diff --git a/docs/Contribution/Contributors/ReCamera_Model_Converstion_Mac_README.md b/docs/Contribution/Contributors/ReCamera_Model_Converstion_Mac_README.md
index a28fce1db8db9..91b4d4de9cae8 100644
--- a/docs/Contribution/Contributors/ReCamera_Model_Converstion_Mac_README.md
+++ b/docs/Contribution/Contributors/ReCamera_Model_Converstion_Mac_README.md
@@ -1,3 +1,5 @@
+---
+---
# YOLO11n Model Conversion for reCamera: Complete Guide
## Table of Contents
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/DashCamNet-with-Jetson-Xavier-NX-Multicamera.md b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/DashCamNet-with-Jetson-Xavier-NX-Multicamera.md
index 328a524ffa473..11e0b7547bbcd 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/DashCamNet-with-Jetson-Xavier-NX-Multicamera.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/DashCamNet-with-Jetson-Xavier-NX-Multicamera.md
@@ -1,497 +1,495 @@
----
-description: DashCamNet with Jetson Xavier NX Multicamera
-title: DashCamNet with Jetson Xavier NX Multicamera
-keywords:
- - Edge
- - reComputer
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /DashCamNet-with-Jetson-Xavier-NX-Multicamera
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# DashCamNet and PeopleNet with Jetson Xavier NX Multicamera
-
-## Introduction
-
-Nowadays, in the fields of autonomous driving, car recording and violation monitoring we often use artificial intelligence to help us identify vehicle information, vehicle license plates and surrounding obstacles. Thanks to the large number of pre-trained models provided by Nvidia NGC, we can do these complex tasks more easily.
-
-Creating an AI/machine learning model from scratch can cost you a lot of time and money. [Transfer learning](https://blogs.nvidia.com/blog/2019/02/07/what-is-transfer-learning/) is a popular technique that can be used to extract learned features from an existing neural network model to a new one. The NVIDIA TAO(*Train, Adapt, and Optimize*) Toolkit is a CLI and Jupyter notebook based solution of [NVIDIA TAO](https://developer.nvidia.com/tao), that abstracts away the AI/deep learning framework complexity, letting you fine-tune on high-quality NVIDIA pre-trained AI models with only a fraction of the data compared to training from scratch.
-
-The TAO Toolkit also supports 100+ permutations of NVIDIA-optimized model architectures and backbones such as EfficientNet, YOLOv3/v4, RetinaNet, FasterRCNN, UNET, and many more.
-
-
-
-Credit to NVIDIA's [repository](https://developer.nvidia.com/blog/creating-a-real-time-license-plate-detection-and-recognition-app/) and Tomasz's [project](https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines), we are going to detect cars and people with muliticamera deployed in Jetson Xavier NX. Both [Jetson SUB Mini PC](https://www.seeedstudio.com/Jetson-SUB-Mini-PC-Blue-p-5212.html) are good for this demo.
-
-*NVIDIA TAO Toolkit was previously named NVIDIA Transfer Learning Toolkit(Tlt).*
-
-
-
-- USB Webcam / Raspberry Pi Camera V2.1 / [IMX219-130 8MP cameras](https://www.seeedstudio.com/IMX219-130-Camera-130-FOV-Applicable-for-Jetson-Nano-p-4606.html) / [High quality 12.3MP IMX477 cameras](https://www.seeedstudio.com/High-Quality-Camera-For-Raspberry-Pi-Compute-Module-Jetson-Nano-p-4729.html)
-
-
-
-- Display with HDMI, DP or eDP interface
-- PC with Linux distribution operating system
-
-### Software Setup
-
-- Jetpack 4.5 or 4.6 for Jetson Xavier NX
-- Docker
-- DeepStream
-- TAO Toolkit
-- Python3.6 with Pypi(python3-pip) and Virtual Environments
-- NVIDIA Container Toolkit
-
-The methods of software installation will be provided in the following steps.
-
-## Pre-installation
-
-Before we start the project, we need to install Docker Engine on Ubuntu. There are several ways to install Docker Engine and you can choose either way depending on your needs. If you alreadly set it up, you can skip the step.
-
-- Most users [set up Docker’s repositories](https://docs.docker.com/engine/install/ubuntu/#install-using-the-repository) and install from them for the ease of installation and upgrade tasks, which is the recommended approach.
-- Some users download the DEB package and [install it manually](https://docs.docker.com/engine/install/ubuntu/#install-from-a-package) and manage upgrades completely manually. This is useful in situations such as installing Docker on air-gapped systems with no access to the internet.
-- In testing and development environments, some users choose to use automated [convenience scripts](https://docs.docker.com/engine/install/ubuntu/#install-using-the-convenience-script) to install Docker.
-
-Here we are going to use the first one. Before we install the docker, it is required to ensure the version of it is latest. The names of old versions might be `docker`, `docker.io`, or `docker-engine`, you can check it using the following command:
-
-```shell
-sudo apt-get purge docker docker-engine docker.io containerd runc
-```
-
-When you uninstall the docker, the contents of `/var/lib/docker/`, including images, containers, volumes, and networks, all of which are preserved. If you want to start with a clean installation, you can refer to the [uninstall Docker Engine](https://docs.docker.com/engine/install/ubuntu/#uninstall-docker-engine) section at the bottom of this page.
-
-### Install Docker using the repository
-
-Before we install Docker Engine on a new host machine, it is required to set up the Docker repository. Afterward, we then can install and update Docker from the repository.
-
-- **Step 1**. Set up the repository with `apt` package
-
-Update the `apt` package index and install packages to allow `apt` to use a repository over HTTPS with following commands:
-
- ```shell
- sudo apt-get update
- sudo apt-get install \
- ca-certificates \
- curl \
- gnupg \
- lsb-release
- ```
-
-Add Docker’s official GPG key:
-
- ```shell
- curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
- ```
-
-Use the following command to set up the **stable** repository. To add the **nightly** or **test** repository, add the word `nightly` or `test` (or both) after the word `stable` in the commands below. You can [Learn about **nightly** and **test** channels](https://docs.docker.com/engine/install/) here.
-
- ```shell
- echo \
- "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
- $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
- ```
-
-- **Step 2**. Install the Docker Engine
-
-Update the `apt` package index, and install the **latest version** of Docker Engine and containerd with following commands:
-
- ```shell
- sudo apt-get update
- sudo apt-get install docker-ce docker-ce-cli containerd.io
- ```
-
-We can verify whether the Docker Engine is installed correctly by running the `hello-world` image.
-
- ```shell
- sudo docker run hello-world
- ```
-
-- **Step 3**. Manage Docker as a non-root user with following processes.
-
-Create the `docker` group.
-
- ```shell
- sudo groupadd docker
- ```
-
-Add the user into the `docker` group.
-
- ```shell
- sudo usermod -aG docker $USER
- ```
-
-Log out and log back in to reevaluate the group membership.
-
-Verify that you can run `docker` commands without `sudo` by running `hello-world`
-
- ```shell
- docker run hello-world
- ```
-
-- **Step 4**. Set up the NVIDIA Container Toolkit with following processes:
-
-Setup the `stable` repository and the GPG key:
-
- ```shell
- distribution=$(. /etc/os-release;echo $ID$VERSION_ID) \
- && curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \
- && curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
- ```
-
-Update the package listing and install the `nvidia-docker2` package (and dependencies):
-
- ```shell
- sudo apt-get update
- sudo apt-get install -y nvidia-docker2
- ```
-
-Restart the Docker daemon to complete the installation after setting the default runtime:
-
- ```shell
- sudo systemctl restart docker
- ```
-
-## Getting Started
-
-### Install NVIDIA GPU Cloud CLI ARM64 Linux
-
-**NVIDIA GPU Cloud (NGC) CLI** is a Python-based command-line interface for managing Docker containers in the NGC Container Registry. With NGC CLI, you can perform many of the same operations that are available from the NGC website, such as running jobs and viewing Docker repositories within your organization and team space.
-
-- **Step 1**. Move to the [Download CLI](https://ngc.nvidia.com/setup/installers/cli) page and download the zip file that contains the binary. The NGC CLI binary for ARM64 is supported on Ubuntu 18.04 and later distributions.
-
-
-
-- **Step 2**. Transfer the zip file to a directory where you have permissions and unzip it and finally execute the binary.
-
-You can also download, unzip, and install from the command line by moving to a directory where you have execute permissions and then running the following command:
-
-```shell
-wget -O ngccli_arm64.zip https://ngc.nvidia.com/downloads/ngccli_arm64.zip && unzip -o ngccli_arm64.zip && chmod u+x ngc
-```
-
-Check the binary's md5 hash to ensure the file wasn't corrupted during download:
-
-```shell
-md5sum -c ngc.md5
-```
-
-- **Step 3**. Add your current directory to path:
-
-```shell
-echo "export PATH=\"\$PATH:$(pwd)\"" >> ~/.bash_profile && source ~/.bash_profile
-```
-
-You must configure NGC CLI for your use in order to run the commands.
-
-- **Step 4**. Enter the following command, including your API key when prompted:
-
-```shell
-ngc config set
-```
-
-#### NGC API key Generation
-
-It is required API key to configure NGC CLI, we can generate it through the NGC website.
-
-- **Step 1**. Move to the [website](https://catalog.ngc.nvidia.com/) and click "Sign In/Sign Up".
-
-
-
-- **Step 2**. Register an account as a NVIDIA developer.
-
-
-
-- **Step 3**. Choose an account to proceed.
-
-
-
-- **Step 4**. Click "Setup" on the upper right corner of the page.
-
-
-
-- **Step 5**. Select "Get API Key".
-
-
-
-- **Step 6**. Click "Generate API Key".
-
-
-
-- **Step 7**. The API Key will show at the bottom of the page.
-
-
-
-### Install the TAO Toolkit
-
-Python3 and python3-pip should be installed at the first:
-
-```shell
-sudo apt install -y python3 python3-pip
-```
-
-TAO Toolkit is a Python pip package that is hosted on the NVIDIA PyIndex. The package uses the docker restAPI under the hood to interact with the NGC Docker registry to pull and instantiate the underlying docker containers. At the previous steps, we have alreadly set an NGC account and generated an API key associated with the it. If you want to see more about [Installation Prerequisites](https://docs.nvidia.com/tao/tao-toolkit/text/tao_toolkit_quick_start_guide.html#install-prereq) section, you can click it for details on creating an NGC account and obtaining an API key.
-
-#### **Virtual Environment - Virtualenv**
-
-A Virtual Environment is an isolated working copy of Python which allows you to work on a specific project without worry of affecting other projects. For example, you can work on a project which requires Django 1.3 while processing a project which requires Django 1.0. You can click [here](http://pypi.python.org/pypi/virtualenv) to create isolated Python enviroments.
-
-It is highly recommanded to configure a virtual environment first and then install the TAO Toolkit.
-
-- You can install virtualenv via pip:
-
-```shell
-pip install virtualenv
-```
-
-- Create a virtual environment:
-
-```shell
-virtualenv venv
-```
-
-It creates a copy of Python in whichever directory you ran the command in, placing it in a folder named `venv`.
-
-- Activate the virtual environment:
-
-```shell
-source venv/bin/activate
-```
-
-- If you are done working in the virtual environment for the moment, you can deactivate it:
-
-```shell
-deactivate
-```
-
-This puts you back to the system’s default Python interpreter with all its installed libraries.
-
-To delete a virtual environment, just delete its folder.
-
-**virtualenvwarpper**
-
-After a while, though, you might end up with a lot of virtual environments littered across your system, and its possible you’ll forget their names or where they were placed. Hence, we are using virtualenvwarpper. The [virtualenvwrapper](http://virtualenvwrapper.readthedocs.org/en/latest/index.html) provides a set of commands which makes working with virtual environments much more pleasant. It also places all your virtual environments in one place.
-
-You can install (make sure **virtualenv** is already installed) :
-
- ```
- pip install virtualenvwrapper
- export WORKON_HOME=~/Envs
- source /usr/local/bin/virtualenvwrapper.sh
- ```
-
-If you want to see more information about it, please refer to [Full virtualenvwrapper install instructions](http://virtualenvwrapper.readthedocs.org/en/latest/install.html).)
-
-*You may follow the instructions in this [link](https://python-guide-cn.readthedocs.io/en/latest/dev/virtualenvs.html) to set up a Python virtualenv using a virtualenvwrapper.*
-
-#### **Set Python version in the Virtual Environment**
-
-- **Step 1**. Once you have followed the instructions to install `virtualenv` and `virtualenvwrapper`, set the Python version in the `virtualenv`. This can be done in either of the following ways:
-
-- Defining the environment variable called VIRTUALENVWRAPPER_PYTHON. This variable should point to the path where the python3 binary is installed in your local machine. You can also add it to your `.bashrc` or `.bash_profile` for setting your Python `virtualenv` by default.
-
-```shell
-export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3
-```
-
-- Setting the path to the python3 binary when creating your `virtualenv` using the `virtualenvwrapper` wrapper
-
-```shell
-mkvirtualenv launcher -p /path/to/your/python3
-```
-
-- **Step 2**. Once you have logged into the `virtualenv`, the command prompt should show the name of your virtual environment
-
-```shell
- (launcher) py-3.6.9 desktop:
-```
-
-- **Step 3**. When you are done with you session, you may deactivate your `virtualenv` using the `deactivate` command:
-
-```shell
-deactivate
-```
-
-- **Step 4**. You may re-instantiate this created `virtualenv` env using the `workon` command.
-
- ```shell
- workon launcher
- ```
-
-#### **Install the TAO package**
-
-- **step 1**. We have alreadly set up the the environmrnt that we need. Now we can install the TAO Launcher Python package called `nvidia-tao` with following command.
-
- ```shell
- pip3 install nvidia-pyindex
- pip3 install nvidia-tao
- ```
-
-- **step 2**. Invoke the entrypoints using the `tao` command.
-
-```
-tao --help
-```
-
-The sample output of the above command is:
-
-```
-usage: tao [-h]
- {list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,
- heartratenet,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,
- retinanet,speech_to_text,ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
- ...
-
-Launcher for TAO
-
-optional arguments:
--h, --help show this help message and exit
-
-tasks:
- {list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,heartratenet
- ,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,retinanet,speech_to_text,
- ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
-```
-
-- **step 3**. Note that under tasks you can see all the launcher-invokable tasks. The following are the specific tasks that help with handling the launched commands using the TAO Launcher:
-
- - list
- - stop
- - info
-
-**Caution:** If the terminal inform "bash: Cannot find tao", please use this command:
-
-```shell
-export PATH=$PATH:~/.local/bin
-tao --help
-```
-
-### Install DeepStream5
-
-- **Step 1**. Edit `/etc/apt/sources.list.d/nvidia-l4t-apt-source.list` and replace .6 with .5:
-
-```shell
-deb https://repo.download.nvidia.com/jetson/common r32.5 main
-#deb https://repo.download.nvidia.com/jetson/common r32.6 main
-deb https://repo.download.nvidia.com/jetson/t194 r32.5 main
-#deb https://repo.download.nvidia.com/jetson/t194 r32.6 main
-```
-
-- **Step 2**. Type `sudo apt update` and try again to install DeepStream 5.1.
-
-And then install it with the following command:
-
-```shell
-sudo -H pip3 install pyds-ext
-```
-
-For further information, please check the links down below:
-
-- [DeepStream-Docker Containers](https://docs.nvidia.com/metropolis/deepstream/dev-guide/text/DS_docker_containers.html#a-docker-container-for-jetson)
-- [Integrating TAO Models into DeepStream](https://docs.nvidia.com/tao/tao-toolkit/text/deepstream_tao_integration.html)
-- [DashCamNet](https://catalog.ngc.nvidia.com/orgs/nvidia/models/tlt_dashcamnet)
-
-### Install Jetson Multicamera Pipelines and Quick Start
-
-Finally, we are going to build a typical multi-camera pipeline, i.e. `N×(capture)->preprocess->batch->DNN-> <> ->encode->file I/O + display`, Using gstreamer and deepstream under-the-hood. Give programatic access to configure the pipeline in python via jetmulticam package.
-
-This project utilizes Nvidia HW accleration for minimal CPU usage. For example, you can perform object detection in real-time on 6 camera streams using as little as 16.5% CPU. You can easily build your custom logic in python by accessing image data (via np.array), as well object detection results.
-
-- **Step 1**. Install the Jetson Multicamera Pipelines with following command:
-
-```shell
-git clone https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines.git
-cd jetson-multicamera-pipelines
-bash scripts/install_dependencies.sh
-sudo -H pip3 install Cython
-sudo -H pip3 install .
-```
-
-- **Step 2**. Run example with your cameras:
-
-```shell
-source scripts/env_vars.sh
-cd examples
-sudo -H python3 example.py
-```
-
-*This is the 'example.py', you can apply it to either monocular camera or multi-camera.*
-
-```cpp
-import time
-from jetmulticam import CameraPipelineDNN
-from jetmulticam.models import PeopleNet, DashCamNet
-
-if __name__ == "__main__":
-
- pipeline = CameraPipelineDNN(
- cameras=[2, 5, 8],
- models=[
- PeopleNet.DLA1,
- DashCamNet.DLA0,
- # PeopleNet.GPU
- ],
- save_video=True,
- save_video_folder="/home/nx/logs/videos",
- display=True,
- )
-
- while pipeline.running():
- arr = pipeline.images[0] # np.array with shape (1080, 1920, 3), i.e. (1080p RGB image)
- dets = pipeline.detections[0] # Detections from the DNNs
- time.sleep(1/30)
-```
-
-This is the result of multi-camera shown up like:
-
-
-
-*More*
-
-There are more supported models / acceleratorss:
-
-```cpp
-pipeline = CameraPipelineDNN(
- cam_ids = [0, 1, 2]
- models=[
- models.PeopleNet.DLA0,
- models.PeopleNet.DLA1,
- models.PeopleNet.GPU,
- models.DashCamNet.DLA0,
- models.DashCamNet.DLA1,
- models.DashCamNet.GPU
- ]
- # ...
-)
-```
-
-**Caution:** If the terminal inform "EGL Not found", please check [EGLDevice](https://docs.nvidia.com/drive/drive_os_5.1.6.1L/nvvib_docs/index.html#page/DRIVE_OS_Linux_SDK_Development_Guide/Windows%20Systems/window_system_egl.html).
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: DashCamNet with Jetson Xavier NX Multicamera
+title: DashCamNet with Jetson Xavier NX Multicamera
+keywords:
+ - Edge
+ - reComputer
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /DashCamNet-with-Jetson-Xavier-NX-Multicamera
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# DashCamNet and PeopleNet with Jetson Xavier NX Multicamera
+
+## Introduction
+
+Nowadays, in the fields of autonomous driving, car recording and violation monitoring we often use artificial intelligence to help us identify vehicle information, vehicle license plates and surrounding obstacles. Thanks to the large number of pre-trained models provided by Nvidia NGC, we can do these complex tasks more easily.
+
+Creating an AI/machine learning model from scratch can cost you a lot of time and money. [Transfer learning](https://blogs.nvidia.com/blog/2019/02/07/what-is-transfer-learning/) is a popular technique that can be used to extract learned features from an existing neural network model to a new one. The NVIDIA TAO(*Train, Adapt, and Optimize*) Toolkit is a CLI and Jupyter notebook based solution of [NVIDIA TAO](https://developer.nvidia.com/tao), that abstracts away the AI/deep learning framework complexity, letting you fine-tune on high-quality NVIDIA pre-trained AI models with only a fraction of the data compared to training from scratch.
+
+The TAO Toolkit also supports 100+ permutations of NVIDIA-optimized model architectures and backbones such as EfficientNet, YOLOv3/v4, RetinaNet, FasterRCNN, UNET, and many more.
+
+
+
+Credit to NVIDIA's [repository](https://developer.nvidia.com/blog/creating-a-real-time-license-plate-detection-and-recognition-app/) and Tomasz's [project](https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines), we are going to detect cars and people with muliticamera deployed in Jetson Xavier NX. Both [Jetson SUB Mini PC](https://www.seeedstudio.com/Jetson-SUB-Mini-PC-Blue-p-5212.html) are good for this demo.
+
+*NVIDIA TAO Toolkit was previously named NVIDIA Transfer Learning Toolkit(Tlt).*
+
+
+
+- USB Webcam / Raspberry Pi Camera V2.1 / [IMX219-130 8MP cameras](https://www.seeedstudio.com/IMX219-130-Camera-130-FOV-Applicable-for-Jetson-Nano-p-4606.html) / [High quality 12.3MP IMX477 cameras](https://www.seeedstudio.com/High-Quality-Camera-For-Raspberry-Pi-Compute-Module-Jetson-Nano-p-4729.html)
+
+
+
+- Display with HDMI, DP or eDP interface
+- PC with Linux distribution operating system
+
+### Software Setup
+
+- Jetpack 4.5 or 4.6 for Jetson Xavier NX
+- Docker
+- DeepStream
+- TAO Toolkit
+- Python3.6 with Pypi(python3-pip) and Virtual Environments
+- NVIDIA Container Toolkit
+
+The methods of software installation will be provided in the following steps.
+
+## Pre-installation
+
+Before we start the project, we need to install Docker Engine on Ubuntu. There are several ways to install Docker Engine and you can choose either way depending on your needs. If you alreadly set it up, you can skip the step.
+
+- Most users [set up Docker’s repositories](https://docs.docker.com/engine/install/ubuntu/#install-using-the-repository) and install from them for the ease of installation and upgrade tasks, which is the recommended approach.
+- Some users download the DEB package and [install it manually](https://docs.docker.com/engine/install/ubuntu/#install-from-a-package) and manage upgrades completely manually. This is useful in situations such as installing Docker on air-gapped systems with no access to the internet.
+- In testing and development environments, some users choose to use automated [convenience scripts](https://docs.docker.com/engine/install/ubuntu/#install-using-the-convenience-script) to install Docker.
+
+Here we are going to use the first one. Before we install the docker, it is required to ensure the version of it is latest. The names of old versions might be `docker`, `docker.io`, or `docker-engine`, you can check it using the following command:
+
+```shell
+sudo apt-get purge docker docker-engine docker.io containerd runc
+```
+
+When you uninstall the docker, the contents of `/var/lib/docker/`, including images, containers, volumes, and networks, all of which are preserved. If you want to start with a clean installation, you can refer to the [uninstall Docker Engine](https://docs.docker.com/engine/install/ubuntu/#uninstall-docker-engine) section at the bottom of this page.
+
+### Install Docker using the repository
+
+Before we install Docker Engine on a new host machine, it is required to set up the Docker repository. Afterward, we then can install and update Docker from the repository.
+
+- **Step 1**. Set up the repository with `apt` package
+
+Update the `apt` package index and install packages to allow `apt` to use a repository over HTTPS with following commands:
+
+ ```shell
+ sudo apt-get update
+ sudo apt-get install \
+ ca-certificates \
+ curl \
+ gnupg \
+ lsb-release
+ ```
+
+Add Docker’s official GPG key:
+
+ ```shell
+ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
+ ```
+
+Use the following command to set up the **stable** repository. To add the **nightly** or **test** repository, add the word `nightly` or `test` (or both) after the word `stable` in the commands below. You can [Learn about **nightly** and **test** channels](https://docs.docker.com/engine/install/) here.
+
+ ```shell
+ echo \
+ "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
+ $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
+ ```
+
+- **Step 2**. Install the Docker Engine
+
+Update the `apt` package index, and install the **latest version** of Docker Engine and containerd with following commands:
+
+ ```shell
+ sudo apt-get update
+ sudo apt-get install docker-ce docker-ce-cli containerd.io
+ ```
+
+We can verify whether the Docker Engine is installed correctly by running the `hello-world` image.
+
+ ```shell
+ sudo docker run hello-world
+ ```
+
+- **Step 3**. Manage Docker as a non-root user with following processes.
+
+Create the `docker` group.
+
+ ```shell
+ sudo groupadd docker
+ ```
+
+Add the user into the `docker` group.
+
+ ```shell
+ sudo usermod -aG docker $USER
+ ```
+
+Log out and log back in to reevaluate the group membership.
+
+Verify that you can run `docker` commands without `sudo` by running `hello-world`
+
+ ```shell
+ docker run hello-world
+ ```
+
+- **Step 4**. Set up the NVIDIA Container Toolkit with following processes:
+
+Setup the `stable` repository and the GPG key:
+
+ ```shell
+ distribution=$(. /etc/os-release;echo $ID$VERSION_ID) \
+ && curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \
+ && curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
+ ```
+
+Update the package listing and install the `nvidia-docker2` package (and dependencies):
+
+ ```shell
+ sudo apt-get update
+ sudo apt-get install -y nvidia-docker2
+ ```
+
+Restart the Docker daemon to complete the installation after setting the default runtime:
+
+ ```shell
+ sudo systemctl restart docker
+ ```
+
+## Getting Started
+
+### Install NVIDIA GPU Cloud CLI ARM64 Linux
+
+**NVIDIA GPU Cloud (NGC) CLI** is a Python-based command-line interface for managing Docker containers in the NGC Container Registry. With NGC CLI, you can perform many of the same operations that are available from the NGC website, such as running jobs and viewing Docker repositories within your organization and team space.
+
+- **Step 1**. Move to the [Download CLI](https://ngc.nvidia.com/setup/installers/cli) page and download the zip file that contains the binary. The NGC CLI binary for ARM64 is supported on Ubuntu 18.04 and later distributions.
+
+
+
+- **Step 2**. Transfer the zip file to a directory where you have permissions and unzip it and finally execute the binary.
+
+You can also download, unzip, and install from the command line by moving to a directory where you have execute permissions and then running the following command:
+
+```shell
+wget -O ngccli_arm64.zip https://ngc.nvidia.com/downloads/ngccli_arm64.zip && unzip -o ngccli_arm64.zip && chmod u+x ngc
+```
+
+Check the binary's md5 hash to ensure the file wasn't corrupted during download:
+
+```shell
+md5sum -c ngc.md5
+```
+
+- **Step 3**. Add your current directory to path:
+
+```shell
+echo "export PATH=\"\$PATH:$(pwd)\"" >> ~/.bash_profile && source ~/.bash_profile
+```
+
+You must configure NGC CLI for your use in order to run the commands.
+
+- **Step 4**. Enter the following command, including your API key when prompted:
+
+```shell
+ngc config set
+```
+
+#### NGC API key Generation
+
+It is required API key to configure NGC CLI, we can generate it through the NGC website.
+
+- **Step 1**. Move to the [website](https://catalog.ngc.nvidia.com/) and click "Sign In/Sign Up".
+
+
+
+- **Step 2**. Register an account as a NVIDIA developer.
+
+
+
+- **Step 3**. Choose an account to proceed.
+
+
+
+- **Step 4**. Click "Setup" on the upper right corner of the page.
+
+
+
+- **Step 5**. Select "Get API Key".
+
+
+
+- **Step 6**. Click "Generate API Key".
+
+
+
+- **Step 7**. The API Key will show at the bottom of the page.
+
+
+
+### Install the TAO Toolkit
+
+Python3 and python3-pip should be installed at the first:
+
+```shell
+sudo apt install -y python3 python3-pip
+```
+
+TAO Toolkit is a Python pip package that is hosted on the NVIDIA PyIndex. The package uses the docker restAPI under the hood to interact with the NGC Docker registry to pull and instantiate the underlying docker containers. At the previous steps, we have alreadly set an NGC account and generated an API key associated with the it. If you want to see more about [Installation Prerequisites](https://docs.nvidia.com/tao/tao-toolkit/text/tao_toolkit_quick_start_guide.html#install-prereq) section, you can click it for details on creating an NGC account and obtaining an API key.
+
+#### **Virtual Environment - Virtualenv**
+
+A Virtual Environment is an isolated working copy of Python which allows you to work on a specific project without worry of affecting other projects. For example, you can work on a project which requires Django 1.3 while processing a project which requires Django 1.0. You can click [here](http://pypi.python.org/pypi/virtualenv) to create isolated Python enviroments.
+
+It is highly recommanded to configure a virtual environment first and then install the TAO Toolkit.
+
+- You can install virtualenv via pip:
+
+```shell
+pip install virtualenv
+```
+
+- Create a virtual environment:
+
+```shell
+virtualenv venv
+```
+
+It creates a copy of Python in whichever directory you ran the command in, placing it in a folder named `venv`.
+
+- Activate the virtual environment:
+
+```shell
+source venv/bin/activate
+```
+
+- If you are done working in the virtual environment for the moment, you can deactivate it:
+
+```shell
+deactivate
+```
+
+This puts you back to the system’s default Python interpreter with all its installed libraries.
+
+To delete a virtual environment, just delete its folder.
+
+**virtualenvwarpper**
+
+After a while, though, you might end up with a lot of virtual environments littered across your system, and its possible you’ll forget their names or where they were placed. Hence, we are using virtualenvwarpper. The [virtualenvwrapper](http://virtualenvwrapper.readthedocs.org/en/latest/index.html) provides a set of commands which makes working with virtual environments much more pleasant. It also places all your virtual environments in one place.
+
+You can install (make sure **virtualenv** is already installed) :
+
+ ```
+ pip install virtualenvwrapper
+ export WORKON_HOME=~/Envs
+ source /usr/local/bin/virtualenvwrapper.sh
+ ```
+
+If you want to see more information about it, please refer to [Full virtualenvwrapper install instructions](http://virtualenvwrapper.readthedocs.org/en/latest/install.html).)
+
+*You may follow the instructions in this [link](https://python-guide-cn.readthedocs.io/en/latest/dev/virtualenvs.html) to set up a Python virtualenv using a virtualenvwrapper.*
+
+#### **Set Python version in the Virtual Environment**
+
+- **Step 1**. Once you have followed the instructions to install `virtualenv` and `virtualenvwrapper`, set the Python version in the `virtualenv`. This can be done in either of the following ways:
+
+- Defining the environment variable called VIRTUALENVWRAPPER_PYTHON. This variable should point to the path where the python3 binary is installed in your local machine. You can also add it to your `.bashrc` or `.bash_profile` for setting your Python `virtualenv` by default.
+
+```shell
+export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3
+```
+
+- Setting the path to the python3 binary when creating your `virtualenv` using the `virtualenvwrapper` wrapper
+
+```shell
+mkvirtualenv launcher -p /path/to/your/python3
+```
+
+- **Step 2**. Once you have logged into the `virtualenv`, the command prompt should show the name of your virtual environment
+
+```shell
+ (launcher) py-3.6.9 desktop:
+```
+
+- **Step 3**. When you are done with you session, you may deactivate your `virtualenv` using the `deactivate` command:
+
+```shell
+deactivate
+```
+
+- **Step 4**. You may re-instantiate this created `virtualenv` env using the `workon` command.
+
+ ```shell
+ workon launcher
+ ```
+
+#### **Install the TAO package**
+
+- **step 1**. We have alreadly set up the the environmrnt that we need. Now we can install the TAO Launcher Python package called `nvidia-tao` with following command.
+
+ ```shell
+ pip3 install nvidia-pyindex
+ pip3 install nvidia-tao
+ ```
+
+- **step 2**. Invoke the entrypoints using the `tao` command.
+
+```
+tao --help
+```
+
+The sample output of the above command is:
+
+```
+usage: tao [-h]
+ {list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,
+ heartratenet,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,
+ retinanet,speech_to_text,ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
+ ...
+
+Launcher for TAO
+
+optional arguments:
+-h, --help show this help message and exit
+
+tasks:
+ {list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,heartratenet
+ ,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,retinanet,speech_to_text,
+ ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
+```
+
+- **step 3**. Note that under tasks you can see all the launcher-invokable tasks. The following are the specific tasks that help with handling the launched commands using the TAO Launcher:
+
+ - list
+ - stop
+ - info
+
+**Caution:** If the terminal inform "bash: Cannot find tao", please use this command:
+
+```shell
+export PATH=$PATH:~/.local/bin
+tao --help
+```
+
+### Install DeepStream5
+
+- **Step 1**. Edit `/etc/apt/sources.list.d/nvidia-l4t-apt-source.list` and replace .6 with .5:
+
+```shell
+deb https://repo.download.nvidia.com/jetson/common r32.5 main
+#deb https://repo.download.nvidia.com/jetson/common r32.6 main
+deb https://repo.download.nvidia.com/jetson/t194 r32.5 main
+#deb https://repo.download.nvidia.com/jetson/t194 r32.6 main
+```
+
+- **Step 2**. Type `sudo apt update` and try again to install DeepStream 5.1.
