List of questions about synthetic dataset preparation #539
Unanswered
AlbertoRemus
asked this question in
Q&A
Replies: 0 comments
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Hello and thanks for the amazing work!
I'm interested in reconstructing a synthetic 3D model from a set of images (like the one in the figure) and corresponding camera poses with respect to the world frame, by training your proposed model:
By following
https://github.com/NVlabs/instant-ngp/blob/master/docs/nerf_dataset_tips.md I prepared 100 200x200 images with the following "hyperparameters" (the 100 poses have been sampled from a 0.8 meters sphere pointing to the object frame)
In particular
camera_angle_x = 2*arctan( image_width / 2*focal_length_x )where
focal_length_x = focal_length_x_original * ( image_width / image_width_original )(image_width, image_height) = (200, 200)(image_width_original, image_height_original) = (960, 540)Here's the complete dataset for replication if needed
banana.zip
So far results are not yet satisfactory even though we can grasp the shape of the object:
Hereafter a list of questions:
in the lego synthetic dataset only parameter
camera_angle_x, why iscamera_angle_ynot specified? Is it because image width and height are equal (800x800?)is it equivalent to use
fl_x(andfl_y) parameters instead of the field of view?Again in the lego dataset I can see the parameter
rotationfor each frame, what's its meaning?As explained here Confusing coordinate system. #72 (comment) default scale is 0.33, so I was wondering which parameters need to be changed if the scale is set to 1.0
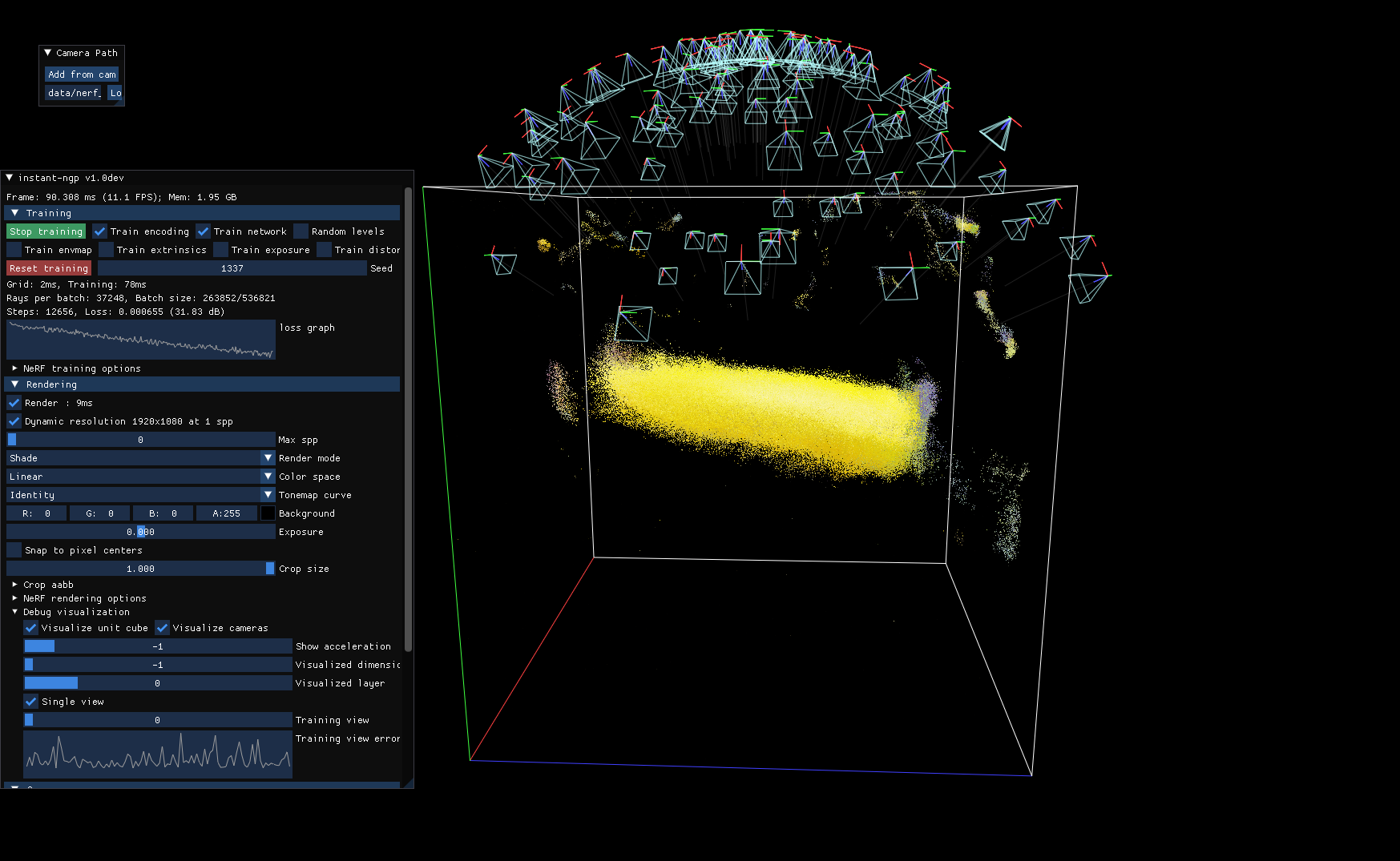
I upload one last picture to show that the model seems to be properly displayed at the center of the unit-cube and to ask (a more speculative question) about the possible reasons behind the artifacts close to the camera frames
Beta Was this translation helpful? Give feedback.
All reactions