Replies: 6 comments 19 replies
-
|
Typically any autopilot implementation will export a number of properties, e.g. jsbsim/aircraft/c172x/c172ap.xml Lines 27 to 36 in 5ac73c2 So you would then use the FGPropertyManager* pm = fdm->GetPropertyManager();
FGPropertyNode* node = pm->GetNode("/my/property/name");
while (fdm->Run()) {
x = node->getDoubleValue();
} |
Beta Was this translation helpful? Give feedback.
-
|
So I can use Tie function in FGFCS::bind, for example, write |
Beta Was this translation helpful? Give feedback.
-
|
No, you would use the PropertyManager to write a value to FGPropertyManager* pm = fdm->GetPropertyManager();
FGPropertyNode* node = pm->GetNode("ap/altitude_setpoint");
// Set the altitude set-point to 2000ft
node->setDoubleValue(2000); |
Beta Was this translation helpful? Give feedback.
-
|
I can only find fdm from the FCS.cpp file, I don't know where is the fdm in the UE project |
Beta Was this translation helpful? Give feedback.
-
|
I change the function copy to jsbsim as void UJSBSimMovementComponent::CopyToJSBSim() But it doesn't work. Why? |
Beta Was this translation helpful? Give feedback.
-
What doesn't work? What are you expecting to happen, and what do you see happening? |
Beta Was this translation helpful? Give feedback.
-
|
When I use FGPropertyManager* pm = FCS->GetPropertyManager().get(); //(or Exec->GetPropertyManager().get();)
FGPropertyNode* node_rh = pm->GetNode("ap/heading_setpoint");the node_rh will return NULL. But I use the model of c172x, it should already include the autopilot. So I don't know how to repair my codes. Sometimes node_al = pm->GetNode("ap/altitude_setpoint"); will return an address, but not controlling the elevator. |
Beta Was this translation helpful? Give feedback.
-
|
These functions already exist in the UE plugin and also work in Blueprints. I added them many months ago. Read Me File: https://github.com/JSBSim-Team/jsbsim/tree/9f92a0603498ff09dd84e77b6e6022b866fcb50f/UnrealEngine#extended-commands-and-properties 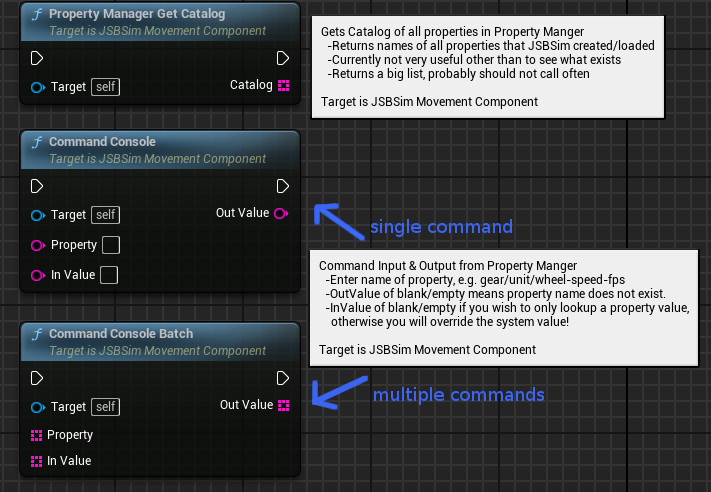
|
Beta Was this translation helpful? Give feedback.
-
|
I found that the roll channel can be controlled by ap/autopilot-roll-on, and also the ap/roll-attitude-mode. However, it looks, the attitude hold and heading hold still would not have any effect. |
Beta Was this translation helpful? Give feedback.
-
|
Yes I was curious so I tested the c172x and could not find any full working combination of settings for the auto pilot. But I tested c310 and seems that works good. I came to the same conclusion as you with the c172x, only Altitude control works. The ap/autopilot-roll-on and also the ap/roll-attitude-mode when enabled do seem to stabilize the aircraft but it defaults to a heading of 103, I tried to override some properties to change the heading but I gave up after a few tries. The Auto Pilot system is confusing. I looked at the test scripts, some of which test the auto pilot of the c172x and found the functions do not work as suggested in the scripts. In short I think c172x autopilot became broken in some update. The c310 seems to work good, but I only tested Heading and Altitude auto pilot controls. Edit: For some reason, you also need to manually use engine starter in UE5 to start the engines on the c310. Press keys Control+Q or in Blueprint there is already Set Engines Starter in example BP_Airliner you can attach to Begin Play. |
Beta Was this translation helpful? Give feedback.
-
|
As c310 is not suitable for my project, I checked the xml files again, and found that there is no "ap/aileron_cmd" property in c172r or c172x. Therefore the c172ap or other autopilot can not control the roll or heading positions of c172. |
Beta Was this translation helpful? Give feedback.
-
@cxr001 good catch! |
Beta Was this translation helpful? Give feedback.
-
|
Hmm, why are there two auto-pilot roll commands for roll control? Or was there some sort of renaming which was only done in one location and not the other? jsbsim/aircraft/c172x/c172x.xml Lines 381 to 390 in 98535e8 Looking at the autopilot file and searching through it I couldn't find |
Beta Was this translation helpful? Give feedback.
-
Take a look at the I don't see any support for scripts currently. |
Beta Was this translation helpful? Give feedback.
-
Hmm, that doesn't look like a script file, take a look at the example script files in the scripts directory. The snippet you've shown comes from either the FDM file or a systems file. |
Beta Was this translation helpful? Give feedback.
-
|
I think the code given by @gallonmate is a script, so I cannot use it. Forgive my poor English here. |
Beta Was this translation helpful? Give feedback.
-
|
@cxr001 yes, sorry. I was confused and assumed you had a script working and just wanted to manually set throttle. There is not any default autopilot throttle. There is an autopilot throttle example in the Global5000ap.xml |
Beta Was this translation helpful? Give feedback.
-
|
Thank you, I found it, named " fcs/throttle-pos-norm". Note the throttle command value in UE would always display as 0 here. |
Beta Was this translation helpful? Give feedback.
-
|
@cxr001 I've pushed a commit to fix the autopilot aileron command name in C172x - ae318de |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
I don't find a method to set roll pitch yaw command in c++, is that I need to write interface in FCS? How to use the ap xml code in c++?
Beta Was this translation helpful? Give feedback.
All reactions