intensive design, manufacturing, and testing, five members of the Cabrillo Robotics team and their robot traveled 4080 km across the country to Kingsport, TN. They engaged in several days of rigorous events. Thanks to many hours of practice and exceptional piloting, they achieved impressive scores in the product demonstrations. Pilot, Isaac Eda, noted that, “a strength of this year’s ROV was its unique control systems that made it possible for me to navigate the tasks in record time.” Much thought and effort was put into maximizing the controllability of the robot. Both the hardware and software teams worked together to ensure piloting the ROV was as efficient and reliable as possible. During their presentation, judges noted the craftsmanship of the robot and were intrigued by the unique mechanical design choices. Additionally, the custom electronics stack and pilot dashboard received high praise for their ingenuity and impressive design.
After the events concluded, Cabrillo Robotics Club celebrated another remarkable victory, securing first place overall in the most advanced category of the competition. This triumph is particularly impressive given the team’s unique challenges and achievements. Competing for the first time in the Explorer Division with a completely redesigned ROV, this small team of community college students outperformed university teams from around the world. Participation in the MATE ROV competition over the years has provided learning and training that have shaped Cabrillo Robotic Team members into engineers soon to enter the workforce and move onto higher education. “Participating in MATE competitions provided us with the unique opportunity to develop invaluable technical and interpersonal skills” says President Stephanie L’Heureux, “We all hope to continue to be involved with MATE as mentors to future generations of students to share this valuable learning experience.”
After winning first place in their division of the MATE competition for three consecutive years, the Cabrillo Robotics Club is excited to conquer a new challenge for the 2024-2025 season. “The Cabrillo Robotics Club values the MATE ROV competition for its chance to explore our limits, take risks, and devise unconventional solutions to problems,” says Rowan Garites. “…however, we are ready to venture into new territory, the RoboSub competition appears to be a logical next step for us. It will definitely be challenging, our software, mechanical, and electrical teams will have their work cut out for them. Constructing an autonomous vehicle without a tether makes the engineering process exponentially more difficult,” adds Stephanie L’Heureux. RoboSub challenges teams worldwide to design and build Autonomous Underwater Vehicles (AUVs). Cabrillo Robotics Club is eager to participate in next year’s RoboSub competition and is actively seeking donations and sponsors for support.
The MATE competition challenges teams worldwide to build Remotely Operated Vehicles (ROVs). These tethered, submersible robots perform observation, inspection, and physical tasks in various aquatic environments. Competing teams must build an ROV capable of executing simulated industry applications in a product demonstration. They also showcase their robot’s functionality and design rationale through marketing, technical documentation, and an engineering presentation.
+ +Cabrillo Robotics has competed in the MATE Pioneer Division and achieved first place at the World Championship the last two consecutive years. This year, the club built a completely redesigned ROV to tackle the challenges in the most advanced class of the competition–Explorer. +The small team dedicated nearly a year to constructing an originally designed ROV, the SeaHawk II. Members developed fully custom software and hardware solutions resulting in a reliable vehicle capable of rapidly completing competition mission tasks. SeaHawk II stands as a testament to the mechanical, electrical, and software engineering skills of the team, with members from each specialty collaborating seamlessly to produce a professional-grade final product. Isaac Wax, Hardware Lead, commented “We believe in doing things the right way, not the easy way. Rather than settle for good enough, low-risk solutions, we executed innovative, high-risk designs across mechanical, electrical and software systems using cross-integration techniques yielding a streamlined, high-performance ROV. I believe that our team’s perseverance sticking to these values paid off to make Seahawk II a World Champion.” Cabrillo Robotics plans on making all components of the robot open source on GitHub.
+ +After more than 4500 hours of intensive design, manufacturing, and testing, five members of the Cabrillo Robotics team and their robot traveled 4080 km across the country to Kingsport, TN. They engaged in several days of rigorous events. Thanks to many hours of practice and exceptional piloting, they achieved impressive scores in the product demonstrations. Pilot, Isaac Eda, noted that, “a strength of this year’s ROV was its unique control systems that made it possible for me to navigate the tasks in record time.” Much thought and effort was put into maximizing the controllability of the robot. Both the hardware and software teams worked together to ensure piloting the ROV was as efficient and reliable as possible. During their presentation, judges noted the craftsmanship of the robot and were intrigued by the unique mechanical design choices. Additionally, the custom electronics stack and pilot dashboard received high praise for their ingenuity and impressive design.