+
+And then install it with the following command:
+
+```shell
+sudo -H pip3 install pyds-ext
+```
+
+For further information, please check the links down below:
+
+- [DeepStream-Docker Containers](https://docs.nvidia.com/metropolis/deepstream/dev-guide/text/DS_docker_containers.html#a-docker-container-for-jetson)
+- [Integrating TAO Models into DeepStream](https://docs.nvidia.com/tao/tao-toolkit/text/deepstream_tao_integration.html)
+- [DashCamNet](https://catalog.ngc.nvidia.com/orgs/nvidia/models/tlt_dashcamnet)
+
+### Install Jetson Multicamera Pipelines and Quick Start
+
+Finally, we are going to build a typical multi-camera pipeline, i.e. `N×(capture)->preprocess->batch->DNN-> <> ->encode->file I/O + display`, Using gstreamer and deepstream under-the-hood. Give programatic access to configure the pipeline in python via jetmulticam package.
+
+This project utilizes Nvidia HW accleration for minimal CPU usage. For example, you can perform object detection in real-time on 6 camera streams using as little as 16.5% CPU. You can easily build your custom logic in python by accessing image data (via np.array), as well object detection results.
+
+- **Step 1**. Install the Jetson Multicamera Pipelines with following command:
+
+```shell
+git clone https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines.git
+cd jetson-multicamera-pipelines
+bash scripts/install_dependencies.sh
+sudo -H pip3 install Cython
+sudo -H pip3 install .
+```
+
+- **Step 2**. Run example with your cameras:
+
+```shell
+source scripts/env_vars.sh
+cd examples
+sudo -H python3 example.py
+```
+
+*This is the 'example.py', you can apply it to either monocular camera or multi-camera.*
+
+```cpp
+import time
+from jetmulticam import CameraPipelineDNN
+from jetmulticam.models import PeopleNet, DashCamNet
+
+if __name__ == "__main__":
+
+ pipeline = CameraPipelineDNN(
+ cameras=[2, 5, 8],
+ models=[
+ PeopleNet.DLA1,
+ DashCamNet.DLA0,
+ # PeopleNet.GPU
+ ],
+ save_video=True,
+ save_video_folder="/home/nx/logs/videos",
+ display=True,
+ )
+
+ while pipeline.running():
+ arr = pipeline.images[0] # np.array with shape (1080, 1920, 3), i.e. (1080p RGB image)
+ dets = pipeline.detections[0] # Detections from the DNNs
+ time.sleep(1/30)
+```
+
+This is the result of multi-camera shown up like:
+
+
+
+*More*
+
+There are more supported models / acceleratorss:
+
+```cpp
+pipeline = CameraPipelineDNN(
+ cam_ids = [0, 1, 2]
+ models=[
+ models.PeopleNet.DLA0,
+ models.PeopleNet.DLA1,
+ models.PeopleNet.GPU,
+ models.DashCamNet.DLA0,
+ models.DashCamNet.DLA1,
+ models.DashCamNet.GPU
+ ]
+ # ...
+)
+```
+
+**Caution:** If the terminal inform "EGL Not found", please check [EGLDevice](https://docs.nvidia.com/drive/drive_os_5.1.6.1L/nvvib_docs/index.html#page/DRIVE_OS_Linux_SDK_Development_Guide/Windows%20Systems/window_system_egl.html).
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Jetson-Nano-MaskCam.md b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Jetson-Nano-MaskCam.md
index a3071c619736e..e45b97e84938e 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Jetson-Nano-MaskCam.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Jetson-Nano-MaskCam.md
@@ -1,237 +1,235 @@
----
-description: MaskCam
-title: MaskCam
-keywords:
- - Edge
- - reComputer Application
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Jetson-Nano-MaskCam
-sku: 102110483, 102110484, 114110049, 102110637, 110061363, 110061401, 110061361, 110061404, B110061361, 110061481
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# Maskcam - Crowd Face Mask Usage Monitoring based on Jetson Nano
-
-## **Introduction**
-
-Due to the ravages of the COVID - 19, in many public places, we often see the requirement to wear a mask. There are usually managers at the gate of the area to observe whether people are wearing masks. Maybe it's a very simple task for humans, but if we combines it with Jetson Nano, graphics capture and edge computing with AI, it will be a very interesting and socially valuable task.
-
-MaskCam was developed by Berkeley Design Technology, Inc. (BDTI) and Tryolabs S.A., with development funded by NVIDIA. MaskCam is offered under the MIT License. For more information about MaskCam, please see the [report from BDTI](https://www.bdti.com/maskcam). If you have questions, please email BDTI at maskcam@bdti.com.
-
-In this project, we will use the [NVIDIA® Jetson Nano™ 4GB Developer Kit](https://www.seeedstudio.com/NVIDIA-Jetson-Nano-Development-Kit-B01-p-4437.html) along with other accessories. At the same time, you can choose the [A206 Carrier Board](https://www.seeedstudio.com/A206-Carrier-Board-for-Jetson-Nano-Xavier-NX-p-5132.html) from Seeed, which has the same size and functional design as NVIDIA's official carrier board, and also, it has excellent stability and versatility.
-
-## **Perparation**
-
-### **Hardware Requirement**
-
-- [NVIDIA® Jetson Nano™ 4GB Developer Kit](https://www.seeedstudio.com/NVIDIA-Jetson-Nano-Development-Kit-B01-p-4437.html) (JetPack 4.6)
-
-- [A206 Carrier Board](https://www.seeedstudio.com/A206-Carrier-Board-for-Jetson-Nano-Xavier-NX-p-5132.html)(optional)
-
-- 7-inch hdmi monitor and HDMI cable
-
-- USB Docking Station
-
-- Mouse and Keyboard
-
-- 5V 4A Power Adapter
-
-- USB Camera
-
-- Ethernet Cable
-
-- PC with Windows11 (or Windows10/Ubuntu18.04/ OSX Big Sur)
-
-### **Software Requirement**
-
-- docker
-
-- docker-compose
-
-- Video Software (Display RTSP streams,like VLC/QuickTime/PotPlayer)
-
-## **Get Started**
-
-### **Jetson Nano Setup**
-
-- #### **Step 1.** Download MaskCam container from Docker Hub
-
-```shell
-sudo docker pull maskcam/maskcam-beta
-```
-
-
-
-- #### **Step 2.** Find Jetson Nano IP Address with the command ```ifconfig```
-
-```shell
-sudo ifconfig
-```
-
-
-
-- #### **Step 3.** Start MaskCam with docker
-
-Remember to connect your Jetson Nano with a USB camera, and then, tab the command below into the terminal.
-
-```shell
-sudo docker run --runtime nvidia --privileged --rm -it --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
-```
-
-
-
-**Note:** Replace `````` with your own Jetson Nano's IP address in this command.
-
-If you don't want to use the default input device, there are also two different commands to choose and replace the command above.
-
-Use the /dev/video1 camera device:
-
-```shell
-#Use the /dev/video1 camera device
-sudo docker run --runtime nvidia --privileged --rm -it --env MASKCAM_INPUT=v4l2:///dev/video1 --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
-```
-
-Use the CSI camera device:
-
-```shell
-#Use the CSI camera device
-sudo docker run --runtime nvidia --privileged --rm -it --env MASKCAM_INPUT=v4l2://0 --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
-```
-
-- #### **Step 4.** View the live vedio stream through the ```MASKCAM_DEVICE_ADDRESS```
-
-```shell
-Streaming at rtsp://aaa.bbb.ccc.ddd:8554/maskcam
-```
-
-
-
-**Note:** ```aaa.bbb.ccc.ddd``` is the address that you provided in ```MASKCAM_DEVICE_ADDRESS``` previously.
-
-You can copy-paste that URL into your RSTP streaming viewer on another computer. In the video stream, if you are not wearing a mask, you will see a red frame on your face. Otherwise, you will see a green frame.
-
-### **MQTT Server Setup**
-
- In addition to the basic function, it also includes the function of the remote [server](https://github.com/bdtinc/maskcam/blob/main/server) in this library which means your PC can receive statistics from the device, store them in a database, and have a web-based GUI frontend to display them.
-
-In this article, all demos about the server are based on Window11 system host, you can also find the instruction using Linux system through this article: [Maskcam](https://github.com/bdtinc/maskcam).
-
-- #### **Step1.** Install Docker and Docker-compose on your PC
-
-Download the installation package of [Docker](https://www.docker.com/) from its official website: [https://docs.docker.com/get-docker/](https://docs.docker.com/get-docker/)
-
-Note: If there exists a message that says ```WLS 2 installization is incomplete.``` in the progress of installization, click the link in the prompt box, download and install thee Linux kernel update package.
-The you can run ```docker```.
-
-- #### **Step2.** Set up build directory
-
-Run ```Windows PowerShell``` as administrator
-
-Move to the root of the drive which you will be using, such as :
-
-```shell
-cd e:\
-```
-
-Download MaskCam repo :
-
-```shell
-Invoke-WebRequest https://github.com/bdtinc/maskcam/archive/refs/heads/main.zip -OutFile e:\maskcam.zip
-```
-
-Unzip it to the path ```e:\maskcam``` :
-
-```shell
-Expand-Archive e:\maskcam.zip -DestinationPath e:\maskcam
-```
-
-
-
-Move To the maskcam server folder, which has four containers: the Mosquitto broker, backend API, database, and Streamlit frontend.
-
-```shell
-cd maskcam\maskcam-main\server
-```
-
-Then, create the ```.env``` files by copying the default templates:
-
-```shell
-cp database.env.template database.env
-cp frontend.env.template frontend.env
-cp backend.env.template backend.env
-```
-
-Open the ```database.env``` :
-
-```shell
-notepad database.env
-```
-
-Replace the ``````, ``````, and `````` fields with your own values
-
-
-
-- #### **Step3.** Build and run local server
-
-After editing the database environment file, you're ready to build all the containers and run them with a single command:
-
-```shell
-sudo docker-compose up -d
-```
-
-
-
-Next, open a web browser and enter the server IP to visit the frontend webpage:
-
-```http://:8501/```
-
-
-
-**Note:** Replace `````` with your own IP address.
-
-If you see a ```ConnectionError``` in the frontend, wait a couple more seconds and reload the page. The backend container can take some time to finish the database setup.
-
-
-
-If you wait a couple more seconds and reload the page but it is still a ```ConnectionError``` in the frontend, please make sure the ports: `5432` and `80` are not being occupied or listened up.
-
-If you visit the frontend webpage successfully the first time but failed the next, the best way to solve it currently is to re-install docker.
-
-- #### **Step4.** Point Jetson Nano at your local server
-
-Return to your Jetson Nano's terminal, and then run the maskcam container with the command below:
-
-```shell
-sudo docker run --runtime nvidia --privileged --rm -it --env MQTT_BROKER_IP= --env MQTT_DEVICE_NAME=my-jetson-1 --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
-```
-
-
-
-**Note:** Replace `````` and `````` with your own server and Jetson Nano's IP address.
-
-After that, you can choose your device on webpage as shown below:
-
-
-
-Finally, you can see the data collected by Jetson Nano transmitting to the Server.
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: MaskCam
+title: MaskCam
+keywords:
+ - Edge
+ - reComputer Application
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /Jetson-Nano-MaskCam
+sku: 102110483, 102110484, 114110049, 102110637, 110061363, 110061401, 110061361, 110061404, B110061361, 110061481
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# Maskcam - Crowd Face Mask Usage Monitoring based on Jetson Nano
+
+## **Introduction**
+
+Due to the ravages of the COVID - 19, in many public places, we often see the requirement to wear a mask. There are usually managers at the gate of the area to observe whether people are wearing masks. Maybe it's a very simple task for humans, but if we combines it with Jetson Nano, graphics capture and edge computing with AI, it will be a very interesting and socially valuable task.
+
+MaskCam was developed by Berkeley Design Technology, Inc. (BDTI) and Tryolabs S.A., with development funded by NVIDIA. MaskCam is offered under the MIT License. For more information about MaskCam, please see the [report from BDTI](https://www.bdti.com/maskcam). If you have questions, please email BDTI at maskcam@bdti.com.
+
+In this project, we will use the [NVIDIA® Jetson Nano™ 4GB Developer Kit](https://www.seeedstudio.com/NVIDIA-Jetson-Nano-Development-Kit-B01-p-4437.html) along with other accessories. At the same time, you can choose the [A206 Carrier Board](https://www.seeedstudio.com/A206-Carrier-Board-for-Jetson-Nano-Xavier-NX-p-5132.html) from Seeed, which has the same size and functional design as NVIDIA's official carrier board, and also, it has excellent stability and versatility.
+
+## **Perparation**
+
+### **Hardware Requirement**
+
+- [NVIDIA® Jetson Nano™ 4GB Developer Kit](https://www.seeedstudio.com/NVIDIA-Jetson-Nano-Development-Kit-B01-p-4437.html) (JetPack 4.6)
+
+- [A206 Carrier Board](https://www.seeedstudio.com/A206-Carrier-Board-for-Jetson-Nano-Xavier-NX-p-5132.html)(optional)
+
+- 7-inch hdmi monitor and HDMI cable
+
+- USB Docking Station
+
+- Mouse and Keyboard
+
+- 5V 4A Power Adapter
+
+- USB Camera
+
+- Ethernet Cable
+
+- PC with Windows11 (or Windows10/Ubuntu18.04/ OSX Big Sur)
+
+### **Software Requirement**
+
+- docker
+
+- docker-compose
+
+- Video Software (Display RTSP streams,like VLC/QuickTime/PotPlayer)
+
+## **Get Started**
+
+### **Jetson Nano Setup**
+
+- #### **Step 1.** Download MaskCam container from Docker Hub
+
+```shell
+sudo docker pull maskcam/maskcam-beta
+```
+
+
+
+- #### **Step 2.** Find Jetson Nano IP Address with the command ```ifconfig```
+
+```shell
+sudo ifconfig
+```
+
+
+
+- #### **Step 3.** Start MaskCam with docker
+
+Remember to connect your Jetson Nano with a USB camera, and then, tab the command below into the terminal.
+
+```shell
+sudo docker run --runtime nvidia --privileged --rm -it --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
+```
+
+
+
+**Note:** Replace `````` with your own Jetson Nano's IP address in this command.
+
+If you don't want to use the default input device, there are also two different commands to choose and replace the command above.
+
+Use the /dev/video1 camera device:
+
+```shell
+#Use the /dev/video1 camera device
+sudo docker run --runtime nvidia --privileged --rm -it --env MASKCAM_INPUT=v4l2:///dev/video1 --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
+```
+
+Use the CSI camera device:
+
+```shell
+#Use the CSI camera device
+sudo docker run --runtime nvidia --privileged --rm -it --env MASKCAM_INPUT=v4l2://0 --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
+```
+
+- #### **Step 4.** View the live vedio stream through the ```MASKCAM_DEVICE_ADDRESS```
+
+```shell
+Streaming at rtsp://aaa.bbb.ccc.ddd:8554/maskcam
+```
+
+
+
+**Note:** ```aaa.bbb.ccc.ddd``` is the address that you provided in ```MASKCAM_DEVICE_ADDRESS``` previously.
+
+You can copy-paste that URL into your RSTP streaming viewer on another computer. In the video stream, if you are not wearing a mask, you will see a red frame on your face. Otherwise, you will see a green frame.
+
+### **MQTT Server Setup**
+
+ In addition to the basic function, it also includes the function of the remote [server](https://github.com/bdtinc/maskcam/blob/main/server) in this library which means your PC can receive statistics from the device, store them in a database, and have a web-based GUI frontend to display them.
+
+In this article, all demos about the server are based on Window11 system host, you can also find the instruction using Linux system through this article: [Maskcam](https://github.com/bdtinc/maskcam).
+
+- #### **Step1.** Install Docker and Docker-compose on your PC
+
+Download the installation package of [Docker](https://www.docker.com/) from its official website: [https://docs.docker.com/get-docker/](https://docs.docker.com/get-docker/)
+
+Note: If there exists a message that says ```WLS 2 installization is incomplete.``` in the progress of installization, click the link in the prompt box, download and install thee Linux kernel update package.
+The you can run ```docker```.
+
+- #### **Step2.** Set up build directory
+
+Run ```Windows PowerShell``` as administrator
+
+Move to the root of the drive which you will be using, such as :
+
+```shell
+cd e:\
+```
+
+Download MaskCam repo :
+
+```shell
+Invoke-WebRequest https://github.com/bdtinc/maskcam/archive/refs/heads/main.zip -OutFile e:\maskcam.zip
+```
+
+Unzip it to the path ```e:\maskcam``` :
+
+```shell
+Expand-Archive e:\maskcam.zip -DestinationPath e:\maskcam
+```
+
+
+
+Move To the maskcam server folder, which has four containers: the Mosquitto broker, backend API, database, and Streamlit frontend.
+
+```shell
+cd maskcam\maskcam-main\server
+```
+
+Then, create the ```.env``` files by copying the default templates:
+
+```shell
+cp database.env.template database.env
+cp frontend.env.template frontend.env
+cp backend.env.template backend.env
+```
+
+Open the ```database.env``` :
+
+```shell
+notepad database.env
+```
+
+Replace the ``````, ``````, and `````` fields with your own values
+
+
+
+- #### **Step3.** Build and run local server
+
+After editing the database environment file, you're ready to build all the containers and run them with a single command:
+
+```shell
+sudo docker-compose up -d
+```
+
+
+
+Next, open a web browser and enter the server IP to visit the frontend webpage:
+
+```http://:8501/```
+
+
+
+**Note:** Replace `````` with your own IP address.
+
+If you see a ```ConnectionError``` in the frontend, wait a couple more seconds and reload the page. The backend container can take some time to finish the database setup.
+
+
+
+If you wait a couple more seconds and reload the page but it is still a ```ConnectionError``` in the frontend, please make sure the ports: `5432` and `80` are not being occupied or listened up.
+
+If you visit the frontend webpage successfully the first time but failed the next, the best way to solve it currently is to re-install docker.
+
+- #### **Step4.** Point Jetson Nano at your local server
+
+Return to your Jetson Nano's terminal, and then run the maskcam container with the command below:
+
+```shell
+sudo docker run --runtime nvidia --privileged --rm -it --env MQTT_BROKER_IP= --env MQTT_DEVICE_NAME=my-jetson-1 --env MASKCAM_DEVICE_ADDRESS= -p 1883:1883 -p 8080:8080 -p 8554:8554 maskcam/maskcam-beta
+```
+
+
+
+**Note:** Replace `````` and `````` with your own server and Jetson Nano's IP address.
+
+After that, you can choose your device on webpage as shown below:
+
+
+
+Finally, you can see the data collected by Jetson Nano transmitting to the Server.
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Security_Scan.md b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Security_Scan.md
index a37d5b9d83406..5d77b5779a26c 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Security_Scan.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/Security_Scan.md
@@ -1,253 +1,251 @@
----
-description: Security Xray Scan Knife Detection
-title: Security Xray Scan Knife Detection
-keywords:
- - Edge
- - reComputer Application
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Security_Scan
-sku: 110991666, 110061363, 110061401, 110061361, 110061481
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# Knife Detection: An Object Detection Model deployed on Triton Inference Sever based on reComputer
-
-
-
-Security check is a safety alarm for the consideration of passengers and the transportation sectors, keeping danger away, usually applying in the airports, railway stations, subway stations, etc. In the existing security inspection field, security inspection machines are deployed on the inbound passages of public transportation. In general, it requires multiple devices to work at the same time.
-
-Nevertheless, the detection performance of prohibited items in X-ray images is still not ideal due to the overlapping of detected objects during the security inspection. For this matter, based on the de-occlusion module in the Triton Interface Sever, deploying a prohibited item detection algorithm in the Xray images can perform a better way.
-
-Hence, credit to [Yanlu Wei, Renshuai Tao et al.](https://arxiv.org/abs/2004.08656), we provide this fundamental project that we are going to deploy a Deep Learning model on [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) that could detect prohibited items (knives) with the Raspberry Pi and the reComputer J1010 where we use one reComputer J1010 as our inference server and two Raspberry Pi to simulate security inspection machines as sending images. The [reComputer 1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html), [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html), [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) and [Nvidia Jetson AGX Xavier](https://www.seeedstudio.com/Jetson-Xavier-AGX-H01-Kit-p-5283.html) are all supported.
-
-## Getting Started
-
-[Triton Inference Server](https://developer.nvidia.com/nvidia-triton-inference-server) provides a cloud and edge inferencing solution, optimized for both CPUs and GPUs. Triton supports an HTTP/REST and GRPC protocol that allows remote clients to request inferencing for any model being managed by the server. Here we are going to use Triton (Triton Inference Server) as our local server which will be deployed detection model.
-
-### Hardware
-
-#### Hardware Required
-
-In this project the required devices are shown as below:
-
-- [Raspberry Pi 4B](https://www.seeedstudio.com/Dual-GbE-Carrier-Board-with-4GB-RAM-32GB-eMMC-RPi-CM-4-p-4898.html)*2
-- [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)
-- HDMI-display screen, mouse and keyboard
-- PC
-
-#### Hardware Setup
-
-Two Raspberry Pi and reComputer should be powered on and all of them should be under the **same internet**. In this project, we use two Raspberry pi to simulate security machine's work since the security inspection machines are used by multiple devices in most instances. Hence, both
-
-
-
-Just one Raspberry Pi could be also applied to this project. However, simultaneous knife detection on two devices demonstration could offer better dynamic batching capabilities of the Triton Inference Server. In the next instruction, we will introduce you how to set up the software on Raspberry Pi and reComputer J1010.
-
-### Software
-
-We here use [Xray images dataset](https://drive.google.com/file/d/12moaa-ylpVu0KmUCZj_XXeA5TxZuCQ3o/view) as our **input data** which will be placed on the **Raspberry Pi**. After that, reComputer will output the processed inference results to the Raspberry Pi. In the end, the Raspberry Pi will complete the final work and display on the screen, i.e., the last layer of inference model will be deployed on the Raspberry Pi.
-
-#### Set up Raspberry Pi
-
-We here will show you how to set up required softwares on Raspberry Pi, including
-
-**Step 1.** Install the Raspbian Buster system and basic configuration from the [official website](https://www.raspberrypi.com/documentation/computers/getting-started.html#using-network-installation). In this project, we use RASPBERRY PI OS(64 bit) as our operated system.
-
-
-
-**Step 2.** Configure the Raspberry Pi SSH port (optional).
-
-Before deploying the environment, we can open the Raspberry Pi SSH port and call it remotely using the [SSH interface](https://wiki.seeedstudio.com/remote_connect/) on the PC.
-
-> Notice: make sure the PC and Raspberry Pi are under the same LAN.
-
-
-
-**Step 3.** Configure the Python environment.
-
-We need to deploy the required environments for the inference model as **Python, PyTorch, Tritonclient, and TorchVision**. and image display as **OpenCV** on the Raspberry Pi. We provide the instructions below:
-
-**Python**
-
-We can execute `python –V` and ensure the Python version is 3.9.2. We need to install PyTorch, Torchclient and TorchVision that the versions we need are corresponding to the Python version 3.9.2. You can refer to [here](https://www.python.org/downloads/) to download and install.
-
-**PyTorch**
-
-If the Python version is correct. We can now install Pytorch.
-
->Notice: Before we install Pytorch, we have to check out Raspbian version.
-
-
-
-Execute the command below to install Pytorch:
-
-```python
-# get a fresh start
-sudo apt-get update
-sudo apt-get upgrade
-
-# install the dependencies
-sudo apt-get install python3-pip libjpeg-dev libopenblas-dev libopenmpi-dev libomp-dev
-
-# above 58.3.0 you get version issues
-sudo -H pip3 install setuptools==58.3.0
-sudo -H pip3 install Cython
-
-# install gdown to download from Google drive
-sudo -H pip3 install gdown
-
-# Buster OS
-# download the wheel
-gdown https://drive.google.com/uc?id=1gAxP9q94pMeHQ1XOvLHqjEcmgyxjlY_R
-# install PyTorch 1.11.0
-sudo -H pip3 install torch-1.11.0a0+gitbc2c6ed-cp39-cp39-linux_aarch64.whl
-# clean up
-rm torch-1.11.0a0+gitbc2c6ed-cp39-cp39m-linux_aarch64.whl
-```
-
-After a successful installation, we can check PyTorch with the following commands **after initiating** `python`:
-
-```python
-import torch as tr
-print(tr.__version__)
-```
-
-
-
->Notice: PyTorch wheels for Raspberry Pi 4 can be find in [https://github.com/Qengineering/PyTorch-Raspberry-Pi-64-OS](https://github.com/Qengineering/PyTorch-Raspberry-Pi-64-OS)
-
-**Tritonclient**
-
-We can execute `pip3 install tritonclient[all]` to download Tritonclient.
-
-
-
-**TorchVision**
-
-After Pytorch was installed, we can move to the Torchvision installation. Here are the commands:
-
-```python
-# download the wheel
-gdown https://drive.google.com/uc?id=1oDsJEHoVNEXe53S9f1zEzx9UZCFWbExh
-# install torchvision 0.12.0
-sudo -H pip3 install torchvision-0.12.0a0+9b5a3fe-cp39-cp39-linux_aarch64.whl
-# clean up
-rm torchvision-0.12.0a0+9b5a3fe-cp39-cp39-linux_aarch64.whl
-```
-
-
-
-**OpenCV**
-
-We can directly execute `pip3 install opencv-python` to install OpenCV:
-
-
-
-### Set up reComputer J1010
-
-In this project, we will deploy Triton Inference Server to the reComputer J1010. In order to enhance the interactivity and deployment convenience of the trained model, we will convert the model into **ONXX format**.
-
-**Step 1.** [Install](https://wiki.seeedstudio.com/reComputer_J1010_J101_Flash_Jetpack/) Jetpack 4.6.1 into reComputer J1010.
-
-**Step 2.** Create a new folder “opi/1” in “home/server/docs/examples/model_repository ”. and then download trained and converted [model.onnx](https://drive.google.com/file/d/1RcHK_gthCXHsJLeDOUQ6c3r0RlAUgRfV/view?usp=sharing) and put it into the “1” folder.
-
-
-
->If you need another general server, you can execute the following steps.
-
-Open a new Terminal and execute
-
-```python
-git clone https://github.com/triton-inference-server/server
-cd ~/server/docs/examples
-sh fetch_models.sh
-```
-
-**Step 3.** Install the release of Triton for JetPack 4.6.1 and is provided in the attached tar file: [tritonserver2.21.0-jetpack5.0.tgz](https://github.com/triton-inference-server/server/releases/download/v2.19.0/tritonserver2.19.0-jetpack4.6.1.tgz).
-
-
-
-The tar file here contains the Triton server executable and shared libraries including the C++ and Python client libraries and examples. For more information about how to install and use Triton on JetPack you can refer to [here](https://github.com/triton-inference-server/server/blob/r22.04/docs/jetson.md).
-
-**Step 4.** Execute the following command:
-
-```python
-
-mkdir ~/TritonServer && tar -xzvf tritonserver2.19.0-jetpack4.6.1.tgz -C ~/TritonServer
-cd ~/TritonServer/bin
-./tritonserver --model-repository=/home/seeed/server/docs/examples/model_repository --backend-directory=/home/seeed/TritonServer/backends --strict-model-config=false --min-supported-compute-capability=5.3
-```
-
-
-
-Now, we have set up all the preparations.
-
-## Operating the Program
-
-Since all the required environments are deployed, we can run our project according to following steps.
-
-**Step 1.** Download model and related files.
-
-1. Clone module from GitHub.
-
-Open a new Terminal and execute:.
-
-```python
-git clone https://github.com/LemonCANDY42/Seeed_SMG_AIOT.git
-cd Seeed_SMG_AIOT/
-git clone https://github.com/LemonCANDY42/OPIXray.git
-```
-
-2. Create a new folder “weights” to store the trained weight of this algorithm “DOAM.pth”. Download the [weight file](https://files.seeedstudio.com/wiki/SecurityCheck/DOAM.pth.zip) and execute:
-
-- `cd OPIXray/DOAM`
-- `mkdir weights`
-
-
-
-3. Create a new “Dataset” folder to store the [Xray images dataset](https://drive.google.com/file/d/12moaa-ylpVu0KmUCZj_XXeA5TxZuCQ3o/view?usp=sharing).
-
-
-
-The result will be shown as the figure below:
-
-
-
-## Troubleshooting
-
-> When you luanch Triton server, you may meet following errors:
-
->1. if error with libb64.so.0d, execute:
-`sudo apt-get install libb64-0d`
-
->2. if error with error with libre2.so.2, execute:
-`sudo apt-get install libre2-dev`
-
->3. if error: creating server: Internal - failed to load all models, execute:
-`--exit-on-error=false`
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
-
+---
+description: Security Xray Scan Knife Detection
+title: Security Xray Scan Knife Detection
+keywords:
+ - Edge
+ - reComputer Application
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /Security_Scan
+sku: 110991666, 110061363, 110061401, 110061361, 110061481
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# Knife Detection: An Object Detection Model deployed on Triton Inference Sever based on reComputer
+
+
+
+Security check is a safety alarm for the consideration of passengers and the transportation sectors, keeping danger away, usually applying in the airports, railway stations, subway stations, etc. In the existing security inspection field, security inspection machines are deployed on the inbound passages of public transportation. In general, it requires multiple devices to work at the same time.
+
+Nevertheless, the detection performance of prohibited items in X-ray images is still not ideal due to the overlapping of detected objects during the security inspection. For this matter, based on the de-occlusion module in the Triton Interface Sever, deploying a prohibited item detection algorithm in the Xray images can perform a better way.
+
+Hence, credit to [Yanlu Wei, Renshuai Tao et al.](https://arxiv.org/abs/2004.08656), we provide this fundamental project that we are going to deploy a Deep Learning model on [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) that could detect prohibited items (knives) with the Raspberry Pi and the reComputer J1010 where we use one reComputer J1010 as our inference server and two Raspberry Pi to simulate security inspection machines as sending images. The [reComputer 1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html), [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html), [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) and [Nvidia Jetson AGX Xavier](https://www.seeedstudio.com/Jetson-Xavier-AGX-H01-Kit-p-5283.html) are all supported.
+
+## Getting Started
+
+[Triton Inference Server](https://developer.nvidia.com/nvidia-triton-inference-server) provides a cloud and edge inferencing solution, optimized for both CPUs and GPUs. Triton supports an HTTP/REST and GRPC protocol that allows remote clients to request inferencing for any model being managed by the server. Here we are going to use Triton (Triton Inference Server) as our local server which will be deployed detection model.
+
+### Hardware
+
+#### Hardware Required
+
+In this project the required devices are shown as below:
+
+- [Raspberry Pi 4B](https://www.seeedstudio.com/Dual-GbE-Carrier-Board-with-4GB-RAM-32GB-eMMC-RPi-CM-4-p-4898.html)*2
+- [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)
+- HDMI-display screen, mouse and keyboard
+- PC
+
+#### Hardware Setup
+
+Two Raspberry Pi and reComputer should be powered on and all of them should be under the **same internet**. In this project, we use two Raspberry pi to simulate security machine's work since the security inspection machines are used by multiple devices in most instances. Hence, both
+
+
+
+Just one Raspberry Pi could be also applied to this project. However, simultaneous knife detection on two devices demonstration could offer better dynamic batching capabilities of the Triton Inference Server. In the next instruction, we will introduce you how to set up the software on Raspberry Pi and reComputer J1010.
+
+### Software
+
+We here use [Xray images dataset](https://drive.google.com/file/d/12moaa-ylpVu0KmUCZj_XXeA5TxZuCQ3o/view) as our **input data** which will be placed on the **Raspberry Pi**. After that, reComputer will output the processed inference results to the Raspberry Pi. In the end, the Raspberry Pi will complete the final work and display on the screen, i.e., the last layer of inference model will be deployed on the Raspberry Pi.
+
+#### Set up Raspberry Pi
+
+We here will show you how to set up required softwares on Raspberry Pi, including
+
+**Step 1.** Install the Raspbian Buster system and basic configuration from the [official website](https://www.raspberrypi.com/documentation/computers/getting-started.html#using-network-installation). In this project, we use RASPBERRY PI OS(64 bit) as our operated system.
+
+
+
+**Step 2.** Configure the Raspberry Pi SSH port (optional).
+
+Before deploying the environment, we can open the Raspberry Pi SSH port and call it remotely using the [SSH interface](https://wiki.seeedstudio.com/remote_connect/) on the PC.
+
+> Notice: make sure the PC and Raspberry Pi are under the same LAN.
+
+
+
+**Step 3.** Configure the Python environment.
