Autopilot for F-15 #444
Replies: 38 comments 64 replies
-
|
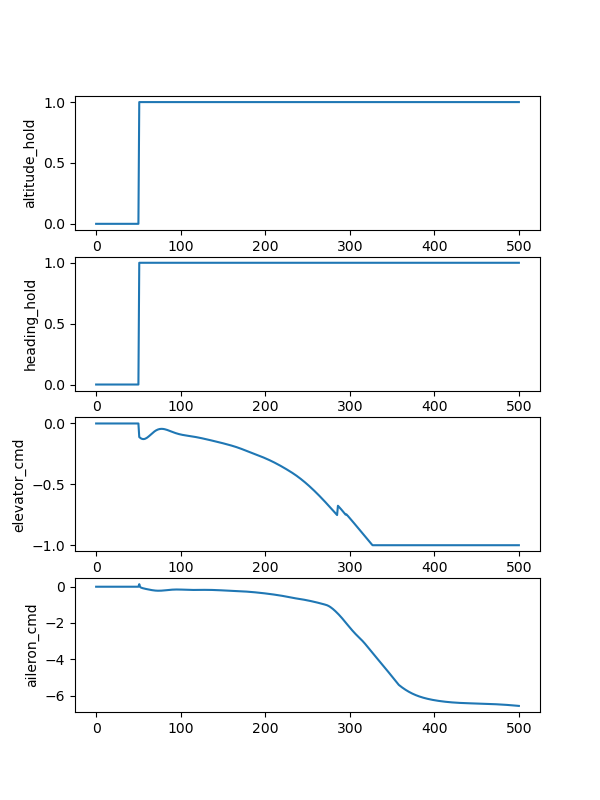
Are you sure that altitude hold is enabled? Plot the auto-pilot modes to confirm and also the autopilot outputs in terms of the elevator and aileron control. |
Beta Was this translation helpful? Give feedback.
-
|
Thanks for your reply, the bellowing are the curves of '/fdm/jsbsim/ap/altitude_hold', '/fdm/jsbsim/ap/heading_hold', '/fdm/jsbsim/ap/elevator_cmd', '/fdm/jsbsim/ap/aileron_cmd' respectively. |
Beta Was this translation helpful? Give feedback.
-
|
The F-15 autopilot and FCS was redone by @Octal450 (Josh) and are tightly integrated with the FCS and complicated Probably I'd start by confirming that you can control the surfaces and the aircraft. Also if this is just for fun you might find it easier to use the F-15 with a simpler autopilot such as in commit Zaretto/fg-aircraft@25137708 |
Beta Was this translation helpful? Give feedback.
-
|
@Zaretto I tried to implement a link in your post to what you referred as |
Beta Was this translation helpful? Give feedback.
-
|
@bcoconni My meaning was to checkout my repository using commit ID be67fefc or 2513770. Between these two commits the aircraft is the mostly same but I originally chose 2513770 because that was a release version; however anything prior to October 2017 will have the old autoflight which may be easier to work with; there is a JSBSim system for altitude hold that works with F-15-AFCS.xml (FG autopilot). see: https://github.com/Zaretto/fg-aircraft/tree/be67fefc4d581f2b47dea3d4ba3778ab5a628f25/aircraft/F-15 this was the main autoflight system before Josh rewrote it; https://github.com/Zaretto/fg-aircraft/blob/be67fefc4d581f2b47dea3d4ba3778ab5a628f25/aircraft/F-15/Systems/f-15-AFCS.xml |
Beta Was this translation helpful? Give feedback.
-
|
@theorynice The file |
Beta Was this translation helpful? Give feedback.
-
|
Thanks for your reply and suggestion @bcoconni @Zaretto @Octal450 . I have developed a controller using deep reinforcement based on JSBSim with f15 aircraft. For publishing this work in a journal, I need to make a comparison with the traditional control method, such as PID control, in coordinated turn task and climb/descent task. So, my recent urgent work is realizing the PID control in these tasks. |
Beta Was this translation helpful? Give feedback.
-
|
Is the aircraft trimmed to a steady flight before enabling the autopilot ? If not, have you checked that the throttle is set so that the engine produce enough thrust to maintain a constant altitude ? |
Beta Was this translation helpful? Give feedback.
-
|
I test the autopilot based on scripts c172_cruise_8K.xml. I mainly modify the aircraft name, initial file and other small problems to let it run successfully. The modified file is shown below: <?xml version="1.0" encoding="UTF-8"?>
<?xml-stylesheet type="text/xsl" href="http://jsbsim.sourceforge.net/JSBSimScript.xsl"?>
<runscript xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation="http://jsbsim.sf.net/JSBSimScript.xsd"
name="C172 cruise at 4K, 100% power">
<description>This run is for testing the C172 altitude hold autopilot and cruise performance</description>
<use aircraft="f15" initialize="reset01"/>
<run start="0.0" end="50" dt="0.0083333">
<property value="0"> simulation/run_id </property>
<event name="Set Temperature">
<condition>
simulation/sim-time-sec ge 0.0
</condition>
<set name="atmosphere/delta-T">
<function>
<switch>
<p> simulation/run_id </p>
<v> 0.0 </v>
<v> -36.0 </v>
<v> 36.0 </v>
</switch>
</function>
</set>
<set name="ap/altitude_setpoint" value="4000.0"/>
</event>
<event name="Start engine">
<condition>
simulation/sim-time-sec ge 0.01
</condition>
<set name="fcs/throttle-cmd-norm" action="FG_RAMP" value="1.0" tc="0.05"/>
<set name="fcs/mixture-cmd-norm" action="FG_RAMP" value="1.0" tc="0.05"/>
<!--<set name="propulsion/magneto_cmd" value="3"/>-->
<set name="propulsion/starter_cmd" value="1"/>
<notify/>
</event>
<event name="Trim">
<condition>
simulation/sim-time-sec gt 1.0
</condition>
<set name="simulation/do_simple_trim" value="1"/>
<notify>
<property> velocities/u-aero-fps </property>
<property> velocities/v-aero-fps </property>
<property> velocities/w-aero-fps </property>
<property> attitude/psi-rad </property>
<property> attitude/theta-rad </property>
<property> attitude/phi-rad </property>
<property> position/h-agl-ft </property>
<property> accelerations/pdot-rad_sec2 </property>
<property> accelerations/qdot-rad_sec2 </property>
<property> accelerations/rdot-rad_sec2 </property>
<property> propulsion/engine/thrust-lbs </property>
<!--<property> propulsion/engine/propeller-rpm </property>-->
<property> velocities/p-rad_sec </property>
<property> velocities/q-rad_sec </property>
<property> velocities/r-rad_sec </property>
<property> fcs/elevator-cmd-norm </property>
<property> fcs/aileron-cmd-norm </property>
<property> fcs/rudder-cmd-norm </property>
<property> fcs/elevator-pos-norm </property>
<property> fcs/right-aileron-pos-norm </property>
<property> fcs/rudder-pos-norm </property>
<property> fcs/throttle-pos-norm[0] </property>
<property> fcs/mixture-pos-norm[0] </property>
<property> inertia/weight-lbs </property>
<property> velocities/vc-kts </property>
<property> velocities/ve-kts </property>
<property> velocities/vtrue-kts </property>
<property> atmosphere/T-R </property>
<property> propulsion/engine/fuel-flow-rate-gph </property>
<!--<property> propulsion/engine/power-hp </property>-->
</notify>
</event>
<event name="Hold heading and altitude">
<condition>simulation/sim-time-sec ge 5</condition>
<set name="ap/heading_setpoint" value="200"/>
<set name="ap/heading_hold" value="1"/>
<set name="ap/altitude_setpoint" value="4000.0"/>
<set name="ap/altitude_hold" value="1"/>
<notify/>
</event>
<!--
<event name="Introduce gust">
<condition> simulation/sim-time-sec ge 10 </condition>
<set name="atmosphere/cosine-gust/startup-duration-sec" value="5"/>
<set name="atmosphere/cosine-gust/steady-duration-sec" value="1"/>
<set name="atmosphere/cosine-gust/end-duration-sec" value="5"/>
<set name="atmosphere/cosine-gust/magnitude-ft_sec" value="30"/>
<set name="atmosphere/cosine-gust/frame" value="2"/>
<set name="atmosphere/cosine-gust/X-velocity-ft_sec" value="-1"/>
<set name="atmosphere/cosine-gust/Y-velocity-ft_sec" value="0"/>
<set name="atmosphere/cosine-gust/Z-velocity-ft_sec" value="0"/>
<set name="atmosphere/cosine-gust/start" value="1"/>
<notify/>
</event> -->
<event name="Reset">
<condition logic="AND">
simulation/sim-time-sec >= 60.0
simulation/terminate != 1
</condition>
<set name="ap/heading_setpoint" value="0"/>
<!-- <set name="ap/altitude_setpoint" value="0"/> -->
<set name="ap/altitude_hold" value="0"/>
<set name="ap/heading_hold" value="0"/>
<set name="simulation/reset" value="1"/>
<set name="simulation/run_id" type="FG_DELTA" value="1"/>
<notify>
<property> simulation/run_id </property>
</notify>
</event>
<event name="Terminate on run ID">
<condition>
simulation/run_id ge 3
</condition>
<set name="simulation/terminate" value="1"/>
<notify>
<property caption="Terminate: "> simulation/terminate </property>
</notify>
</event>
</run>
</runscript>
|
Beta Was this translation helpful? Give feedback.
-
|
Fyi for vs to pitch I used a FlightGear autopilot file because it allows me much better resume behavior and is offset based not absolute value. Without it, he will maybe not do anything to pitch. I didn't quite understand what you are trying to do, but I wouldn't suggest any autopilot from the c172 to be used rather that you do it custom. Kind Regards, |
Beta Was this translation helpful? Give feedback.
-
|
if you had a table like this alpha dv then when alpha is 0 dv is 0. when alpha is 5 dv is 10. when alpha is 10 dv is 20. A 2d table does this in two dimensions. |
Beta Was this translation helpful? Give feedback.
-
Yes correct affirmative exactly. But usually i never needed to schedule by altitude only by airspeed (as this takes care of the density due to altitude aswel) But I'm not sure your table makes sense. The gains should decrease with speed as the surfaces get more sensitive. (see the one in my autopilot) I would start by disregarding anything before the autoflight/roll/roll-rate-error (and pitch) and then take autoflight/roll/roll-rate-p (and pitch) and initialize them. Start at 0 and make sure turning on the system brings the rates to a bout 0 with your tunings. Then you can add some things like setting rates to +/- 1, 2, 5 and monitor the system response and continue tuning until the design is optional. I don't know what tools you have access to, but in FG I use the Phi interface to easily plot the outputs of the controllers for tuning. Which aerodynamic model he uses should not matter as he is tuning the system from scratch. The only gains that really should need to be changed are the roll/pitch rates. The rest typically can apply thruout various aircraft (I've internally designed my autopilots to be fairly cross compatible when possible) Please let me know if this helps. Kind Regards, |
Beta Was this translation helpful? Give feedback.
-
@Zaretto Clearly explain! it may main my fault contributing to failure. |
Beta Was this translation helpful? Give feedback.
-
Dear Josh, |
Beta Was this translation helpful? Give feedback.
-
@Octal450 it matters in the sense that he is wanting to publish a journal paper comparing his reinforcement learning based autopilot to a more traditional PID based autopilot. So for a fair comparison both the reinforcement learning version and the PID version need to use the same aerodynamic model. I'm guessing it will be less work for him to tune a PID version on the JSBSim f15 model compared to re-training his reinforcement learning model on the FG f15 model. |
Beta Was this translation helpful? Give feedback.
-
|
@theorynice are you using the F-15 model that ships with JSBSim, or are you using @Zaretto's F-15 model? |
Beta Was this translation helpful? Give feedback.
-
|
The models that ships with JSBSim, @seanmcleod |
Beta Was this translation helpful? Give feedback.
-
@Octal450, could you please elaborate a bit on this ? I'm not sure I'm getting what you mean by "VS of 0" or "barometric 0 VS" ? |
Beta Was this translation helpful? Give feedback.
-
|
Hi @bcoconni Kind Regards, |
Beta Was this translation helpful? Give feedback.
-
|
Hi, all |
Beta Was this translation helpful? Give feedback.