+ +After the events concluded, Cabrillo Robotics Club celebrated another remarkable victory, securing first place overall in the most advanced category of the competition. This triumph is particularly impressive given the team’s unique challenges and achievements. Competing for the first time in the Explorer Division with a completely redesigned ROV, this small team of community college students outperformed university teams from around the world. +Participation in the MATE ROV competition over the years has provided learning and training that have shaped Cabrillo Robotic Team members into engineers soon to enter the workforce and move onto higher education. “Participating in MATE competitions provided us with the unique opportunity to develop invaluable technical and interpersonal skills” says President Stephanie L’Heureux, “We all hope to continue to be involved with MATE as mentors to future generations of students to share this valuable learning experience.”
+ +After winning first place in their division of the MATE competition for three consecutive years, the Cabrillo Robotics Club is excited to conquer a new challenge for the 2024-2025 season. “The Cabrillo Robotics Club values the MATE ROV competition for its chance to explore our limits, take risks, and devise unconventional solutions to problems,” says Rowan Garites. “…however, we are ready to venture into new territory, the RoboSub competition appears to be a logical next step for us. It will definitely be challenging, our software, mechanical, and electrical teams will have their work cut out for them. Constructing an autonomous vehicle without a tether makes the engineering process exponentially more difficult,” adds Stephanie L’Heureux. RoboSub challenges teams worldwide to design and build Autonomous Underwater Vehicles (AUVs). Cabrillo Robotics Club is eager to participate in next year’s RoboSub competition and is actively seeking donations and sponsors for support.
]]>Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
Gallery
About Us
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum. Viverra habitasse quis cras sem etiam aptent ad. Orci nam praesent proin faucibus faucibus libero augue euismod. Nascetur fusce vestibulum tempus natoque nulla suscipit ultrices porta iaculis. Aauctor tristique enim vitae sem accumsan. Etiam ipsum risus ligula dictum nunc consequat senectus aenean. Tempus natoque aenean, tempor fermentum suspendisse dui varius nam.
Meet SeaHawk II
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum. Lorem ipsum odor amet, consectetuer adipiscing elit. Maecenas sollicitudin dapibus; vestibulum et blandit pellentesque augue volutpat. Magna sodales ornare nascetur fermentum arcu diam. Lacus consequat mollis condimentum parturient magnis rutrum imperdiet egestas. Ad nisi vestibulum at cubilia bibendum eu consectetur. Pellentesque venenatis parturient suscipit vel iaculis etiam. Alorem pulvinar porta est natoque augue dictum. Proin rutrum tristique dictum ultricies lectus tellus phasellus. Facilisis lectus quisque tristique ut duis ultrices himenaeos dictum. Magnis ex porta porta, nullam tempus laoreet.
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
Gallery
Projects
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
Gallery














Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
Gallery











Cabrillo Robotics Club (CRC) is a dedicated team of students from Cabrillo College in Aptos, California united by a mutual passion for robotics. We design and engineer cutting-edge solutions, drawing from the diverse experience and knowledge of our interdisciplinary members. The team is structured into four specialized subteams: Electrical, Mechanical, Software, and Marketing. This decentralized approach fosters autonomy within each division, allowing members to focus on their areas of expertise, while working collaboratively to create innovative and reliable robotic systems.
Members
Stephanie L'Heureux
Software & Marketing
Liam Gilligan
Software
Isaac Wax
Electrical & Mechanical
Rowan Garties
Mechanical
Massimo Ginella
Software
Mentors
Mike Matera
CIS Chair
Andrew Thach
CS Professor
Alumni
Isaac Eda
SJSU EE