+
+We need to deploy the required environments for the inference model as **Python, PyTorch, Tritonclient, and TorchVision**. and image display as **OpenCV** on the Raspberry Pi. We provide the instructions below:
+
+**Python**
+
+We can execute `python –V` and ensure the Python version is 3.9.2. We need to install PyTorch, Torchclient and TorchVision that the versions we need are corresponding to the Python version 3.9.2. You can refer to [here](https://www.python.org/downloads/) to download and install.
+
+**PyTorch**
+
+If the Python version is correct. We can now install Pytorch.
+
+>Notice: Before we install Pytorch, we have to check out Raspbian version.
+
+
+
+Execute the command below to install Pytorch:
+
+```python
+# get a fresh start
+sudo apt-get update
+sudo apt-get upgrade
+
+# install the dependencies
+sudo apt-get install python3-pip libjpeg-dev libopenblas-dev libopenmpi-dev libomp-dev
+
+# above 58.3.0 you get version issues
+sudo -H pip3 install setuptools==58.3.0
+sudo -H pip3 install Cython
+
+# install gdown to download from Google drive
+sudo -H pip3 install gdown
+
+# Buster OS
+# download the wheel
+gdown https://drive.google.com/uc?id=1gAxP9q94pMeHQ1XOvLHqjEcmgyxjlY_R
+# install PyTorch 1.11.0
+sudo -H pip3 install torch-1.11.0a0+gitbc2c6ed-cp39-cp39-linux_aarch64.whl
+# clean up
+rm torch-1.11.0a0+gitbc2c6ed-cp39-cp39m-linux_aarch64.whl
+```
+
+After a successful installation, we can check PyTorch with the following commands **after initiating** `python`:
+
+```python
+import torch as tr
+print(tr.__version__)
+```
+
+
+
+>Notice: PyTorch wheels for Raspberry Pi 4 can be find in [https://github.com/Qengineering/PyTorch-Raspberry-Pi-64-OS](https://github.com/Qengineering/PyTorch-Raspberry-Pi-64-OS)
+
+**Tritonclient**
+
+We can execute `pip3 install tritonclient[all]` to download Tritonclient.
+
+
+
+**TorchVision**
+
+After Pytorch was installed, we can move to the Torchvision installation. Here are the commands:
+
+```python
+# download the wheel
+gdown https://drive.google.com/uc?id=1oDsJEHoVNEXe53S9f1zEzx9UZCFWbExh
+# install torchvision 0.12.0
+sudo -H pip3 install torchvision-0.12.0a0+9b5a3fe-cp39-cp39-linux_aarch64.whl
+# clean up
+rm torchvision-0.12.0a0+9b5a3fe-cp39-cp39-linux_aarch64.whl
+```
+
+
+
+**OpenCV**
+
+We can directly execute `pip3 install opencv-python` to install OpenCV:
+
+
+
+### Set up reComputer J1010
+
+In this project, we will deploy Triton Inference Server to the reComputer J1010. In order to enhance the interactivity and deployment convenience of the trained model, we will convert the model into **ONXX format**.
+
+**Step 1.** [Install](https://wiki.seeedstudio.com/reComputer_J1010_J101_Flash_Jetpack/) Jetpack 4.6.1 into reComputer J1010.
+
+**Step 2.** Create a new folder “opi/1” in “home/server/docs/examples/model_repository ”. and then download trained and converted [model.onnx](https://drive.google.com/file/d/1RcHK_gthCXHsJLeDOUQ6c3r0RlAUgRfV/view?usp=sharing) and put it into the “1” folder.
+
+
+
+>If you need another general server, you can execute the following steps.
+
+Open a new Terminal and execute
+
+```python
+git clone https://github.com/triton-inference-server/server
+cd ~/server/docs/examples
+sh fetch_models.sh
+```
+
+**Step 3.** Install the release of Triton for JetPack 4.6.1 and is provided in the attached tar file: [tritonserver2.21.0-jetpack5.0.tgz](https://github.com/triton-inference-server/server/releases/download/v2.19.0/tritonserver2.19.0-jetpack4.6.1.tgz).
+
+
+
+The tar file here contains the Triton server executable and shared libraries including the C++ and Python client libraries and examples. For more information about how to install and use Triton on JetPack you can refer to [here](https://github.com/triton-inference-server/server/blob/r22.04/docs/jetson.md).
+
+**Step 4.** Execute the following command:
+
+```python
+
+mkdir ~/TritonServer && tar -xzvf tritonserver2.19.0-jetpack4.6.1.tgz -C ~/TritonServer
+cd ~/TritonServer/bin
+./tritonserver --model-repository=/home/seeed/server/docs/examples/model_repository --backend-directory=/home/seeed/TritonServer/backends --strict-model-config=false --min-supported-compute-capability=5.3
+```
+
+
+
+Now, we have set up all the preparations.
+
+## Operating the Program
+
+Since all the required environments are deployed, we can run our project according to following steps.
+
+**Step 1.** Download model and related files.
+
+1. Clone module from GitHub.
+
+Open a new Terminal and execute:.
+
+```python
+git clone https://github.com/LemonCANDY42/Seeed_SMG_AIOT.git
+cd Seeed_SMG_AIOT/
+git clone https://github.com/LemonCANDY42/OPIXray.git
+```
+
+2. Create a new folder “weights” to store the trained weight of this algorithm “DOAM.pth”. Download the [weight file](https://files.seeedstudio.com/wiki/SecurityCheck/DOAM.pth.zip) and execute:
+
+- `cd OPIXray/DOAM`
+- `mkdir weights`
+
+
+
+3. Create a new “Dataset” folder to store the [Xray images dataset](https://drive.google.com/file/d/12moaa-ylpVu0KmUCZj_XXeA5TxZuCQ3o/view?usp=sharing).
+
+
+
+The result will be shown as the figure below:
+
+
+
+## Troubleshooting
+
+> When you luanch Triton server, you may meet following errors:
+
+>1. if error with libb64.so.0d, execute:
+`sudo apt-get install libb64-0d`
+
+>2. if error with error with libre2.so.2, execute:
+`sudo apt-get install libre2-dev`
+
+>3. if error: creating server: Internal - failed to load all models, execute:
+`--exit-on-error=false`
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-## Overview
-
-As cities are growing day-by-day, so is the number of vehicles on the roads. Because of this, the traffic congestion also grows rapidly and this in turn can heavily impact on the development of a country. This wiki proposes a solution for this issue using AI vision. The streaming video from already depolyed CCTV cameras at every traffic light can be captured, perform object detection to detect all the vehicles and then control the traffic lights according to the vehicle congestion. Furthermore this data can be sent to a database along with the vehicle make and the number of pedestrians for further analysis.
-
-For this AI vision application, we will use DeepStream SDK by NVIDIA and perform inference at the edge on an NVIDIA Jetson device. Also, we will use a pre-trained model for this task from [NVIDIA NGC Model Catalog](https://catalog.ngc.nvidia.com/models) to make the deployment process fast and easy. NVIDIA NGC Model Catalog provides a large number of pre-trained models for many other different applications as well.
-
-## What is DeepStream SDK?
-
-NVIDIA’s [DeepStream SDK](https://developer.nvidia.com/deepstream-sdk) delivers a complete streaming analytics toolkit for AI-based multi-sensor processing, video, audio and image understanding. DeepStream brings development flexibility by giving developers the option to develop in C/C++,Python, or use low-code graphical programming with Graph Composer. DeepStream ships with various hardware accelerated plugins and extensions.
-
-
-
-DeepStream is built for both developers and enterprises and offers extensive AI model support for popular object detection and segmentation models such as state of the art SSD, YOLO, FasterRCNN, and MaskRCNN. You can also integrate custom functions and libraries in DeepStream.
-
-Deepstream offers the flexibility from rapid prototyping to full production level solutions. It also allows you to choose your inference path. With native integration to NVIDIA Triton Inference Server, you can deploy models in native frameworks such as PyTorch and TensorFlow for inference. Using NVIDIA TensorRT for high throughput inference with options for multi-GPU, multi-stream and batching support option, you can achieve the best possible performance.
-
-## Hardware supported
-
-DeepStream SDK is supported by the following hardware:
-
-- Kits by Seeed:
-
- - reComputer J1010 built with Jetson Nano
- - reComputer J1020 built with Jetson Nano
- - reComputer J2011 built with Jetson Xavier NX 8GB
- - reComputer J2012 built with Jetson Xavier NX 16GB
-
-- Carrier Boards by Seeed:
-
- - Jetson Mate
- - Jetson SUB Mini PC
- - Jetson Xavier AGX H01 Kit
- - A203 Carrier Board
- - A203 (Version 2) Carrier Board
- - A205 Carrier Board
- - A206 Carrier Board
-
-- Official Development Kits by NVIDIA:
-
- - NVIDIA® Jetson Nano Developer Kit
- - NVIDIA® Jetson Xavier NX Developer Kit
- - NVIDIA® Jetson AGX Xavier Developer Kit
- - NVIDIA® Jetson TX2 Developer Kit
- - NVIDIA® Jetson AGX Orin Developer Kit
-
-- Official SoMs by NVIDIA:
-
- - NVIDIA® Jetson Nano module
- - NVIDIA® Jetson Xavier NX module
- - NVIDIA® Jetson TX2 NX module
- - NVIDIA® Jetson TX2 module
- - NVIDIA® Jetson AGX Xavier module
-
-## Prerequisites
-
-- Any of the above Jetson devices running JetPack
-- Keyboard and HDMI display
-- Host PC with Windows, Linux or Mac
-- USB webcam or MIPI CSI camera supported by your Jetson device
-
-## Getting started
-
-Here we will use [DashCamNet model](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/dashcamnet) which acts as the primary detector, detecting the objects of interest and for each detected car the [VehicleTypeNet model](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/vehicletypenet) and [VehicleMakeNet model](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/vehiclemakenet) act as secondary classifiers determining the type of the car and the make of the car respectively. VehicleTypeNet classifies the following: coupe, sedan, SUV, van, large vehicle and truck. Whereas VehicleMakeNet classifies following cars: Acura, Audi, BMW, Chevrolet, Chrysler, Dodge, Ford, GMC, Honda, Hyundai, Infiniti, Jeep, Kia, Lexus, Mazda, Mercedes, Nissan, Subaru, Toyota, and Volkswagen.
-
-> The below workflow is tested on a [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html) running [JetPack 4.6.1](https://developer.nvidia.com/embedded/jetpack-sdk-461)
-
-**Step 1:** Make sure you have properly installed all the **SDK Components** and **DeepStream SDK** on the Jetson device. (check [this wiki](https://wiki.seeedstudio.com/reComputer_J1020_A206_Flash_JetPack/) for a reference on installation)
-
-**Note:** It is recommended to use **NVIDIA SDK Manager** to install all the SDK components and DeepStream SDK
-
-**Step 2:** Download the configuration files
-
-```sh
-git clone https://github.com/NVIDIA-AI-IOT/deepstream_reference_apps.git
-cd deepstream_reference_apps/deepstream_app_tao_configs/
-sudo cp -a * /opt/nvidia/deepstream/deepstream/samples/configs/tao_pretrained_models/
-```
-
-**Step 3:** Download the models
-
-```sh
-sudo apt install -y wget zip
-cd /opt/nvidia/deepstream/deepstream/samples/configs/tao_pretrained_models/
-sudo ./download_models.sh
-```
-
-**Step 4:** Open **deepstream_app_source1_dashcamnet_vehiclemakenet_vehicletypenet.txt**
-
-```sh
-vi deepstream_app_source1_dashcamnet_vehiclemakenet_vehicletypenet.txt
-```
-
-**Step 5:** Change **sync=1** to **sync=0** under [sink0]
-
-```sh
-[sink0]
-enable=1
-#Type - 1=FakeSink 2=EglSink 3=File
-type=2
-sync=0
-source-id=0
-gpu-id=0
-```
-
-**Step 6:** Under [primary-gie], change model-engine-file to **../../models/tao_pretrained_models/dashcamnet/resnet18_dashcamnet_pruned.etlt_b1_gpu0_fp16.engine**
-
-```sh
-[primary-gie]
-enable=1
-gpu-id=0
-# Modify as necessary
-model-engine-file=../../models/tao_pretrained_models/dashcamnet/resnet18_dashcamnet_pruned.etlt_b1_gpu0_fp16.engine
-batch-size=1
-#Required by the app for OSD, not a plugin property
-bbox-border-color0=1;0;0;1
-bbox-border-color1=0;1;1;1
-bbox-border-color2=0;0;1;1
-bbox-border-color3=0;1;0;1
-gie-unique-id=1
-config-file=config_infer_primary_dashcamnet.txt
-```
-
-**Step 7:** Under [secondary-gie0], change model-engine-file to **../../models/tao_pretrained_models/vehiclemakenet/resnet18_vehiclemakenet_pruned.etlt_b4_gpu0_fp16.engine**
-
-```sh
-[secondary-gie0]
-enable=1
-model-engine-file=../../models/tao_pretrained_models/vehiclemakenet/resnet18_vehiclemakenet_pruned.etlt_b4_gpu0_fp16.engine
-gpu-id=0
-batch-size=4
-gie-unique-id=4
-operate-on-gie-id=1
-operate-on-class-ids=0;
-config-file=config_infer_secondary_vehiclemakenet.txt
-```
-
-**Step 8:** Under [secondary-gie1], change model-engine-file to **../../models/tao_pretrained_models/vehicletypenet/resnet18_vehicletypenet_pruned.etlt_b4_gpu0_fp16.engine**
-
-```sh
-[secondary-gie1]
-enable=1
-model-engine-file=../../models/tao_pretrained_models/vehicletypenet/resnet18_vehicletypenet_pruned.etlt_b4_gpu0_fp16.engine
-gpu-id=0
-batch-size=4
-gie-unique-id=5
-operate-on-gie-id=1
-operate-on-class-ids=0;
-config-file=config_infer_secondary_vehicletypenet.txt
-```
-
-**Step 9:** Connect camera, keyboard, HDMI display to Jetson device and execute the following
-
-```sh
-sudo deepstream-app -c deepstream_app_source1_dashcamnet_vehiclemakenet_vehicletypenet.txt
-```
-
-Now you can visualize the demo on the connected HDMI display as follows
-
-
-
-If you want to try other demos available under **/opt/nvidia/deepstream/deepstream/samples/configs/tao_pretrained_models/**, you can simply run them as follows
-
-```sh
-sudo deepstream-app -c deepstream_app_source1_$MODEL.txt
-```
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+## Overview
+
+As cities are growing day-by-day, so is the number of vehicles on the roads. Because of this, the traffic congestion also grows rapidly and this in turn can heavily impact on the development of a country. This wiki proposes a solution for this issue using AI vision. The streaming video from already depolyed CCTV cameras at every traffic light can be captured, perform object detection to detect all the vehicles and then control the traffic lights according to the vehicle congestion. Furthermore this data can be sent to a database along with the vehicle make and the number of pedestrians for further analysis.
+
+For this AI vision application, we will use DeepStream SDK by NVIDIA and perform inference at the edge on an NVIDIA Jetson device. Also, we will use a pre-trained model for this task from [NVIDIA NGC Model Catalog](https://catalog.ngc.nvidia.com/models) to make the deployment process fast and easy. NVIDIA NGC Model Catalog provides a large number of pre-trained models for many other different applications as well.
+
+## What is DeepStream SDK?
+
+NVIDIA’s [DeepStream SDK](https://developer.nvidia.com/deepstream-sdk) delivers a complete streaming analytics toolkit for AI-based multi-sensor processing, video, audio and image understanding. DeepStream brings development flexibility by giving developers the option to develop in C/C++,Python, or use low-code graphical programming with Graph Composer. DeepStream ships with various hardware accelerated plugins and extensions.
+
+
+
+DeepStream is built for both developers and enterprises and offers extensive AI model support for popular object detection and segmentation models such as state of the art SSD, YOLO, FasterRCNN, and MaskRCNN. You can also integrate custom functions and libraries in DeepStream.
+
+Deepstream offers the flexibility from rapid prototyping to full production level solutions. It also allows you to choose your inference path. With native integration to NVIDIA Triton Inference Server, you can deploy models in native frameworks such as PyTorch and TensorFlow for inference. Using NVIDIA TensorRT for high throughput inference with options for multi-GPU, multi-stream and batching support option, you can achieve the best possible performance.
+
+## Hardware supported
+
+DeepStream SDK is supported by the following hardware:
+
+- Kits by Seeed:
+
+ - reComputer J1010 built with Jetson Nano
+ - reComputer J1020 built with Jetson Nano
+ - reComputer J2011 built with Jetson Xavier NX 8GB
+ - reComputer J2012 built with Jetson Xavier NX 16GB
+
+- Carrier Boards by Seeed:
+
+ - Jetson Mate
+ - Jetson SUB Mini PC
+ - Jetson Xavier AGX H01 Kit
+ - A203 Carrier Board
+ - A203 (Version 2) Carrier Board
+ - A205 Carrier Board
+ - A206 Carrier Board
+
+- Official Development Kits by NVIDIA:
+
+ - NVIDIA® Jetson Nano Developer Kit
+ - NVIDIA® Jetson Xavier NX Developer Kit
+ - NVIDIA® Jetson AGX Xavier Developer Kit
+ - NVIDIA® Jetson TX2 Developer Kit
+ - NVIDIA® Jetson AGX Orin Developer Kit
+
+- Official SoMs by NVIDIA:
+
+ - NVIDIA® Jetson Nano module
+ - NVIDIA® Jetson Xavier NX module
+ - NVIDIA® Jetson TX2 NX module
+ - NVIDIA® Jetson TX2 module
+ - NVIDIA® Jetson AGX Xavier module
+
+## Prerequisites
+
+- Any of the above Jetson devices running JetPack
+- Keyboard and HDMI display
+- Host PC with Windows, Linux or Mac
+- USB webcam or MIPI CSI camera supported by your Jetson device
+
+## Getting started
+
+Here we will use [DashCamNet model](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/dashcamnet) which acts as the primary detector, detecting the objects of interest and for each detected car the [VehicleTypeNet model](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/vehicletypenet) and [VehicleMakeNet model](https://catalog.ngc.nvidia.com/orgs/nvidia/teams/tao/models/vehiclemakenet) act as secondary classifiers determining the type of the car and the make of the car respectively. VehicleTypeNet classifies the following: coupe, sedan, SUV, van, large vehicle and truck. Whereas VehicleMakeNet classifies following cars: Acura, Audi, BMW, Chevrolet, Chrysler, Dodge, Ford, GMC, Honda, Hyundai, Infiniti, Jeep, Kia, Lexus, Mazda, Mercedes, Nissan, Subaru, Toyota, and Volkswagen.
+
+> The below workflow is tested on a [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html) running [JetPack 4.6.1](https://developer.nvidia.com/embedded/jetpack-sdk-461)
+
+**Step 1:** Make sure you have properly installed all the **SDK Components** and **DeepStream SDK** on the Jetson device. (check [this wiki](https://wiki.seeedstudio.com/reComputer_J1020_A206_Flash_JetPack/) for a reference on installation)
+
+**Note:** It is recommended to use **NVIDIA SDK Manager** to install all the SDK components and DeepStream SDK
+
+**Step 2:** Download the configuration files
+
+```sh
+git clone https://github.com/NVIDIA-AI-IOT/deepstream_reference_apps.git
+cd deepstream_reference_apps/deepstream_app_tao_configs/
+sudo cp -a * /opt/nvidia/deepstream/deepstream/samples/configs/tao_pretrained_models/
+```
+
+**Step 3:** Download the models
+
+```sh
+sudo apt install -y wget zip
+cd /opt/nvidia/deepstream/deepstream/samples/configs/tao_pretrained_models/
+sudo ./download_models.sh
+```
+
+**Step 4:** Open **deepstream_app_source1_dashcamnet_vehiclemakenet_vehicletypenet.txt**
+
+```sh
+vi deepstream_app_source1_dashcamnet_vehiclemakenet_vehicletypenet.txt
+```
+
+**Step 5:** Change **sync=1** to **sync=0** under [sink0]
+
+```sh
+[sink0]
+enable=1
+#Type - 1=FakeSink 2=EglSink 3=File
+type=2
+sync=0
+source-id=0
+gpu-id=0
+```
+
+**Step 6:** Under [primary-gie], change model-engine-file to **../../models/tao_pretrained_models/dashcamnet/resnet18_dashcamnet_pruned.etlt_b1_gpu0_fp16.engine**
+
+```sh
+[primary-gie]
+enable=1
+gpu-id=0
+# Modify as necessary
+model-engine-file=../../models/tao_pretrained_models/dashcamnet/resnet18_dashcamnet_pruned.etlt_b1_gpu0_fp16.engine
+batch-size=1
+#Required by the app for OSD, not a plugin property
+bbox-border-color0=1;0;0;1
+bbox-border-color1=0;1;1;1
+bbox-border-color2=0;0;1;1
+bbox-border-color3=0;1;0;1
+gie-unique-id=1
+config-file=config_infer_primary_dashcamnet.txt
+```
+
+**Step 7:** Under [secondary-gie0], change model-engine-file to **../../models/tao_pretrained_models/vehiclemakenet/resnet18_vehiclemakenet_pruned.etlt_b4_gpu0_fp16.engine**
+
+```sh
+[secondary-gie0]
+enable=1
+model-engine-file=../../models/tao_pretrained_models/vehiclemakenet/resnet18_vehiclemakenet_pruned.etlt_b4_gpu0_fp16.engine
+gpu-id=0
+batch-size=4
+gie-unique-id=4
+operate-on-gie-id=1
+operate-on-class-ids=0;
+config-file=config_infer_secondary_vehiclemakenet.txt
+```
+
+**Step 8:** Under [secondary-gie1], change model-engine-file to **../../models/tao_pretrained_models/vehicletypenet/resnet18_vehicletypenet_pruned.etlt_b4_gpu0_fp16.engine**
+
+```sh
+[secondary-gie1]
+enable=1
+model-engine-file=../../models/tao_pretrained_models/vehicletypenet/resnet18_vehicletypenet_pruned.etlt_b4_gpu0_fp16.engine
+gpu-id=0
+batch-size=4
+gie-unique-id=5
+operate-on-gie-id=1
+operate-on-class-ids=0;
+config-file=config_infer_secondary_vehicletypenet.txt
+```
+
+**Step 9:** Connect camera, keyboard, HDMI display to Jetson device and execute the following
+
+```sh
+sudo deepstream-app -c deepstream_app_source1_dashcamnet_vehiclemakenet_vehicletypenet.txt
+```
+
+Now you can visualize the demo on the connected HDMI display as follows
+
+
+
+If you want to try other demos available under **/opt/nvidia/deepstream/deepstream/samples/configs/tao_pretrained_models/**, you can simply run them as follows
+
+```sh
+sudo deepstream-app -c deepstream_app_source1_$MODEL.txt
+```
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Projects.md b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Projects.md
index 64198215ef346..59c8857185772 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Projects.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Projects.md
@@ -1,42 +1,40 @@
----
-description: Jetson Community Projects
-title: Jetson Community Projects
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Series_Projects
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# Projects for Jetson
-
-Explore exciting projects created by Jetson players to find inspiration, learning experiences and spark your creativity.
-
-
-
-
-
-
-
-
-
Jetson Community Project Gallery
Jetson's community project gallery offers a ton of amazing work, and more importantly. You can also showcase your own Jetson masterpieces here. Go now >
-
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: Jetson Community Projects
+title: Jetson Community Projects
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Series_Projects
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# Projects for Jetson
+
+Explore exciting projects created by Jetson players to find inspiration, learning experiences and spark your creativity.
+
+
+
+
+
+
+
+
+
Jetson Community Project Gallery
Jetson's community project gallery offers a ton of amazing work, and more importantly. You can also showcase your own Jetson masterpieces here. Go now >
+
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Tutorials_Exercise.md b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Tutorials_Exercise.md
index 6c46990a6fe5e..e2aa4e6e4f7da 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Tutorials_Exercise.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Computer_Vision/reComputer_Jetson_Series_Tutorials_Exercise.md
@@ -1,92 +1,90 @@
----
-description: reComputer for Jetson Tutorials and Exercise
-title: reComputer for Jetson Tutorials and Exercise
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Series_Tutorials_Exercise
-sku: E24010131
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# reComputer for Jetson Tutorials and Exercises
-
-The best way to learn is through exercise. We have assembled a collection of tutorials and exercises for starters here. Meanwhile, we will introduce the latest developer innovations as well for your further projects.
-
-## Tutorial
-
-Check out the [Official Jetson Tutorials](https://developer.nvidia.com/embedded/learn/tutorials) page for comprehensive educational videos on how to develop with Jetson. Here we have provided some tutorials we think are suitable for reComputer starters, including:
-
-### [Building video AI based on Jetson Nano's end-side application](https://courses.nvidia.com/courses/course-v1:DLI+S-IV-02+V2-EN/)
-
-
-
-
-Learn to develop video analytics applications with the NVIDIA DeepStream SDK to gain meaningful insights through AI-based video understanding.
-
----
-
-## [Jetson AI courses and certifications](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#course_outline)
-
-NVIDIA's Deep Learning Institute (DLI) provides developers, educators, students, and lifelong learners with practical, hands-on training and certification in edge computing. It's a great way to gain the critical AI skills you need to thrive and advance in your career. After completing these free open source courses, you can even earn a certificate to demonstrate your understanding of Jetson and AI. [Get started](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#course_outline)
-
----
-
-### [Part 1 - NVIDIA Deep Learning Institute's Introductory AI Course on Jetson Nano](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#collapseTwo)
-
-
-
-
-*In this course, you will use Jupyter notebooks on your own Jetson Nano to build deep learning classification and regression projects with computer vision models.*
-
----
-
-### [Part 2 - JetBot](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#collapseThree) (optional)
-
-
-
-
-*[JetBot](https://github.com/NVIDIA-AI-IOT/jetbot) is an open source AI robotics platform that provides makers, students and enthusiasts with everything they need to build creative, fun, intelligent AI applications.*
-
----
-
-### [Part 3 - Hello AI World](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#collapseFour)
-
-
-
-
-*[Hello AI World](https://github.com/dusty-nv/jetson-inference) is a great way to get started with Jetson and experience the capabilities of AI. In just a few hours, you can get a set of deep learning inference demos up and running on the Jetson Developer Kit for real-time image classification, object detection, and segmentation using the JetPack SDK™ and NVIDIA TensorRT™. You can also use PyTorch to collect your own datasets and train your own DNN models on Jetson.*
-
----
-
-## [Apply AI on Jetson Nano](https://courses.nvidia.com/courses/course-v1:DLI+S-RX-02+V2/about)
-
-
-
-
-In this tutorial, you will use the Jupyter iPython on your own Jetson Nano to build a deep learning classification project with a computer vision model. [Get started](https://courses.nvidia.com/courses/course-v1:DLI+S-RX-02+V2/about)
-
----
-
-## [Building Edge Computing applications for Video with Jetson Nano](https://courses.nvidia.com/courses/course-v1:DLI+S-IV-02+V2/)
-
-
-
-
-This course will guide you through the basic concepts of implementing the [NVIDIA DeepStream SDK](https://developer.nvidia.com/deepstream-sdk)'s plug-and-play architecture for streaming analytics on your own NVIDIA® Jetson Nano.
-
-## Tech Support & Product Discussion
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
+---
+description: reComputer for Jetson Tutorials and Exercise
+title: reComputer for Jetson Tutorials and Exercise
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Series_Tutorials_Exercise
+sku: E24010131
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# reComputer for Jetson Tutorials and Exercises
+
+The best way to learn is through exercise. We have assembled a collection of tutorials and exercises for starters here. Meanwhile, we will introduce the latest developer innovations as well for your further projects.
+
+## Tutorial
+
+Check out the [Official Jetson Tutorials](https://developer.nvidia.com/embedded/learn/tutorials) page for comprehensive educational videos on how to develop with Jetson. Here we have provided some tutorials we think are suitable for reComputer starters, including:
+
+### [Building video AI based on Jetson Nano's end-side application](https://courses.nvidia.com/courses/course-v1:DLI+S-IV-02+V2-EN/)
+
+
+
+
+Learn to develop video analytics applications with the NVIDIA DeepStream SDK to gain meaningful insights through AI-based video understanding.
+
+---
+
+## [Jetson AI courses and certifications](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#course_outline)
+
+NVIDIA's Deep Learning Institute (DLI) provides developers, educators, students, and lifelong learners with practical, hands-on training and certification in edge computing. It's a great way to gain the critical AI skills you need to thrive and advance in your career. After completing these free open source courses, you can even earn a certificate to demonstrate your understanding of Jetson and AI. [Get started](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#course_outline)
+
+---
+
+### [Part 1 - NVIDIA Deep Learning Institute's Introductory AI Course on Jetson Nano](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#collapseTwo)
+
+
+
+
+*In this course, you will use Jupyter notebooks on your own Jetson Nano to build deep learning classification and regression projects with computer vision models.*
+
+---
+
+### [Part 2 - JetBot](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#collapseThree) (optional)
+
+
+
+
+*[JetBot](https://github.com/NVIDIA-AI-IOT/jetbot) is an open source AI robotics platform that provides makers, students and enthusiasts with everything they need to build creative, fun, intelligent AI applications.*
+
+---
+
+### [Part 3 - Hello AI World](https://developer.nvidia.com/embedded/learn/jetson-ai-certification-programs#collapseFour)
+
+
+
+
+*[Hello AI World](https://github.com/dusty-nv/jetson-inference) is a great way to get started with Jetson and experience the capabilities of AI. In just a few hours, you can get a set of deep learning inference demos up and running on the Jetson Developer Kit for real-time image classification, object detection, and segmentation using the JetPack SDK™ and NVIDIA TensorRT™. You can also use PyTorch to collect your own datasets and train your own DNN models on Jetson.*
+
+---
+
+## [Apply AI on Jetson Nano](https://courses.nvidia.com/courses/course-v1:DLI+S-RX-02+V2/about)
+
+
+
+
+In this tutorial, you will use the Jupyter iPython on your own Jetson Nano to build a deep learning classification project with a computer vision model. [Get started](https://courses.nvidia.com/courses/course-v1:DLI+S-RX-02+V2/about)
+
+---
+
+## [Building Edge Computing applications for Video with Jetson Nano](https://courses.nvidia.com/courses/course-v1:DLI+S-IV-02+V2/)
+
+
+
+
+This course will guide you through the basic concepts of implementing the [NVIDIA DeepStream SDK](https://developer.nvidia.com/deepstream-sdk)'s plug-and-play architecture for streaming analytics on your own NVIDIA® Jetson Nano.