-
<?xml version="1.0"?>
<!--
Author: Jon Berndt
Date: 18 August 2002
Function: C-172 autopilot test file
Note: this file represents a test only of the new autopilot
setup in JSBSim. The same components used in the FCS
can also be used in the autopilot section. There are
some new FCS input and output identifiers directly
related to the autopilot:
ap/elevator_cmd,
ap/aileron_cmd,
ap/attitude_hold,
ap/altitude_hold,
ap/heading_hold,
ap/altitude_setpoint,
ap/heading_setpoint
-->
<autopilot name="F15 Autopilot">
<!-- INTERFACE PROPERTIES -->
<property> ap/attitude_hold </property>
<property> ap/altitude_hold </property>
<property> ap/heading_hold </property>
<property> ap/altitude_setpoint </property>
<property> ap/heading_setpoint </property>
<property> ap/aileron_cmd </property>
<property> ap/elevator_cmd </property>
<property> ap/airspeed_setpoint </property>
<property> ap/airspeed_hold </property>
<property> ap/throttle-cmd-norm </property>
<!-- INITIAL GAIN VALUES -->
<property value="0.5"> ap/hdg-roll-err-c1 </property>
<property value="50.0"> ap/roll-pid-kp </property>
<property value="5.0"> ap/roll-pid-ki </property>
<property value="17.0"> ap/roll-pid-kd </property>
<!--
=====================================================
ROLL CHANNEL
=====================================================
-->
<!-- Wing leveler -->
<channel name="Roll wing leveler">
<sensor name="fcs/attitude/sensor/phi-rad">
<input> attitude/phi-rad </input>
<lag> 0.5 </lag>
<delay> 2 </delay>
<noise variation="PERCENT" distribution="GAUSSIAN"> 0.05 </noise>
<quantization name="attitude/sensor/quantized/phi-rad">
<bits> 12 </bits>
<min> -3.1416 </min>
<max> 3.1416 </max>
</quantization>
<bias> 0.001 </bias>
</sensor>
<switch name="fcs/wing-leveler-ap-on-off">
<default value="-1"/>
<test value="0">
ap/attitude_hold == 1
</test>
</switch>
<pid name="fcs/roll-ap-error-pid">
<input>attitude/phi-rad</input>
<kp> ap/roll-pid-kp </kp>
<ki> ap/roll-pid-ki </ki>
<kd> ap/roll-pid-kd </kd>
<trigger> fcs/wing-leveler-ap-on-off </trigger>
</pid>
<switch name="fcs/roll-ap-autoswitch">
<default value="0.0"/>
<test value="-fcs/roll-ap-error-pid">
ap/attitude_hold == 1
</test>
</switch>
</channel>
<!-- Heading hold -->
<channel name="Roll heading hold">
<pure_gain name="fcs/heading-true-degrees">
<input>attitude/heading-true-rad</input>
<gain>57.3</gain> <!-- convert to degrees -->
</pure_gain>
<summer name="fcs/heading-error">
<input> -fcs/heading-true-degrees</input>
<input> ap/heading_setpoint </input>
</summer>
<switch name="fcs/heading-error-bias-switch">
<default value="0.0"/>
<test value="360.0">
fcs/heading-error lt -180
</test>
<test value="-360.0">
fcs/heading-error gt 180
</test>
</switch>
<summer name="fcs/heading-corrected">
<input> fcs/heading-error-bias-switch </input>
<input> fcs/heading-error </input>
<clipto>
<min>-33</min>
<max>33</max>
</clipto>
</summer>
<pure_gain name="fcs/heading-command">
<input> fcs/heading-corrected </input>
<gain> 0.02265 </gain>
</pure_gain>
<lag_filter name="fcs/heading-roll-error-lag">
<input> fcs/heading-command </input>
<c1> ap/hdg-roll-err-c1 </c1>
</lag_filter>
<summer name="fcs/heading-roll-error">
<input> fcs/heading-roll-error-lag </input>
<input> -attitude/phi-rad </input>
</summer>
<switch name="fcs/heading-roll-error-switch">
<default value="0.0"/>
<test value="fcs/heading-roll-error">
ap/heading_hold == 1
</test>
</switch>
<pid name="fcs/heading-pi-controller">
<input> fcs/heading-roll-error-switch </input>
<kp> 7.0 </kp>
<ki> 0.20 </ki>
<kd> 6.0 </kd>
</pid>
<switch name="fcs/roll-command-selector">
<default value="0.0"/>
<test value="fcs/heading-pi-controller">
ap/heading_hold == 1
gear/unit[2]/WOW == 0
</test>
<test value="fcs/roll-ap-autoswitch">
ap/attitude_hold == 1
gear/unit[2]/WOW == 0
</test>
<output>ap/aileron_cmd</output>
<clipto>
<min>-1.0</min>
<max> 1.0</max>
</clipto>
</switch>
<!--
<switch name="fcs/roll-command-selector-steering">
<default value="0.0"/>
<test value="fcs/heading-pi-controller">
ap/heading_hold == 1
gear/unit/WOW == 1
</test>
<output>fcs/steer-cmd-norm</output>
</switch>
-->
</channel>
<!--
=====================================================
PITCH CHANNEL
=====================================================
-->
<!-- Altitude hold -->
<!-- The Altitude Error component below computes the altitude error, subtracting
the desired altitude (altitude_setpoint) from the actual altitude above sea
level (_not_ Above Ground Level). This error signal is interpreted as an
hdot command (hdot is time rate of change of altitude, or rate of climb). As
such it is limited to a maximum absolute value of 12 fps here (720 fpm). The
maximum achievable climb rate depends on altitude. The commanded climb rate
is scheduled in the HDot Command component, below. For the given altitude
(left column in the table), the commanded maaximum climb rate divided by 100
is given in the right column.
-->
<channel name="Pitch altitude hold">
<!--
The difference between the desired altitude and the actual altitude
is determined, and limited to 100. The output from this component is
the desired climb rate in percent of maximum.
-->
<summer name="fcs/altitude-error">
<input> ap/altitude_setpoint </input>
<input> -position/h-agl-ft </input>
<clipto>
<min>-150</min>
<max> 150</max>
</clipto>
</summer>
<!--
The desired climb rate is lagged slightly for stability.
-->
<lag_filter name="fcs/alt-error-lag">
<input> fcs/altitude-error </input>
<c1> 1 </c1>
</lag_filter>
<!--
Dependent on altitude, the lagged (and limited) altitude error is multipled
by the scheduled gain determined from the table, below. The output from this
component is the absolute climb rate in feet/second. For example, if the desired
climb rate is 100 percent of maximum and the current altitude is 1000.0 ft., then
the output from this component would be 11 ft. sec.
-->
<scheduled_gain name="fcs/hdot-command">
<input> fcs/alt-error-lag </input>
<table>
<independentVar>position/h-sl-ft</independentVar>
<tableData>
0.0 0.62
1000.0 0.61
2000.0 0.60
3000.0 0.596
4000.0 0.493
5000.0 0.486
6000.0 0.478
7000.0 0.469
8000.0 0.461
9000.0 0.453
10000.0 0.445
11000.0 0.437
12000.0 0.428
</tableData>
</table>
</scheduled_gain>
<!--
This component calculates the climb rate error, taking the difference between
the commanded climb rate (from the previous component) and actual climb rate
in ft./sec.
-->
<summer name="fcs/hdot-error">
<input> fcs/hdot-command </input>
<input> -velocities/h-dot-fps </input>
</summer>
<!--
If the altitude hold autopilot command is ON, then this switch component will
pass through the climb rate error (from the previous component). Otherwise, it
will pass zero.
-->
<switch name="fcs/ap-alt-hold-switch">
<default value="0.0"/>
<test value="fcs/hdot-error">
ap/altitude_hold == 1
</test>
</switch>
<!--
The windup trigger below assumes the elevator will travel +/-23 degrees. The
elevator, however, does not travel symmetrically. This will need to be addressed
in a fix to the deadband component.
-->
<deadband name="fcs/windup-trigger">
<input> fcs/elevator-pos-deg </input>
<width>46.0</width>
</deadband>
<!--
The integrator integrates the hdot error (when the switch component passes that
signal through above when the altitude hold is selected ON). In the situation
where the elevator becomes saturated, the integrator ceases to integrate. The
windup protection is indicated below, with the windup-trigger property being
the trigger to halt integration. When the windup trigger is non-zero (when the
elevator position falls outside the range +/- 23 degrees - a deadband of 46
degrees) then the deadband passes a non-zero value, triggering the anti-windup
logic in the integrator.
The proportional component multiplies the error signal by a constant, providing
the proportional control action of this PI altitude hold controller.
The pid component combines the proportional and integral control
signals. It clips the sum to +/- 1.0.
-->
<pid name="fcs/altitude-hold-pid">
<input> fcs/ap-alt-hold-switch </input>
<kp> 0.01 </kp>
<ki> 0.00015 </ki>
<kd> 0.0023 </kd>
<trigger> fcs/windup-trigger </trigger>
<clipto> <min>-1.0</min>
<max> 1.0</max> </clipto>
</pid>
<!--
The elevator component flips the sign on the output of the control summer
above and sets the ap/elevator_command property.
-->
<pure_gain name="fcs/elevator">
<input> fcs/altitude-hold-pid </input>
<gain> -1.0 </gain>
<output> ap/elevator_cmd </output>
</pure_gain>
</channel>
</autopilot>This is the PID parameters I tune for F15 based on the c172 autopilot file. |
Beta Was this translation helpful? Give feedback.
-
|
@theorynice Thank you so much! I will play with it to see if I can make sense any of these. |
Beta Was this translation helpful? Give feedback.
-
|
dang...it doesn't work for my purpose :( . I don't know what's needed to keep the aircraft flying without losing altitude and speed. |
Beta Was this translation helpful? Give feedback.
-
|
I have a similar problem when writing the f16 autopilot, I don't know how to solve it, I am applying C310ap.xml from JSBSim to f16 and rewriting the pitch yaw roll Channel, but it still doesn't work, can you make some suggestions? |
Beta Was this translation helpful? Give feedback.
-
|
我在编写f16自动驾驶仪时也遇到了类似的问题,不知道该怎么解决,我是将JSBSim中的C310ap.xml运用到f16中,并且改写了pitch yaw roll Channel,但还是不成功,可以提一些建议吗 |
Beta Was this translation helpful? Give feedback.
-
|
@ha-2022 take a look at @Octal450's IT-AutoFlight - https://github.com/Octal450/IT-AUTOFLIGHT, although it's not a pure JSBSim solution, it uses Nasal etc. it will give you some ideas in terms of developing an auto-pilot to handle multiple aircraft types etc. |
Beta Was this translation helpful? Give feedback.
-
|
@seanmcleod Thank you for your reply. I just looked at that and it's for FlightGear. I was hoping for a good simple standalone JSBsim autopilot example that could just keep the aircraft in the air for extended period of time. |
Beta Was this translation helpful? Give feedback.
-
|
@ha-2022 Can you give me a more specific example of what autoflight capabilities you need? I might be able to make one real quick. Kind Regards, |
Beta Was this translation helpful? Give feedback.
-
|
@Octal450 Thank you so much!!! |
Beta Was this translation helpful? Give feedback.
-
|
@ha-2022 generally people answering discussion requests here aren't going to download and unzip your code and then perform a diff or manually inspect your code looking for the issue. Rather show the relevant changes in the discussion, or fork the JSBSim repo and provide a link to a commit showing your changes. Have you double-checked simple things like, is the engine actually running? |
Beta Was this translation helpful? Give feedback.
-
|
Oh ok. My first time posting for help so wasn't sure what to include. Thanks for the tips. dt = 0.01;
//Load initial conditions
fdmExec.GetIC()->SetAltitudeASLFtIC(20000);
fdmExec.GetIC()->SetGeodLatitudeRadIC(0.52);
fdmExec.GetIC()->SetLongitudeRadIC(-1.64);
fdmExec.GetIC()->SetUBodyFpsIC(1013); //=600 knots
fdmExec.GetIC()->SetPsiDegIC(90);
fdmExec.Setdt(dt);
//apply initial conditions
fdmExec.RunIC();
//Start engines and heading autopilot
fdmExec.GetPropulsion()->InitRunning(-1);
setPropValue(AP_HEADING_HOLD, 1);
while (true)
{
double heading = std::fmod(getCurrentHeadingRad() + TWO_PI, TWO_PI);
setApAltitudeSetpoint(20000);
setApGroundSpeedSetpoint(1013); //=600 knots
setApHeadingErrorRad(1.5708 - heading); //maintain heading at 90 degrees
fdmExec.Run();
sim_nsleep(dt*1e+9);
}Here's the autopilot. I just use the existing one from the KC135-E model. <?xml version="1.0"?>
<autopilot name="F-35B Autopilot">
<!-- INTERFACE PROPERTIES -->
<property>ap/attitude_hold</property>
<property>ap/yaw_damper</property>
<property>ap/active-waypoint</property>
<property>ap/altitude_setpoint</property>
<property>ap/heading_hold</property>
<property>ap/heading_setpoint</property>
<property>ap/heading-setpoint-select</property>
<property>ap/aileron_cmd</property>
<property>ap/elevator_cmd</property>
<property>ap/rudder_cmd</property>
<property>ap/groundspeed_setpoint</property>
<property>ap/airspeed_hold</property>
<property>ap/throttle-cmd-norm</property>
<property>ap/heading-error-rad</property>
<property>ap/use_expedited_turn</property>
<property value="0.104">ap/roll-rate-width</property>
<property value="0.41">ap/max_bank_angle_rad</property>
<property value="0.79">ap/expedited_bank_angle_rad</property>
<!-- Added these properties to get the model to load <4/27/22>-->
<property>/sim/model/pushback/position-norm</property>
<property>/gear/gear/wow</property>
<property>/sim/model/pushback/ki</property>
<property>/sim/model/pushback/kp</property>
<property>/sim/model/pushback/kd</property>
<property>fcs/throttle1</property>
<property>fcs/throttle2</property>
<property>fcs/throttle3</property>
<property>fcs/autothrottle-cmd-norm</property>
<property>ap/roll-pid-ki</property>
<property>ap/roll-pid-kp</property>
<property>ap/roll-pid-kd</property>
<property>guidance/wp-heading-deg</property>
<!-- =============================================================== -->
<!-- Altitude Hold -->
<!-- =============================================================== -->
<channel name="Altitude Hold">
<summer name="ap/alt-error">
<input> ap/altitude_setpoint </input>
<input> -position/h-sl-ft </input>
</summer>
<lag_filter name="ap/alt-error-lag">
<input> ap/alt-error </input>
<c1> 1 </c1>
</lag_filter>
<pid name="ap/target-climb-rate-fps">
<input> ap/alt-error-lag </input>
<kp> 0.1 </kp>
<clipto>
<min>-25</min>
<max>25</max>
</clipto>
</pid>
<summer name="ap/climb-rate-error">
<input> ap/target-climb-rate-fps </input>
<input> -velocities/h-dot-fps </input>
</summer>
<pid name="ap/elevator-pid">
<input> ap/climb-rate-error </input>
<kp> -0.01 </kp>
<ki> -0.001 </ki>
<kd> -0.002 </kd>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
<output>fcs/elevator-cmd-norm</output>
</pid>
</channel>
<!-- =============================================================== -->
<!-- Auto Throttle -->
<!-- =============================================================== -->
<channel name="Auto Throttle">
<summer name="ap/speed-error">
<input> ap/groundspeed_setpoint </input>
<input> -velocities/vg-fps </input>
</summer>
<pid name="ap/throttle-pid">
<input> ap/speed-error </input>
<kp> 0.2 </kp>
<ki> 0 </ki>
<kd> 0.1 </kd>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
<output>fcs/throttle-cmd-norm[0]</output>
<output>fcs/throttle-cmd-norm[1]</output>
<output>fcs/throttle-cmd-norm[2]</output>
<output>fcs/throttle-cmd-norm[3]</output>
</pid>
</channel>
<!-- =============================================================== -->
<!-- Wing Leveler -->
<!-- =============================================================== -->
<channel name="Wing leveler">
<switch name="ap/wing-leveler-on-off">
<default value="-1"/>
<test value="0">
ap/attitude_hold == 1
</test>
</switch>
<pid name="ap/roll-error-pid">
<input>attitude/phi-rad</input>
<kp> 75 </kp>
<ki> 6 </ki>
<kd> 18 </kd>
<trigger> ap/wing-leveler-on-off </trigger>
</pid>
<switch name="ap/roll-ap-autoswitch">
<default value="0"/>
<test value="-ap/roll-error-pid">
ap/attitude_hold == 1
</test>
<clipto>
<min>-1</min>
<max> 1</max>
</clipto>
</switch>
</channel>
<!-- =============================================================== -->
<!-- Heading Hold -->
<!-- =============================================================== -->
<channel name="Roll heading hold">
<switch name="ap/heading-hold-on-off">
<default value="-1"/>
<test value="0">
ap/heading_hold == 1
</test>
</switch>
<switch name="ap/turn_amount_rad">
<default value="ap/max_bank_angle_rad"/>
<test value="ap/expedited_bank_angle_rad">
ap/use_expedited_turn == 1
</test>
</switch>
<lag_filter name="ap/heading-roll-error-lag">
<input> ap/heading-error-rad </input>
<c1> 0.5 </c1>
<clipto>
<min>-ap/turn_amount_rad</min>
<max>ap/turn_amount_rad</max>
</clipto>
</lag_filter>
<summer name="ap/heading-roll-error">
<input> ap/heading-roll-error-lag </input>
<input> -attitude/phi-rad </input>
</summer>
<pid name="ap/target-roll-rate">
<input> ap/heading-roll-error</input>
<kp> 30 </kp>
<ki> 0.1 </ki>
<kd> 0.1 </kd>
<clipto>
<min>-0.052</min>
<max>0.052</max>
</clipto>
</pid>
<deadband name="ap/roll-rate-saturation">
<input>ap/target-roll-rate</input>
<width>ap/roll-rate-width</width>
</deadband>
<summer name="ap/roll-rate-error">
<input> ap/target-roll-rate </input>
<input> -velocities/p-aero-rad_sec </input>
</summer>
<pid name="ap/heading-pid-controller">
<input> ap/roll-rate-error </input>
<c1> 100.0 </c1>
<kp> 2.5 </kp>
<ki> 0 </ki>
<kd> 0 </kd>
<trigger>ap/heading-hold-on-off</trigger>
</pid>
<switch name="ap/roll-command-selector">
<default value="0.0"/>
<test value="ap/heading-pid-controller">
ap/heading_hold == 1
</test>
<test value="ap/roll-ap-autoswitch">
ap/attitude_hold == 1
</test>
<output>fcs/aileron-cmd-norm</output>
</switch>
</channel>
</autopilot> |
Beta Was this translation helpful? Give feedback.
-
|
@ha-2022 what about some plots showing things like altitude, speed, control positions, throttle command, attitude etc. versus time? You also reference a F-35 aircraft model, but the JSBSim repo doesn't a F-35. So it's impossible to check, without a reference to the model what it's FCS implementation is and how compatible it may or may not be with your auto-pilot. |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for the reply!
Perhaps the F35-B model is not a good one to start with? It doesn't have to be that model, F16 or F22 would be an ok alternative. Though I've tried all those models they all dropped speed (rather quickly). Here's the F35-B model: <?xml version="1.0"?>
<?xml-stylesheet type="text/xsl" href="http://jsbsim.sourceforge.net/JSBSim.xsl"?>
<fdm_config name="Lockheed Martin F-35B" version="2.0" release="TRIAL"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation="http://jsbsim.sourceforge.net/JSBSim.xsd">
<fileheader>
<author> F-GTUX from Erik Hofman F-16 and aeromatic </author>
<filecreationdate> 2011-10-15 </filecreationdate>
<version> 1.0 </version>
<license>
<licenseName>GPL (General Public License)</licenseName>
<licenseURL>http://www.gnu.org/licenses/gpl.html</licenseURL>
</license>
<description> Models a F-35B. </description>
</fileheader>
<metrics>
<wingarea unit="FT2"> 459.67 </wingarea>
<wingspan unit="FT" > 35.11 </wingspan>
<wing_incidence> 2.00 </wing_incidence>
<chord unit="FT" > 13.09 </chord>
<htailarea unit="FT2"> 91.93 </htailarea>
<htailarm unit="FT" > 20.47 </htailarm>
<vtailarea unit="FT2"> 55.16 </vtailarea>
<vtailarm unit="FT" > 20.47 </vtailarm>
<location name="AERORP" unit="IN">
<x> 368.52 </x>
<y> 0.00 </y>
<z> 0.00 </z>
</location>
<location name="EYEPOINT" unit="IN">
<x> 122.84 </x>
<y> 0.00 </y>
<z> 36.00 </z>
</location>
<location name="VRP" unit="IN">
<x>0</x>
<y>0</y>
<z>20</z>
</location>
</metrics>
<mass_balance>
<ixx unit="SLUG*FT2"> 24918 </ixx>
<iyy unit="SLUG*FT2"> 89003 </iyy>
<izz unit="SLUG*FT2"> 82602 </izz>
<emptywt unit="LBS" > 32000 </emptywt>
<location name="CG" unit="IN">
<x> 368.52 </x>
<y> 0.00 </y>
<z> -15.36 </z>
</location>
</mass_balance>
<ground_reactions>
<contact type="BOGEY" name="NOSE">
<location unit="IN">
<x> 79.85 </x>
<y> 0.00 </y>
<z> -73.70 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000.00 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000.00 </damping_coeff>
<max_steer unit="DEG"> 45.00 </max_steer>
<brake_group>NONE</brake_group>
<retractable>1</retractable>
</contact>
<contact type="BOGEY" name="LEFT_MAIN">
<location unit="IN">
<x> 383.26 </x>
<y> -77.92 </y>
<z> -73.70 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="LBS/FT"> 30000.00 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 6000.00 </damping_coeff>
<max_steer unit="DEG">0</max_steer>
<brake_group>LEFT</brake_group>
<retractable>1</retractable>
</contact>
<contact type="BOGEY" name="RIGHT_MAIN">
<location unit="IN">
<x> 383.26 </x>
<y> 77.92 </y>
<z> -73.70 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="LBS/FT"> 30000.00 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 6000.00 </damping_coeff>
<max_steer unit="DEG">0</max_steer>
<brake_group>RIGHT</brake_group>
<retractable>1</retractable>
</contact>
<contact type="STRUCTURE" name="LEFT_WING">
<location unit="IN">
<x> 368.52 </x>
<y> -17.55 </y>
<z> -15.36 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<spring_coeff unit="LBS/FT"> 59535.00 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 11907.00 </damping_coeff>
</contact>
<contact type="STRUCTURE" name="RIGHT_WING">
<location unit="IN">
<x> 368.52 </x>
<y> 17.55 </y>
<z> -15.36 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<spring_coeff unit="LBS/FT"> 59535.00 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 11907.00 </damping_coeff>
</contact>
</ground_reactions>
<propulsion>
<engine file="F135-PW-600">
<location unit="IN">
<x> 454.20 </x>
<y> 0.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 0.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
<feed>0</feed>
<feed>1</feed>
<feed>2</feed>
<feed>3</feed>
<thruster file="direct">
<location unit="IN">
<x> 454.20 </x>
<y> 0.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 0.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
</thruster>
</engine>
<engine file="liftfan">
<location unit="IN">
<x> 164.20 </x>
<y> 0.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 90.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
<feed>0</feed>
<feed>1</feed>
<feed>2</feed>
<feed>3</feed>
<thruster file="direct">
<location unit="IN">
<x> 164.20 </x>
<y> 0.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 90.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
</thruster>
</engine>
<engine file="sidefan">
<location unit="IN">
<x> 368.52 </x>
<y> 80.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 90.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
<feed>0</feed>
<feed>1</feed>
<feed>2</feed>
<feed>3</feed>
<thruster file="direct">
<location unit="IN">
<x> 368.52 </x>
<y> 80.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 90.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
</thruster>
</engine>
<engine file="sidefan">
<location unit="IN">
<x> 368.52 </x>
<y> -80.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 90.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
<feed>0</feed>
<feed>1</feed>
<feed>2</feed>
<feed>3</feed>
<thruster file="direct">
<location unit="IN">
<x> 368.52 </x>
<y> -80.00 </y>
<z> -15.36 </z>
</location>
<orient unit="DEG">
<pitch> 90.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
</thruster>
</engine>
<tank type="FUEL"> <!-- Tank number 0 -->
<location unit="IN">
<x> 368.52 </x>
<y> 40.00 </y>
<z> -15.36 </z>
</location>
<capacity unit="LBS"> 6650 </capacity>
<contents unit="LBS"> 6650 </contents>
</tank>
<tank type="FUEL"> <!-- Tank number 1 -->
<location unit="IN">
<x> 368.52 </x>
<y> -40.00 </y>
<z> -15.36 </z>
</location>
<capacity unit="LBS"> 6650 </capacity>
<contents unit="LBS"> 6650 </contents>
</tank>
<tank type="FUEL"> <!-- External Tank number 0 (station 4) -->
<location unit="IN">
<x> 368.52 </x>
<y> 80.00 </y>
<z> -15.36 </z>
</location>
<capacity unit="LBS"> 2991 </capacity>
<contents unit="LBS"> 0 </contents>
</tank>
<tank type="FUEL"> <!-- External Tank number 1 (station 6) -->
<location unit="IN">
<x> 368.52 </x>
<y> -80.00 </y>
<z> -15.36 </z>
</location>
<capacity unit="LBS"> 2991 </capacity>
<contents unit="LBS"> 0 </contents>
</tank>
</propulsion>
<flight_control name="F-35B">
<!-- Declare some interface properties -->
<property>fcs/alpha-norm</property>
<property>fcs/canopy-engage</property>
<property>fcs/fbw-override</property>
<channel name="Flaps">
<fcs_function name="tef pos rad">
<function>
<description>none</description>
<sum>
<product>
<value>1</value>
<table>
<independentVar lookup="row">velocities/vc-kts</independentVar>
<tableData>
0 0.349
150 0.349
200 0
</tableData>
</table>
</product>
<product>
<value>1</value>
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0 0
0.85 0
0.95 -0.0349
</tableData>
</table>
</product>
</sum>
</function>
</fcs_function>
<aerosurface_scale name="flap pos norm">
<input>fcs/tef-pos-rad</input>
<domain>
<min>-0.0349</min>
<max>0.349</max>
</domain>
<range>
<min>-0.1</min>
<max>1</max>
</range>
<output>fcs/flap-pos-norm</output>
</aerosurface_scale>
</channel>
<channel name="Roll">
<!-- Calculate the normalized roll-rate -->
<pure_gain name="roll rate norm">
<input>velocities/p-aero-rad_sec</input>
<gain>0.09</gain>
</pure_gain>
<!--
- Calculate the difference between actual roll-rate and
- commanded roll-rate.