+
+## Tech Support & Product Discussion
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
\ No newline at end of file
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Develop_reComputer_Jetson_using_Clawdbot.md b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Develop_reComputer_Jetson_using_Clawdbot.md
index 11f8f38b4171e..5932274c7797a 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Develop_reComputer_Jetson_using_Clawdbot.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Develop_reComputer_Jetson_using_Clawdbot.md
@@ -1,4 +1,4 @@
----
+---
description: This wiki shows how to deploy and use Clawdbot on reComputer Jetson.
title: Develop reComputer Jetson using Clawdbot
keywords:
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Jetson-AI-developer-tools.md b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Jetson-AI-developer-tools.md
index dd08587dc69c4..7759b396491fd 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Jetson-AI-developer-tools.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/Jetson-AI-developer-tools.md
@@ -1,84 +1,82 @@
----
-description: Jetson AI Developer Tools
-title: Jetson AI Developer Tools
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Jetson-AI-developer-tools
-last_update:
- date: 05/11/2023
- author: Lakshantha
-
-no_comments: false # for Disqus
-
----
-
-# Jetson AI Developer Tools
-
-Deploying an AI idea can be faster, flexible, and even scalable for everyone. Seeed for Jetson Platform targets on helping educators, developers and enterprises deploy ML in the real world. By consolidating Seeed’s best-in-class hardware, cutting-edge technology from our software partners and all developers from the community, we aim at emerging all kinds of AI scenarios in our open-source platform to faster industry digital transformation. We are looking for partners to join our ecosystem together to deliver solutions to different industries together. Please send an email to edgeai@seeed.cc for more partnership ecosystem information.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
CVEDIA-RT CVEDIA-RT is a modular, cross-platform AI inference engine that provides solid foundations for building decision support systems. It's designed from the ground-up with developers and integrators in mind, providing both high and low-level interfaces. Learn more > Getting Started with CVEDIA-RT on NVIDIA® Jetson Devices >
YOLOv8 Ultralytics YOLOv8 is a cutting-edge, state-of-the-art (SOTA) model that builds upon the success of previous YOLO versions and introduces new features and improvements to further boost performance and flexibility. YOLOv8 is designed to be fast, accurate, and easy to use, making it an excellent choice for a wide range of object detection and tracking, instance segmentation, image classification and pose estimation tasks. Learn more > Deploy YOLOv8 on NVIDIA Jetson using TensorRT and DeepStream SDK >
-
-
-
-
YOLOv5 YOLO is an abbreviation for the term ‘You Only Look Once’. It is an algorithm that detects and recognizes various objects in an image in real-time. YOLOv5 🚀 is a family of compound-scaled object detection models trained on the COCO dataset, and includes simple functionality for Test Time Augmentation (TTA), model ensembling, hyperparameter evolution, and export to ONNX, CoreML and TFLite. Learn more > Few-Shot Object Detection with YOLOv5 and Roboflow >
Allxon Allxon is an essential edge device management solution that simplifies and optimizes business operations management by bonding together the AI/IoT ecosystem: hardware (IHV), software (ISV), and service providers (SI/MSP). Allxon enables efficient and secure remote hardware management services for the NVIDIA Jetson platform. Learn more > Getting Started with Allxon >
Edge Impulse Edge Impulse is the leading development platform for machine learning on edge devices, free for developers and trusted by enterprises. Accelerate ML solution development using low-code to advanced integrations with the support from an expert. Learn more > Hard Hat Detection with Edge Impulse >
-
-
-
-
Cochl.Sense Cochl.Sense allows computers to understand sounds with machine listening technologies. With advanced audio processing and neural network techniques, it provides noise-robust and environment-independent machine listening. Just input your audio data (either file or stream) into Cochl.Sense, and it will detect and return what kind of the input sound is. It can be used on any device, any platform (smart speakers, IP cameras, etc.). Learn more > Getting Started with Cochl.Sense on NVIDIA® Jetson Devices >
-
-
-
-
-## Tech Support & Product Discussion
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: Jetson AI Developer Tools
+title: Jetson AI Developer Tools
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /Jetson-AI-developer-tools
+last_update:
+ date: 05/11/2023
+ author: Lakshantha
+no_comments: false # for Disqus
+---
+
+# Jetson AI Developer Tools
+
+Deploying an AI idea can be faster, flexible, and even scalable for everyone. Seeed for Jetson Platform targets on helping educators, developers and enterprises deploy ML in the real world. By consolidating Seeed’s best-in-class hardware, cutting-edge technology from our software partners and all developers from the community, we aim at emerging all kinds of AI scenarios in our open-source platform to faster industry digital transformation. We are looking for partners to join our ecosystem together to deliver solutions to different industries together. Please send an email to edgeai@seeed.cc for more partnership ecosystem information.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
CVEDIA-RT CVEDIA-RT is a modular, cross-platform AI inference engine that provides solid foundations for building decision support systems. It's designed from the ground-up with developers and integrators in mind, providing both high and low-level interfaces. Learn more > Getting Started with CVEDIA-RT on NVIDIA® Jetson Devices >
YOLOv8 Ultralytics YOLOv8 is a cutting-edge, state-of-the-art (SOTA) model that builds upon the success of previous YOLO versions and introduces new features and improvements to further boost performance and flexibility. YOLOv8 is designed to be fast, accurate, and easy to use, making it an excellent choice for a wide range of object detection and tracking, instance segmentation, image classification and pose estimation tasks. Learn more > Deploy YOLOv8 on NVIDIA Jetson using TensorRT and DeepStream SDK >
+
+
+
+
YOLOv5 YOLO is an abbreviation for the term ‘You Only Look Once’. It is an algorithm that detects and recognizes various objects in an image in real-time. YOLOv5 🚀 is a family of compound-scaled object detection models trained on the COCO dataset, and includes simple functionality for Test Time Augmentation (TTA), model ensembling, hyperparameter evolution, and export to ONNX, CoreML and TFLite. Learn more > Few-Shot Object Detection with YOLOv5 and Roboflow >
Allxon Allxon is an essential edge device management solution that simplifies and optimizes business operations management by bonding together the AI/IoT ecosystem: hardware (IHV), software (ISV), and service providers (SI/MSP). Allxon enables efficient and secure remote hardware management services for the NVIDIA Jetson platform. Learn more > Getting Started with Allxon >
Edge Impulse Edge Impulse is the leading development platform for machine learning on edge devices, free for developers and trusted by enterprises. Accelerate ML solution development using low-code to advanced integrations with the support from an expert. Learn more > Hard Hat Detection with Edge Impulse >
+
+
+
+
Cochl.Sense Cochl.Sense allows computers to understand sounds with machine listening technologies. With advanced audio processing and neural network techniques, it provides noise-robust and environment-independent machine listening. Just input your audio data (either file or stream) into Cochl.Sense, and it will detect and return what kind of the input sound is. It can be used on any device, any platform (smart speakers, IP cameras, etc.). Learn more > Getting Started with Cochl.Sense on NVIDIA® Jetson Devices >
+
+
+
+
+## Tech Support & Product Discussion
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/No-code-Edge-AI-Tool.md b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/No-code-Edge-AI-Tool.md
index 174aae36ff04d..3bdcaff919f55 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/No-code-Edge-AI-Tool.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/No-code-Edge-AI-Tool.md
@@ -1,468 +1,466 @@
----
-description: No code Edge AI Tool
-title: No code Edge AI Tool
-keywords:
- - Edge
- - reComputer Application
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /No-code-Edge-AI-Tool
-sku: 110061361
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# No code Edge AI Tool
-
-We are pleased to bring you our new experience on the reComputer built with Jetson Nano for quick and easy object recognition.
-
-With just a few simple commands, the environment can be downloaded and deployed, and the process of monitoring, identifying and outputting results from a live screen can't be simpler than three blocks.
-
-## Demo Video
-
-**Warehouse Security Demo**
-
-
-
-**Farm Guards Demo**
-
-
-
-## Preliminary Preparation
-
-In this example, we'll go over how to download and install what we need under a fresh NVIDIA Jetson system, then open the Edge AI Tool and perform object detection with a live camera. Below is an overview of the steps.
-
-
-
-1. Download and deploy
-2. Place blocks
-3. Show results
-
-### Hardware Requirements
-
-Before you start, you will need to have the following hardware ready.
-
-
-
-!!!Attention
- This example will only run on the reComputer built with Jetson Nano. Note that the reComputer built with Jetson Xavier NX is not supported to work at this time, but it will be supported in the future.
-
-### Software Requirements
-
-Before you start, make sure your device is flashed with [JetPack 4.6.1](https://developer.nvidia.com/embedded/jetpack-sdk-461). If you want to reflash the Jetson Nano eMMC with JetPack 4.6.1, please refer [here](https://docs.nvidia.com/sdk-manager/install-with-sdkm-jetson/index.html).
-
-You can check the installed JetPack version by typing the following on the terminal:
-
-```sh
-cat /etc/nv_tegra_release
-```
-
-And the output should look like this
-
-
-
-**Note:** R32.7.1 corresponds to JetPack 4.6.1
-
-## Getting Started
-
-Once the hardware and software are ready as described above, let's move on to the Edge AI Tool experience. In this example, please connect your display, mouse or keyboard as required, you can also control your NVIDIA Jetson remotely via SSH or VNC.
-
-### Step 1. Download and deploy
-
-Open a command line window in NVIDIA Jetson and enter the following command to download the required files to Jetson.
-
-```sh
-git clone https://github.com/Seeed-Studio/node-red-contrib-ml.git
-```
-
-Once the download is complete, run the following command to start the required docker.
-
-```sh
-cd node-red-contrib-ml
-sudo ./docker-ubuntu.sh
-```
-
-The whole installation and start-up process will take about 7 to 9 minutes.
-
-### Step 2. Place blocks
-
-Once the installation is complete, use the Google Chrome browser that comes with your NVIDIA Jetson system to enter the following URL to access the operating interface.
-
-```
-127.0.0.1:1880
-```
-
-You can also enter the IP address plus the port number (1880) in the address bar to access the action page.
-
-
-
-We can see the distribution of Edge AI Tool operations in the diagram below.
-
-
-
-- **Block Area:** This area is home to a number of blocks that can be manipulated by the user.
-
-- **Programming Area:** This area is the user's Programming Area. The user can drag and drop blocks from the Block Area to the Programming Area to complete the program.
-
-- **Setup Area:** On the far right is the Setup Area. Here we can see the flow of the Programming Area and can complete some necessary settings or set up operations on blocks etc. in this area.
-
-In the Block Area, there is a section called **seeed recomputer** where we will focus on the use of these three blocks.
-
-
-
-- **video input:** This lock is used to get the video stream from the camera input. This block can be set up to select a webcam or a local V4L2 USB camera etc.
-
-- **detection:** This block is used to select the model to be recognised. The input video stream will be recognised using the model you have selected. For the time being, only the **COCO dataset** can be used under this version.
-
-- **video view:** This block is used to output the processed video stream on the screen.
-
-Next we can take a look at the composition of the blocks. Take the building block **video input** as an example.
-
-
-
-To the left of this block there is a square blue area. When this area is hidden, it means that the video streaming input is turned off.
-
-
-
-When this area is displayed, it means that the video streaming input is switched on.
-
-
-
-Similarly, the video view block has a square block like this on the right side. Hide turns off the display of the video stream output, the opposite is true.
-
-
-
-If there is a blue dot in the top right of the block, this is a reminder that the block has been edited, but not deployed. By the way, the whole project runs and needs to be programmed with blocks and deployed before the results are shown.
-
-
-
-The grey square to the right of the block is where the blocks are connected. Left mouse click here and drag it to the next block to the left of the connection, then you can connect the two blocks to form a program flow.
-
-
-
-It should be noted that the program flow is executed from **left to right** in this order, and that the left-hand join can only be connected to the right-hand join.
-
-If there is no join to the left of the block, it should be used as the start node of the program flow. If the right-hand side of the block has no connections, then it should be used as the end node of the entire program flow.
-
-A block with two joints, like **object detection**, means that several different contents can be output to the block. It is then possible to output both video streams and logs.
-
-
-
-The blocks are also very easy and quick to use. You can drag the block you want to use by long pressing the left mouse button and then drag it to the Programming Area of the main screen.
-
-
-
-Based on the above description of the blocks, we can design a simple block procedure as follows.
-
-
-
-The program shown above is the one that takes the input video stream from the camera and then uses model detection to input the result of recognising the object.
-
-### Step 3. Show results
-
-Once the blocks have been placed, we still need to make a simple configuration of the blocks before they can be used. If you want to set up a particular block, you can double click on it and the corresponding settings box will pop up on the right hand side.
-
-Let's start by setting up the **video input** block.
-
-
-
-- **Device type:** Here you can set the type of camera you have, currently two types of camera are supported, webcam and local camera.
-
-- **Video:** Select your camera here. If there is no camera available here, please double check that the camera is supported or that it is connected successfully.
-
-- **URL:** If you have selected a webcam, the Video field will become a URL. Here please fill in the input source of the webcam.
-
-
-
-- **Resolution:** Select your camera resolution here. Selecting the wrong resolution may result in a runtime error.
-
-For **object detection** block, the settings are as follows.
-
-
-
-- **Model name:** Here you select the model name for object recognition, currently only the COCO dataset is supported.
-
-!!!Note
- COCO is a large-scale object detection, segmentation, and captioning dataset. COCO has several features:
- - Object segmentation
- - Recognition in context
- - Superpixel stuff segmentation
- - 330K images (>200K labeled)
- - 1.5 million object instances
- - 80 object categories
- - 91 stuff categories
- - 5 captions per image
- - 250,000 people with keypoints
-
-
-
-Once you have done so, click on the **deploy** button in the top right hand corner of the interface and the program stream will start running.
-
-
-
-If everything is OK, you can see that the objects identified by the video stream are circled by boxes and given confidence values.
-
-
-
-## In-depth Operation
-
-We experienced the Edge AI Tool program in its simplest form in the previous chapter. In this section we will take you through more extensions to Edge AI Tool.
-
-
-
-### Blocks Download
-
-In addition to the blocks in the blocks section, we can download as many blocks as we need to complete more complex projects.
-
-In the Setup Area on the right, there is a button for more options, we select **Manage palette**.
-
-
-
-On the pop-up page, you can see the installed blocks and select **Install** to download more blocks. Here, we take the example of the mailbox block.
-
-
-
-After installation, the newly installed blocks can be seen at the bottom of the blocks section.
-
-
-
-### Importing others projects
-
-There are times when perhaps you would like to share your interesting projects for others to experience. Or maybe it is someone else's project that you would like to use yourself, then you can refer to the following ways.
-
-In the Setup Area on the right, there is a button for more options, we select **Import**.
-
-
-
-Next we can paste the code we have shared or obtained in the pop-up window.
-
-
-
-In this example, we will share with you a wonderful project that focuses on the ability to detect, in real time, whether someone has entered the environment through a camera and send an email notification if a person is detected.
-
-```json
-[
- {
- "id": "7963f97f362cdfc6",
- "type": "tab",
- "label": "warning email",
- "disabled": false,
- "info": "",
- "env": []
- },
- {
- "id": "41a8f267df4eb722",
- "type": "video input",
- "z": "7963f97f362cdfc6",
- "name": "",
- "deviceType": "rtsp",
- "rtsp": "",
- "local": "video0",
- "resolution": "2560",
- "frequency": "60",
- "senderr": true,
- "active": false,
- "x": 160,
- "y": 140,
- "wires": [
- [
- "c5fef75b0ab418c6"
- ]
- ]
- },
- {
- "id": "c5fef75b0ab418c6",
- "type": "detection",
- "z": "7963f97f362cdfc6",
- "name": "",
- "modelName": "coco_dataset",
- "showResult": true,
- "senderr": true,
- "x": 380,
- "y": 200,
- "wires": [
- [
- "40523cc8b61cfcc9"
- ],
- [
- "689c67f6610be9e2"
- ]
- ]
- },
- {
- "id": "40523cc8b61cfcc9",
- "type": "video view",
- "z": "7963f97f362cdfc6",
- "name": "",
- "width": 640,
- "data": "payload",
- "dataType": "msg",
- "thumbnail": false,
- "active": false,
- "pass": false,
- "outputs": 0,
- "x": 650,
- "y": 140,
- "wires": []
- },
- {
- "id": "689c67f6610be9e2",
- "type": "switch",
- "z": "7963f97f362cdfc6",
- "name": "person intrusion detected",
- "property": "payload.labels",
- "propertyType": "msg",
- "rules": [
- {
- "t": "eq",
- "v": "person",
- "vt": "str"
- }
- ],
- "checkall": "true",
- "repair": false,
- "outputs": 1,
- "x": 410,
- "y": 540,
- "wires": [
- [
- "40f6ca0fbb322dd5"
- ]
- ]
- },
- {
- "id": "40f6ca0fbb322dd5",
- "type": "e-mail",
- "z": "7963f97f362cdfc6",
- "server": "",
- "port": "465",
- "secure": true,
- "tls": true,
- "name": "",
- "dname": "warning email",
- "credentials": {
- "userid": "",
- "password": ""
- },
- "x": 720,
- "y": 620,
- "wires": []
- },
- {
- "id": "80a51065a9ee835e",
- "type": "ui_spacer",
- "z": "7963f97f362cdfc6",
- "name": "spacer",
- "group": "529bf2dedebe9911",
- "order": 2,
- "width": 12,
- "height": 1
- },
- {
- "id": "529bf2dedebe9911",
- "type": "ui_group",
- "name": "Default",
- "tab": "ad4ccf9922566f44",
- "order": 1,
- "disp": true,
- "width": 20,
- "collapse": false,
- "className": ""
- },
- {
- "id": "ad4ccf9922566f44",
- "type": "ui_tab",
- "name": "Home",
- "icon": "dashboard",
- "disabled": false,
- "hidden": false
- }
-]
-```
-
-Note that the code is not directly usable, you will need to fill in `"rtsp": "",` with the input source of your webcam. Fill in `"server": "",` with your email server address and `"credentials": {
- "userid": "",
- "password": ""
- },` fill in your username and password.
-
-When everything is ready, the block program works and pushes you an email when it detects activity.
-
-
-
-In this project, two new blocks are used, **switch** and **email**.
-
-The switch building block is where you feel the program is going based on the judgement information you set. For example, in this program I have named the switch block **person intrusion detected** and filled in the property **payload.labels**. **payload.labels** is the key value of the previous block **object detection**. When the value of the property is equal to **person**, the block connected after switch is executed.
-
-
-
-The email block is a little easier to set up, you just need to fill in the email address and server address that you want to receive messages from, depending on the protocol your mailbox supports.
-
-
-
-Of course, if you copy the code directly and complete the code changes, you can make no further changes to the blocks. If you are more comfortable using the graphical interface, you can also complete the configuration of these elements in the block settings.
-
-## Troubleshooting
-
-### What should I do if docker does not start successfully and if there is no seed recomputer in the blocks?
-
-We can shut down docker and restart it with the following command.
-
-```sh
-cd node-red-contrib-ml/
-sudo docker-compose --file docker-compose.yaml down
-sudo docker-compose --file docker-compose.yaml up
-```
-
-### What should I do if I can't observe the results or if there are errors in the debug?
-
-Please use the following command to see if the docker installation is correct. You should get the three dockers shown in the diagram. if any of them are missing, go back to the first step in **Getting Started** and reinstall the docker.
-
-```sh
-sudo docker image ls
-```
-
-
-
-If the installation matches the image, then check the running status of the launched docker using the following command.
-
-```sh
-sudo docker ps
-```
-
-
-
-If there is no docker started as in the picture above, try restarting the docker or check if the model and system version of the device match the requirements.
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: No code Edge AI Tool
+title: No code Edge AI Tool
+keywords:
+ - Edge
+ - reComputer Application
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /No-code-Edge-AI-Tool
+sku: 110061361
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# No code Edge AI Tool
+
+We are pleased to bring you our new experience on the reComputer built with Jetson Nano for quick and easy object recognition.
+
+With just a few simple commands, the environment can be downloaded and deployed, and the process of monitoring, identifying and outputting results from a live screen can't be simpler than three blocks.
+
+## Demo Video
+
+**Warehouse Security Demo**
+
+
+
+**Farm Guards Demo**
+
+
+
+## Preliminary Preparation
+
+In this example, we'll go over how to download and install what we need under a fresh NVIDIA Jetson system, then open the Edge AI Tool and perform object detection with a live camera. Below is an overview of the steps.
+
+
+
+1. Download and deploy
+2. Place blocks
+3. Show results
+
+### Hardware Requirements
+
+Before you start, you will need to have the following hardware ready.
+
+
+
+!!!Attention
+ This example will only run on the reComputer built with Jetson Nano. Note that the reComputer built with Jetson Xavier NX is not supported to work at this time, but it will be supported in the future.
+
+### Software Requirements
+
+Before you start, make sure your device is flashed with [JetPack 4.6.1](https://developer.nvidia.com/embedded/jetpack-sdk-461). If you want to reflash the Jetson Nano eMMC with JetPack 4.6.1, please refer [here](https://docs.nvidia.com/sdk-manager/install-with-sdkm-jetson/index.html).
+
+You can check the installed JetPack version by typing the following on the terminal:
+
+```sh
+cat /etc/nv_tegra_release
+```
+
+And the output should look like this
+
+
+
+**Note:** R32.7.1 corresponds to JetPack 4.6.1
+
+## Getting Started
+
+Once the hardware and software are ready as described above, let's move on to the Edge AI Tool experience. In this example, please connect your display, mouse or keyboard as required, you can also control your NVIDIA Jetson remotely via SSH or VNC.
+
+### Step 1. Download and deploy
+
+Open a command line window in NVIDIA Jetson and enter the following command to download the required files to Jetson.
+
+```sh
+git clone https://github.com/Seeed-Studio/node-red-contrib-ml.git
+```
+
+Once the download is complete, run the following command to start the required docker.
+
+```sh
+cd node-red-contrib-ml
+sudo ./docker-ubuntu.sh
+```
+
+The whole installation and start-up process will take about 7 to 9 minutes.
+
+### Step 2. Place blocks
+
+Once the installation is complete, use the Google Chrome browser that comes with your NVIDIA Jetson system to enter the following URL to access the operating interface.
+
+```
+127.0.0.1:1880
+```
+
+You can also enter the IP address plus the port number (1880) in the address bar to access the action page.
+
+
+
+We can see the distribution of Edge AI Tool operations in the diagram below.
+
+
+
+- **Block Area:** This area is home to a number of blocks that can be manipulated by the user.
+
+- **Programming Area:** This area is the user's Programming Area. The user can drag and drop blocks from the Block Area to the Programming Area to complete the program.
+
+- **Setup Area:** On the far right is the Setup Area. Here we can see the flow of the Programming Area and can complete some necessary settings or set up operations on blocks etc. in this area.
+
+In the Block Area, there is a section called **seeed recomputer** where we will focus on the use of these three blocks.
+
+
+
+- **video input:** This lock is used to get the video stream from the camera input. This block can be set up to select a webcam or a local V4L2 USB camera etc.
+
+- **detection:** This block is used to select the model to be recognised. The input video stream will be recognised using the model you have selected. For the time being, only the **COCO dataset** can be used under this version.
+
+- **video view:** This block is used to output the processed video stream on the screen.
+
+Next we can take a look at the composition of the blocks. Take the building block **video input** as an example.
+
+
+
+To the left of this block there is a square blue area. When this area is hidden, it means that the video streaming input is turned off.
+
+
+
+When this area is displayed, it means that the video streaming input is switched on.
+
+
+
+Similarly, the video view block has a square block like this on the right side. Hide turns off the display of the video stream output, the opposite is true.
+
+
+
+If there is a blue dot in the top right of the block, this is a reminder that the block has been edited, but not deployed. By the way, the whole project runs and needs to be programmed with blocks and deployed before the results are shown.
+
+
+
+The grey square to the right of the block is where the blocks are connected. Left mouse click here and drag it to the next block to the left of the connection, then you can connect the two blocks to form a program flow.
+
+
+
+It should be noted that the program flow is executed from **left to right** in this order, and that the left-hand join can only be connected to the right-hand join.
+
+If there is no join to the left of the block, it should be used as the start node of the program flow. If the right-hand side of the block has no connections, then it should be used as the end node of the entire program flow.
+
+A block with two joints, like **object detection**, means that several different contents can be output to the block. It is then possible to output both video streams and logs.
+
+
+
+The blocks are also very easy and quick to use. You can drag the block you want to use by long pressing the left mouse button and then drag it to the Programming Area of the main screen.
+
+
+
+Based on the above description of the blocks, we can design a simple block procedure as follows.
+
+
+
+The program shown above is the one that takes the input video stream from the camera and then uses model detection to input the result of recognising the object.
+
+### Step 3. Show results
+
+Once the blocks have been placed, we still need to make a simple configuration of the blocks before they can be used. If you want to set up a particular block, you can double click on it and the corresponding settings box will pop up on the right hand side.
+
+Let's start by setting up the **video input** block.
+
+
+
+- **Device type:** Here you can set the type of camera you have, currently two types of camera are supported, webcam and local camera.
+
+- **Video:** Select your camera here. If there is no camera available here, please double check that the camera is supported or that it is connected successfully.
+
+- **URL:** If you have selected a webcam, the Video field will become a URL. Here please fill in the input source of the webcam.
+
+
+
+- **Resolution:** Select your camera resolution here. Selecting the wrong resolution may result in a runtime error.
+
+For **object detection** block, the settings are as follows.
+
+
+
+- **Model name:** Here you select the model name for object recognition, currently only the COCO dataset is supported.
+
+!!!Note
+ COCO is a large-scale object detection, segmentation, and captioning dataset. COCO has several features:
+ - Object segmentation
+ - Recognition in context
+ - Superpixel stuff segmentation
+ - 330K images (>200K labeled)
+ - 1.5 million object instances
+ - 80 object categories
+ - 91 stuff categories
+ - 5 captions per image
+ - 250,000 people with keypoints
+
+
+
+Once you have done so, click on the **deploy** button in the top right hand corner of the interface and the program stream will start running.
+
+
+
+If everything is OK, you can see that the objects identified by the video stream are circled by boxes and given confidence values.
+
+
+
+## In-depth Operation
+
+We experienced the Edge AI Tool program in its simplest form in the previous chapter. In this section we will take you through more extensions to Edge AI Tool.
+
+
+
+### Blocks Download
+
+In addition to the blocks in the blocks section, we can download as many blocks as we need to complete more complex projects.
+
+In the Setup Area on the right, there is a button for more options, we select **Manage palette**.
+
+
+
+On the pop-up page, you can see the installed blocks and select **Install** to download more blocks. Here, we take the example of the mailbox block.
+
+
+
+After installation, the newly installed blocks can be seen at the bottom of the blocks section.
+
+
+
+### Importing others projects
+
+There are times when perhaps you would like to share your interesting projects for others to experience. Or maybe it is someone else's project that you would like to use yourself, then you can refer to the following ways.
+
+In the Setup Area on the right, there is a button for more options, we select **Import**.
+
+
+
+Next we can paste the code we have shared or obtained in the pop-up window.
+
+
+
+In this example, we will share with you a wonderful project that focuses on the ability to detect, in real time, whether someone has entered the environment through a camera and send an email notification if a person is detected.
+
+```json
+[
+ {
+ "id": "7963f97f362cdfc6",
+ "type": "tab",
+ "label": "warning email",
+ "disabled": false,
+ "info": "",
+ "env": []
+ },
+ {
+ "id": "41a8f267df4eb722",
+ "type": "video input",
+ "z": "7963f97f362cdfc6",
+ "name": "",
+ "deviceType": "rtsp",
+ "rtsp": "",
+ "local": "video0",
+ "resolution": "2560",
+ "frequency": "60",
+ "senderr": true,
+ "active": false,
+ "x": 160,
+ "y": 140,
+ "wires": [
+ [
+ "c5fef75b0ab418c6"
+ ]
+ ]
+ },
+ {
+ "id": "c5fef75b0ab418c6",
+ "type": "detection",
+ "z": "7963f97f362cdfc6",
+ "name": "",
+ "modelName": "coco_dataset",
+ "showResult": true,
+ "senderr": true,
+ "x": 380,
+ "y": 200,
+ "wires": [
+ [
+ "40523cc8b61cfcc9"
+ ],
+ [
+ "689c67f6610be9e2"
+ ]
+ ]
+ },
+ {
+ "id": "40523cc8b61cfcc9",
+ "type": "video view",
+ "z": "7963f97f362cdfc6",
+ "name": "",
+ "width": 640,
+ "data": "payload",
+ "dataType": "msg",
+ "thumbnail": false,
+ "active": false,
+ "pass": false,
+ "outputs": 0,
+ "x": 650,
+ "y": 140,
+ "wires": []
+ },
+ {
+ "id": "689c67f6610be9e2",
+ "type": "switch",
+ "z": "7963f97f362cdfc6",
+ "name": "person intrusion detected",
+ "property": "payload.labels",
+ "propertyType": "msg",
+ "rules": [
+ {
+ "t": "eq",
+ "v": "person",
+ "vt": "str"
+ }
+ ],
+ "checkall": "true",
+ "repair": false,
+ "outputs": 1,
+ "x": 410,
+ "y": 540,
+ "wires": [
+ [
+ "40f6ca0fbb322dd5"
+ ]
+ ]
+ },
+ {
+ "id": "40f6ca0fbb322dd5",
+ "type": "e-mail",
+ "z": "7963f97f362cdfc6",
+ "server": "",
+ "port": "465",
+ "secure": true,
+ "tls": true,
+ "name": "",
+ "dname": "warning email",
+ "credentials": {
+ "userid": "",
+ "password": ""
+ },
+ "x": 720,
+ "y": 620,
+ "wires": []
+ },
+ {
+ "id": "80a51065a9ee835e",
+ "type": "ui_spacer",
+ "z": "7963f97f362cdfc6",
+ "name": "spacer",
+ "group": "529bf2dedebe9911",
+ "order": 2,
+ "width": 12,
+ "height": 1
+ },
+ {
+ "id": "529bf2dedebe9911",
+ "type": "ui_group",
+ "name": "Default",
+ "tab": "ad4ccf9922566f44",
+ "order": 1,
+ "disp": true,
+ "width": 20,
+ "collapse": false,
+ "className": ""
+ },
+ {
+ "id": "ad4ccf9922566f44",
+ "type": "ui_tab",
+ "name": "Home",
+ "icon": "dashboard",
+ "disabled": false,
+ "hidden": false
+ }
+]
+```
+
+Note that the code is not directly usable, you will need to fill in `"rtsp": "",` with the input source of your webcam. Fill in `"server": "",` with your email server address and `"credentials": {
+ "userid": "",
+ "password": ""
+ },` fill in your username and password.
+
+When everything is ready, the block program works and pushes you an email when it detects activity.
+
+
+
+In this project, two new blocks are used, **switch** and **email**.
+
+The switch building block is where you feel the program is going based on the judgement information you set. For example, in this program I have named the switch block **person intrusion detected** and filled in the property **payload.labels**. **payload.labels** is the key value of the previous block **object detection**. When the value of the property is equal to **person**, the block connected after switch is executed.
+
+
+
+The email block is a little easier to set up, you just need to fill in the email address and server address that you want to receive messages from, depending on the protocol your mailbox supports.
+
+
+
+Of course, if you copy the code directly and complete the code changes, you can make no further changes to the blocks. If you are more comfortable using the graphical interface, you can also complete the configuration of these elements in the block settings.
+
+## Troubleshooting
+
+### What should I do if docker does not start successfully and if there is no seed recomputer in the blocks?
+
+We can shut down docker and restart it with the following command.
+
+```sh
+cd node-red-contrib-ml/
+sudo docker-compose --file docker-compose.yaml down
+sudo docker-compose --file docker-compose.yaml up
+```
+
+### What should I do if I can't observe the results or if there are errors in the debug?
+
+Please use the following command to see if the docker installation is correct. You should get the three dockers shown in the diagram. if any of them are missing, go back to the first step in **Getting Started** and reinstall the docker.
+
+```sh
+sudo docker image ls
+```
+
+
+
+If the installation matches the image, then check the running status of the launched docker using the following command.
+
+```sh
+sudo docker ps
+```
+
+
+
+If there is no docker started as in the picture above, try restarting the docker or check if the model and system version of the device match the requirements.
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/reComputer_Jetson_Series_Resource.md b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/reComputer_Jetson_Series_Resource.md
index 1715eecfdae56..5b2acf352065f 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/reComputer_Jetson_Series_Resource.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Developer_Tools/reComputer_Jetson_Series_Resource.md
@@ -1,144 +1,142 @@
----
-description: Jetson Resource
-title: Jetson Resource
-keywords:
- - Edge
- - reComputer Application
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Series_Resource
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# Jetson Resource
-
-## [Jetson software](https://developer.nvidia.com/embedded/develop/software)
-
-All NVIDIA® Jetson™ modules and developer kits are supported by the same software stack, enabling you to develop once and deploy everywhere. Jetson Software is designed to provide end-to-end acceleration for AI applications and accelerate your time to market. We bring the same powerful NVIDIA technologies that power data center and cloud deployments to the edge.
-
-
-
-### [NVIDIA JetPack SDK](https://developer.nvidia.com/embedded/jetpack)
-
-The Jetson software stack starts with the NVIDIA JetPack™ SDK, which provides a complete development environment including CUDA-X acceleration libraries and other NVIDIA technologies to kickstart your development. JetPack includes the Jetson Linux driver package, which provides the Linux kernel, bootloader, NVIDIA drivers, flash utilities, sample filesystem, and toolchain for the Jetson platform. It also includes security features, over-the-air updates, and more. JetPack includes the NVIDIA container runtime to enable Cloud-Native technologies and workflows at the edge.
-
-Learn more:
-
-- [JetPack SDK](https://developer.nvidia.com/embedded/jetpack)
-- [Jetson Linux](https://developer.nvidia.com/embedded/linux-tegra)
-- [Cloud-Native on Jetson](https://developer.nvidia.com/embedded/jetson-cloud-native)
-
-### [NVIDIA TAO and pretrained AI models](https://developer.nvidia.com/tao)
-
-NVIDIA TAO simplifies time-consuming parts of deep learning workflows, from data preparation to training to optimization, reducing time-to-value.
-
-Learn more:
-
-- [TAO](https://developer.nvidia.com/tao)
-- [Pretrained Models](https://developer.nvidia.com/tao-toolkit)
-
-### [NVIDIA Triton Inference Server](https://developer.nvidia.com/nvidia-triton-inference-server)
-
-The NVIDIA Triton™ inference server simplifies the deployment of AI models at scale. Triton Inference Server is open source and provides a single standardized inference platform that can support multi-frame model inference in different deployments such as data center, cloud, embedded devices, and virtualized environments. It supports different types of inference queries with advanced batching and scheduling algorithms, and supports real-time model updates.