-->
<summer name="roll trim error">
<input>fcs/aileron-cmd-norm</input>
<input>-fcs/roll-rate-norm</input>
<input>fcs/roll-trim-cmd-norm</input>
<clipto>
<min> -1 </min>
<max> 1 </max>
</clipto>
</summer>
<pure_gain name="roll p">
<input>fcs/roll-trim-error</input>
<gain>3.00</gain>
</pure_gain>
<!--
- Make sure the integrator is only active when the aircraft
- has gained some speed. This will prevent bad behaviour when the
- aircraft has been parked for a while.
-->
<switch name="aileron trigger">
<default value="1"/>
<test value="0">
velocities/vc-kts lt 5.0
</test>
</switch>
<integrator name="roll i">
<input>fcs/roll-trim-error</input>
<trigger>fcs/aileron-trigger</trigger>
<c1>0.0005</c1>
</integrator>
<lead_lag_filter name="roll d">
<input>fcs/roll-trim-error</input>
<c1>0.00125</c1>
<c2>0.0</c2>
<c3>0.000125</c3>
<c4>1</c4>
</lead_lag_filter>
<summer name="roll command">
<input>fcs/roll-p</input>
<input>fcs/roll-i</input>
<input>fcs/roll-d</input>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
</summer>
<kinematic name="roll trim sum">
<input>fcs/roll-command</input>
<traverse>
<setting>
<position>-1</position>
<time>0.35</time>
</setting>
<setting>
<position>1</position>
<time>0.35</time>
</setting>
</traverse>
<output>fcs/roll-trim-sum</output>
</kinematic>
<aerosurface_scale name="left-aileron-pos-rad">
<input>fcs/roll-trim-sum</input>
<range>
<min> -0.40 </min>
<max> 0.40 </max>
</range>
<output>fcs/left-aileron-pos-rad</output>
</aerosurface_scale>
<aerosurface_scale name="Aileron Pos Norm">
<input>fcs/left-aileron-pos-rad</input>
<domain>
<min>-0.40</min>
<max>0.40</max>
</domain>
<range>
<min>-1</min>
<max>1</max>
</range>
<output>fcs/aileron-pos-norm</output>
</aerosurface_scale>
</channel>
<channel name="Pitch">
<!--
- The F-16 has a G limit of 9G positive and 4G negative (44.44%
- of 9G). This section limits the stick output to 100% up and 44%
- down.
-->
<summer name="elevator-cmd-limiter">
<input>fcs/elevator-cmd-norm</input>
<input>fcs/pitch-trim-cmd-norm</input>
<clipto>
<min>-1</min>
<max>0.44</max>
</clipto>
</summer>
<fcs_function name="fcs/g-load-norm">
<function>
<description>none</description>
<product>
<value>1</value>
<table>
<independentVar lookup="row">accelerations/n-pilot-z-norm</independentVar>
<tableData>
-12 0.8
-4 0
0 0
2.33 0
7 -0.8
</tableData>
</table>
</product>
</function>
</fcs_function>
<fcs_function name="fcs/alpha-limiter">
<function>
<description>none</description>
<product>
<property>aero/alpha-rad</property>
<value>1.0472</value>
<table>
<independentVar lookup="row">fcs/fbw-override</independentVar>
<tableData>
0 1
1 0
</tableData>
</table>
</product>
</function>
</fcs_function>
<summer name="g load error">
<input>fcs/elevator-cmd-limiter</input>
<input>fcs/g-load-norm</input>
<input>fcs/alpha-limiter</input>
</summer>
<pure_gain name="g load p">
<input>fcs/g-load-error</input>
<gain>0.66</gain>
</pure_gain>
<!--
- Make sure the integrator is only active when the aircraft
- has gained some speed. This will prevent bad behaviour when the
- aircraft has been parked for a while.
-->
<switch name="elevator trigger">
<default value="1"/>
<test value="0">
velocities/vc-kts lt 5.0
</test>
</switch>
<integrator name="g load i">
<input>fcs/g-load-error</input>
<trigger>fcs/elevator-trigger</trigger>
<c1>0.005</c1>
</integrator>
<lead_lag_filter name="g load d">
<input>fcs/g-load-error</input>
<c1>0.000125</c1>
<c2>0.0</c2>
<c3>0.0000125</c3>
<c4>1</c4>
</lead_lag_filter>
<summer name="g load command">
<input>fcs/g-load-p</input>
<input>fcs/g-load-i</input>
<input>fcs/g-load-d</input>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
</summer>
<kinematic name="elevator position">
<input>fcs/g-load-command</input>
<traverse>
<setting>
<position>-1</position>
<time>0.35</time>
</setting>
<setting>
<position>1</position>
<time>0.35</time>
</setting>
</traverse>
<output>fcs/elevator-pos-norm</output>
</kinematic>
<aerosurface_scale name="elevator-pos-rad">
<input>fcs/elevator-pos-norm</input>
<range>
<min>-0.79</min>
<max>0.79</max>
</range>
<output>fcs/elevator-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Yaw">
<!-- Calculate the normalized yaw-rate -->
<pure_gain name="yaw rate norm">
<input>velocities/r-aero-rad_sec</input>
<gain>100</gain>
</pure_gain>
<!-- Calculate the normalized yaw-load -->
<pure_gain name="yaw load norm">
<input>accelerations/n-pilot-y-norm</input>
<gain>0.25</gain>
</pure_gain>
<!--
- Calculate the difference between the current yaw-rate
- and the one requiested for.
-->
<summer name="yaw trim error">
<input>fcs/rudder-cmd-norm</input>
<input>fcs/yaw-rate-norm</input>
<input>fcs/yaw-load-norm</input>
</summer>
<!--
- Make sure the PID controller is only active when the aircraft
- has gained some speed. This will prevent bad behaviour when the
- aircraft has been parked for a while.
-->
<switch name="rudder pid trigger">
<default value="1"/>
<test value="0">
velocities/vc-kts lt 10.0
</test>
</switch>
<pid name="yaw load pid">
<trigger>fcs/rudder-pid-trigger</trigger>
<input>fcs/yaw-trim-error</input>
<kp> 0.105500 </kp>
<ki> 0.000010 </ki>
<kd> 0.00005 </kd>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
<output>fcs/yaw-load-pid</output>
</pid>
<summer name="yaw scheduler">
<input>fcs/rudder-cmd-norm</input>
<input>fcs/yaw-trim-cmd-norm</input>
<input>fcs/yaw-load-pid</input>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
</summer>
<kinematic name="rudder position">
<input>fcs/yaw-scheduler</input>
<traverse>
<setting>
<position>-1</position>
<time>0.35</time>
</setting>
<setting>
<position>1</position>
<time>0.35</time>
</setting>
</traverse>
<output>fcs/rudder-position</output>
</kinematic>
<lag_filter name="rudder pos norm">
<input>-fcs/rudder-position</input>
<c1>10</c1>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
<output>fcs/rudder-pos-norm</output>
</lag_filter>
<aerosurface_scale name="Rudder Control">
<input>-fcs/rudder-pos-norm</input>
<range>
<min>-0.524</min>
<max>0.524</max>
</range>
<output>fcs/rudder-pos-rad</output>
</aerosurface_scale>
<lag_filter name="rudder-cmd-norm-filtered">
<input>fcs/rudder-cmd-norm</input>
<c1>2</c1>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
<output>fcs/rudder-cmd-norm-filtered</output>
</lag_filter>
</channel>
<channel name="Leading Edge Flap">
<switch name="lef pos rad">
<default value="0.0"/>
<test logic="AND" value="-0.0349">
fcs/gear-wow eq 1
gear/gear-pos-norm gt 0
</test>
<test logic="AND" value="0.436">
gear/gear-pos-norm eq 0
aero/alpha-rad gt 0.2618
</test>
<test logic="AND" value="0.262">
fcs/gear-wow eq 0
aero/alpha-rad gt 0.0873
</test>
<test logic="AND" value="-0.0349">
velocities/mach gt 0.9
</test>
</switch>
<pure_gain name="slat pos norm">
<input>fcs/lef-pos-rad</input>
<gain>2.293578</gain>
</pure_gain>
<kinematic name="lef control">
<input>fcs/slat-pos-norm</input>
<traverse>
<setting>
<position>-1.0</position>
<time>3.0</time>
</setting>
<setting>
<position>1.0</position>
<time>3.0</time>
</setting>
</traverse>
</kinematic>
<aerosurface_scale name="lef pos deg">
<input>fcs/lef-control</input>
<domain>
<min>-1.0</min>
<max>1.0</max>
</domain>
<range>
<min>-25</min>
<max>25</max>
</range>
</aerosurface_scale>
</channel>
<channel name="Throttle">
<pure_gain name="throttle-pos-norm">
<input>fcs/throttle-cmd-norm</input>
<gain>1</gain>
<output>fcs/throttle-pos-norm</output>
</pure_gain>
<pure_gain name="throttle-pos-norm[1]">
<input>fcs/throttle1</input>
<gain>1</gain>
<output>fcs/throttle-pos-norm[1]</output>
</pure_gain>
<pure_gain name="throttle-pos-norm[2]">
<input>fcs/throttle2</input>
<gain>1</gain>
<output>fcs/throttle-pos-norm[2]</output>
</pure_gain>
<pure_gain name="throttle-pos-norm[3]">
<input>fcs/throttle3</input>
<gain>1</gain>
<output>fcs/throttle-pos-norm[3]</output>
</pure_gain>
</channel>
<channel name="Speedbrake">
<!--
- To prevent deep stall the Flight Computer commands speedbrake
- deflection at high angle of attack (alpha) and low speeds. This
- will provide just enough pitch down moment to keep the aircraft
- under control.
-->
<switch name="speedbrake alpha limiter">
<default value="0"/>
<test logic="AND" value="1">
aero/alpha-deg ge 53
velocities/v-fps le 18
fcs/fbw-override == 0
</test>
</switch>
<switch name="speedbrake initiate">
<default value="0"/>
<test logic="OR" value="1">
fcs/speedbrake-alpha-limiter eq 1
fcs/speedbrake-cmd-norm eq 1
</test>
</switch>
<!--
- Speedbrake deflection is limited to 43 degrees (instead of 60
- degrees) when the gear is extended to prevent physical
- speedbrake damage on touchdown.