-
-Learn more:
-
-- [NVIDIA Triton Inference Server](https://developer.nvidia.com/nvidia-triton-inference-server)
-
-### [NVIDIA Riva](https://developer.nvidia.com/riva)
-
-NVIDIA Riva is a fully accelerated SDK for building multimodal conversational AI applications using end-to-end deep learning pipelines. The Riva SDK includes pretrained conversational AI models, the NVIDIA TAO toolkit, and optimized end-to-end skills for speech, vision, and natural language processing (NLP) tasks.
-
-Learn more:
-
-- [Riva](https://developer.nvidia.com/riva)
-
-### [NVIDIA DeepStream SDK](https://developer.nvidia.com/deepstream-sdk)
-
-The NVIDIA DeepStream SDK provides a complete stream analytics toolkit for AI-based multi-sensor processing and video and image understanding on Jetson. DeepStream is an integral part of NVIDIA Metropolis, a platform for building end-to-end services and solutions that transform pixel and sensor data into actionable insights. Learn more: DeepStream >
-
-Learn more:
-
-- [DeepStream >](https://developer.nvidia.com/deepstream-sdk)
-
-### [NVIDIA Isaac](https://developer.nvidia.com/isaac-sdk)
-
-NVIDIA Isaac ROS GEM is a hardware acceleration package that makes it easier for ROS developers to build high-performance solutions on NVIDIA hardware. NVIDIA Isaac Sim, powered by Omniverse, is a scalable robotics simulation application. It includes Replicator - a tool that generates various synthetic datasets for training perception models. Isaac Sim is also a tool that supports realistic, physically accurate virtual environments to develop, test and manage AI-based robots.
-
-Learn more:
-
-- [Isaac ROS GEM](https://developer.nvidia.com/isaac-ros-gems)
-- [Isaac Sim](https://developer.nvidia.com/isaac-sim)
-
----
-
-## [Jetson Modules](https://developer.nvidia.com/embedded/jetson-modules)
-
-
-
-NVIDIA ® Jetson™ brings accelerated AI performance to edge devices in an energy-efficient and compact form factor. The Jetson family of modules all use the same NVIDIA CUDA-X™ software and support cloud-native technologies such as containerization and orchestration to build, deploy and manage AI at the edge.
-
-[Learn about all Jetson modules >](https://developer.nvidia.com/embedded/jetson-modules)
-
-**reComputer Jetson applies these modules:**
-
-### Jetson Xavier NX Series
-
-
-
-
-
-
-
-
-
Jetson Xavier NX brings up to 21 TOPs of AI computing power to the edge in a small form factor module. It can run multiple modern neural networks in parallel and process data from multiple high-resolution sensors as a requirement for a complete AI system. Jetson Xavier NX series can be used in production applications and supports all popular AI frameworks. Jetson Xavier NX - reComputer J2011 Jetson Xavier NX 16GB - reComputer J2012
-
-
-
-
-### Jetson Nano
-
-
-
-
-
-
-
-
-
The Jetson Nano is a small, powerful computer for embedded AI systems and the IoTs, delivering the power of modern AI on a low-power platform. You can get up to speed quickly with the NVIDIA Jetpack SDK and a full desktop Linux environment and start exploring the new world of embedded products. Jetson Nano - reComputer J1010, reComputer J1020
-
-
-
-
-## Brush guide
-
-Since reComputer Jetson series products have been equipped 16 GB eMMC, and the `ubuntu 18.04 LTS` and `NVIDIA JetPack 4.6` are both pre-installed, you can directly apply it to develop your projects. If you want to re-flash, please visit the appropriate documentation below:
-
-- [J1010 carrier version](https://wiki.seeedstudio.com/reComputer_J1010_J101_Flash_Jetpack/)
-- [Jetson A206 carrier board](https://wiki.seeedstudio.com/reComputer_J1020_A206_Flash_JetPack/)
-
-## Support
-
-Ask and recevie questions on the Jetson Forum. NVIDIA engineers, community developers, and Jetson partners all contribute here. Check:
-
-- [Jetson Nano forum](https://forums.developer.nvidia.com/c/agx-autonomous-machines/jetson-embedded-systems/jetson-nano) for Jetson Nano developer kits and Jetson Nano production modules.
-- [Jetson Xavier NX Forum](https://forums.developer.nvidia.com/c/agx-autonomous-machines/jetson-embedded-systems/jetson-xavier-nx) for Jetson Xavier NX Development Kits and Jetson Xavier NX Production Modules.
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
-
+---
+description: Jetson Resource
+title: Jetson Resource
+keywords:
+ - Edge
+ - reComputer Application
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Series_Resource
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# Jetson Resource
+
+## [Jetson software](https://developer.nvidia.com/embedded/develop/software)
+
+All NVIDIA® Jetson™ modules and developer kits are supported by the same software stack, enabling you to develop once and deploy everywhere. Jetson Software is designed to provide end-to-end acceleration for AI applications and accelerate your time to market. We bring the same powerful NVIDIA technologies that power data center and cloud deployments to the edge.
+
+
+
+### [NVIDIA JetPack SDK](https://developer.nvidia.com/embedded/jetpack)
+
+The Jetson software stack starts with the NVIDIA JetPack™ SDK, which provides a complete development environment including CUDA-X acceleration libraries and other NVIDIA technologies to kickstart your development. JetPack includes the Jetson Linux driver package, which provides the Linux kernel, bootloader, NVIDIA drivers, flash utilities, sample filesystem, and toolchain for the Jetson platform. It also includes security features, over-the-air updates, and more. JetPack includes the NVIDIA container runtime to enable Cloud-Native technologies and workflows at the edge.
+
+Learn more:
+
+- [JetPack SDK](https://developer.nvidia.com/embedded/jetpack)
+- [Jetson Linux](https://developer.nvidia.com/embedded/linux-tegra)
+- [Cloud-Native on Jetson](https://developer.nvidia.com/embedded/jetson-cloud-native)
+
+### [NVIDIA TAO and pretrained AI models](https://developer.nvidia.com/tao)
+
+NVIDIA TAO simplifies time-consuming parts of deep learning workflows, from data preparation to training to optimization, reducing time-to-value.
+
+Learn more:
+
+- [TAO](https://developer.nvidia.com/tao)
+- [Pretrained Models](https://developer.nvidia.com/tao-toolkit)
+
+### [NVIDIA Triton Inference Server](https://developer.nvidia.com/nvidia-triton-inference-server)
+
+The NVIDIA Triton™ inference server simplifies the deployment of AI models at scale. Triton Inference Server is open source and provides a single standardized inference platform that can support multi-frame model inference in different deployments such as data center, cloud, embedded devices, and virtualized environments. It supports different types of inference queries with advanced batching and scheduling algorithms, and supports real-time model updates.
+
+Learn more:
+
+- [NVIDIA Triton Inference Server](https://developer.nvidia.com/nvidia-triton-inference-server)
+
+### [NVIDIA Riva](https://developer.nvidia.com/riva)
+
+NVIDIA Riva is a fully accelerated SDK for building multimodal conversational AI applications using end-to-end deep learning pipelines. The Riva SDK includes pretrained conversational AI models, the NVIDIA TAO toolkit, and optimized end-to-end skills for speech, vision, and natural language processing (NLP) tasks.
+
+Learn more:
+
+- [Riva](https://developer.nvidia.com/riva)
+
+### [NVIDIA DeepStream SDK](https://developer.nvidia.com/deepstream-sdk)
+
+The NVIDIA DeepStream SDK provides a complete stream analytics toolkit for AI-based multi-sensor processing and video and image understanding on Jetson. DeepStream is an integral part of NVIDIA Metropolis, a platform for building end-to-end services and solutions that transform pixel and sensor data into actionable insights. Learn more: DeepStream >
+
+Learn more:
+
+- [DeepStream >](https://developer.nvidia.com/deepstream-sdk)
+
+### [NVIDIA Isaac](https://developer.nvidia.com/isaac-sdk)
+
+NVIDIA Isaac ROS GEM is a hardware acceleration package that makes it easier for ROS developers to build high-performance solutions on NVIDIA hardware. NVIDIA Isaac Sim, powered by Omniverse, is a scalable robotics simulation application. It includes Replicator - a tool that generates various synthetic datasets for training perception models. Isaac Sim is also a tool that supports realistic, physically accurate virtual environments to develop, test and manage AI-based robots.
+
+Learn more:
+
+- [Isaac ROS GEM](https://developer.nvidia.com/isaac-ros-gems)
+- [Isaac Sim](https://developer.nvidia.com/isaac-sim)
+
+---
+
+## [Jetson Modules](https://developer.nvidia.com/embedded/jetson-modules)
+
+
+
+NVIDIA ® Jetson™ brings accelerated AI performance to edge devices in an energy-efficient and compact form factor. The Jetson family of modules all use the same NVIDIA CUDA-X™ software and support cloud-native technologies such as containerization and orchestration to build, deploy and manage AI at the edge.
+
+[Learn about all Jetson modules >](https://developer.nvidia.com/embedded/jetson-modules)
+
+**reComputer Jetson applies these modules:**
+
+### Jetson Xavier NX Series
+
+
+
+
+
+
+
+
+
Jetson Xavier NX brings up to 21 TOPs of AI computing power to the edge in a small form factor module. It can run multiple modern neural networks in parallel and process data from multiple high-resolution sensors as a requirement for a complete AI system. Jetson Xavier NX series can be used in production applications and supports all popular AI frameworks. Jetson Xavier NX - reComputer J2011 Jetson Xavier NX 16GB - reComputer J2012
+
+
+
+
+### Jetson Nano
+
+
+
+
+
+
+
+
+
The Jetson Nano is a small, powerful computer for embedded AI systems and the IoTs, delivering the power of modern AI on a low-power platform. You can get up to speed quickly with the NVIDIA Jetpack SDK and a full desktop Linux environment and start exploring the new world of embedded products. Jetson Nano - reComputer J1010, reComputer J1020
+
+
+
+
+## Brush guide
+
+Since reComputer Jetson series products have been equipped 16 GB eMMC, and the `ubuntu 18.04 LTS` and `NVIDIA JetPack 4.6` are both pre-installed, you can directly apply it to develop your projects. If you want to re-flash, please visit the appropriate documentation below:
+
+- [J1010 carrier version](https://wiki.seeedstudio.com/reComputer_J1010_J101_Flash_Jetpack/)
+- [Jetson A206 carrier board](https://wiki.seeedstudio.com/reComputer_J1020_A206_Flash_JetPack/)
+
+## Support
+
+Ask and recevie questions on the Jetson Forum. NVIDIA engineers, community developers, and Jetson partners all contribute here. Check:
+
+- [Jetson Nano forum](https://forums.developer.nvidia.com/c/agx-autonomous-machines/jetson-embedded-systems/jetson-nano) for Jetson Nano developer kits and Jetson Nano production modules.
+- [Jetson Xavier NX Forum](https://forums.developer.nvidia.com/c/agx-autonomous-machines/jetson-embedded-systems/jetson-xavier-nx) for Jetson Xavier NX Development Kits and Jetson Xavier NX Production Modules.
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_OpenClaw(Clawdbot)_on_reComputer_Jetson.md b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_OpenClaw(Clawdbot)_on_reComputer_Jetson.md
index e2f47fe8ab8c6..98c91759e891d 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_OpenClaw(Clawdbot)_on_reComputer_Jetson.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_OpenClaw(Clawdbot)_on_reComputer_Jetson.md
@@ -1,4 +1,4 @@
----
+---
description: This wiki shows how to deploy and use Clawdbot on reComputer Jetson.
title: Local OpenClaw(Clawdbot) on reComputer Jetson with Ollama
keywords:
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_RAG_based_on_Jetson_with_LlamaIndex.md b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_RAG_based_on_Jetson_with_LlamaIndex.md
index a829664116d0f..33edb76e844e4 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_RAG_based_on_Jetson_with_LlamaIndex.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Local_RAG_based_on_Jetson_with_LlamaIndex.md
@@ -12,9 +12,7 @@ slug: /Local_RAG_based_on_Jetson_with_LlamaIndex
last_update:
date: 05/15/2024
author: Jiahao
-
no_comments: false # for Disqus
-
---
# Local RAG based on Jetson with LlamaIndex
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Quantized_Llama2_7B_with_MLC_LLM_on_Jetson.md b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Quantized_Llama2_7B_with_MLC_LLM_on_Jetson.md
index be1032c768dbd..622f19e69133b 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Quantized_Llama2_7B_with_MLC_LLM_on_Jetson.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Quantized_Llama2_7B_with_MLC_LLM_on_Jetson.md
@@ -12,9 +12,7 @@ slug: /Quantized_Llama2_7B_with_MLC_LLM_on_Jetson
last_update:
date: 04/1/2024
author: Jiahao
-
no_comments: false # for Disqus
-
---
# Quantized Llama2-7B with MLC LLM on Jetson
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Real_Time_Subtitle_Recoder_on_Jetson.md b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Real_Time_Subtitle_Recoder_on_Jetson.md
index 124d9792ea99f..131a6b4e6f09d 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Real_Time_Subtitle_Recoder_on_Jetson.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Real_Time_Subtitle_Recoder_on_Jetson.md
@@ -10,9 +10,7 @@ slug: /Real Time Subtitle Recoder on Nvidia Jetson
last_update:
date: 02/23/2024
author: Jiahao
-
no_comments: false # for Disqus
-
---
# Speech Subtitle Generation on Nvidia Jetson
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Whisper_on_Jetson_for_Real_Time_Speech_to_Text.md b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Whisper_on_Jetson_for_Real_Time_Speech_to_Text.md
index f98b6913cc08f..e4320b9761e5f 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Whisper_on_Jetson_for_Real_Time_Speech_to_Text.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Generative_AI/Whisper_on_Jetson_for_Real_Time_Speech_to_Text.md
@@ -8,13 +8,10 @@ keywords:
- whisper
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /Whisper_on_Jetson_for_Real_Time_Speech_to_Text
-
last_update:
date: 03/14/2024
author: Jiahao
-
no_comments: false # for Disqus
-
---
# Deploy Whisper on NVIDIA Jetson Orin for Real time Speech to Text
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md b/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md
index b6b28d5c71d87..2b1db3cd599a2 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md
@@ -1,7 +1,6 @@
---
description: This wiki introduces how to get started with NVIDIA Jetson Thor and provides example workflows for deploying AI and robotics projects on Thor. Detailed step-by-step instructions and reference documentation are also provided.
title: Fine-tune Isaac GR00T N1.5 for LeRobot SO-101 Arm and Deploy on Jetson Thor
-
keywords:
- Thor
- Robotics
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.6_for_LeRobot_SO_Arm_and_Deploy_on_AGX_Orin.md b/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.6_for_LeRobot_SO_Arm_and_Deploy_on_AGX_Orin.md
index 0380999555c68..fbf132397c10c 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.6_for_LeRobot_SO_Arm_and_Deploy_on_AGX_Orin.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/Fine_tune_GR00T_N1.6_for_LeRobot_SO_Arm_and_Deploy_on_AGX_Orin.md
@@ -1,7 +1,6 @@
---
description: This wiki introduces provides example workflows for deploying AI and robotics projects on J501 Mini (AGX Orin). Detailed step-by-step instructions and reference documentation are also provided.
title: Fine-tune Isaac GR00T N1.6 for LeRobot SO-101 Arm and Deploy on AGX Orin
-
keywords:
- J501 mini
- Robotics
diff --git a/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/J501_Mini_StarAI_Viola_Fruit_Sorting.md b/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/J501_Mini_StarAI_Viola_Fruit_Sorting.md
index 26b59f3de887b..f74be08d7ed75 100644
--- a/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/J501_Mini_StarAI_Viola_Fruit_Sorting.md
+++ b/docs/Edge/NVIDIA_Jetson/Application/Physical_AI/J501_Mini_StarAI_Viola_Fruit_Sorting.md
@@ -1,7 +1,6 @@
---
description: This wiki demonstrates how to use J501 Mini with StarAI Viola robotic arm for fruit sorting tasks using LeRobot framework and ACT model.
title: Fruit Sorting with J501 Mini and StarAI Viola Arm
-
keywords:
- J501 mini
- Robotics
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md
index c78713091d997..d6680f1ff4aa2 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md
@@ -10,9 +10,7 @@ sku: 114110047,114110049,114110048,103110043
last_update:
date: 01/05/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
-
-# J101 Enable SD Card
-
-The method is flashing NVIDIA JetPack OS to the SD card on J101 Carrier Board which is operated on the reComputer J1010. So Flash JetPack OS into reComputer J1010 first is required.
-
-## Driver Configuration
-
-At the beginning, we need to power on the reComputer and go to the desktop like below:
-
-
-
-
-### Step 1 . Clone the repo
-
-Right click and open the Terminal, and then execute the command below to download the relevant code:
-
-```sh
-git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays.git
-```
-
-### Step 2. Compile jetson-sdmmc-overlay
-
-Access to the workspace location:
-
-```bash
-cd seeed-linux-dtoverlays
-```
-
-For J101 Carrier board , We need to change the "compatible" value in this file "overlays\jetsonnano\jetson-sdmmc-overlay.dts".
-
-```bash
-sed -i '17s#JETSON_COMPATIBLE#\"nvidia,p3449-0000-b00+p3448-0002-b00\"\, \"nvidia\,jetson-nano\"\, \"nvidia\,tegra210\"#' overlays/jetsonnano/jetson-sdmmc-overlay.dts
-```
-
-
-
-And then we compile the file we changed to make sure they are correctly modified.
-
-```bash
-make overlays/jetsonnano/jetson-sdmmc-overlay.dtbo
-```
-
-### Step 3. Make sure the sd card can be recognized
-
-Insert the SD card to the **J101 Carrier board**.
-
-```bash
-sudo cp overlays/jetsonnano/jetson-sdmmc-overlay.dtbo /boot/
-cd /boot/
-sudo /opt/nvidia/jetson-io/config-by-hardware.py -l
-```
-
-After executing these command above, we should get the output **similar** (**It may not be exactly the same. Depends on the peripheral and the drivers already installed**) to the following and we know the SD card have been regognized:
-
-```txt
- Header 1 [default]: Jetson 40pin Header
- Available hardware modules:
- 1. Adafruit SPH0645LM4H
- 2. Adafruit UDA1334A
- 3. FE-PI Audio V1 and Z V2
- 4. MCP251x CAN Controller
- 5. ReSpeaker 4 Mic Array
- 6. ReSpeaker 4 Mic Linear Array
- 7. reComputer sdmmc
- Header 2: Jetson Nano CSI Connector
-
-
- Available hardware modules:
- 1. Camera IMX219 Dual
- 2. Camera IMX477 Dual
- 3. Camera IMX477-A and IMX219-B
- Header 3: Jetson M.2 Key E Slot
- No hardware configurations found!
-```
-
-### Step 4. Name our device and Finish driver installation
-
-```bash
-sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "reComputer sdmmc"
-```
-
-
-
-
-!!!Note
- You may need to **reboot** to run jtop after completing the installation for the first time.
-
-
-
-## More
-
-### Change SD card I/O speed
-
-We provide SD card function on reComputer J101 carrier board, which supports CLK Frequency 48MHz. The CLK here is designed to achieve certificates (such as CE/FCC). If you want to increase CLK by yourself, you can use the instruction below.
-
-
-
-
-
-
-- **Step 1**. Clone this repository and modify the the code below.
-
- ```bash
- git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays
- ```
-
-- **Step 2**. Modify and Compile max-clk-limit value
-
- ```bash
- cd seeed-linux-dtoverlays
- sed -i '10s#48000000#208000000#' overlays/jetsonnano/jetson-sdmmc-overlay.dts
- make overlays/jetsonnano/jetson-sdmmc-overlay.dtbo
- sudo cp overlays/jetsonnano/jetson-sdmmc-overlay.dtbo /boot/
- sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "reComputer sdmmc"
- ```
-
-- **Step 3**. Reboot
-
- ```bash
- reboot
- ```
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
-
+---
+description: J101 Enable SD Card
+title: J101 Enable SD Card
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /J101_Enable_SD_Card
+last_update:
+ date: 01/05/2022
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+
+
+# J101 Enable SD Card
+
+The method is flashing NVIDIA JetPack OS to the SD card on J101 Carrier Board which is operated on the reComputer J1010. So Flash JetPack OS into reComputer J1010 first is required.
+
+## Driver Configuration
+
+At the beginning, we need to power on the reComputer and go to the desktop like below:
+
+
+
+
+### Step 1 . Clone the repo
+
+Right click and open the Terminal, and then execute the command below to download the relevant code:
+
+```sh
+git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays.git
+```
+
+### Step 2. Compile jetson-sdmmc-overlay
+
+Access to the workspace location:
+
+```bash
+cd seeed-linux-dtoverlays
+```
+
+For J101 Carrier board , We need to change the "compatible" value in this file "overlays\jetsonnano\jetson-sdmmc-overlay.dts".
+
+```bash
+sed -i '17s#JETSON_COMPATIBLE#\"nvidia,p3449-0000-b00+p3448-0002-b00\"\, \"nvidia\,jetson-nano\"\, \"nvidia\,tegra210\"#' overlays/jetsonnano/jetson-sdmmc-overlay.dts
+```
+
+
+
+And then we compile the file we changed to make sure they are correctly modified.
+
+```bash
+make overlays/jetsonnano/jetson-sdmmc-overlay.dtbo
+```
+
+### Step 3. Make sure the sd card can be recognized
+
+Insert the SD card to the **J101 Carrier board**.
+
+```bash
+sudo cp overlays/jetsonnano/jetson-sdmmc-overlay.dtbo /boot/
+cd /boot/
+sudo /opt/nvidia/jetson-io/config-by-hardware.py -l
+```
+
+After executing these command above, we should get the output **similar** (**It may not be exactly the same. Depends on the peripheral and the drivers already installed**) to the following and we know the SD card have been regognized:
+
+```txt
+ Header 1 [default]: Jetson 40pin Header
+ Available hardware modules:
+ 1. Adafruit SPH0645LM4H
+ 2. Adafruit UDA1334A
+ 3. FE-PI Audio V1 and Z V2
+ 4. MCP251x CAN Controller
+ 5. ReSpeaker 4 Mic Array
+ 6. ReSpeaker 4 Mic Linear Array
+ 7. reComputer sdmmc
+ Header 2: Jetson Nano CSI Connector
+
+
+ Available hardware modules:
+ 1. Camera IMX219 Dual
+ 2. Camera IMX477 Dual
+ 3. Camera IMX477-A and IMX219-B
+ Header 3: Jetson M.2 Key E Slot
+ No hardware configurations found!
+```
+
+### Step 4. Name our device and Finish driver installation
+
+```bash
+sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "reComputer sdmmc"
+```
+
+
+
+
+!!!Note
+ You may need to **reboot** to run jtop after completing the installation for the first time.
+
+
+
+## More
+
+### Change SD card I/O speed
+
+We provide SD card function on reComputer J101 carrier board, which supports CLK Frequency 48MHz. The CLK here is designed to achieve certificates (such as CE/FCC). If you want to increase CLK by yourself, you can use the instruction below.
+
+
+
+
+
+
+- **Step 1**. Clone this repository and modify the the code below.
+
+ ```bash
+ git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays
+ ```
+
+- **Step 2**. Modify and Compile max-clk-limit value
+
+ ```bash
+ cd seeed-linux-dtoverlays
+ sed -i '10s#48000000#208000000#' overlays/jetsonnano/jetson-sdmmc-overlay.dts
+ make overlays/jetsonnano/jetson-sdmmc-overlay.dtbo
+ sudo cp overlays/jetsonnano/jetson-sdmmc-overlay.dtbo /boot/
+ sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "reComputer sdmmc"
+ ```
+
+- **Step 3**. Reboot
+
+ ```bash
+ reboot
+ ```
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Memory_Expansion.md b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Memory_Expansion.md
index 0073cc2f9a7bd..6d2ad9136287f 100644
--- a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Memory_Expansion.md
+++ b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Memory_Expansion.md
@@ -1,647 +1,645 @@
----
-description: Memory Expansion
-title: Memory Expansion
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Memory_Expansion
-last_update:
- date: 01/05/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# reComputer for Jetson Memory Expansion
-
-The reComputer for Jetson is sold with 16 GB of eMMC and has **ubuntu 18.04 LTS** and **NVIDIA JetPack 4.6** installed, so the remaining user space available is about 2 GB, which is a significant obstacle to using the reComputer for training and deployment in some projects. This tutorial will introduce the expansion process for different models of reComputer based on this situation, and help developers to expand their systems by transferring them to external storage devices.
-
-## Fundamentals Of Capacity Expansion
-
-The first sector on the disk where the system is installed is called the **Master Boot Record (MBR)**, which contains information about the **BootLoader**, the partition table, and the fixed identifier **55AA**. During the boot process of Linux, the **BootLoader** and the **kernel** go through two important phases.
-
-**Phase 1:** The BootLoader initializes **(initrd)** a temporary root file system **(ramfs)**. The ramfs contains configuration programs for drivers, file systems (fs), networks (net), etc. that are necessary at boot time. After that, control of the BootLoader is transferred to the kernel so that the kernel can take out these programs, move them to memory **(RAM)** and run them to load the various functional modules.
-
-**Phase 2:** After the kernel has loaded the necessary modules with the ramfs, it releases the system and configures the real root file system **(rootfs)** to mount to the real root directory.
-
-1. In the above two phases, we do not need to modify the part of the kernel that loads the functional modules with the ramfs (phase 1), so even if reComputer has been expanded, it will still need to use eMMC.
-2. What we need to modify is the second phase, which mounts the root filesystem to external memory, thus enabling the expansion.
-
-
-
-## Notes On Capacity Expansion
-
-1. The main principle of scaling via external storage is to set the rootfs to be on an external storage device.
-
-2. This expansion method will modify the Linux kernel level system files and you may encounter some problems that are not easy to solve. You should use a new reComputer and a new storage device when following this tutorial to complete the expansion, and **do not try to store valuable files on the device**. If everything does not work as expected, you may need to reformat the storage device or even the reComputer, and for the final retention option, we will offer to help you restore the backup via the serial port if possible, but you are responsible for any data loss.
-
-3. This expansion process does not require recompiling the kernel and saves about 40 minutes of installation time compared to other earlier expansion methods available online.
-
-## Expansion Via M.2 Slot On Carrier Board And SSD
-
-SSD, also known as Solid State Drives, is often used as the primary storage device for laptops, desktops, etc. With its high reliability and fast data read and write rates, it is the best choice for reComputer expansion. The following table lists the reComputer Series products that are currently available for SSD expansion solutions. The main reason why the reComputer J1010 does not support SSD expansion is because the carrier board is not equipped with a suitable M.2 slot.
-
-
-
-
Product
-
reComputer J1020
-
reComputer J2011
-
reComputer J2012
-
reComputer J2021
-
-
-
SKU
-
110061361
-
110061363
-
110061401
-
110061381
-
-
-
Side View
-
-
-
-
-
-
-
Equipped Module
-
Jetson Nano 4G
-
Jetson Xavier NX 8GB
-
Jetson Xavier NX 16GB
-
Jetson Xavier NX 8GB
-
-
-
Operating carrier Board
-
Jetson A206
-
Jetson A206
-
Jetson A206
-
J202
-
-
-
-
-### Software And Hardware Requirements
-
-The following conditions need to be met for the expansion solution using SSDs, which are the basic requirements for the expansion to be proven to be successful.
-
-
SSD need to be fourth generation extended file system (Ext4)
- M.2 M-Key interface with NVMe protocol
- Recommended capacity ≤ 512 GB
-
-
-
-
-!!!Attention
- The updated JetPack version has not been tested for expansion, so the stability or success of the expansion cannot be guaranteed, please follow this tutorial carefully.
-
- The SSD needs to be M.2 M-Key, otherwise it will not match the interface on the carrier board.
-
-
- Storage devices with non-extended fourth generation file systems (Ext4) cannot complete expansion operations.
-
-### Expansion steps
-
-**Step 1.** Install the SSD
-
-Follow the steps in the [Hardware Instructions](https://wiki.seeedstudio.com/reComputer_Jetson_Series_Hardware_Layout/) to install the SSD for reComputer.
-
-**Step 2.** Prepare SSD
-
-Use the shortcut `Ctrl+F` or click the Ubuntu icon in the upper left corner to search for **Disks** and open the Disks tool that comes with Ubuntu 18.04.
-
-
-
-Select your SSD on the left side and then select **Format Disk** in the upper right corner under the menu bar.
-
-
-
-Format your SSD to GPT format. A pop-up window will appear asking you to confirm and enter your user password.
-
-
-
-Then, we click on the middle **+** to add a disk character.
-
-
-
-Click on "Next".
-
-
-
-Please give your SSD a name and select **Ext4** in the type and click "Create". At this point we have completed the SSD prep according to the expansion requirements.
-
-
-
-**Step 3.** Build the root directory to the SSD
-
-Use the git command to download the script files we need to use to reComputer.
-
-```sh
-git clone https://github.com/limengdu/rootOnNVMe.git
-cd rootOnNVMe/
-```
-
-Then execute the following command to build the files from the root directory in the eMMC to the SSD, the wait time for this step depends on the size of the root directory you are using.
-
-```sh
-./copy-rootfs-ssd.sh
-```
-
-**Step 4.** Configure the environment and complete the expansion
-
-Execute the following command to complete the configuration of rootfs.
-
-```sh
-./setup-service.sh
-```
-
-
-
-When you restart reComputer, you will see that the eMMC has become an external storage device on the main interface, and you will see that the system footprint has been reduced, so the expansion was successful.
-
-
-
-!!!Attention
- The default SSD path in the script file is `/dev/nvme0n1p1`, which is also the path assigned by default by reComputer. If you find that your SSD path does not match this with the command `sudo fdisk -l`, change the path of all `/dev/nvme0n1p1` in the files **copy-rootfs-ssd.sh**, **data/setssdroot.service**, and **data/setssdroot.sh** in rootOnNVMe to the path where your SSD is located.
-
-
- The above expansion will not remove the original root directory contents from the eMMC. If you do not want to boot from the SSD, you can remove the SSD and the system will still boot from the eMMC.
-
-## Capacity expansion via USB storage device
-
-USB storage devices, such as USB flash drives and mobile hard drives, are widely used as external storage in various areas of life, and USB expansion is also applicable to reComputer. The following table lists the reComputer products that are currently available for USB expansion solutions.
-
-
-
-
Product
-
reComputer J1010
-
-
-
SKU
-
110061362
-
-
-
Side View
-
-
-
-
Equipped Module
-
Jetson Nano 4G
-
-
-
Operating carrier Board
-
J1010 carrier board
-
-
-
-
-The biggest advantage of scaling via USB storage devices over scaling via SSDs is the high degree of convenience of USB devices and the simplicity of removing them.
-However, even with the high-speed USB 3.2 interface, the data transfer rate is far less than that of the standard PCIe bus, so the SSD expansion method is superior in terms of stability, reliability and data transfer speed.
-
-### Software And Hardware Requirements
-
-The following conditions need to be met for the expansion solution using USB, which is the basic requirement to verify that the expansion can be done successfully.
-
-
-
-
-
software and hardware requirements
-
-
-
reComputer for Jetson
-
JetPack versions 4.4 ~ 4.6
- Equipped Module needs to be Jetson Nano
-
-
-
USB storage devices
-
USB storage devices need to be fourth generation extended file system (Ext4)
- USB storage device power supply current ≤ 0.5 A
-
-
-
-
-!!!Attention
- The updated JetPack version has not been tested for expansion, so the stability or success of the expansion cannot be guaranteed, please follow this tutorial carefully.
-
- Large-capacity USB storage devices require that the reComputer be powered properly to maintain proper operation, and USB storage devices with capacities above 512 GB are not recommended. Insufficient power supply may cause reComputer to power down.
-
- Equipped Module other than Jetson Nano do not support expansion using this method at this time.
-
- Storage devices with non-extended fourth generation file systems (Ext4) cannot complete expansion operations.
-
-### Expansion steps
-
-**Step 1.** Prepare the necessary documents
-
-Use the git command to download the script files we need to use to reComputer.
-
-```sh
-git clone https://github.com/limengdu/bootFromUSB.git
-cd bootFromUSB
-```
-
-**Step 2.** Preparing the USB storage device
-
-Connect a USB storage device to reComputer and open the Disks tool that comes with Ubuntu 18.04 by using the shortcut `Ctrl+F` or by clicking the Ubuntu icon in the upper left corner and searching for **Disks**.
-
-
-
-Select your USB storage device on the left side and then select **Format Disk** in the upper right corner under the menu bar.
-
-
-
-Format your USB storage device to GPT format. A pop-up window will appear asking you to confirm and enter your user password.
-
-
-
-Then, we click on the middle **+** to add a disk character.
-
-
-
-Click on "Next".
-
-
-
-Please give your USB storage device a name and select **Ext4** in the type and click "Create". At this point we have completed the USB storage device prep according to the expansion requirements.
-
-
-
-**Step 3.** Mounting a USB storage device
-
-The USB storage device prepared according to **step 2** can be seen in the Disks software as unmounted.
-
-!!!Note
- If you find that your USB device has been automatically mounted after formatting, skip this step.
-
-
-
-We use the following command to mount the USB device.
-
-```sh
-mkdir /media/USB/
-sudo mount /media/USB/
-```
-
-Where `` refers to the path of the USB storage device, this parameter can be seen in Device of the Disks software or can be queried with the command `sudo fdisk -l`. For example, for my USB device, I can mount `/dev/sda1` to `/media/USB/` with the following command.
-
-```sh
-sudo mount /dev/sda1 /media/USB/
-```
-
-Use the following command to check the mount location of the device.
-
-```sh
-sudo findmnt -rno TARGET
-```
-
-For my USB device, the commands I need to use are:
-
-```sh
-sudo findmnt -rno TARGET /dev/sda1
-```
-
-**Step 4.** Copy the system to a USB storage device
-
-The **copyRootToUSB.sh** script copies the contents of the entire eMMC system to the USB storage device. Of course, the USB storage device should have more storage space than the eMMC.
-
-The command used is as follows.
-
-```sh
-usage: ./copyRootToUSB.sh [OPTIONS]
--d | --directory Directory path to parent of kernel
-
--v | --volume_label Label of Volume to lookup
-
--p | --path Device Path to USB drive (e.g. /dev/sda1)
-
--h | --help This message
-```
-
-In general, for regular expansion needs, we can just select `-p` in the parameter `[OPTIONS]` and later we need to add the path of the USB device (e.g. `/dev/sda1`), which we got in **step 3**. For example, for my USB device, the full command I need to use is:
-
-```sh
-./copyRootToUSB.sh -p /dev/sda1
-```
-
-The length of time this command takes to execute depends on the size of the files stored on your eMMC.
-
-**Step 5.** Querying the UUID of USB devices
-
-Just to be sure, we need to look up the UUID of the USB device.
-
-```sh
-./partUUID.sh
-```
-
-The default path for this command is **sda1 (/dev/sda1)**, but you can also determine the UUID of other USB devices. specify `/dev/ using` the `-d` flag. For example, for my USB device it would be:
-
-```sh
-$ ./partUUID.sh -d sdb1
-
-UUID of Disk: /dev/sdb1
-e34d67bb-83bb-4fc5-b9a4-a1388d2b2be5
-Sample for /boot/extlinux/extlinux.conf entry:
-APPEND ${cbootargs} root=UUID=e34d67bb-83bb-4fc5-b9a4-a1388d2b2be5 rootwait rootfstype=ext4
-```
-
-!!!Attention
- If the returned UUID differs in format and length from the example above, then the device is probably not formatted as Ext4, start over from **step 2**!
-
-**Step 6.** Modify the boot configuration to complete the expansion
-
-We need to make a backup of the boot configuration file first.
-
-```sh
-sudo cp /boot/extlinux/extlinux.conf /boot/extlinux/extlinux.conf.bak
-```
-
-This step is the most important and dangerous step in the USB device expansion operation. Edit the `/boot/extlinux/extlinux.conf` file and `/media/nvidia/boot/extlinux/extlinux.conf`, then add an entry to point to the new rootfs, the location is the path of the USB device, fill it in the parameter `` below. The path information is obtained in **step 3**.
-
-```sh
-$ sudo vi /boot/extlinux/extlinux.conf
-$ sudo vi /media/nvidia/boot/extlinux/extlinux.conf
-
-LABEL primary
- MENU LABEL primary kernel
- LINUX /boot/Image
- INITRD /boot/initrd
- APPEND ${cbootargs} quiet root= rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
-```
-
-For the USB storage device I am using, the modified `/boot/extlinux/extlinux.conf` file and `/media/nvidia/boot/extlinux/extlinux.conf` reads as follows:
-
-```sh
-TIMEOUT 30
-DEFAULT primary
-
-MENU TITLE L4T boot options
-
-LABEL primary
- MENU LABEL primary kernel
- LINUX /boot/Image
- INITRD /boot/initrd
- APPEND ${cbootargs} quiet root=/dev/sda1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
-# APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
-
-# When testing a custom kernel, it is recommended that you create a backup of
-# the original kernel and add a new entry to this file so that the device can
-# fallback to the original kernel. To do this:
-#
-# 1, Make a backup of the original kernel
-# sudo cp /boot/Image /boot/Image.backup
-#
-# 2, Copy your custom kernel into /boot/Image
-#
-# 3, Uncomment below menu setting lines for the original kernel
-#
-# 4, Reboot
-
-# LABEL backup
-# MENU LABEL backup kernel
-# LINUX /boot/Image.backup
-# INITRD /boot/initrd
-# APPEND ${cbootargs}
-```
-
-Save the file and restart reComputer, the system root will switch to the USB storage device and the expansion is complete.
-
-
-
-## Restore System Backup Via Serial Console
-
-When your system does not boot properly due to an error, or for some other reason (a common scenario is that the Nvidia icon keeps recurring on boot), then the backup you made during the expansion will play an important role. We understand your anxiety at this moment, but please be patient and follow the steps below to get reComputer into the serial console and we will operate the U-boot to restore your backup.
-
-### Material Preparation
-
-
-
-### Steps to access the serial console
-
-**Step 1.** Connecting the UART to USB module to the reComputer
-
-Connect the reComputer to the UART to USB module according to the wiring instructions in the table below.
-
-
-
-
-
-
-
reComputer
-
-
UART to USB module
-
-
-
GND
-
-->
-
GND
-
-
-
UART TXD
-
-->
-
RX
-
-
-
UART RXD
-
-->
-
TX
-
-
-
-
-!!!Tip
- The VCC interface between the reComputer and the UART to USB module does not need to be connected.
-
- The reComputer does not need to be powered on for the time being after the cable is connected, so please set it aside for now.
-
- Please disconnect the expanded external memory.
-
-**Step 2.** Install and start minicom on the Ubuntu host
-
-If your Ubuntu host does not have minicom installed, you can install minicom on your computer with the following command.
-
-```sh
-sudo apt-get install minicom
-```
-
-After waiting for the installation to complete, enter the command to start minicom.
-
-```sh
-sudo minicom
-```
-
-
-
-**Step 3.** Preparing to configure minicom
-
-In the minicom menu bar, we open the serial port and configure it so that we can get the reComputer startup information through minicom. In the menu bar, press the keyboard **o** key to access the configuration screen. Use the keyboard up and down arrow keys to control the cursor to move to **Serial port setup**.
-
-
-
-**Step 4.** Connecting reComputer to the Ubuntu host
-
-At this moment, we create a new command line window and enter commands in the window to monitor the access of the new device.
-
-```sh
-dmesg --follow
-```
-
-At this point we will power up the reComputer and connect the UART to USB module with the reComputer connected to the Ubuntu host via the USB port. The command line window will show the name of the newly connected device, we need to find the fragment starting with **tty** and write it down.
-
-
-
-**Step 5.** U-boot operation
-
-Go back to minicom and fill in the device name obtained in **step 4** into **Serial Device**. Also, check whether the baud rate is configured to **115200**.
-
-
-
-After modifying, enter to save. Select **Save setup as dfl** and exit the minicom interface.
-
-
-
-Re-enter the command `sudo minicom` and after entering minicom, we will see the reComputer startup information in the window.
-
-
-
-We can troubleshoot why reComputer fails to boot by using the information returned and by using the command help to see all the commands available under the U-boot system. Knowing how to use these commands is necessary to solve the problem, but of course it can be difficult.
-
-```sh
-Tegra210 (P3450-0000) # help
-? - alias for 'help'
-base - print or set address offset
-bdinfo - print Board Info structure
-blkcache - block cache diagnostics and control
-boot - boot default, i.e., run 'bootcmd'
-bootd - boot default, i.e., run 'bootcmd'
-bootefi - Boots an EFI payload from memory
-bootelf - Boot from an ELF image in memory
-booti - boot Linux kernel 'Image' format from memory
-bootm - boot application image from memory
-bootp - boot image via network using BOOTP/TFTP protocol
-bootvx - Boot vxWorks from an ELF image
-cmp - memory compare
-coninfo - print console devices and information
-cp - memory copy
-crc32 - checksum calculation
-dcache - enable or disable data cache
-dfu - Device Firmware Upgrade
-dhcp - boot image via network using DHCP/TFTP protocol
-dm - Driver model low level access
-echo - echo args to console
-editenv - edit environment variable
-enterrcm - reset Tegra and enter USB Recovery Mode
-env - environment handling commands
-exit - exit script
-ext2load - load binary file from a Ext2 filesystem
-ext2ls - list files in a directory (default /)
-ext4load - load binary file from a Ext4 filesystem
-ext4ls - list files in a directory (default /)
-ext4size - determine a file's size
-ext4write - create a file in the root directory
-false - do nothing, unsuccessfully
-fatinfo - print information about filesystem
-fatload - load binary file from a dos filesystem
-fatls - list files in a directory (default /)
-fatmkdir - create a directory
-fatrm - delete a file
-fatsize - determine a file's size
-fatwrite - write file into a dos filesystem
-fdt - flattened device tree utility commands
-fstype - Look up a filesystem type
-go - start application at address 'addr'
-gpio - query and control gpio pins
-gzwrite - unzip and write memory to block device
-help - print command description/usage
-i2c - I2C sub-system
-icache - enable or disable instruction cache
-imxtract - extract a part of a multi-image
-itest - return true/false on integer compare
-ln - Create a symbolic link
-load - load binary file from a filesystem
-loadb - load binary file over serial line (kermit mode)
-loads - load S-Record file over serial line
-loadx - load binary file over serial line (xmodem mode)
-loady - load binary file over serial line (ymodem mode)
-loop - infinite loop on address range
-ls - list files in a directory (default /)
-lzmadec - lzma uncompress a memory region
-md - memory display
-mii - MII utility commands
-mm - memory modify (auto-incrementing address)
-mmc - MMC sub system
-mmcinfo - display MMC info
-mw - memory write (fill)
-nm - memory modify (constant address)
-nvme - NVM Express sub-system
-part - disk partition related commands
-pci - list and access PCI Configuration Space
-ping - send ICMP ECHO_REQUEST to network host
-printenv - print environment variables
-pxe - commands to get and boot from pxe files
-reset - Perform RESET of the CPU
-run - run commands in an environment variable
-save - save file to a filesystem
-saveenv - save environment variables to persistent storage
-setenv - set environment variables
-sf - SPI flash sub-system
-showvar - print local hushshell variables
-size - determine a file's size
-sleep - delay execution for some time
-source - run script from memory
-sspi - SPI utility command
-sysboot - command to get and boot from syslinux files
-test - minimal test like /bin/sh
-tftpboot - boot image via network using TFTP protocol
-true - do nothing, successfully
-ums - Use the UMS [USB Mass Storage]
-unzip - unzip a memory region
-usb - USB sub-system
-usbboot - boot from USB device
-version - print monitor, compiler and linker version
-```
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: Memory Expansion
+title: Memory Expansion
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Memory_Expansion
+last_update:
+ date: 01/05/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# reComputer for Jetson Memory Expansion
+
+The reComputer for Jetson is sold with 16 GB of eMMC and has **ubuntu 18.04 LTS** and **NVIDIA JetPack 4.6** installed, so the remaining user space available is about 2 GB, which is a significant obstacle to using the reComputer for training and deployment in some projects. This tutorial will introduce the expansion process for different models of reComputer based on this situation, and help developers to expand their systems by transferring them to external storage devices.
+
+## Fundamentals Of Capacity Expansion
+
+The first sector on the disk where the system is installed is called the **Master Boot Record (MBR)**, which contains information about the **BootLoader**, the partition table, and the fixed identifier **55AA**. During the boot process of Linux, the **BootLoader** and the **kernel** go through two important phases.
+
+**Phase 1:** The BootLoader initializes **(initrd)** a temporary root file system **(ramfs)**. The ramfs contains configuration programs for drivers, file systems (fs), networks (net), etc. that are necessary at boot time. After that, control of the BootLoader is transferred to the kernel so that the kernel can take out these programs, move them to memory **(RAM)** and run them to load the various functional modules.
+
+**Phase 2:** After the kernel has loaded the necessary modules with the ramfs, it releases the system and configures the real root file system **(rootfs)** to mount to the real root directory.
+
+1. In the above two phases, we do not need to modify the part of the kernel that loads the functional modules with the ramfs (phase 1), so even if reComputer has been expanded, it will still need to use eMMC.
+2. What we need to modify is the second phase, which mounts the root filesystem to external memory, thus enabling the expansion.
+
+
+
+## Notes On Capacity Expansion
+
+1. The main principle of scaling via external storage is to set the rootfs to be on an external storage device.
+
+2. This expansion method will modify the Linux kernel level system files and you may encounter some problems that are not easy to solve. You should use a new reComputer and a new storage device when following this tutorial to complete the expansion, and **do not try to store valuable files on the device**. If everything does not work as expected, you may need to reformat the storage device or even the reComputer, and for the final retention option, we will offer to help you restore the backup via the serial port if possible, but you are responsible for any data loss.
+
+3. This expansion process does not require recompiling the kernel and saves about 40 minutes of installation time compared to other earlier expansion methods available online.
+
+## Expansion Via M.2 Slot On Carrier Board And SSD
+
+SSD, also known as Solid State Drives, is often used as the primary storage device for laptops, desktops, etc. With its high reliability and fast data read and write rates, it is the best choice for reComputer expansion. The following table lists the reComputer Series products that are currently available for SSD expansion solutions. The main reason why the reComputer J1010 does not support SSD expansion is because the carrier board is not equipped with a suitable M.2 slot.
+
+
+
+
Product
+
reComputer J1020
+
reComputer J2011
+
reComputer J2012
+
reComputer J2021
+
+
+
SKU
+
110061361
+
110061363
+
110061401
+
110061381
+
+
+
Side View
+
+
+
+
+
+
+
Equipped Module
+
Jetson Nano 4G
+
Jetson Xavier NX 8GB
+
Jetson Xavier NX 16GB
+
Jetson Xavier NX 8GB
+
+
+
Operating carrier Board
+
Jetson A206
+
Jetson A206
+
Jetson A206
+
J202
+
+
+
+
+### Software And Hardware Requirements
+
+The following conditions need to be met for the expansion solution using SSDs, which are the basic requirements for the expansion to be proven to be successful.
+
+
SSD need to be fourth generation extended file system (Ext4)
+ M.2 M-Key interface with NVMe protocol
+ Recommended capacity ≤ 512 GB
+
+
+
+
+!!!Attention
+ The updated JetPack version has not been tested for expansion, so the stability or success of the expansion cannot be guaranteed, please follow this tutorial carefully.
+
+ The SSD needs to be M.2 M-Key, otherwise it will not match the interface on the carrier board.
+
+
+ Storage devices with non-extended fourth generation file systems (Ext4) cannot complete expansion operations.
+
+### Expansion steps
+
+**Step 1.** Install the SSD
+
+Follow the steps in the [Hardware Instructions](https://wiki.seeedstudio.com/reComputer_Jetson_Series_Hardware_Layout/) to install the SSD for reComputer.
+
+**Step 2.** Prepare SSD
+
+Use the shortcut `Ctrl+F` or click the Ubuntu icon in the upper left corner to search for **Disks** and open the Disks tool that comes with Ubuntu 18.04.
+
+
+
+Select your SSD on the left side and then select **Format Disk** in the upper right corner under the menu bar.
+
+
+
+Format your SSD to GPT format. A pop-up window will appear asking you to confirm and enter your user password.
+
+
+
+Then, we click on the middle **+** to add a disk character.
+
+
+
+Click on "Next".
+
+
+
+Please give your SSD a name and select **Ext4** in the type and click "Create". At this point we have completed the SSD prep according to the expansion requirements.
+
+
+
+**Step 3.** Build the root directory to the SSD
+
+Use the git command to download the script files we need to use to reComputer.
+
+```sh
+git clone https://github.com/limengdu/rootOnNVMe.git
+cd rootOnNVMe/
+```
+
+Then execute the following command to build the files from the root directory in the eMMC to the SSD, the wait time for this step depends on the size of the root directory you are using.
+
+```sh
+./copy-rootfs-ssd.sh
+```
+
+**Step 4.** Configure the environment and complete the expansion
+
+Execute the following command to complete the configuration of rootfs.
+
+```sh
+./setup-service.sh
+```
+
+
+
+When you restart reComputer, you will see that the eMMC has become an external storage device on the main interface, and you will see that the system footprint has been reduced, so the expansion was successful.
+
+
+
+!!!Attention
+ The default SSD path in the script file is `/dev/nvme0n1p1`, which is also the path assigned by default by reComputer. If you find that your SSD path does not match this with the command `sudo fdisk -l`, change the path of all `/dev/nvme0n1p1` in the files **copy-rootfs-ssd.sh**, **data/setssdroot.service**, and **data/setssdroot.sh** in rootOnNVMe to the path where your SSD is located.
+
+
+ The above expansion will not remove the original root directory contents from the eMMC. If you do not want to boot from the SSD, you can remove the SSD and the system will still boot from the eMMC.
+
+## Capacity expansion via USB storage device
+
+USB storage devices, such as USB flash drives and mobile hard drives, are widely used as external storage in various areas of life, and USB expansion is also applicable to reComputer. The following table lists the reComputer products that are currently available for USB expansion solutions.
+
+
+
+
Product
+
reComputer J1010
+
+
+
SKU
+
110061362
+
+
+
Side View
+
+
+
+
Equipped Module
+
Jetson Nano 4G
+
+
+
Operating carrier Board
+
J1010 carrier board
+
+
+
+
+The biggest advantage of scaling via USB storage devices over scaling via SSDs is the high degree of convenience of USB devices and the simplicity of removing them.
+However, even with the high-speed USB 3.2 interface, the data transfer rate is far less than that of the standard PCIe bus, so the SSD expansion method is superior in terms of stability, reliability and data transfer speed.
+
+### Software And Hardware Requirements
+
+The following conditions need to be met for the expansion solution using USB, which is the basic requirement to verify that the expansion can be done successfully.
+
+
+
+
+
software and hardware requirements
+
+
+
reComputer for Jetson
+
JetPack versions 4.4 ~ 4.6
+ Equipped Module needs to be Jetson Nano
+
+
+
USB storage devices
+
USB storage devices need to be fourth generation extended file system (Ext4)
+ USB storage device power supply current ≤ 0.5 A
+
+
+
+
+!!!Attention
+ The updated JetPack version has not been tested for expansion, so the stability or success of the expansion cannot be guaranteed, please follow this tutorial carefully.
+
+ Large-capacity USB storage devices require that the reComputer be powered properly to maintain proper operation, and USB storage devices with capacities above 512 GB are not recommended. Insufficient power supply may cause reComputer to power down.
+
+ Equipped Module other than Jetson Nano do not support expansion using this method at this time.
+
+ Storage devices with non-extended fourth generation file systems (Ext4) cannot complete expansion operations.
+
+### Expansion steps
+
+**Step 1.** Prepare the necessary documents
+
+Use the git command to download the script files we need to use to reComputer.
+
+```sh
+git clone https://github.com/limengdu/bootFromUSB.git
+cd bootFromUSB
+```
+
+**Step 2.** Preparing the USB storage device
+
+Connect a USB storage device to reComputer and open the Disks tool that comes with Ubuntu 18.04 by using the shortcut `Ctrl+F` or by clicking the Ubuntu icon in the upper left corner and searching for **Disks**.
+
+
+
+Select your USB storage device on the left side and then select **Format Disk** in the upper right corner under the menu bar.
+
+
+
+Format your USB storage device to GPT format. A pop-up window will appear asking you to confirm and enter your user password.
+
+
+
+Then, we click on the middle **+** to add a disk character.
+
+
+
+Click on "Next".
+
+
+
+Please give your USB storage device a name and select **Ext4** in the type and click "Create". At this point we have completed the USB storage device prep according to the expansion requirements.
+
+
+
+**Step 3.** Mounting a USB storage device
+
+The USB storage device prepared according to **step 2** can be seen in the Disks software as unmounted.
+
+!!!Note
+ If you find that your USB device has been automatically mounted after formatting, skip this step.
+
+
+
+We use the following command to mount the USB device.
+
+```sh
+mkdir /media/USB/
+sudo mount /media/USB/
+```
+
+Where `` refers to the path of the USB storage device, this parameter can be seen in Device of the Disks software or can be queried with the command `sudo fdisk -l`. For example, for my USB device, I can mount `/dev/sda1` to `/media/USB/` with the following command.
+
+```sh
+sudo mount /dev/sda1 /media/USB/
+```
+
+Use the following command to check the mount location of the device.
+
+```sh
+sudo findmnt -rno TARGET
+```
+
+For my USB device, the commands I need to use are:
+
+```sh
+sudo findmnt -rno TARGET /dev/sda1
+```
+
+**Step 4.** Copy the system to a USB storage device
+
+The **copyRootToUSB.sh** script copies the contents of the entire eMMC system to the USB storage device. Of course, the USB storage device should have more storage space than the eMMC.
+
+The command used is as follows.
+
+```sh
+usage: ./copyRootToUSB.sh [OPTIONS]
+-d | --directory Directory path to parent of kernel
+
+-v | --volume_label Label of Volume to lookup
+
+-p | --path Device Path to USB drive (e.g. /dev/sda1)
+
+-h | --help This message
+```
+
+In general, for regular expansion needs, we can just select `-p` in the parameter `[OPTIONS]` and later we need to add the path of the USB device (e.g. `/dev/sda1`), which we got in **step 3**. For example, for my USB device, the full command I need to use is:
+
+```sh
+./copyRootToUSB.sh -p /dev/sda1
+```
+
+The length of time this command takes to execute depends on the size of the files stored on your eMMC.
+
+**Step 5.** Querying the UUID of USB devices
+
+Just to be sure, we need to look up the UUID of the USB device.
+
+```sh
+./partUUID.sh
+```
+
+The default path for this command is **sda1 (/dev/sda1)**, but you can also determine the UUID of other USB devices. specify `/dev/ using` the `-d` flag. For example, for my USB device it would be:
+
+```sh
+$ ./partUUID.sh -d sdb1
+
+UUID of Disk: /dev/sdb1
+e34d67bb-83bb-4fc5-b9a4-a1388d2b2be5
+Sample for /boot/extlinux/extlinux.conf entry:
+APPEND ${cbootargs} root=UUID=e34d67bb-83bb-4fc5-b9a4-a1388d2b2be5 rootwait rootfstype=ext4
+```
+
+!!!Attention
+ If the returned UUID differs in format and length from the example above, then the device is probably not formatted as Ext4, start over from **step 2**!
+
+**Step 6.** Modify the boot configuration to complete the expansion
+
+We need to make a backup of the boot configuration file first.
+
+```sh
+sudo cp /boot/extlinux/extlinux.conf /boot/extlinux/extlinux.conf.bak
+```
+
+This step is the most important and dangerous step in the USB device expansion operation. Edit the `/boot/extlinux/extlinux.conf` file and `/media/nvidia/boot/extlinux/extlinux.conf`, then add an entry to point to the new rootfs, the location is the path of the USB device, fill it in the parameter `` below. The path information is obtained in **step 3**.
+
+```sh
+$ sudo vi /boot/extlinux/extlinux.conf
+$ sudo vi /media/nvidia/boot/extlinux/extlinux.conf
+
+LABEL primary
+ MENU LABEL primary kernel
+ LINUX /boot/Image
+ INITRD /boot/initrd
+ APPEND ${cbootargs} quiet root= rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
+```
+
+For the USB storage device I am using, the modified `/boot/extlinux/extlinux.conf` file and `/media/nvidia/boot/extlinux/extlinux.conf` reads as follows:
+
+```sh
+TIMEOUT 30
+DEFAULT primary
+
+MENU TITLE L4T boot options
+
+LABEL primary
+ MENU LABEL primary kernel
+ LINUX /boot/Image
+ INITRD /boot/initrd
+ APPEND ${cbootargs} quiet root=/dev/sda1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
+# APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
+
+# When testing a custom kernel, it is recommended that you create a backup of
+# the original kernel and add a new entry to this file so that the device can
+# fallback to the original kernel. To do this:
+#
+# 1, Make a backup of the original kernel
+# sudo cp /boot/Image /boot/Image.backup
+#
+# 2, Copy your custom kernel into /boot/Image
+#
+# 3, Uncomment below menu setting lines for the original kernel
+#
+# 4, Reboot
+
+# LABEL backup
+# MENU LABEL backup kernel
+# LINUX /boot/Image.backup
+# INITRD /boot/initrd
+# APPEND ${cbootargs}
+```
+
+Save the file and restart reComputer, the system root will switch to the USB storage device and the expansion is complete.
+
+
+
+## Restore System Backup Via Serial Console
+
+When your system does not boot properly due to an error, or for some other reason (a common scenario is that the Nvidia icon keeps recurring on boot), then the backup you made during the expansion will play an important role. We understand your anxiety at this moment, but please be patient and follow the steps below to get reComputer into the serial console and we will operate the U-boot to restore your backup.
+
+### Material Preparation
+
+
+
+### Steps to access the serial console
+
+**Step 1.** Connecting the UART to USB module to the reComputer
+
+Connect the reComputer to the UART to USB module according to the wiring instructions in the table below.
+
+
+
+
+
+
+
reComputer
+
+
UART to USB module
+
+
+
GND
+
-->
+
GND
+
+
+
UART TXD
+
-->
+
RX
+
+
+
UART RXD
+
-->
+
TX
+
+
+
+
+!!!Tip
+ The VCC interface between the reComputer and the UART to USB module does not need to be connected.
+
+ The reComputer does not need to be powered on for the time being after the cable is connected, so please set it aside for now.
+
+ Please disconnect the expanded external memory.
+
+**Step 2.** Install and start minicom on the Ubuntu host
+
+If your Ubuntu host does not have minicom installed, you can install minicom on your computer with the following command.
+
+```sh
+sudo apt-get install minicom
+```
+
+After waiting for the installation to complete, enter the command to start minicom.
+
+```sh
+sudo minicom
+```
+
+
+
+**Step 3.** Preparing to configure minicom
+
+In the minicom menu bar, we open the serial port and configure it so that we can get the reComputer startup information through minicom. In the menu bar, press the keyboard **o** key to access the configuration screen. Use the keyboard up and down arrow keys to control the cursor to move to **Serial port setup**.
+
+
+
+**Step 4.** Connecting reComputer to the Ubuntu host
+
+At this moment, we create a new command line window and enter commands in the window to monitor the access of the new device.
+
+```sh
+dmesg --follow
+```
+
+At this point we will power up the reComputer and connect the UART to USB module with the reComputer connected to the Ubuntu host via the USB port. The command line window will show the name of the newly connected device, we need to find the fragment starting with **tty** and write it down.
+
+
+
+**Step 5.** U-boot operation
+
+Go back to minicom and fill in the device name obtained in **step 4** into **Serial Device**. Also, check whether the baud rate is configured to **115200**.
+
+
+
+After modifying, enter to save. Select **Save setup as dfl** and exit the minicom interface.
+
+
+
+Re-enter the command `sudo minicom` and after entering minicom, we will see the reComputer startup information in the window.
+
+
+
+We can troubleshoot why reComputer fails to boot by using the information returned and by using the command help to see all the commands available under the U-boot system. Knowing how to use these commands is necessary to solve the problem, but of course it can be difficult.
+
+```sh
+Tegra210 (P3450-0000) # help
+? - alias for 'help'
+base - print or set address offset
+bdinfo - print Board Info structure
+blkcache - block cache diagnostics and control
+boot - boot default, i.e., run 'bootcmd'
+bootd - boot default, i.e., run 'bootcmd'
+bootefi - Boots an EFI payload from memory
+bootelf - Boot from an ELF image in memory
+booti - boot Linux kernel 'Image' format from memory
+bootm - boot application image from memory
+bootp - boot image via network using BOOTP/TFTP protocol
+bootvx - Boot vxWorks from an ELF image
+cmp - memory compare
+coninfo - print console devices and information
+cp - memory copy
+crc32 - checksum calculation
+dcache - enable or disable data cache
+dfu - Device Firmware Upgrade
+dhcp - boot image via network using DHCP/TFTP protocol
+dm - Driver model low level access
+echo - echo args to console
+editenv - edit environment variable
+enterrcm - reset Tegra and enter USB Recovery Mode
+env - environment handling commands
+exit - exit script
+ext2load - load binary file from a Ext2 filesystem
+ext2ls - list files in a directory (default /)
+ext4load - load binary file from a Ext4 filesystem
+ext4ls - list files in a directory (default /)
+ext4size - determine a file's size
+ext4write - create a file in the root directory
+false - do nothing, unsuccessfully
+fatinfo - print information about filesystem
+fatload - load binary file from a dos filesystem
+fatls - list files in a directory (default /)
+fatmkdir - create a directory
+fatrm - delete a file
+fatsize - determine a file's size
+fatwrite - write file into a dos filesystem
+fdt - flattened device tree utility commands
+fstype - Look up a filesystem type
+go - start application at address 'addr'
+gpio - query and control gpio pins
+gzwrite - unzip and write memory to block device
+help - print command description/usage
+i2c - I2C sub-system
+icache - enable or disable instruction cache
+imxtract - extract a part of a multi-image
+itest - return true/false on integer compare
+ln - Create a symbolic link
+load - load binary file from a filesystem
+loadb - load binary file over serial line (kermit mode)
+loads - load S-Record file over serial line
+loadx - load binary file over serial line (xmodem mode)
+loady - load binary file over serial line (ymodem mode)
+loop - infinite loop on address range
+ls - list files in a directory (default /)
+lzmadec - lzma uncompress a memory region
+md - memory display
+mii - MII utility commands
+mm - memory modify (auto-incrementing address)
+mmc - MMC sub system
+mmcinfo - display MMC info
+mw - memory write (fill)
+nm - memory modify (constant address)
+nvme - NVM Express sub-system
+part - disk partition related commands
+pci - list and access PCI Configuration Space
+ping - send ICMP ECHO_REQUEST to network host
+printenv - print environment variables
+pxe - commands to get and boot from pxe files
+reset - Perform RESET of the CPU
+run - run commands in an environment variable
+save - save file to a filesystem
+saveenv - save environment variables to persistent storage
+setenv - set environment variables
+sf - SPI flash sub-system
+showvar - print local hushshell variables
+size - determine a file's size
+sleep - delay execution for some time
+source - run script from memory
+sspi - SPI utility command
+sysboot - command to get and boot from syslinux files
+test - minimal test like /bin/sh
+tftpboot - boot image via network using TFTP protocol
+true - do nothing, successfully
+ums - Use the UMS [USB Mass Storage]
+unzip - unzip a memory region
+usb - USB sub-system
+usbboot - boot from USB device
+version - print monitor, compiler and linker version
+```
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Hardware_Layout.md b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Hardware_Layout.md
index 3a4bb5513cd16..fd48c130b37c5 100644
--- a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Hardware_Layout.md
+++ b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Hardware_Layout.md
@@ -1,334 +1,333 @@
----
-description: reComputer for Jetson Series
-title: Hardware Layout for reComputer Series
-keywords:
- - Edge
- - reComputer
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Series_Hardware_Layout
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-# Hardware Layout for reComputer
-
-
-
-You will get the basic idea of the reComputer for Jetson Series hardware layout here. Meanwhile, you will know how to remove and install the core board from the carrier board, how to install the camera, M.2 Wi-Fi module or hard disk, etc.
-
-## reComputer Series Placement
-
-When facing the backplane of the reComputer interface, there are 4 anti-skid pads on the right side of the chassis for easy standing, as shown in the figure below.
-
-
-
-The bottom of the reComputer chassis is a suspended structure, and the chassis can be fixed on some inconvenient structures with binding tapes. The chassis bottom plate has 4 fixing holes to facilitate fixing on the facade or slope.