-->
<scheduled_gain name="speedbrake scheduler">
<input>fcs/speedbrake-initiate</input>
<table>
<independentVar>gear/gear-cmd-norm</independentVar>
<tableData>
0 1.0
1 0.71667
</tableData>
</table>
<output>fcs/steer-pos-deg</output>
</scheduled_gain>
<kinematic name="Speedbrake Control">
<input>fcs/speedbrake-scheduler</input>
<traverse>
<setting>
<position>0</position>
<time>0</time>
</setting>
<setting>
<position>60</position>
<time>1</time>
</setting>
</traverse>
<output>fcs/speedbrake-pos-deg</output>
</kinematic>
<aerosurface_scale name="Speedbrake Pos Norm">
<input>fcs/speedbrake-control</input>
<domain>
<min>0</min>
<max>60</max>
</domain>
<range>
<min>0</min>
<max>1</max>
</range>
<output>fcs/speedbrake-pos-norm</output>
</aerosurface_scale>
</channel>
<channel name="Canopy">
<kinematic name="Canopy Control">
<input>fcs/canopy-engage</input>
<traverse>
<setting>
<position>0</position>
<time>0</time>
</setting>
<setting>
<position>1</position>
<time>10</time>
</setting>
</traverse>
<output>fcs/canopy-pos-norm</output>
</kinematic>
</channel>
<channel name="Landing Gear">
<switch name="gear-wow">
<default value="0"/>
<test logic="AND" value="1">
gear/unit[1]/WOW eq 1
gear/unit[2]/WOW eq 1
</test>
</switch>
<kinematic name="Gear Control">
<input>gear/gear-cmd-norm</input>
<traverse>
<setting>
<position>0</position>
<time>0</time>
</setting>
<setting>
<position>1</position>
<time>5</time>
</setting>
</traverse>
<output>gear/gear-pos-norm</output>
</kinematic>
<scheduled_gain name="Scheduled Steer Pos Deg">
<input>fcs/steer-cmd-norm</input>
<table>
<independentVar>velocities/vg-fps</independentVar>
<tableData>
10.0 80.0
50.0 15.0
150.0 2.0
</tableData>
</table>
<output>fcs/steer-pos-deg</output>
</scheduled_gain>
</channel>
</flight_control>
<aerodynamics>
<axis name="LIFT">
<function name="aero/coefficient/CLalpha">
<description>Lift_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<tableData>
-3.14 -0.300
-2.60 -0.800
-2.08 -0.800
-1.57 0.000
-1.00 -2.000
-0.20 -1.280
0.00 0.078
0.09 0.581
0.17 1.013
0.26 1.279
0.52 1.800
0.61 1.800
1.00 1.400
1.20 0.200
1.57 0.000
2.08 0.800
2.60 0.800
3.14 -0.300
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/dCLflap">
<description>Delta_Lift_due_to_flaps</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/tef-pos-rad</property>
<value> 0.66 </value>
</product>
</function>
<function name="aero/coefficient/dCLsb">
<description>Delta_Lift_due_to_speedbrake</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/speedbrake-pos-norm</property>
<value>0</value>
</product>
</function>
<function name="aero/coefficient/CLde">
<description>Lift_due_to_Elevator_Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/elevator-pos-rad</property>
<value>0.2</value>
</product>
</function>
</axis>
<axis name="DRAG">
<function name="aero/coefficient/CD0">
<description>Drag_at_zero_lift</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<tableData>
-3.14 0.300
-1.57 1.500
-0.26 0.240
-0.1750 0.1560
-0.0870 0.0410
0.0000 0.0210
0.0870 0.0400
0.1750 0.0960
0.2620 0.1820
0.3490 0.3470
0.4360 0.5770
0.5240 0.8260
0.6110 1.0840
0.6980 1.3260
0.7850 1.4780
1.57 1.500
3.14 0.300
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDi">
<description>Induced_drag</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/cl-squared</property>
<value>0.12</value>
</product>
</function>
<function name="aero/coefficient/CDmach">
<description>Drag_due_to_mach</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0.00 0.000
0.81 0.000
1.10 0.023
1.80 0.015
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDflap">
<description>Drag_due_to_flaps</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/tef-pos-rad</property>
<value> 0.15219 </value>
</product>
</function>
<function name="aero/coefficient/CDgear">
<description>Drag_due_to_gear</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>gear/gear-pos-norm</property>
<value>0.02</value>
</product>
</function>
<function name="aero/coefficient/CDsb">
<description>Drag_due_to_speedbrakes</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/speedbrake-pos-norm</property>
<value>0.021</value>
</product>
</function>
<function name="aero/coefficient/CDft">
<description>Drag_due_to_fan_trap</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">fcs/mixture-pos-norm</independentVar>
<tableData>
0 1
1 0
</tableData>
</table>
<value>0.031</value>
</product>
</function>
<function name="aero/coefficient/CDbeta">
<description>Drag_due_to_sideslip</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">aero/beta-rad</independentVar>
<tableData>
-1.57 1.230
-0.26 0.050
0.00 0.000
0.26 0.050
1.57 1.230
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDde">
<description>Drag_due_to_Elevator_Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<abs><property>fcs/elevator-pos-norm</property></abs>
<value>0.04</value>
</product>
</function>
</axis>
<axis name="SIDE">
<function name="aero/coefficient/CYb">
<description>Side_force_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/beta-rad</property>
<value>-1</value>
</product>
</function>
</axis>
<axis name="ROLL">
<function name="aero/coefficient/Clb">
<description>Roll_moment_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/beta-rad</property>
<value>-0.01</value>
</product>
</function>
<function name="aero/coefficient/Clp">
<description>Roll_moment_due_to_roll_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/p-aero-rad_sec</property>
<value>-0.4</value>
</product>
</function>
<function name="aero/coefficient/Clr">
<description>Roll_moment_due_to_yaw_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/r-aero-rad_sec</property>
<value>0.15</value>
</product>
</function>
<function name="aero/coefficient/Clda">
<description>Roll_moment_due_to_aileron</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/left-aileron-pos-rad</property>
<value>1.5</value> <!-- to match real datas -->
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0.0 0.110
1.0 0.067
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cldr">
<description>Roll_moment_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/rudder-pos-rad</property>
<value>0.01</value>
</product>
</function>
</axis>
<axis name="PITCH">
<function name="aero/coefficient/Cmalpha">
<description>Pitch_moment_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/alpha-rad</property>
<value>-0.3</value>
</product>
</function>
<function name="aero/coefficient/Cmde">
<description>Pitch_moment_due_to_elevator</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>fcs/elevator-pos-rad</property>
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0.0 -0.800
2.0 -0.200
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cmq">
<description>Pitch_moment_due_to_pitch_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/ci2vel</property>
<property>velocities/q-aero-rad_sec</property>
<value>-18</value>
</product>
</function>
<function name="aero/coefficient/Cmadot">
<description>Pitch_moment_due_to_alpha_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/ci2vel</property>
<property>aero/alphadot-rad_sec</property>
<value>-9</value>
</product>
</function>
</axis>
<axis name="YAW">
<function name="aero/coefficient/Cnb">
<description>Yaw_moment_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/beta-rad</property>
<value>0.12</value>
</product>
</function>
<function name="aero/coefficient/Cnr">
<description>Yaw_moment_due_to_yaw_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/r-aero-rad_sec</property>
<value>-0.15</value>
</product>
</function>
<function name="aero/coefficient/Cndr">
<description>Yaw_moment_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/rudder-pos-rad</property>
<value>-0.1</value>
</product>
</function>
<function name="aero/coefficient/Cnda">
<description>Adverse_yaw</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/left-aileron-pos-rad</property>
<value>0</value>
</product>
</function>
</axis>
</aerodynamics>
<system file="pushback"/>
<external_reactions>
<force name="pushback" frame="BODY">
<location unit="IN">
<x> -2.98081 </x>
<y> 0.0 </y>
<z> -1.9683 </z>
</location>
<direction>
<x>1</x>
<y>0</y>
<z>0</z>
</direction>
</force>
</external_reactions>
<autopilot file="autopilot"/>
</fdm_config> |
Beta Was this translation helpful? Give feedback.
-
|
Can you share the scripts.xml you use when flying the f35B? thanks |
Beta Was this translation helpful? Give feedback.
-
|
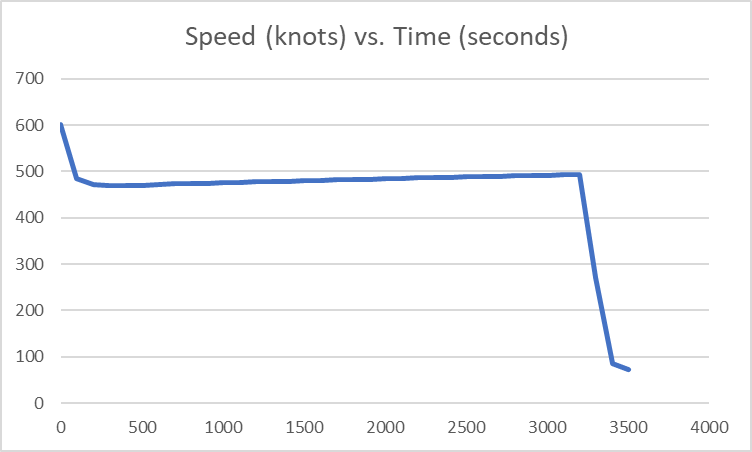
Hmm, so it maintains roughly 500kt for round about 50min. Have you tried to investigate what happens around the 50min mark? Maybe it ran out of fuel? Plot things like thrust, drag, alpha etc. and see what happens to them around the 50min mark. |
Beta Was this translation helpful? Give feedback.
-
|
Ok I will see how to go about grabbing those values but another problem was I asked it to fly at 600 knots but it never could reach and maintain that speed. What settings in the autopilot should I change to get it to the speed I specified? Thank you! |
Beta Was this translation helpful? Give feedback.
-
|
Well physics comes into play, the amount of thrust available at that altitude and the amount of drag. The autopilot can't overcome the physics. So you'll need to confirm how much thrust is available, is the autopilot making use of all of the thrust, what is the weight, drag etc.? |
Beta Was this translation helpful? Give feedback.
-
|
@dpculp I changed to hold air speed like you suggested but didn't see the difference. I changed the altitude to 15000 feet and the airplane is flying a little faster. Air speed is 100 knots slower than ground speed. Is that normal? @seanmcleod it's for a realistic flight simulation for collection platforms. Unfortunately I only have a short period of time to investigate this before moving on to a different approach (that doesn't involve me trying to learn all these flying business in a few days). Here's the the result flying at 1500 feet: <style> </style>
|
Beta Was this translation helpful? Give feedback.
-
This is where some basic aerodynamics/flight dynamics knowledge would be useful 😉 i.e. to understand the difference between IAS, TAS and ground speed. So it looks like your throttle is maxed out. And the alpha value looks reasonable, i.e. you haven't ended up with say 10 degrees of alpha resulting in some massive induced drag. So you need to confirm the thrust output and see whether it makes sense given the engine specs, i.e. that there isn't some error where the thrust for full throttle hasn't been limited to less than what it should be. If it isn't then double-check the drag, e.g. checking gear position which I think you did earlier, maybe the flaps are extended etc. If you've removed the lateral auto-pilot why the big fluctuations in roll angle? Actually your roll column is confusing, is this the roll angle as suggested by the first line in the column, or roll rate (degs per sec) as implied by the 2nd line?
Collection platforms? If we know the intended use we could also potentially give advice on other options. |
Beta Was this translation helpful? Give feedback.
-
|
Here's a link to an online airspeed/altitude/mach calculator that you'll find useful: https://aerotoolbox.com/airspeed-conversions/ So far so good. As Sean mentioned your throttle is maxed out. This could mean any of:
Just as a sanity check I would try a run at a lower speed, say 400 KTAS (or groundspeed if you prefer using that). This should be well within the F-35B's capabilities, and it should take less than full throttle to hold that speed. -- Dave |
Beta Was this translation helpful? Give feedback.
-
|
I did read a little bit about air speed vs ground speed. It says ground speed is the sum of airspeed and wind speed. Since I'm not using wind (or I thought I didn't) I thought the air speed would somewhat equals ground speed. Yeah I'm the wrong person for this task (Java GUI developer here with absolutely no prior knowledge of all of this fly business. It's quite challenging, have to lookup everything) Actually I ended up not removing the roll and yaw channels because when I removed it couldn't hold the heading (I'm sure I messed up something in there but since I need it in the system anyway so I didn't want to spend time chasing it). Good catch on the roll angle. I was looking at the wrong field (updated the table above to reflect the roll angle (attitude/roll-rad). It looks reasonable I think (phew...one less problem to worry about.).
I'm sorry I'm not allow to say much about it but platforms mean the aircraft models (in this case the aircraft models I'm trying to get working) and collection means collect signals. |
Beta Was this translation helpful? Give feedback.
-
|
@dpculp thank you for the links and suggestions. I will work on that next. |
Beta Was this translation helpful? Give feedback.
-
|
Confirmed at 400 KTAS it's not at full throttle. <style> </style>
Full throttle at this speed <style> </style>
Does this mean it's not using the maximum thrust? Full engine file: |
Beta Was this translation helpful? Give feedback.
-
|
OK, good test. The afterburner is not being activated. I see from the engine configuration file that it's using method 0 in order to activate the afterburner. The three methods of afterburner activation are explained in the FGTurbine header file:
The first two methods won't work with an autothrottle that is trying to hold a speed that requires afterburner. This is because the afterburner selection is all-or-nothing, and that won't work well with the autothrottle. I could go into detail on how to set this up in your aircraft configuration file, but first I'll offer a simpler solution. I'm guessing from your use case that you don't really need detailed models of the various aircraft. They all fly a waypoint course at a high speed, so from an outside viewpoint they all look the same. You only need one model, although you could give different copies of it different names if that's what your use case requires. In this case it would be best to simplify the model. To that end I recommend increasing the "milthrust" in your engine file to 40000 pounds or so (whatever you need). That removes the afterburner from consideration. If you really need to get the afterburner working using augmethod=2, then let me know and I'll talk you through it. -- Dave (EDIT: sorry, the code indentation did not show properly) |
Beta Was this translation helpful? Give feedback.
-
You didn't read enough 😉 The are two air speeds, IAS (Indicated Air Speed) and TAS (True Air Speed), the statement relating ground speed to air speed in terms of the wind applies to TAS.
Yep, exactly the reason I was asking @ha-2022 for more details on his actual project requirements, since we could then potentially make suggestions like this to make things easier, and a lot more quickly/earlier in the thread as well. |
Beta Was this translation helpful? Give feedback.
-
|
We are providing a simulation environment that depends upon realistic speed, motion and maneuverability of the platform (i.e., aircraft model). Our targeted software is now being applied to different platforms, so to ensure correct operation of our software, @dpculp If using afterburner vs. changing "milthrust" will give me the same result as how the F-35B would fly then that works too. I believe max speed for F35-B is ~1040 kts. I guess we don't really need the complicated details of the aircraft model, just the motion, so hopefully I don't need the afterburner? But if I need the afterburner to properly simulate the motion of the F-35B then I would be forever grateful if you could step me through it. Thank you all so much for your help so far! |
Beta Was this translation helpful? Give feedback.
-
Definitely won't. A username of @ha-2022 didn't give me any clues, sorry about the assumption.
But that will be with the afterburner engaged, and as you can see from the engine file there is a massive difference in thrust with the afterburner engaged. I think as @dpculp suggested the easiest is to simply bump up the "milthrust" to very close to the "augthrust" value of 43000, that way your speed control PID loop will be able to access the full thrust range without having to worry about switching into/out of afterburner etc. Which will allow you to get closer to the 1040 kts max, although you'll need to understand whether that's IAS or TAS etc. and also remember that it doesn't mean that you can achieve that speed across the full altitude range from sea-level to max altitude etc.
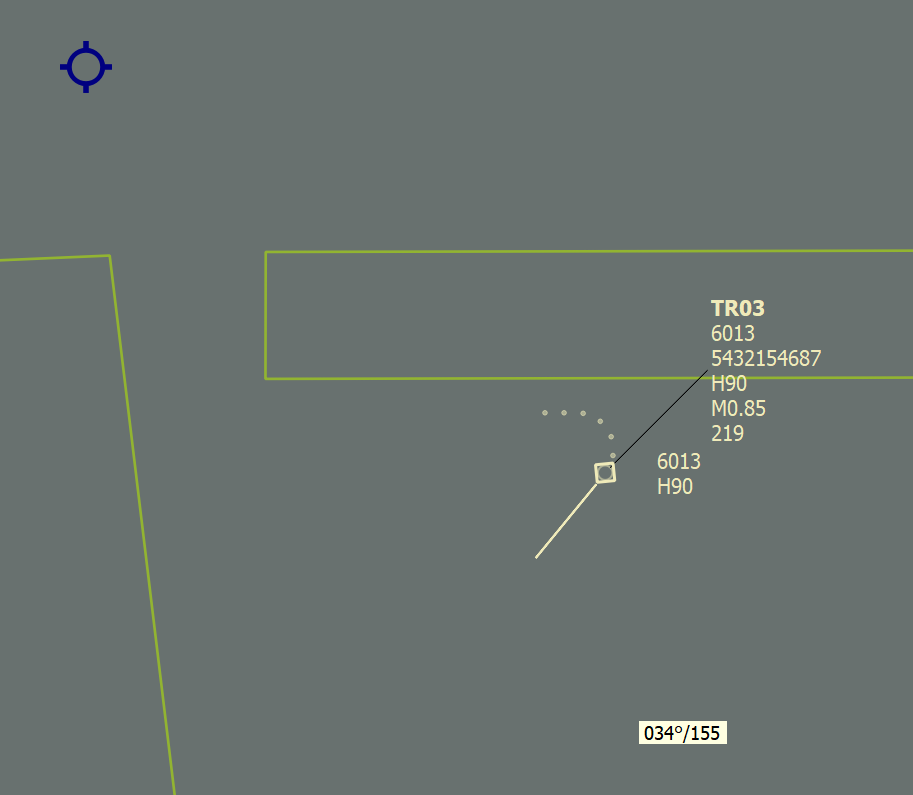
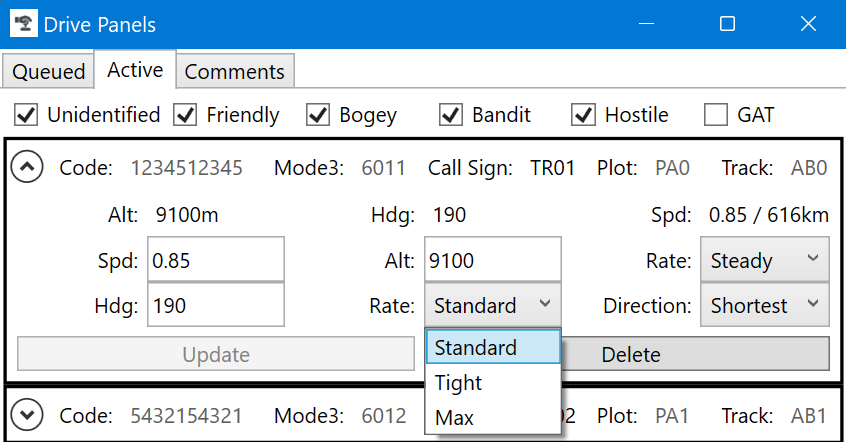
Not sure how realistic "realistic as possible" really needs to be ;-) In other words whether you need a full flight simulation engine like JSBSim or whether you can make use of a fairly simple trajectory calculation approach. I mention this because one of the projects I worked on a while ago was a GCI (Ground Control Intercept) Radar simulator for training GCI radar operators. Where we needed to generate 'plausible/realistic' trajectories for various aircraft to show up on the radar display, e.g.
These trajectories could be scripted by issuing auto-pilot commands, e.g. change speed to X, change heading to Y, climb/descend to altitude Z etc. at particular times into the lesson. Time:0:10 AP:R1 Alt:9100 Speed:0.85
Time:2:00 AP:R1 Hdg:190Plus the instructors could manually issue auto-pilot commands manually at any stage.
Where on a per-aircraft type the rates for turning could be selected from 'Standard', 'Tight', 'Max' which were then mapped to a particular g to be used, so fighter type A might have g values of 2, 4, 6 for the 3 options and an airliner type would have say 1.2, 1.3, 1.5. similar concept for climb/descent performance. The trajectory calculations were then coded up in a couple of hundred lines of python code, taking into account a standard atmosphere so that instructors could specify IAS, Mach at specific altitudes and those would be converted to TAS to then be used in the arc calculations based on the g specified etc. to generate realistic trajectories. So for this specific GCI Radar Sim project a full-blown JSBSim instance to model each aircraft would've been overkill. |
Beta Was this translation helpful? Give feedback.
-
|
We do need a full flight simulation for our purpose (realtime) but what you're doing here with the trajectory is pretty cool. Why don't you take my job and I can get back to writing GUI where I'm good at 😃
|
Beta Was this translation helpful? Give feedback.
-
|
Did the person in your company who used to work on this part in terms of JSBSim and auto-pilots etc. leave, and that's why you've been thrown in at the deep end? |
Beta Was this translation helpful? Give feedback.
-
|
Yes but he didn't know much about the aircraft model and autopilot either. He got the files from somewhere. Didn't get much help from him when he was still here. |
Beta Was this translation helpful? Give feedback.
-
|
Autothrottle and afterburner don't play nice together because there is a discontinuity in the thrust curve when the afterburner is activated. If you happen to pick a speed target that requires the throttle to be near the afterburner activation position, then you'll get poor results. This is a real effect, not just a modeling problem. In fact, it's possible (I haven't tested it) that the model will fail to initialize at the selected speed because the discontinuity in the thrust curve will overwhelm the trim algorithm. Relevant story from the old days (because I'm old): When air-refueling a heavy loaded fighter, for example an F-4, as the fighter gains weight it may eventually get to a weight that requires some afterburner. The thrust discontinuity makes it very difficult to maintain position behind the tanker. The common solution is to pull one throttle back a bit and push the other throttle above the afterburner detent so that it can stay above the detent. This solves the discontinuity problem. Back to 2022, I recommend bypassing the afterburner in your model and just increase the "milthrust" value to give you the thrust you need. -- Dave |
Beta Was this translation helpful? Give feedback.
-
|
My dev machine still down. Dang it! I really want to try this out. |
Beta Was this translation helpful? Give feedback.
-
Although you've now got a yaw moment to deal with 😉 |
Beta Was this translation helpful? Give feedback.
-
|
I followed your suggestion and up the "milthrust" to
But when I changed the speed to 650 kts weird things start to happen. Notice the speed is slower. <style> </style>
So I up the "milthrust" to
|
Beta Was this translation helpful? Give feedback.
-
|
At this point it's hard to guess where to look next. The wierdness could be coming from the airplane model, or it could be in the initialization, or it could be in the autopilot system. My advice at this point is a bit radical. First I would switch to a model that I personally know is SIMPLE and flies well. I have plenty at my own online hangar (http://daveshangar.org/). The F-106 is single-engined and simple, with a basic flight control system. Let me know if you'd like help in switching to this model. Then I'd edit the engine file to increase milthrust to 30000 pounds. Second I would do a run without autopilot. A ten second run is plenty long enough. Pay particular attention to the console output to ensure the in-flight trim was successful. Do the initial conditions match what you wanted? I'm still getting a hinkey feeling about setting ground speed as an initial condition. Can we target true airspeed instead (velocities/vtrue-kts), or even better, calibrated airspeed (velocities/vc-kts)? If all looks good here then the problem is in the autopilot. -- Dave |
Beta Was this translation helpful? Give feedback.
-
|
I removed the autopilot like you suggested. //Load initial conditions
fdmExec.GetIC()->SetAltitudeASLFtIC(15000);
fdmExec.GetIC()->SetGeodLatitudeRadIC(0.52);
fdmExec.GetIC()->SetLongitudeRadIC(-1.64);
fdmExec.GetIC()->SetUBodyFpsIC(1097); //is this the right way to set the initial speed?
fdmExec.GetIC()->SetPsiDegIC(90);
while (true)
{
setGearPosNorm(false);
fdmExec.Run();
if (getCurrentFuelLbs() < 19000)
setRefuel(true);
else if (getCurrentFuelLbs() > 20000)
setRefuel(false);
sim_nsleep(dt*1e+9);
}This looks good right? So more than likely the autopilot is the problem? so how do I go about fixing it 😅? <style> </style>
|
Beta Was this translation helpful? Give feedback.
-
I'd second that, often I see users wanting to use something like the F-22, F-16 etc. without realizing the extra complication there is in terms of an existing FBW based FCS, which may complicate things when they want to control the aircraft, e.g. to follow a trajectory etc. For example in the F-35 example above it looks like someone has cut out a portion of the F-16's g-command FBW law and inserted it. So how sure are you of the interaction of the auto-pilot you're busy trying to implement with the existing FBW FCS? For example are some of the AoA perturbations coming from the g-command law? For something that is fairly simple and has the sort of rough performance you're looking for, although you may still want to remove the afterburner complication, is the existing F-15 model in the JSBSim repo since it doesn't come with an existing FBW FCS. |
Beta Was this translation helpful? Give feedback.
-
|
Hİ @theorynice, I know it's been a long time since the last comment, but I'll try my luck anyway. I'm trying to fly at constant altitude with the f15 autopilot you shared, but something is going wrong. Can you share an example script? |
Beta Was this translation helpful? Give feedback.