-
-
-
-## reComputer Series Top Cover
-
-When facing the backplane of the reComputer interface, there are 4 anti-skid pads on the right side of the chassis, where a metal button can be seen, as shown in the following figure:
-
-
-
-Push the button up to lift the top cover of the case, and then you can lift it open to remove the top cover.
-
-
-
-## Remove the Core Board from the Carrier Board
-
-After opening the chassis, you can see the module inserted on the carrier board, as shown in the following figure. The module can be removed from the carrier board by following the steps below.
-
-
-
-- **Step 1**: Before removing the core version, first you must confirm whether the fan power supply is connected. If it is, you need to unplug the fan power supply from the plug (For Jetson Nano there may not be a fan and you can skip this step).
-
-- **Step 2**. Remove the screws that hold the core plate with a cross screwdriver.
-
-
-
-- **Step 3**. Open the clamp on the carrier plate outward, and the core plate will spring up automatically.
-
-
-
-## Mount the Module on the Carrier Coard
-
-- **Step 1**. Find the corresponding Jetson SODIMM connector fingers on the carrier board and the connector on the module.
-
-
-
-- **Step 2**. Insert the module diagonally about 20 degrees into the slot of the carrier plate. Press down and it will be fixed on the carrier board.
-
-
-
-!!! Note
- You may find that under the correct installation there are a few connector fingers shown at the interface. It will be unstable once many connector fingers are exposed.
-
-
-- **Step 3**. Use a cross screwdriver to tighten the screws.
-
-
-
-- **Step 4**. If the module includes a cooling fan, plug the fan's power plug into the power socket on the carrier board.
-
-
-
-## Remove Carrier Coard from the reComputer Chassis
-
-When we want to install the M.2 module or CSI camera and other operations, we will need to remove the carrier board from the reComputer chassis for more easier operation. The carrier board is fixed to the chassis base with 4 screws, as shown in the following figure:
-
-
-
-Remove the 4 fixing screws as shown below:
-
-
-
-Take the carrier board together with the module out of the chassis:
-
-
-
-## Equip the reComputer with a Camera Module
-
-Both reComputer carrier boards have two CSI interfaces. The interfaces are usually used to connect a camera for some identification projects. Here we take the J1010 carrier board as an example to guide you to equip and use the [Raspberry Pi Camera Module V2](https://www.seeedstudio.com/Raspberry-Pi-Camera-Module-V2.html) on the reComputer.
-
-- **Step 1**. Mount the camera module on the carrier board
-
-!!!Note
- Before installation, please turn off the reComputer, unplug the power supply, and open the top cover of the chassis.
- For the convenience of demonstration below, we removed the carrier board from the chassis and the module. The actual operation only needs to open the top cover.
-
-Select the CSI connector you want to use, then gently flip up the black retention slots on both sides.
-
-
-
-Make sure to set the black slot aside before inserting the cable into the slot.
-
-
-
-Watch out the direction of the cable. You can see that the side of the cable pin is facing the carrier board, and the blue side is facing out.
-
-
-
-- **Step 2**. Power on and start reComputer.
-
-After plugging in the camera cable, make sure that the module, carrier board and peripherals are all installed in place. And then power on.
-
-- **Step 3**. Check if the camera is recognized.
-
-Enter the following command in the command line window to see if a camera device is currently available.
-
-```shell
-ls /dev/video0
-```
-
-If the output shows as below, it means that the camera has been successfully detected.
-
-
-
-If you don't see the device file, check whether your ribbon is oriented correctly and make sure your Raspberry Pi camera is V2 version as the V1 version is not recognized.
-
-- **Step 4**. Apply the Camera
-
-You can use the `sensor_mode` attribute with the GStreamer nvarguscamerasrc element to specify which camera. Valid values are 0 or 1 (defaults to 0 if not specified), i.e.
-
-```shell
-# Simple Test
-# Ctrl^C to exit
-# sensor_id selects the camera: 0 or 1 on Jetson Nano B01
-$ gst-launch-1.0 nvarguscamerasrc sensor_id=0 ! nvoverlaysink
-```
-
-You can use the following commands in the command line window to test the usage of the camera.
-
-After running this command, reComputer will display the screen captured by the camera in full screen until you press `Ctrl+C`.
-
-
-
-If you have more camera usage needs, you can refer to the [CSI-Camera project](https://github.com/JetsonHacksNano/CSI-Camera) to explore and learn by yourself.
-
-## Equip the Wireless Module for the reComputer
-
-Here we will show you how to install an M.2 Key E wireless module on the reComputer.
-
-Equipment and accessories required:
-
-- reComputer
-- [Intel® Dual Band Wireless-AC 8265 wireless module](https://www.intel.cn/content/www/cn/zh/products/sku/123742/intel-dual-band-wirelessac-8265-desktop-kit/specifications.html)
-- 2 x IPEX to SMA Female External Antenna Adapter and SMA Male Antenna for WIFI Module
-- Phillips screwdriver and screws
-
-
-
-!!!Note
- Installing the wireless module of the M.2 Key E requires additional antennas. Because the module is in the chassis, it may even be pressed between the module and the carrier board. Without antennas, the signal strength will be greatly affected.
-
-- **Step 1**. Detach the carrier board from the reComputer chassis
-
-Before installing the wireless module, detach the carrier board from the reComputer chassis as shown below:
-
-
-
-- **Step 2**. Remove the case silicone plug
-
-There are 4 reserved antenna openings in the chassis, where are plugged with silicone plugs, as shown in the figure below.
-
-
-
-Select the two outer holes, squeeze the silicone plug from the outside of the chassis to the inside of the chassis, and then pull out the silicone plug from the inside to expose the antenna hole.
-
-
-
-- **Step 3**. Install the SAM header
-
-As shown in the figure below, install the nut and nut of the SAM head to the wifi hole, paying attention to place the cable end in the chassis.
-
-
-
-- **Step 4**. Insert the wireless module into the M.2 Key E port
-
-!!!Note
- The M.2 Key E interface is on the bottom or top of the carrier board. For different carriers, please refer to Carrier Board Hardware Layout. Before installation, you may want to remove the core board from the carrier board.
-
-As shown in the figure below, find the M.2 Key E interface on the carrier board, and insert the wireless module into the interface slot.
-
-
-
-After the wireless module is firmly inserted, fix it with screws.
-
-
-
-- **Step 5**. Insert 2 IPEX plugs into the corresponding sockets of the wireless module, the connection is a button connection, as shown in the figure below. Simply press it and no more operations are required.
-
-
-
-The installation should be like the figure shown below. At this time, be careful not to break the wire between the wireless module and the SAM antenna base.
-
-
-
-- **Step 6**. Install the module to the chassis
-
-Place carefully the carrier board into the reComputer chassis and then install the screws.
-
-
-
-- **Step 7**. Equip antennas
-
-Install two SAM male antennas to the SAM female sockets and tighten. That will be all the hardware installation.
-
-
-
-- **Step 8**. Power on the reComputer and connect to the wireless network
-
-Connect the peripherals to the reComputer and then power on. Enter the system and open the network option in the upper right corner of the screen. After checking the **Enable Wi-Fi** option, you will see the nearby wireless network. Select the available wireless network connection.
-
-
-
-Congratulations, you have successfully installed the wireless module and connected to the network.
-
-## Hardware Layout
-
-### **J101 carrier board**
-
-**Top View**
-
-
-
-### **J202 carrier board**
-
-**Top View**
-
-
-
-**Bottom View**
-
-
-
-### **Jetson A206 carrier board(equipped with Jetson Nano)**
-
-*Click [here](https://files.seeedstudio.com/wiki/recomputer-Jetson-20-1-H1/A206-carrier-board.pdf) to check out the pins of Jetson A206 carrier board(equipped with Jetson Nano) to the operating interfaces.*
-
-**Top View**
-
-
-
-**Bottom View**
-
-
-
-### **Jetson A206 carrier board (equipped with Jetson Xavier NX)**
-
-*Click [here](https://files.seeedstudio.com/wiki/recomputer-Jetson-20-1-H1/A206-carrier-board.pdf) to check out the pins of Jetson A206 carrier board(equipped with Jetson Nano) to the operating interfaces.*
-
-**Top View**
-
-
-
-**Bottom View**
-
-
-
-## Detailed Comparison
-
-| Product | reComputer J1010 | reComputer J1020 | reComputer J2011 | reComputer J2012 |
-|:--------------------:|:------------------------------------------------------------------------------------------------------------------------------:|:------------------------------------------------------------------------:|:------------------------------------------------------------------------------------------------------------------------------:|:------------------------------------------------------------------------------------------------------------------------------:|
-| Module | Nano | Nano | Xavier NX | Xavier NX 16GB |
-| AI Perf | 472 GFLOPS | 472 GFLOPS | 21 TOPS | 21 TOPS |
-| GPU | 128-core NVIDIA Maxwell™ | 128-core NVIDIA Maxwell™ | 384-core NVIDIA Volta™ GPU | 384-core NVIDIA Volta™ GPU |
-| CPU | Quad-core ARM A57 @ 1.43 GHz | Quad-core ARM A57 @ 1.43 GHz | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6 MB L2 + 4 MB L3 | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6 MB L2 + 4 MB L3 |
-| Memory | 4GB 64-bit LPDDR4 25.6GB/s | 4GB 64-bit LPDDR4 25.6GB/s | 8 GB 128-bit LPDDR4x 59.7GB/s | 8 GB 128-bit LPDDR4x 59.7GB/s |
-| Storage | 16 GB eMMC | 16 GB eMMC | 16 GB eMMC | 16 GB eMMC |
-| VIDEO ENCODER | 4K30 \| 2x1080p60 \| 4x1080p30 \| 4x720p60 \| 9x720p30 (H.265 & H.264) | 4K30 \| 2x1080p60 \| 4x1080p30 \| 4x720p60 \| 9x720p30 (H.265 & H.264) | 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.265) 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 20x 108p30 (H.264) | 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.265) 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 20x 108p30 (H.264) |
-| VIDEO DECODER | 4K60 \| 2x 4K30 \| 4x 1080p60 \| 8x 1080p30 \| 9x 720p60 (H.265 & H.264) | 4K60 \| 2x 4K30 \| 4x 1080p60 \| 8x 1080p30 \| 9x 720p60 (H.265 & H.264) | 2x 8K30 \| 6x 4K60 \| 12x 4K30 \| 22x 1080p60 \| 44x 1080p30 (H.265) 2x 4K60 \| 6x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.264) | 2x 8K30 \| 6x 4K60 \| 12x 4K30 \| 22x 1080p60 \| 44x 1080p30 (H.265) 2x 4K60 \| 6x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.264) |
-| Gigabit Ethernet | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) |
-| USB | 1 x USB 3.0 Type A Connector; 2 x USB 2.0 Type A Connector; 1 x USB Type C for Device mode; 1 x USB Type C for 5V power input | 4 x USB 3.0 Type A Connector; 1 x Micro-USB port for Device mode; | 4 x USB 3.0 Type A Connector; 1 x Micro-USB port for Device mode; | 4 x USB 3.0 Type A Connector; 1 x Micro-USB port for Device mode; |
-| CSI Camera Connect | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) |
-| Display | 1x HDMI Type A | 1xHDMI Type A; 1xDP | 1xHDMI Type A; 1xDP | 1xHDMI Type A; 1xDP |
-| FAN | 1x FAN(5V PWM) | 1x FAN(5V PWM) | 1x FAN(5V PWM) | 1x FAN(5V PWM) |
-| M.2 KEY E | 1x M.2 Key E | 1x M.2 Key E(Disabled) | 1x M.2 Key E | 1x M.2 Key E |
-| M.2 KEY M | - | 1x M.2 Key M | 1x M.2 Key M | 1x M.2 Key M |
-| RTC | 1x RTC Socket | 1x RTC socket | 1x RTC Socket | 1x RTC Socket |
-| Multifunctional port | 1x 40-Pin header | 1x 40-Pin header | 1x 40-Pin header | 1x 40-Pin header |
-| Power | USB-Type C 5V⎓3A; | DC Jack 12V/2A | DC Jack 19V/4.74A (MAX 90W) MAX | DC Jack 19V/4.74A (MAX 90W) MAX |
-| Mechanical | 130 mm x 120 mm x 50 mm | 130mm x120mm x 50mm | 130mm x120mm x 50mm | 130mm x120mm x 50mm |
-| | | | | |
-
-## Carrier Board Technical Specification
-
-| Connector | J1010 Carrier Board | Jetson A206 Carrier Board |
-|--------------------------|--------------------------------------------------|--------------------------------------------------|
-| Jetson module connector | 1x Jetson SODIMM connector, 260-pin | 1x Jetson SODIMM connector, 260-pin |
-| USB Type A | 1x USB 3.0 Type-A Connector 2x USB 2.0 Type A connectors | 4x USB 3.0 Type-A Connectors |
-| USB Micro Type B | - | 1x USB Micro B, RA Female |
-| USB Type C | 2x Type C connector | - |
-| Ethernet Port | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) |
-| Display Port | 1xHDMI type A | 1xHDMI type A and 1xDP |
-| CSI Camera Connector | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) |
-| M.2 Key E | 1x M.2 Key E Slot (75-pin) 2230 | 1x M.2 Key E Slot (75-pin) 2230 |
-| M.2 Key M | - | 1x M.2 Key M Slot (75-pin) NVME 2280 |
-| Multifunctional Port | 2.0 Pitch 40 PIN | 2.0 Pitch 40 PIN |
-| Button Header | 1x Button Header (1x12, 2.54mm pitch, RA) | 1x Button Header (1x12, 2.54mm pitch, RA) |
-| FAN Connector | 1x Picoblade Header | 1x Picoblade Header |
-| CAN | Diasabled | 1x CAN Bus Header (1x4, 2.54mm pitch, RA) |
-| RTC | 1x RTC Back-up Coin Cell Socket (CR1220) | 1x RTC Back-up Coin Cell Socket (CR1225) |
-| Power | 1x Type C connector | 1x DC Input Power TE Connector |
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: reComputer for Jetson Series
+title: Hardware Layout for reComputer Series
+keywords:
+ - Edge
+ - reComputer
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Series_Hardware_Layout
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+# Hardware Layout for reComputer
+
+
+
+You will get the basic idea of the reComputer for Jetson Series hardware layout here. Meanwhile, you will know how to remove and install the core board from the carrier board, how to install the camera, M.2 Wi-Fi module or hard disk, etc.
+
+## reComputer Series Placement
+
+When facing the backplane of the reComputer interface, there are 4 anti-skid pads on the right side of the chassis for easy standing, as shown in the figure below.
+
+
+
+The bottom of the reComputer chassis is a suspended structure, and the chassis can be fixed on some inconvenient structures with binding tapes. The chassis bottom plate has 4 fixing holes to facilitate fixing on the facade or slope.
+
+
+
+## reComputer Series Top Cover
+
+When facing the backplane of the reComputer interface, there are 4 anti-skid pads on the right side of the chassis, where a metal button can be seen, as shown in the following figure:
+
+
+
+Push the button up to lift the top cover of the case, and then you can lift it open to remove the top cover.
+
+
+
+## Remove the Core Board from the Carrier Board
+
+After opening the chassis, you can see the module inserted on the carrier board, as shown in the following figure. The module can be removed from the carrier board by following the steps below.
+
+
+
+- **Step 1**: Before removing the core version, first you must confirm whether the fan power supply is connected. If it is, you need to unplug the fan power supply from the plug (For Jetson Nano there may not be a fan and you can skip this step).
+
+- **Step 2**. Remove the screws that hold the core plate with a cross screwdriver.
+
+
+
+- **Step 3**. Open the clamp on the carrier plate outward, and the core plate will spring up automatically.
+
+
+
+## Mount the Module on the Carrier Coard
+
+- **Step 1**. Find the corresponding Jetson SODIMM connector fingers on the carrier board and the connector on the module.
+
+
+
+- **Step 2**. Insert the module diagonally about 20 degrees into the slot of the carrier plate. Press down and it will be fixed on the carrier board.
+
+
+
+!!! Note
+ You may find that under the correct installation there are a few connector fingers shown at the interface. It will be unstable once many connector fingers are exposed.
+
+
+- **Step 3**. Use a cross screwdriver to tighten the screws.
+
+
+
+- **Step 4**. If the module includes a cooling fan, plug the fan's power plug into the power socket on the carrier board.
+
+
+
+## Remove Carrier Coard from the reComputer Chassis
+
+When we want to install the M.2 module or CSI camera and other operations, we will need to remove the carrier board from the reComputer chassis for more easier operation. The carrier board is fixed to the chassis base with 4 screws, as shown in the following figure:
+
+
+
+Remove the 4 fixing screws as shown below:
+
+
+
+Take the carrier board together with the module out of the chassis:
+
+
+
+## Equip the reComputer with a Camera Module
+
+Both reComputer carrier boards have two CSI interfaces. The interfaces are usually used to connect a camera for some identification projects. Here we take the J1010 carrier board as an example to guide you to equip and use the [Raspberry Pi Camera Module V2](https://www.seeedstudio.com/Raspberry-Pi-Camera-Module-V2.html) on the reComputer.
+
+- **Step 1**. Mount the camera module on the carrier board
+
+!!!Note
+ Before installation, please turn off the reComputer, unplug the power supply, and open the top cover of the chassis.
+ For the convenience of demonstration below, we removed the carrier board from the chassis and the module. The actual operation only needs to open the top cover.
+
+Select the CSI connector you want to use, then gently flip up the black retention slots on both sides.
+
+
+
+Make sure to set the black slot aside before inserting the cable into the slot.
+
+
+
+Watch out the direction of the cable. You can see that the side of the cable pin is facing the carrier board, and the blue side is facing out.
+
+
+
+- **Step 2**. Power on and start reComputer.
+
+After plugging in the camera cable, make sure that the module, carrier board and peripherals are all installed in place. And then power on.
+
+- **Step 3**. Check if the camera is recognized.
+
+Enter the following command in the command line window to see if a camera device is currently available.
+
+```shell
+ls /dev/video0
+```
+
+If the output shows as below, it means that the camera has been successfully detected.
+
+
+
+If you don't see the device file, check whether your ribbon is oriented correctly and make sure your Raspberry Pi camera is V2 version as the V1 version is not recognized.
+
+- **Step 4**. Apply the Camera
+
+You can use the `sensor_mode` attribute with the GStreamer nvarguscamerasrc element to specify which camera. Valid values are 0 or 1 (defaults to 0 if not specified), i.e.
+
+```shell
+# Simple Test
+# Ctrl^C to exit
+# sensor_id selects the camera: 0 or 1 on Jetson Nano B01
+$ gst-launch-1.0 nvarguscamerasrc sensor_id=0 ! nvoverlaysink
+```
+
+You can use the following commands in the command line window to test the usage of the camera.
+
+After running this command, reComputer will display the screen captured by the camera in full screen until you press `Ctrl+C`.
+
+
+
+If you have more camera usage needs, you can refer to the [CSI-Camera project](https://github.com/JetsonHacksNano/CSI-Camera) to explore and learn by yourself.
+
+## Equip the Wireless Module for the reComputer
+
+Here we will show you how to install an M.2 Key E wireless module on the reComputer.
+
+Equipment and accessories required:
+
+- reComputer
+- [Intel® Dual Band Wireless-AC 8265 wireless module](https://www.intel.cn/content/www/cn/zh/products/sku/123742/intel-dual-band-wirelessac-8265-desktop-kit/specifications.html)
+- 2 x IPEX to SMA Female External Antenna Adapter and SMA Male Antenna for WIFI Module
+- Phillips screwdriver and screws
+
+
+
+!!!Note
+ Installing the wireless module of the M.2 Key E requires additional antennas. Because the module is in the chassis, it may even be pressed between the module and the carrier board. Without antennas, the signal strength will be greatly affected.
+
+- **Step 1**. Detach the carrier board from the reComputer chassis
+
+Before installing the wireless module, detach the carrier board from the reComputer chassis as shown below:
+
+
+
+- **Step 2**. Remove the case silicone plug
+
+There are 4 reserved antenna openings in the chassis, where are plugged with silicone plugs, as shown in the figure below.
+
+
+
+Select the two outer holes, squeeze the silicone plug from the outside of the chassis to the inside of the chassis, and then pull out the silicone plug from the inside to expose the antenna hole.
+
+
+
+- **Step 3**. Install the SAM header
+
+As shown in the figure below, install the nut and nut of the SAM head to the wifi hole, paying attention to place the cable end in the chassis.
+
+
+
+- **Step 4**. Insert the wireless module into the M.2 Key E port
+
+!!!Note
+ The M.2 Key E interface is on the bottom or top of the carrier board. For different carriers, please refer to Carrier Board Hardware Layout. Before installation, you may want to remove the core board from the carrier board.
+
+As shown in the figure below, find the M.2 Key E interface on the carrier board, and insert the wireless module into the interface slot.
+
+
+
+After the wireless module is firmly inserted, fix it with screws.
+
+
+
+- **Step 5**. Insert 2 IPEX plugs into the corresponding sockets of the wireless module, the connection is a button connection, as shown in the figure below. Simply press it and no more operations are required.
+
+
+
+The installation should be like the figure shown below. At this time, be careful not to break the wire between the wireless module and the SAM antenna base.
+
+
+
+- **Step 6**. Install the module to the chassis
+
+Place carefully the carrier board into the reComputer chassis and then install the screws.
+
+
+
+- **Step 7**. Equip antennas
+
+Install two SAM male antennas to the SAM female sockets and tighten. That will be all the hardware installation.
+
+
+
+- **Step 8**. Power on the reComputer and connect to the wireless network
+
+Connect the peripherals to the reComputer and then power on. Enter the system and open the network option in the upper right corner of the screen. After checking the **Enable Wi-Fi** option, you will see the nearby wireless network. Select the available wireless network connection.
+
+
+
+Congratulations, you have successfully installed the wireless module and connected to the network.
+
+## Hardware Layout
+
+### **J101 carrier board**
+
+**Top View**
+
+
+
+### **J202 carrier board**
+
+**Top View**
+
+
+
+**Bottom View**
+
+
+
+### **Jetson A206 carrier board(equipped with Jetson Nano)**
+
+*Click [here](https://files.seeedstudio.com/wiki/recomputer-Jetson-20-1-H1/A206-carrier-board.pdf) to check out the pins of Jetson A206 carrier board(equipped with Jetson Nano) to the operating interfaces.*
+
+**Top View**
+
+
+
+**Bottom View**
+
+
+
+### **Jetson A206 carrier board (equipped with Jetson Xavier NX)**
+
+*Click [here](https://files.seeedstudio.com/wiki/recomputer-Jetson-20-1-H1/A206-carrier-board.pdf) to check out the pins of Jetson A206 carrier board(equipped with Jetson Nano) to the operating interfaces.*
+
+**Top View**
+
+
+
+**Bottom View**
+
+
+
+## Detailed Comparison
+
+| Product | reComputer J1010 | reComputer J1020 | reComputer J2011 | reComputer J2012 |
+|:--------------------:|:------------------------------------------------------------------------------------------------------------------------------:|:------------------------------------------------------------------------:|:------------------------------------------------------------------------------------------------------------------------------:|:------------------------------------------------------------------------------------------------------------------------------:|
+| Module | Nano | Nano | Xavier NX | Xavier NX 16GB |
+| AI Perf | 472 GFLOPS | 472 GFLOPS | 21 TOPS | 21 TOPS |
+| GPU | 128-core NVIDIA Maxwell™ | 128-core NVIDIA Maxwell™ | 384-core NVIDIA Volta™ GPU | 384-core NVIDIA Volta™ GPU |
+| CPU | Quad-core ARM A57 @ 1.43 GHz | Quad-core ARM A57 @ 1.43 GHz | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6 MB L2 + 4 MB L3 | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6 MB L2 + 4 MB L3 |
+| Memory | 4GB 64-bit LPDDR4 25.6GB/s | 4GB 64-bit LPDDR4 25.6GB/s | 8 GB 128-bit LPDDR4x 59.7GB/s | 8 GB 128-bit LPDDR4x 59.7GB/s |
+| Storage | 16 GB eMMC | 16 GB eMMC | 16 GB eMMC | 16 GB eMMC |
+| VIDEO ENCODER | 4K30 \| 2x1080p60 \| 4x1080p30 \| 4x720p60 \| 9x720p30 (H.265 & H.264) | 4K30 \| 2x1080p60 \| 4x1080p30 \| 4x720p60 \| 9x720p30 (H.265 & H.264) | 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.265) 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 20x 108p30 (H.264) | 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.265) 2x 4K60 \| 4x 4K30 \| 10x 1080p60 \| 20x 108p30 (H.264) |
+| VIDEO DECODER | 4K60 \| 2x 4K30 \| 4x 1080p60 \| 8x 1080p30 \| 9x 720p60 (H.265 & H.264) | 4K60 \| 2x 4K30 \| 4x 1080p60 \| 8x 1080p30 \| 9x 720p60 (H.265 & H.264) | 2x 8K30 \| 6x 4K60 \| 12x 4K30 \| 22x 1080p60 \| 44x 1080p30 (H.265) 2x 4K60 \| 6x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.264) | 2x 8K30 \| 6x 4K60 \| 12x 4K30 \| 22x 1080p60 \| 44x 1080p30 (H.265) 2x 4K60 \| 6x 4K30 \| 10x 1080p60 \| 22x 1080p30 (H.264) |
+| Gigabit Ethernet | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) |
+| USB | 1 x USB 3.0 Type A Connector; 2 x USB 2.0 Type A Connector; 1 x USB Type C for Device mode; 1 x USB Type C for 5V power input | 4 x USB 3.0 Type A Connector; 1 x Micro-USB port for Device mode; | 4 x USB 3.0 Type A Connector; 1 x Micro-USB port for Device mode; | 4 x USB 3.0 Type A Connector; 1 x Micro-USB port for Device mode; |
+| CSI Camera Connect | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) |
+| Display | 1x HDMI Type A | 1xHDMI Type A; 1xDP | 1xHDMI Type A; 1xDP | 1xHDMI Type A; 1xDP |
+| FAN | 1x FAN(5V PWM) | 1x FAN(5V PWM) | 1x FAN(5V PWM) | 1x FAN(5V PWM) |
+| M.2 KEY E | 1x M.2 Key E | 1x M.2 Key E(Disabled) | 1x M.2 Key E | 1x M.2 Key E |
+| M.2 KEY M | - | 1x M.2 Key M | 1x M.2 Key M | 1x M.2 Key M |
+| RTC | 1x RTC Socket | 1x RTC socket | 1x RTC Socket | 1x RTC Socket |
+| Multifunctional port | 1x 40-Pin header | 1x 40-Pin header | 1x 40-Pin header | 1x 40-Pin header |
+| Power | USB-Type C 5V⎓3A; | DC Jack 12V/2A | DC Jack 19V/4.74A (MAX 90W) MAX | DC Jack 19V/4.74A (MAX 90W) MAX |
+| Mechanical | 130 mm x 120 mm x 50 mm | 130mm x120mm x 50mm | 130mm x120mm x 50mm | 130mm x120mm x 50mm |
+| | | | | |
+
+## Carrier Board Technical Specification
+
+| Connector | J1010 Carrier Board | Jetson A206 Carrier Board |
+|--------------------------|--------------------------------------------------|--------------------------------------------------|
+| Jetson module connector | 1x Jetson SODIMM connector, 260-pin | 1x Jetson SODIMM connector, 260-pin |
+| USB Type A | 1x USB 3.0 Type-A Connector 2x USB 2.0 Type A connectors | 4x USB 3.0 Type-A Connectors |
+| USB Micro Type B | - | 1x USB Micro B, RA Female |
+| USB Type C | 2x Type C connector | - |
+| Ethernet Port | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) | 1x RJ45 Gigabit Ethernet Connector (10/100/1000) |
+| Display Port | 1xHDMI type A | 1xHDMI type A and 1xDP |
+| CSI Camera Connector | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | 2x CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) |
+| M.2 Key E | 1x M.2 Key E Slot (75-pin) 2230 | 1x M.2 Key E Slot (75-pin) 2230 |
+| M.2 Key M | - | 1x M.2 Key M Slot (75-pin) NVME 2280 |
+| Multifunctional Port | 2.0 Pitch 40 PIN | 2.0 Pitch 40 PIN |
+| Button Header | 1x Button Header (1x12, 2.54mm pitch, RA) | 1x Button Header (1x12, 2.54mm pitch, RA) |
+| FAN Connector | 1x Picoblade Header | 1x Picoblade Header |
+| CAN | Diasabled | 1x CAN Bus Header (1x4, 2.54mm pitch, RA) |
+| RTC | 1x RTC Back-up Coin Cell Socket (CR1220) | 1x RTC Back-up Coin Cell Socket (CR1225) |
+| Power | 1x Type C connector | 1x DC Input Power TE Connector |
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Initiation.md b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Initiation.md
index e8759083f457d..d0342521f3d09 100644
--- a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Initiation.md
+++ b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_Jetson_Series_Initiation.md
@@ -1,301 +1,299 @@
----
-description: reComputer for Jetson Initiation
-title: reComputer for Jetson Initiation
-keywords:
- - Edge
- - reComputer
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Series_Initiation
-last_update:
- date: 01/04/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# reComputer for Jetson Initiation
-
-All reComputer for Jetson are loaded 16 GB eMMC where `ubuntu 18.04 LTS` and `NVIDIA JetPack 4.6` are both already installed. Follow the instructions, connect peripherals, you can power it up and directly use it in few seconds.
-
-
-
-## 1. Connect Peripherals
-
-Connect the reComputer host to a USB-connected keyboard, mouse, and connect to the screen display via HDMI port or DP port (A206 carrier board only).
-
-
-
-:::note
-For the reComputer host with both HDMI or DP interface, although it has two display output ports, it does not support dual display output, which means only one display output interface can be used at the same time.
-:::
-
-## 2. Power Up
-
-After connecting peripherals, connect power to the reComputer host.
-
-- The power supply of the [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) is powered by the Type-C interface, and the position of the power supply near the HDMI interface is shown in the figure below.
-
-
-
-:::note
-[reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) has a Type-C port on the both sides, where the one on the right near the LAN port is the data transmission port. It is strictly forbidden to insert the Type-C power supply into the data transmission port on the right, which may cause damage to the components.
-:::
-
-- [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html), [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html), and [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) are powered by DC interface where is near the HDMI interface.
-
-
-
-After connecting to the power supply, the reComputer host will automatically power on.
-
-## 3. Initial Setup
-
-The new reComputer has already flashed the system. But before we can use it, it still requires some necessary initial settings.
-
-### Step 1: Wait for powering on
-
-After powering on, the first thing you see will be the huge NVIDIA icon displayed in the middle of the screen. Before entering the configuration page, you may find reComputer automatically restarting twice, this process will take about a minute.
-
-
-
-### Step 2: Review and accept the license
-
-In the configuration page, first you will be asked to check the license and select "**I accept the terms of these licenses**" to agree it and then proceed to the next step.
-
-
-
-### Step 3:Choose system language and keyboard layout
-
-After clicking the "Continue" button, the next page will ask you to select the system language and keyboard layout. You can select them according to your actual needs.
-
-
-
-
-
-### Step 4: Connect to the network
-
-There are two ways to connect the reComputer to the Internet. One is to connect directly with a network cable, and the other one is to connect to the Internet through Wi-Fi (wireless module required). If you do not need Internet access for software updates, you can choose not to connect to the Internet for the next step when you are in this step.
-
-
-
-### Step 5: Configure user information and password
-
-On the next page, you will be asked to enter your username and password. You will need to remember your startup password as you will need to start reComputer later.
-
-If you find it tedious to enter your password every time you start reComputer, and to ensure that no one else can use it, you can select the "Require my password to log in" option below as we do not recommand it.
-
-
-
-### Step 6: Select the supply voltage
-
-The final you will chose is the supply voltage while the reComputer operating.
-
-- [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) and [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html) are both equipped with Jetson Nano module. We highly recommand the **MAXN** model, for which ensure your reComputer operate normally.
-
-
-
-- [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html) and [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) are both equipped with Jetson Xavier NX module, at which will provide a variety of power supply output power options. The default model is 10 W as `MODE_10W_DESKTOP - (Default)` that you can see here:
-
-
-
-:::note
-The following table shows NVIDIA predefined power modes and associated module resource usage caps.
-
-:::
-
-After completing the above instructions, we need to wait 1~2 minutes for the reComputer to do the final configuration.
-
-
-
-## 4. Get Started
-
-After reComputer completes the initial setup, it will automatically restart. And After that, it will enter the system desktop as shown in the figure below. It shows the system is in place and can be used.