-
|
Hi, you can try the script c3104.xml in the directory scripts. |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for your reply. I've already tried. Although I set altitude to 1000 feet, the plane oscillates between 15000 - 40000 feet. |
Beta Was this translation helpful? Give feedback.
-
|
@theorynice Regards |
Beta Was this translation helpful? Give feedback.
-
|
Hello everyone, I am newbie trying to understand how jsbsim autopilot system works. I have successfully flied the C310 plane with the script available in the JSBSim, I am trying to do the same with f15 and same script. When I try to fly the plane to the points I describe the plane doesn't follow the coordinates of any point. I've used the f15 files shared here, and here is my script that works with c310 but not with f15: <?xml version="1.0" encoding="UTF-8"?>
<?xml-stylesheet type="text/xsl" ?>
<runscript name="C310-01A takeoff run">
<use aircraft="f15" initialize="../../test/init"/>
<run start="0.0" end="1800" dt="0.01">
<event name="Start engine">
<condition>simulation/sim-time-sec ge 0.25</condition>
<set name="fcs/mixture-cmd-norm[0]" value="1"/>
<set name="fcs/mixture-cmd-norm[1]" value="1"/>
<set name="fcs/advance-cmd-norm[0]" value="1.0"/>
<set name="fcs/advance-cmd-norm[1]" value="1.0"/>
<set name="fcs/throttle-cmd-norm[0]" value="1.0"/>
<set name="fcs/throttle-cmd-norm[1]" value="1.0"/>
<set name="propulsion/starter_cmd" value="1"/>
<set name="ap/attitude_hold" value="0"/>
<set name="guidance/target_wp_latitude_rad" value="0.7153061271745532"/>
<set name="guidance/target_wp_longitude_rad" value="0.5027776995410569"/>
<set name="ap/heading_setpoint" value="0"/>
<set name="ap/heading_hold" value="1"/>
<set name="ap/active-waypoint" value="1"/>
</event>
<event name="Raise landing gear">
<condition>position/h-agl-ft ge 40</condition>
<set name="gear/gear-cmd-norm" value="0"/>
</event>
<event name="Head to first waypoint">
<condition>position/h-agl-ft ge 900</condition>
<set name="ap/active-waypoint" value="1"/>
<set name="ap/altitude_setpoint" value="4000.52292046198406" />
<set name="ap/altitude_hold" value="1"/>
<notify/>
</event>
<event name="Set waypoint 4">
<condition>
guidance/wp-distance lt 2500
ap/active-waypoint eq 3
</condition>
<set name="guidance/target_wp_latitude_rad" value="0.7119963305506742"/>
<set name="guidance/target_wp_longitude_rad" value="0.5089349211346755"/>
<set name="ap/altitude_setpoint" value="4000.52292046198406" />
<set name="ap/active-waypoint" value="4"/>
<notify/>
</event>
<event name="Set waypoint 3">
<condition>
guidance/wp-distance lt 2500
ap/active-waypoint eq 2
</condition>
<set name="guidance/target_wp_latitude_rad" value="0.7124925864880752"/>
<set name="guidance/target_wp_longitude_rad" value="0.5070509900512948"/>
<set name="ap/altitude_setpoint" value="4000.52292046198406" />
<set name="ap/altitude_hold" value="1"/>
<set name="ap/active-waypoint" value="3"/>
<notify/>
</event>
<event name="Set waypoint 2">
<condition>
guidance/wp-distance lt 2500
ap/active-waypoint eq 1
</condition>
<set name="guidance/target_wp_latitude_rad" value="0.7138967395660176"/>
<set name="guidance/target_wp_longitude_rad" value="0.5232904103935886"/>
<set name="ap/altitude_setpoint" value="8000.52292046198406" />
<set name="ap/altitude_hold" value="1"/>
<set name="ap/active-waypoint" value="2"/>
<notify/>
</event>
<event name="Terminate">
<condition>
guidance/wp-distance lt 100
ap/active-waypoint eq 4
</condition>
<set name="simulation/terminate" value="1"/>
</event>
</run>
</runscript>I've only added <set name="ap/heading-setpoint-select" value="1"/>
<set name="propulsion/magneto_cmd" value="3"/>because JSBSim threw fatal error that they didn't exist in the autopilot file. |
Beta Was this translation helpful? Give feedback.
-
|
Have you included the autopilot system in your F-15 as per the very first post in this dicussion? |
Beta Was this translation helpful? Give feedback.
-
|
Hi, thank you for responding. Yes, the f15 file is pretty much the same with the addition of code that is provided at the first post: <?xml` version="1.0"?>
<?xml-stylesheet type="text/xsl" href="http://jsbsim.sourceforge.net/JSBSim.xsl"?>
<fdm_config name="f15" version="2.0" release="BETA"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation="http://jsbsim.sourceforge.net/JSBSim.xsd">
<fileheader>
<author> Erik Hofman </author>
<filecreationdate> 2005-01-01 </filecreationdate>
<version> $Revision: 1.31 $ </version>
<description> McDonnell Douglas F-15 Eagle </description>
<note>
This model was created using publicly available data, publicly available
technical reports, textbooks, and guesses. It contains no proprietary or
restricted data. If this model has been validated at all, it would be
only to the extent that it seems to "fly right", and that it possibly
complies with published, publicly known, performance data (maximum speed,
endurance, etc.). Thus, this model is meant for educational and entertainment
purposes only.
This simulation model is not endorsed by the manufacturer. This model is not
to be sold.
</note>
</fileheader>
<metrics>
<wingarea unit="FT2"> 608 </wingarea>
<wingspan unit="FT"> 42.83 </wingspan>
<chord unit="FT"> 15.95 </chord>
<htailarea unit="FT2"> 45.01 </htailarea>
<htailarm unit="FT"> 20 </htailarm>
<vtailarea unit="FT2"> 46.96 </vtailarea>
<vtailarm unit="FT"> 0 </vtailarm>
<location name="AERORP" unit="IN">
<x> -234.15 </x>
<y> 0 </y>
<z> 0 </z>
</location>
<location name="EYEPOINT" unit="IN">
<x> -398.45 </x>
<y> 0 </y>
<z> 37 </z>
</location>
<location name="VRP" unit="IN">
<x> -237.25 </x>
<y> 0 </y>
<z> 4.58 </z>
</location>
</metrics>
<mass_balance negated_crossproduct_inertia="true">
<ixx unit="SLUG*FT2"> 28700 </ixx>
<iyy unit="SLUG*FT2"> 165100 </iyy>
<izz unit="SLUG*FT2"> 187900 </izz>
<ixz unit="SLUG*FT2"> 520 </ixz>
<emptywt unit="LBS"> 28000 </emptywt>
<location name="CG" unit="IN">
<x> -236.39 </x>
<y> 0 </y>
<z> 4.5 </z>
</location>
<pointmass name="Pilot">
<weight unit="LBS"> 230 </weight>
<location name="POINTMASS" unit="IN">
<x> -398.45 </x>
<y> 0 </y>
<z> 20 </z>
</location>
</pointmass>
</mass_balance>
<ground_reactions>
<contact type="BOGEY" name="NOSE">
<location unit="IN">
<x> -393.2 </x>
<y> 0 </y>
<z> -89.2 </z>
</location>
<static_friction> 0.8 </static_friction>
<dynamic_friction> 0.5 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="LBS/FT"> 12200 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 5000 </damping_coeff>
<max_steer unit="DEG"> 5 </max_steer>
<brake_group> NONE </brake_group>
<retractable>1</retractable>
</contact>
<contact type="BOGEY" name="MLG_LEFT">
<location unit="IN">
<x> -187 </x>
<y> -54 </y>
<z> -85.4 </z>
</location>
<static_friction> 0.8 </static_friction>
<dynamic_friction> 0.5 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="LBS/FT"> 22704 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 9000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> LEFT </brake_group>
<retractable>1</retractable>
</contact>
<contact type="BOGEY" name="MLG_RIGHT">
<location unit="IN">
<x> -187 </x>
<y> 54 </y>
<z> -85.4 </z>
</location>
<static_friction> 0.8 </static_friction>
<dynamic_friction> 0.5 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="LBS/FT"> 22704 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 9000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> RIGHT </brake_group>
<retractable>1</retractable>
</contact>
<contact type="BOGEY" name="WT_LEFT">
<location unit="IN">
<x> -92.2 </x>
<y> -257 </y>
<z> 10 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<rolling_friction> 0.2 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> NONE </brake_group>
<retractable>0</retractable>
</contact>
<contact type="BOGEY" name="WT_RIGHT">
<location unit="IN">
<x> -92.2 </x>
<y> 257 </y>
<z> 10 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<rolling_friction> 0.2 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> NONE </brake_group>
<retractable>0</retractable>
</contact>
<contact type="BOGEY" name="VT_LEFT">
<location unit="IN">
<x> 47.4 </x>
<y> -69.7 </y>
<z> 133.8 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<rolling_friction> 0.2 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> NONE </brake_group>
<retractable>0</retractable>
</contact>
<contact type="BOGEY" name="VT_RIGHT">
<location unit="IN">
<x> 47.4 </x>
<y> 69.7 </y>
<z> 133.8 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<rolling_friction> 0.2 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> NONE </brake_group>
<retractable>0</retractable>
</contact>
<contact type="BOGEY" name="RADOME">
<location unit="IN">
<x> -648.7 </x>
<y> 0 </y>
<z> -17 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<rolling_friction> 0.2 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> NONE </brake_group>
<retractable>0</retractable>
</contact>
<contact type="BOGEY" name="BELLY">
<location unit="IN">
<x> -187 </x>
<y> 0 </y>
<z> -37 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<rolling_friction> 0.2 </rolling_friction>
<spring_coeff unit="LBS/FT"> 10000 </spring_coeff>
<damping_coeff unit="LBS/FT/SEC"> 2000 </damping_coeff>
<max_steer unit="DEG"> 0.0 </max_steer>
<brake_group> NONE </brake_group>
<retractable>0</retractable>
</contact>
</ground_reactions>
<propulsion>
<engine file="F100-PW-229">
<feed>0</feed>
<feed>1</feed>
<thruster file="direct">
<location unit="IN">
<x> 50 </x>
<y> -25.5 </y>
<z> 0 </z>
</location>
<orient unit="DEG">
<roll> 0.0 </roll>
<pitch> 0.0 </pitch>
<yaw> 0.0 </yaw>
</orient>
</thruster>
</engine>
<engine file="F100-PW-229">
<feed>0</feed>
<feed>1</feed>
<thruster file="direct">
<location unit="IN">
<x> 50 </x>
<y> 25.5 </y>
<z> 0 </z>
</location>
<orient unit="DEG">
<roll> 0.0 </roll>
<pitch> 0.0 </pitch>
<yaw> 0.0 </yaw>
</orient>
</thruster>
</engine>
<tank type="FUEL"> <!-- Tank number 0 -->
<location unit="IN">
<x> -236.39 </x>
<y> 0 </y>
<z> 4.5 </z>
</location>
<capacity unit="LBS"> 6561.5 </capacity>
<contents unit="LBS"> 2500 </contents>
</tank>
<tank type="FUEL"> <!-- Tank number 1 -->
<location unit="IN">
<x> -236.39 </x>
<y> 0 </y>
<z> 4.5 </z>
</location>
<capacity unit="LBS"> 6561.5 </capacity>
<contents unit="LBS"> 2500 </contents>
</tank>
</propulsion>
<system file="GNCUtilities"/>
<system file="Autopilot">
<property value="0.523"> guidance/roll-angle-limit </property>
<property value="0.174"> guidance/roll-rate-limit </property>
</system>
<autopilot file="f15ap"/>
<flight_control name="FCS: f15">
<channel name="Pitch">
<summer name="Pitch Trim Sum">
<input>ap/elevator_cmd</input>
<input>fcs/elevator-cmd-norm</input>
<input>fcs/pitch-trim-cmd-norm</input>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
</summer>
<kinematic name="elevator position">
<input>fcs/pitch-trim-sum</input>
<traverse>
<setting>
<position>-1</position>
<time>0.6</time>
</setting>
<setting>
<position>1</position>
<time>0.6</time>
</setting>
</traverse>
<output>fcs/elevator-pos-norm</output>
</kinematic>
<aerosurface_scale name="elevator position">
<input>fcs/elevator-pos-norm</input>
<gain>0.01745</gain>
<domain>
<min>-1</min>
<max>1</max>
</domain>
<range>
<min>-26</min>
<max>15</max>
</range>
<output>fcs/elevator-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Roll">
<summer name="Roll Trim Sum">
<input>ap/roll-cmd-norm-output</input>
<input>ap/aileron_cmd</input>
<input>fcs/aileron-cmd-norm</input>
<input>fcs/roll-trim-cmd-norm</input>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
</summer>
<kinematic name="aileron pos norm">
<input>fcs/roll-trim-sum</input>
<traverse>
<setting>
<position>-1</position>
<time>0.3</time>
</setting>
<setting>
<position>1</position>
<time>0.3</time>
</setting>
</traverse>
<output>fcs/left-aileron-pos-norm</output>
</kinematic>
<aerosurface_scale name="Left Aileron Control">
<input>fcs/aileron-pos-norm</input>
<gain>0.01745</gain>
<range>
<min>-20</min>
<max>20</max>
</range>
<output>fcs/left-aileron-pos-rad</output>
</aerosurface_scale>
<aerosurface_scale name="Right Aileron Control">
<input>fcs/aileron-pos-norm</input>
<gain>-0.01745</gain>
<range>
<min>-20</min>
<max>20</max>
</range>
<output>fcs/right-aileron-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Yaw">
<pure_gain name="Yaw Damper Gain">
<input>velocities/r-rad_sec</input>
<gain>-0.001745</gain>
</pure_gain>
<summer name="Yaw Trim Sum">
<input>fcs/rudder-cmd-norm</input>
<input>fcs/yaw-trim-cmd-norm</input>
<input>fcs/yaw-damper-gain</input>
<clipto>
<min>-1</min>
<max>1</max>
</clipto>
</summer>
<kinematic name="rudder position">
<input>fcs/yaw-trim-sum</input>
<traverse>
<setting>
<position>-1</position>
<time>0.4</time>
</setting>
<setting>
<position>1</position>
<time>0.4</time>
</setting>
</traverse>
<output>fcs/rudder-pos-norm</output>
</kinematic>
<aerosurface_scale name="Rudder Control">
<input>fcs/rudder-pos-norm</input>
<gain>0.01745</gain>
<range>
<min>-30</min>
<max>30</max>
</range>
<output>fcs/rudder-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Landing Gear">
<kinematic name="Gear Control">
<input>gear/gear-cmd-norm</input>
<traverse>
<setting>
<position>0</position>
<time>0</time>
</setting>
<setting>
<position>1</position>
<time>5</time>
</setting>
</traverse>
<output>gear/gear-pos-norm</output>
</kinematic>
</channel>
<channel name="Speedbrake">
<kinematic name="Speedbrake Control">
<input>fcs/speedbrake-cmd-norm</input>
<traverse>
<setting>
<position>0</position>
<time>0</time>
</setting>
<setting>
<position>1</position>
<time>2</time>
</setting>
</traverse>
<output>fcs/speedbrake-pos-norm</output>
</kinematic>
</channel>
</flight_control>
<aerodynamics>
<function name="aero/function/kCLge">
<description>Change_in_lift_due_to_ground_effect</description>
<table>
<independentVar>aero/h_b-mac-ft</independentVar>
<tableData>
0.0000 1.0610
0.1000 1.0330
0.1500 1.0310
0.2000 1.0330
0.3000 1.0280
0.4000 1.0110
0.5000 1.0090
0.6000 1.0050
0.7000 1.0020
0.8000 1.0000
0.9000 1.0000
1.0000 1.0000
1.1000 1.0000
</tableData>
</table>
</function>
<function name="aero/function/kCDge">
<description>Change_in_drag_due_to_ground_effect</description>
<table>
<independentVar>aero/h_b-mac-ft</independentVar>
<tableData>
0.0000 0.8100
0.1000 0.9900
0.1500 0.9500
0.2000 0.9800
0.3000 0.9900
0.4000 1.0000
0.5000 1.0400
0.6000 1.0100
0.7000 0.9900
0.8000 1.0100
0.9000 1.0000
1.0000 1.0000
1.1000 1.0000
</tableData>
</table>
</function>
<function name="aero/function/kCmge">
<description>Change_in_pitch_due_to_ground_effect</description>
<table>
<independentVar>aero/h_b-mac-ft</independentVar>
<tableData>
0.0000 0.9920
0.1000 0.9960
0.1500 0.9990
0.2000 0.9970
0.3000 1.0000
0.4000 1.0000
0.5000 1.0020
0.6000 1.0010
0.7000 0.9980
0.8000 0.9990
0.9000 1.0000
1.0000 1.0000
1.1000 1.0000
</tableData>
</table>
</function>
<axis name="DRAG">
<function name="aero/coefficient/CDalpha">
<description>Drag_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCDge</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<independentVar lookup="column">velocities/mach</independentVar>
<tableData>
0.5000 1.4000
-0.4190 0.3800 0.0970
-0.2790 0.2200 0.0250
-0.1400 0.0700 0.0180
-0.0700 0.0400 0.0100
0.0000 0.0147 0.0074
0.0700 0.0400 0.0100
0.1400 0.0700 0.0180
0.2790 0.2200 0.0250
0.4190 0.3800 0.0970
0.5590 0.8000 0.2030
0.6980 1.0100 0.2570
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDi">
<description>Drag_induced</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCDge</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 0.2270
-0.2620 0.0670
-0.1750 0.0480
-0.0870 0.0060
0.0000 0.0060
0.0700 0.0130
0.1400 0.0200
0.2090 0.0470
0.2790 0.0670
0.3490 0.2120
0.4190 0.2270
0.4890 0.3310
0.5590 0.4740
0.6980 0.2120
0.7850 0.9130
0.8730 0.7210
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDbeta">
<description>Drag_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/mag-beta-rad</property>
<property>aero/function/kCDge</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 2.5954
-0.2620 3.2686
-0.1750 3.3563
-0.0870 3.0533
0.0000 3.8228
0.0700 4.3450
0.1400 4.1909
0.2090 3.7331
0.2790 3.1268
0.3490 2.8246
0.4190 2.4657
0.4890 2.2127
0.5590 1.9317
0.6980 1.2283
0.7850 0.9522
0.8730 0.7015
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDDe">
<description>Drag_due_to_Elevator_Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/mag-elevator-pos-rad</property>
<value>0.0438</value>
</product>
</function>
</axis>
<axis name="SIDE">
<function name="aero/coefficient/CYb">
<description>Side_force_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/beta-rad</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 -0.8594
0.0700 -0.0974
0.5590 -0.0115
0.8730 -0.3552
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CYda">
<description>Side_force_due_to_aileron</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/left-aileron-pos-rad</property>
<value>-0.0012</value>
</product>
</function>
<function name="aero/coefficient/CYdr">
<description>Side_force_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/rudder-pos-rad</property>
<value>0.3724</value>
</product>
</function>
</axis>
<axis name="LIFT">
<function name="aero/coefficient/CLalpha">
<description>Lift_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCLge</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<independentVar lookup="column">velocities/mach</independentVar>
<tableData>
0.5000 1.4000
-0.3490 -0.9300 -0.2500
-0.2620 -0.8600 -0.2300
-0.1750 -0.5800 -0.1600
-0.0870 -0.2600 -0.0700
0.0000 0.0600 0.0200
0.0700 0.3000 0.0800
0.1400 0.5800 0.1600
0.2090 0.7800 0.2100
0.2790 0.8800 0.2400
0.3490 1.0100 0.2700
0.4190 1.0800 0.2900
0.4890 1.1600 0.3100
0.5590 1.1900 0.3200
0.6980 1.1700 0.3100
0.7850 1.0900 0.2900
0.8730 1.0500 0.2800
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CLDe">
<description>Lift_due_to_Elevator_Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/elevator-pos-rad</property>
<value>0.5730</value>
</product>
</function>
<function name="aero/coefficient/CLadot">
<description>Lift_due_to_alpha_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/alphadot-rad_sec</property>
<property>aero/ci2vel</property>
<value>17.2232</value>
</product>
</function>
<function name="aero/coefficient/CLq">
<description>Lift_due_to_pitch_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>velocities/q-aero-rad_sec</property>
<property>aero/ci2vel</property>
<value>-17.2232</value>
</product>
</function>
</axis>
<axis name="ROLL">
<function name="aero/coefficient/Clb">
<description>Roll_moment_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/beta-rad</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 0.0286
-0.1750 -0.2292
0.0000 -0.0573
0.2090 -0.1719
0.3140 -0.1146
0.4190 -0.1719
0.6980 -0.0745
0.7850 -0.1146
0.8730 -0.1203
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Clp">
<description>Roll_moment_due_to_roll_rate_(roll_damping)</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/p-aero-rad_sec</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
0.0000 -0.4000
0.3490 -0.3100
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Clr">
<description>Roll_moment_due_to_yaw_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/r-aero-rad_sec</property>
<value>0.0001</value>
</product>
</function>
<function name="aero/coefficient/ClDa">
<description>Roll_moment_due_to_aileron</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/left-aileron-pos-rad</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 0.0172
-0.0870 0.0372
0.1400 0.0401
0.5590 0.0057
0.8730 0.0057
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/ClDr">
<description>Roll_moment_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/rudder-pos-rad</property>
<value>0.0115</value>
</product>
</function>
</axis>
<axis name="PITCH">
<function name="aero/coefficient/Cmalpha">
<description>Pitch_moment_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/alpha-rad</property>
<property>aero/function/kCmge</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 -1.1459
-0.2620 -0.5730
-0.1310 -0.0573
0.0000 -0.2292
0.2790 -0.5157
0.4190 -0.8594
0.5590 -0.4584
0.8730 -0.5157
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cmadot">
<description>Pitch_moment_due_to_alpha_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/ci2vel</property>
<property>aero/alphadot-rad_sec</property>
<value>-11.8870</value>
</product>
</function>
<function name="aero/coefficient/CmM">
<description>Pitch_moment_due_to_Mach</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>velocities/mach</property>
<value>-0.0000</value>
</product>
</function>
<function name="aero/coefficient/Cmq">
<description>Pitch_moment_due_to_pitch_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/ci2vel</property>
<property>velocities/q-aero-rad_sec</property>
<value>-4.7000</value>
</product>
</function>
<function name="aero/coefficient/Cmde">
<description>Pitch_moment_due_to_elevator_deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>fcs/elevator-pos-rad</property>
<value>-0.4580</value>
</product>
</function>
</axis>
<axis name="YAW">
<function name="aero/coefficient/Cnb">
<description>Yaw_moment_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/beta-rad</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 0.0745
0.0000 0.1776
0.3490 0.0057
0.5240 -0.0974
0.8730 -0.0286
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cnp">
<description>Yaw_moment_due_to_roll_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/p-aero-rad_sec</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 0.1100
-0.0870 -0.1400
0.0000 -0.1000
0.2790 0.0100
0.4190 -0.1300
0.8730 -0.1800
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cnr">
<description>Yaw_moment_due_to_yaw_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/r-aero-rad_sec</property>
<value>-0.4447</value>
</product>
</function>
<function name="aero/coefficient/Cnda">
<description>Yaw_moment_due_to_aileron</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/left-aileron-pos-rad</property>
<value>0.0022</value>
</product>
</function>
<function name="aero/coefficient/Cndr">
<description>Yaw_moment_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/rudder-pos-rad</property>
<table>
<independentVar>aero/alpha-rad</independentVar>
<tableData>
-0.3490 -0.0688
0.8730 -0.0115
</tableData>
</table>
</product>
</function>
</axis>
</aerodynamics>
<output name="output.csv" type="CSV" rate="1">
<rates> ON </rates>
<velocities> ON </velocities>
<position> ON </position>
</output>
`</fdm_config>The autopilot file is the same as @theorynice provided, I've only added ap/active-waypoint property otherwise JSBSim would throw an error as it is missing. |
Beta Was this translation helpful? Give feedback.
-
|
Confirm the engine work
…---Original---
From: ***@***.***>
Date: Fri, Aug 23, 2024 10:28 AM
To: ***@***.***>;
Cc: ***@***.******@***.***>;
Subject: Re: [JSBSim-Team/jsbsim] Autopilot for F-15 (Discussion #444)
我在编写f16自动驾驶仪时也遇到了类似的问题,不知道该怎么解决,我是将JSBSim中的C310ap.xml运用到f16中,并且改写了pitch yaw roll Channel,但还是不成功,可以提一些建议吗
—
Reply to this email directly, view it on GitHub, or unsubscribe.
You are receiving this because you were mentioned.Message ID: ***@***.***>
|
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Hi all, I am developing a heading hold autopilot for F-15. I try to transplant the c172ap.xml to F-15, but failed to get an ideal result after adjusting the gain of PID. Does anyone do similar work? My modified code of f15.xml is shown below:
The altitude change when auto level flight is :

Beta Was this translation helpful? Give feedback.
All reactions