-
-
-
-Because the product incldes a built-in 16 GB eMMC where has been installed `ubuntu 18.04 LTS` and `NVIDIA JetPack 4.6`, the remaining user free space is about 2GB. The following figure shows the result after using the disk space command in the terminal:
-
-```shell
-seeed@seeed-desktop:~$ df -hl
-Filesystem Size Used Avail Use% Mounted on
-/dev/mmcblk0p1 14G 12G 2.0G 86% /
-none 3.5G 0 3.5G 0% /dev
-tmpfs 3.8G 75M 3.8G 2% /dev/shm
-tmpfs 3.8G 22M 3.8G 1% /run
-tmpfs 5.0M 4.0K 5.0M 1% /run/lock
-tmpfs 3.8G 0 3.8G 0% /sys/fs/cgroup
-tmpfs 777M 128K 777M 1% /run/user/1000
-seeed@seeed-desktop:~$
-```
-
-## Install NVIDIA system on reComputer
-
-If your reComputer devicess crash and you want to reinstall the NVIDIA system. We here provide you the wiki about how to install NVIDIA System on reComputer. The provided wikis include A20X carrier boards and reComputer J1010 Carrier Board:
-
-- [Install NVIDIA system based on A20X carrier board](https://wiki.seeedstudio.com/reComputer_J2021_J202_Flash_Jetpack/)
-- [Install NVIDIA system based on reComputer J1010 Carrier Board](https://wiki.seeedstudio.com/reComputer_J1010_J101_Flash_Jetpack/)
-
-## Troubleshooting
-
-### Q1: The remaining space in the eMMC in the received reComputer is only about 2GB, how can I solve the problem of insufficient space?
-
-We currently offer three ways to deal with this particular situation, and you can choose the right solution for you based on the actual situation.
-
-**Option 1.** Redeployment of systems to external storage devices
-
-If you haven't started a project with reComputer, you might consider using this option to redeploy the new system on a storage device with sufficient capacity.
-
-- There are generally two ways to install a system for reComputer, the first is to use the **NVIDIA SDK Manager**.
-
-If you are on a **reComputer J2011** or **reComputer J2012**, in **step 12** of [Flashing to eMMC with SDK Manager](/reComputer_J2021_J202_Flash_Jetpack#flashing-to-emmc-with-command-line), you can expand the capacity by changing the location of the system burn-in.
-
-
-
-:::tip
-This method is not applicable to the Jetson Nano module.
-:::
-
-- There are generally two ways to install a system for reComputer, the second is to use the **command lines**.
-
-- If you are using an **A20X carrier board**, the method to install the system using the command line is in [Flashing to eMMC with command-line](/reComputer_J2021_J202_Flash_Jetpack#flashing-to-emmc-with-command-line).
-
-- If you are using the **reComputer J1010 Carrier Board**, then use the command line to install the system at [Flashing to eMMC with command-line](/reComputer_J1010_J101_Flash_Jetpack#flashing-jetpack-os-via-command-line).
-
-They both essentially complete the installation of the system by using the following command.
-
-```sh
-sudo ./flash.sh [options]
-```
-
-Where:
-
-1. `[options]` is one or more command line options. All of the options are optional. See [Flashing Script Usage](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/SD/FlashingSupport.html#flashing-script-usage) for information about the options.
-
-2. `` specifies the configuration to be applied to the device to be flashed. Values are listed in the table in [Jetson Modules and Configurations](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/IN/QuickStart.html#in-quickstart-jetsonmodulesandconfigurations-configurations) in the topic [Quick Start](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/IN/QuickStart.html#in-quickstart). `flash.sh` gets the configuration from a configuration file named `.conf`.
-
-3. `` specifies the type of device to be flashed. Use the value **mmcblk0p1** to flash a local storage device (eMMC or SD card, depending on platform), as distinguished from an NFS server, for example.
-
-As you can see from the above explanation, if we want to install the system in external storage, we can do so by changing the `` option.
-
-For a partition on a USB storage device connected to the reComputer device, enter this command:
-
-```sh
-sudo ./flash.sh sda
-```
-
-For a partition on an NVMe storage device connected to the reComputer device, enter this command:
-
-```sh
-sudo ./flash.sh nvme0n1p
-```
-
-`` is a number specifying the APP partition’s position on the storage device, e.g. `sda1` for a USB device, or `nvme0n1p1` for an NVMe storage device.
-
-**Option 2.** Remove unneeded JetPack components to increase eMMC space.
-
-NVIDIA JetPack SDK is the most comprehensive solution for building end-to-end accelerated AI applications. All Jetson modules and developer kits are supported by JetPack SDK.
-
-JetPack SDK includes the Jetson Linux Driver Package (L4T) with Linux operating system and CUDA-X accelerated libraries and APIs for Deep Learning, Computer Vision, Accelerated Computing and Multimedia. It also includes samples, documentation, and developer tools for both host computer and developer kit, and supports higher level SDKs such as DeepStream for streaming video analytics and Isaac for robotics.
-
-[This table](https://docs.nvidia.com/jetson/jetpack/install-jetpack/index.html#jetpack-ota-packages) lists all components included in JetPack 4.6.
-
-
-
-The JetPack SDK contains a lot of content, but it's not something that all developers will need to use. So, it is one of the good options to selectively remove them for more storage space.
-
-We can view information about the JetPack installed in reComputer Jetson with the following command.
-
-```sh
-sudo apt-cache show nvidia-jetpack
-```
-
-
-
-With this command, you can quickly learn the content of the installed components in JetPack, such as CUDA, openCV, etc.
-
-To get more detailed information, you can use the following command to find out all the software currently installed by reComputer and its description information.
-
-```sh
-dpkg-query -l
-```
-
-Then, you can selectively remove the content you don't need according to your actual needs and the description information for the component. The command to delete is as follows.
-
-```sh
-sudo apt autoremove ${packagesname}
-```
-
-The environment variable `${packagesname}` indicates the name of the component package you want to remove. If you want to remove all packages prefixed by a certain name, you can add `*` to this prefix to indicate that.
-
-As an example, if we want to remove all components about **CUDA**, then we can use the following command.
-
-```sh
-sudo apt autoremove cuda*
-```
-
-After releasing the contents of the CUDA component, you can see that the remaining capacity of the eMMC will also become larger.
-
-
-
-The same applies to other JetPack components.
-
-**Option 3.** Capacity expansion via external storage devices.
-
-You can choose this option if you have been using reComputer normally for some time and do not want to destroy the existing system environment to complete the expansion solution.
-
-We already have a well-developed expansion wiki [Memory Expansion for reComputer series](https://wiki.seeedstudio.com/reComputer_Jetson_Memory_Expansion/).
-
-It is worth noting that any expansion operation is dangerous and we expect you to be proactive in **making backups** of your system before everything starts.
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: reComputer for Jetson Initiation
+title: reComputer for Jetson Initiation
+keywords:
+ - Edge
+ - reComputer
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Series_Initiation
+last_update:
+ date: 01/04/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# reComputer for Jetson Initiation
+
+All reComputer for Jetson are loaded 16 GB eMMC where `ubuntu 18.04 LTS` and `NVIDIA JetPack 4.6` are both already installed. Follow the instructions, connect peripherals, you can power it up and directly use it in few seconds.
+
+
+
+## 1. Connect Peripherals
+
+Connect the reComputer host to a USB-connected keyboard, mouse, and connect to the screen display via HDMI port or DP port (A206 carrier board only).
+
+
+
+:::note
+For the reComputer host with both HDMI or DP interface, although it has two display output ports, it does not support dual display output, which means only one display output interface can be used at the same time.
+:::
+
+## 2. Power Up
+
+After connecting peripherals, connect power to the reComputer host.
+
+- The power supply of the [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) is powered by the Type-C interface, and the position of the power supply near the HDMI interface is shown in the figure below.
+
+
+
+:::note
+[reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) has a Type-C port on the both sides, where the one on the right near the LAN port is the data transmission port. It is strictly forbidden to insert the Type-C power supply into the data transmission port on the right, which may cause damage to the components.
+:::
+
+- [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html), [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html), and [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) are powered by DC interface where is near the HDMI interface.
+
+
+
+After connecting to the power supply, the reComputer host will automatically power on.
+
+## 3. Initial Setup
+
+The new reComputer has already flashed the system. But before we can use it, it still requires some necessary initial settings.
+
+### Step 1: Wait for powering on
+
+After powering on, the first thing you see will be the huge NVIDIA icon displayed in the middle of the screen. Before entering the configuration page, you may find reComputer automatically restarting twice, this process will take about a minute.
+
+
+
+### Step 2: Review and accept the license
+
+In the configuration page, first you will be asked to check the license and select "**I accept the terms of these licenses**" to agree it and then proceed to the next step.
+
+
+
+### Step 3:Choose system language and keyboard layout
+
+After clicking the "Continue" button, the next page will ask you to select the system language and keyboard layout. You can select them according to your actual needs.
+
+
+
+
+
+### Step 4: Connect to the network
+
+There are two ways to connect the reComputer to the Internet. One is to connect directly with a network cable, and the other one is to connect to the Internet through Wi-Fi (wireless module required). If you do not need Internet access for software updates, you can choose not to connect to the Internet for the next step when you are in this step.
+
+
+
+### Step 5: Configure user information and password
+
+On the next page, you will be asked to enter your username and password. You will need to remember your startup password as you will need to start reComputer later.
+
+If you find it tedious to enter your password every time you start reComputer, and to ensure that no one else can use it, you can select the "Require my password to log in" option below as we do not recommand it.
+
+
+
+### Step 6: Select the supply voltage
+
+The final you will chose is the supply voltage while the reComputer operating.
+
+- [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) and [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html) are both equipped with Jetson Nano module. We highly recommand the **MAXN** model, for which ensure your reComputer operate normally.
+
+
+
+- [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html) and [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) are both equipped with Jetson Xavier NX module, at which will provide a variety of power supply output power options. The default model is 10 W as `MODE_10W_DESKTOP - (Default)` that you can see here:
+
+
+
+:::note
+The following table shows NVIDIA predefined power modes and associated module resource usage caps.
+
+:::
+
+After completing the above instructions, we need to wait 1~2 minutes for the reComputer to do the final configuration.
+
+
+
+## 4. Get Started
+
+After reComputer completes the initial setup, it will automatically restart. And After that, it will enter the system desktop as shown in the figure below. It shows the system is in place and can be used.
+
+
+
+Because the product incldes a built-in 16 GB eMMC where has been installed `ubuntu 18.04 LTS` and `NVIDIA JetPack 4.6`, the remaining user free space is about 2GB. The following figure shows the result after using the disk space command in the terminal:
+
+```shell
+seeed@seeed-desktop:~$ df -hl
+Filesystem Size Used Avail Use% Mounted on
+/dev/mmcblk0p1 14G 12G 2.0G 86% /
+none 3.5G 0 3.5G 0% /dev
+tmpfs 3.8G 75M 3.8G 2% /dev/shm
+tmpfs 3.8G 22M 3.8G 1% /run
+tmpfs 5.0M 4.0K 5.0M 1% /run/lock
+tmpfs 3.8G 0 3.8G 0% /sys/fs/cgroup
+tmpfs 777M 128K 777M 1% /run/user/1000
+seeed@seeed-desktop:~$
+```
+
+## Install NVIDIA system on reComputer
+
+If your reComputer devicess crash and you want to reinstall the NVIDIA system. We here provide you the wiki about how to install NVIDIA System on reComputer. The provided wikis include A20X carrier boards and reComputer J1010 Carrier Board:
+
+- [Install NVIDIA system based on A20X carrier board](https://wiki.seeedstudio.com/reComputer_J2021_J202_Flash_Jetpack/)
+- [Install NVIDIA system based on reComputer J1010 Carrier Board](https://wiki.seeedstudio.com/reComputer_J1010_J101_Flash_Jetpack/)
+
+## Troubleshooting
+
+### Q1: The remaining space in the eMMC in the received reComputer is only about 2GB, how can I solve the problem of insufficient space?
+
+We currently offer three ways to deal with this particular situation, and you can choose the right solution for you based on the actual situation.
+
+**Option 1.** Redeployment of systems to external storage devices
+
+If you haven't started a project with reComputer, you might consider using this option to redeploy the new system on a storage device with sufficient capacity.
+
+- There are generally two ways to install a system for reComputer, the first is to use the **NVIDIA SDK Manager**.
+
+If you are on a **reComputer J2011** or **reComputer J2012**, in **step 12** of [Flashing to eMMC with SDK Manager](/reComputer_J2021_J202_Flash_Jetpack#flashing-to-emmc-with-command-line), you can expand the capacity by changing the location of the system burn-in.
+
+
+
+:::tip
+This method is not applicable to the Jetson Nano module.
+:::
+
+- There are generally two ways to install a system for reComputer, the second is to use the **command lines**.
+
+- If you are using an **A20X carrier board**, the method to install the system using the command line is in [Flashing to eMMC with command-line](/reComputer_J2021_J202_Flash_Jetpack#flashing-to-emmc-with-command-line).
+
+- If you are using the **reComputer J1010 Carrier Board**, then use the command line to install the system at [Flashing to eMMC with command-line](/reComputer_J1010_J101_Flash_Jetpack#flashing-jetpack-os-via-command-line).
+
+They both essentially complete the installation of the system by using the following command.
+
+```sh
+sudo ./flash.sh [options]
+```
+
+Where:
+
+1. `[options]` is one or more command line options. All of the options are optional. See [Flashing Script Usage](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/SD/FlashingSupport.html#flashing-script-usage) for information about the options.
+
+2. `` specifies the configuration to be applied to the device to be flashed. Values are listed in the table in [Jetson Modules and Configurations](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/IN/QuickStart.html#in-quickstart-jetsonmodulesandconfigurations-configurations) in the topic [Quick Start](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/IN/QuickStart.html#in-quickstart). `flash.sh` gets the configuration from a configuration file named `.conf`.
+
+3. `` specifies the type of device to be flashed. Use the value **mmcblk0p1** to flash a local storage device (eMMC or SD card, depending on platform), as distinguished from an NFS server, for example.
+
+As you can see from the above explanation, if we want to install the system in external storage, we can do so by changing the `` option.
+
+For a partition on a USB storage device connected to the reComputer device, enter this command:
+
+```sh
+sudo ./flash.sh sda
+```
+
+For a partition on an NVMe storage device connected to the reComputer device, enter this command:
+
+```sh
+sudo ./flash.sh nvme0n1p
+```
+
+`` is a number specifying the APP partition’s position on the storage device, e.g. `sda1` for a USB device, or `nvme0n1p1` for an NVMe storage device.
+
+**Option 2.** Remove unneeded JetPack components to increase eMMC space.
+
+NVIDIA JetPack SDK is the most comprehensive solution for building end-to-end accelerated AI applications. All Jetson modules and developer kits are supported by JetPack SDK.
+
+JetPack SDK includes the Jetson Linux Driver Package (L4T) with Linux operating system and CUDA-X accelerated libraries and APIs for Deep Learning, Computer Vision, Accelerated Computing and Multimedia. It also includes samples, documentation, and developer tools for both host computer and developer kit, and supports higher level SDKs such as DeepStream for streaming video analytics and Isaac for robotics.
+
+[This table](https://docs.nvidia.com/jetson/jetpack/install-jetpack/index.html#jetpack-ota-packages) lists all components included in JetPack 4.6.
+
+
+
+The JetPack SDK contains a lot of content, but it's not something that all developers will need to use. So, it is one of the good options to selectively remove them for more storage space.
+
+We can view information about the JetPack installed in reComputer Jetson with the following command.
+
+```sh
+sudo apt-cache show nvidia-jetpack
+```
+
+
+
+With this command, you can quickly learn the content of the installed components in JetPack, such as CUDA, openCV, etc.
+
+To get more detailed information, you can use the following command to find out all the software currently installed by reComputer and its description information.
+
+```sh
+dpkg-query -l
+```
+
+Then, you can selectively remove the content you don't need according to your actual needs and the description information for the component. The command to delete is as follows.
+
+```sh
+sudo apt autoremove ${packagesname}
+```
+
+The environment variable `${packagesname}` indicates the name of the component package you want to remove. If you want to remove all packages prefixed by a certain name, you can add `*` to this prefix to indicate that.
+
+As an example, if we want to remove all components about **CUDA**, then we can use the following command.
+
+```sh
+sudo apt autoremove cuda*
+```
+
+After releasing the contents of the CUDA component, you can see that the remaining capacity of the eMMC will also become larger.
+
+
+
+The same applies to other JetPack components.
+
+**Option 3.** Capacity expansion via external storage devices.
+
+You can choose this option if you have been using reComputer normally for some time and do not want to destroy the existing system environment to complete the expansion solution.
+
+We already have a well-developed expansion wiki [Memory Expansion for reComputer series](https://wiki.seeedstudio.com/reComputer_Jetson_Memory_Expansion/).
+
+It is worth noting that any expansion operation is dangerous and we expect you to be proactive in **making backups** of your system before everything starts.
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1020v2/reComputer_J1020_A206_Flash_JetPack.md b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1020v2/reComputer_J1020_A206_Flash_JetPack.md
index a67cff3f62eac..f56052286f6c8 100644
--- a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1020v2/reComputer_J1020_A206_Flash_JetPack.md
+++ b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1020v2/reComputer_J1020_A206_Flash_JetPack.md
@@ -1,345 +1,343 @@
----
-description: reComputer J1020 v1 | A206
-title: reComputer J1020v1 | A206
-keywords:
- - Edge
- - reComputer JetPack™_OS_Installation
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_J1020_A206_Flash_JetPack
-last_update:
- date: 01/05/2023
- author: w0x7ce
-
-no_comments: false # for Disqus
-
----
-
-# Flash JetPack to reComputer J1020v1 (A206 carrier board)
-
-In this wiki, we will show you how to flash Jetpack OS to reComputer J1020. Since the carrier board of it is designed like the offical NVIDIA Nano Developer Carrier Board, we can flash the JetPack in two ways.
-
-## Getting Started
-
-We can use **NVIDIA SDK Manager** Linux Software or we can directly use the **NVIDIA Linux Driver Package** via Linux command line to flash JetPack OS into the reComputer J1020. For the beginners to NVIDIA Jetson, we highly recommand NVIDIA SDK Manager.
-
-- [Option 1 - Flashing JetPack OS via NVIDIA SDK Manage](#flashing-jetpack-os-via-nvidia-sdk-manager)
-- [Option 2 - Flashing JetPack OS via Command Line](#flashing-jetpack-os-via-command-line)
-
-There are still some preparation that we need first:
-
-### Software Preparation
-
-- NVIDIA account
-- Linux Host Computer with Ubuntu 18.04 OS (or above)
-
-!!!note
- In this tutorial, we will use Ubuntu 18.04 LTS based system to complete the installation.
-
-### Hardware Preparation (Force Recovery Mode)
-
-Before we can move on to the installation steps, we need to make sure that our reComputer is in the force recovery mode.
-
-**Step 1.** Before you start, you need to disconnect power of the reComputer.
-**Step 2.** To enter recovery mode, you need to connect **FC REC** and **GND** using jumpers.
-
-
-
-
-
Button Header
-
Description
-
Button Header
-
Description
-
-
-
-
1
-
PWR BTN
-
7
-
AUTO ON
-
-
-
2
-
GND
-
8
-
DISABLE
-
-
-
3
-
FC REC
-
9
-
UART TXD
-
-
-
4
-
GND
-
10
-
UART RXD
-
-
-
5
-
SYS RET
-
11
-
LED +
-
-
-
6
-
GND
-
12
-
LED -
-
-
-
-**Step 3.** Power up the reComputer with 12V/5A DC cable on the left of the reComputer and use a Type-C cable to connect the Linux Host PC on the right of the reComputer.
-
-
-
-!!!Attention
- Before wiring, please pay attention to the power connector and data connector, please do not connect the data connector directly to DC power.
-
-**Step 4.** Under the command line window of the host computer, enter the command `lsusb`. When the returned content has the `ID 0955:7f21 NVidia Corp.` in it, it means that the reComputer is in the force recovery mode and we can proceed to the subsequent operations.
-
-
-
-## Flashing JetPack OS via NVIDIA SDK Manager
-
-Next we will go through the tutorial about installing the system via NVIDIA SDK Manager. The an NVIDIA SDK Manager all-in-one tool that bundles developer software and provides an end-to-end development environment setup solution for NVIDIA SDKs. Thus, it is recommanded for the beginners.
-
-
-
-### Step 1. Install NVIDIA SDK Manager on the Linux Host PC
-
-We need to open the browser on the Linux Host PC and download the NVIDIA SDK Manager from the NVIDIA official website.
-
-
-
-### Step 2. Open NVIDIA SDK Manager and login
-
-On the Linux host PC screen, we can right click the mouse and open a Terminal. Then we can type the command below to start the SDK Manager:
-
-`sdkmanager`
-
-
-
-The first time you use NVIDIA SDK Manager, a web page will pop up prompting you to log in with your previously registered NVIDIA account.
-
-### Step 3. Select the target device
-
-After logging in, you will be taken to the first screen where the first step of installing. Since we have already connected the reComputer J1020, there will be a window pop up to let you select the hardware device.
-
-The reComputer J1020 has equipped with **NVIDIA Jetson Nano 4GB module**, so we can choose the first one.
-
-
-
-There are more selections for you to choose in the first screen:
-
-- The **Jetson** in the Product Category panel need to be selected.
-- In the Hardware Configuration panel, we recommend that you **do not select Host Machine**. This will take more time to install the NVIDIA components for your current Ubuntu host. You can choose it if you need.
-- In the Target Operating System panel, we can select different **operating system** and **JetPack version**. But be careful the version of JetPack, different modules may support different type of JetPack. We recommand "JetPack 4.6.1" here.
-- In the Additional SDKs, since the storage space of eMMC is only 16GB, it will be out of memory if we install DeepStream here.
-
-
-
-Click Continue to proceed to the next step.
-
-### Step 4. Review wanted components
-
-From **Details and License**, you can expand the host components and target components panels to review the components that will be installed on your system.
-
-
-
-If you only need to install the system, you can uncheck the SDK component.
-
-
-
-!!!Tip
- When choosing which components to install, you may want to keep an eye on the capacity used. The built-in eMMC size is only 16GB, please allocate and use this space wisely according to your actual needs.
-
- After actual testing, there is only about 500MB of eMMC space left after installing the full set of SDK components.
-
-
- If you want to check how to solve the problem of insufficient capacity, please refer to [Troubleshooting](https://wiki.seeedstudio.com/reComputer_Jetson_Series_Initiation/#q1-the-remaining-space-in-the-emmc-in-the-received-recomputer-jetson-is-only-about-2gb-how-can-i-solve-the-problem-of-insufficient-space).
-
-If you want SDK Manager to download all the files to a location other than the default path, go to the Download & Install Options located at the bottom of the screen, then select the path you wish to use.
-
-
-
-Select Continue to proceed to the next step.
-
-### Step 5. Install the system
-
-Before the installation begins, SDK Manager prompts you to enter your `sudo` password.
-
-
-
-After a while, we will be asked to set up the new system for our reComputer. Since we manually force into recovery mode, we select `Manual setup: set the target to Force Recovery Mode via manual operations` here. Meanwhile, we choose the default **Pre-Config**.
-
-
-
-After that, we need to enter the name and password of our new Jetson system to our reComputer, it is set by yourself.
-
-When ready, click `Flash` to continue.
-
-The display shows the progress of the download and installation of the software. Please wait patiently for the installation to complete.
-
-
-
-### (Optional)Step 6. Install the SDK components
-
-If you checked the installation of the component in the previous **step 4**, you will need to go through this step.
-
-After a moment, you will be able to see a new window pop up in the NVIDIA SDK Manager, prompting you that you need to connect to your device via IP address. It means the system has been alreadly installed and the components installing will be proceeded.
-
-
-
-In this case, we can **pull out the jumper** and restart the reComputer. Then we need to connect the reComputer to a monitor via HDMI, enter the password you entered in **step 4**, and log in to the main interface.
-
-At this point you need to connect the reComputer to the same LAN as the Linux host PC and determine the **IP address** of the Jetson by using the command `ifconfig`.
-
-Go back to the Linux host PC and enter the IP address you just obtained. NVIDIA SDK Manager will try to connect to the Jetson device and proceed to complete the installation of the next SDK components.
-
-
-
-When you see the following window appear, the installation has been done. You can start using Jetson or continue to follow the steps below to complete some basic configuration of your new system.
-
-
-
-!!!Attention
- Be sure to unplug the jumper and exit force recovery mode before re-powering into the system.
-
-## Flashing JetPack OS via Command Line
-
-Thanks to the freedom to customize the BSP(NVIDIA Linux Driver Package), flashing JetPack OS via command line can be very easy for the Linux knowledge base users.
-
-
-
-### Step 1. Download the proper NVIDIA Linux Driver Package
-
-On the **Linux host PC**, we need to open a browser and go the Jetson Linux Archive. First we should check if the version of Jetson Linux is supported our reComputer Jetson module.
-
-
-
-Once you find the proper version, click to go to the downloaded page. Find and click the "L4T Driver Package (BSP)" and "Sample Root Filesystem" to download the driver files. The names of the files are like `Tegra_Linux_Sample-Root-Filesystem_Rxx.x.x_aarch64.tbz2` and `Jetson-210_Linux_Rxx.x.x_aarch64.tbz2`.
-
-
-
-As the example, we choose the NVIDIA L4T 32.7.1 version since it is included as part of JetPack4.6.1 and supports the Jetson Nano module. The names of the files:
-
-- Tegra_Linux_Sample-Root-Filesystem_R32.7.2_aarch64.tbz2
-- Jetson-210_Linux_R32.7.2_aarch64.tbz2
-
-### Step 2. Unzip Package Files and Assemble the Rootfs via Command Line
-
-On the Linux host PC, we should find a folder and store the package files we download before. Then open a command line window(Terminal) at the folder and use the command line below to unzip the files and assemble the rootfs:
-
-```sh
-tar xf ${L4T_RELEASE_PACKAGE}
-cd Linux_for_Tegra/rootfs/
-sudo tar xpf ../../${SAMPLE_FS_PACKAGE}
-cd ..
-sudo ./apply_binaries.sh
-```
-
-!!!Note
- `${}` is where you put the names of the files.
-
-*As the example of **NVIDIA L4T 32.7.1**, the downloaded files are stored in `/Desktop/L4T_Drivers`, so under the '/Desktop/L4T_Drivers' path we open the command line window(Terminal) and execute the following command.
-
-```sh
-tar xf Jetson-210_Linux_R32.7.1_aarch64.tbz2
-cd Linux_for_Tegra/rootfs/
-sudo tar xpf ../../Tegra_Linux_Sample-Root-Filesystem_R32.7.1_aarch64.tbz2
-cd ..
-sudo ./apply_binaries.sh
-```
-
-The output should be like:
-
-
-
-### Step 3. Flash the System to reComputer
-
-Since we alreadly force the reComputer J1020 into the recovery mode and the module is Jetson Nano. We can directly flash the system into the reComputer execute following command:
-
-```sh
-sudo ./flash.sh jetson-nano-devkit-emmc mmcblk0p1
-```
-
-
-
-!!!Tip
- Flashing L4T takes about 10 minutes, or more under a slow host computer.
-
-At this moment, we can unplug the jumper and then power up the reComputer again to use it.
-
-## Troubleshooting
-
-### Troubleshooting Installation with NVIDIA SDK Manager
-
-There are many causes of various installation errors. Below is a checklist of common installation issues, which may help you recover from a broken installation.
-
-1. Review the summary table to identify which component failed.
-
- a. Expand the group with the "Error" status.
-
- b. When you find the failed component, click the details icon to the right of Install Error to be redirected to the Terminal tab, which will display the exact error.
-
-
-
-2. If the error is related to an environment issue, such as a broken apt repository or missing prerequisite, try to fix it manually, then click the Retry Failed Items button.
-
-
-
-3. Retrying the installation is also available in two other ways:
-
- a. From **Flashing to eMMC with SDK Manager -- Step 3**, use the Repair/Uninstall button to get to the Manage NVIDIA SDKs page. If needed, expand the SDK that has the "Broken" status, then click Repair for the relevant part (Host or Target).
-
-
-
-4. At **Flashing to eMMC with SDK Manager -- Step 3**, select the required SDK and run through the installation again.
-
-5. Finally, try to uninstall and reinstall the relevant SDK.
-
-### Troubleshooting installation using the command line
-
-The command line installation method is relatively simple, and is often prone to error in scenarios where force recovery mode is used.
-
-If you encounter the error shown below in **Flashing to eMMC with command-line -- Step 2**, you probably did not succeed in getting the Carrier Board into force recovery mode. Please pay special attention, do not enter force recovery mode with the Carrier Board powered on, as this is not valid.
-
-
-
-If you can't get into the system in **Flashing to eMMC with command-line -- Step 3** and are stuck on the boot up display command line, you probably did not exit force recovery mode. Likewise, it is not valid for you to unplug the jumper to exit force recovery mode while the Carrier Board is powered up, this all needs to be done while you are powered down.
-
-
-
-!!!Note
- If more storage space is needed, we can use SD card to expand the capacity, or burn the system on SD card, you can refer to our recommended solution [Flash System on SD card](https://wiki.seeedstudio.com/J101_Enable_SD_Card/)
-
-## Resources
-
-[reComputer J1020 datasheet](https://files.seeedstudio.com/wiki/reComputer-Jetson/reComputer-Jetson-J1020-w_o-power-adapter-datasheet.pdf)
-
-[reComptuer J102 (Also J202) Carrier Boards Schematic](https://files.seeedstudio.com/wiki/reComputer-Jetson/reComputer%20J202_V1.0_SCH_PDF_240822.pdf)
-
-[reComputer J1010 3D file](https://files.seeedstudio.com/products/NVIDIA-Jetson/J2021-Xavier-NX.stp)
-
-[Seeed Jetson Serials Catalog](https://files.seeedstudio.com/wiki/Seeed_Jetson/Seeed-NVIDIA_Jetson_Catalog_V1.4.pdf)
-
-[Seeed Studio Edge AI Success Stories](https://www.seeedstudio.com/blog/wp-content/uploads/2023/07/Seeed_NVIDIA_Jetson_Success_Cases_and_Examples.pdf)
-
-[Seeed Jetson Serials Comparision](https://www.seeedstudio.com/blog/nvidia-jetson-comparison-nano-tx2-nx-xavier-nx-agx-orin/)
-
-[Seeed Jetson Devices One Page](https://files.seeedstudio.com/wiki/Seeed_Jetson/Seeed-Jetson-one-pager.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: reComputer J1020 v1 | A206
+title: reComputer J1020v1 | A206
+keywords:
+ - Edge
+ - reComputer JetPack™_OS_Installation
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_J1020_A206_Flash_JetPack
+last_update:
+ date: 01/05/2023
+ author: w0x7ce
+no_comments: false # for Disqus
+---
+
+# Flash JetPack to reComputer J1020v1 (A206 carrier board)
+
+In this wiki, we will show you how to flash Jetpack OS to reComputer J1020. Since the carrier board of it is designed like the offical NVIDIA Nano Developer Carrier Board, we can flash the JetPack in two ways.
+
+## Getting Started
+
+We can use **NVIDIA SDK Manager** Linux Software or we can directly use the **NVIDIA Linux Driver Package** via Linux command line to flash JetPack OS into the reComputer J1020. For the beginners to NVIDIA Jetson, we highly recommand NVIDIA SDK Manager.
+
+- [Option 1 - Flashing JetPack OS via NVIDIA SDK Manage](#flashing-jetpack-os-via-nvidia-sdk-manager)
+- [Option 2 - Flashing JetPack OS via Command Line](#flashing-jetpack-os-via-command-line)
+
+There are still some preparation that we need first:
+
+### Software Preparation
+
+- NVIDIA account
+- Linux Host Computer with Ubuntu 18.04 OS (or above)
+
+!!!note
+ In this tutorial, we will use Ubuntu 18.04 LTS based system to complete the installation.
+
+### Hardware Preparation (Force Recovery Mode)
+
+Before we can move on to the installation steps, we need to make sure that our reComputer is in the force recovery mode.
+
+**Step 1.** Before you start, you need to disconnect power of the reComputer.
+**Step 2.** To enter recovery mode, you need to connect **FC REC** and **GND** using jumpers.
+
+
+
+
+
Button Header
+
Description
+
Button Header
+
Description
+
+
+
+
1
+
PWR BTN
+
7
+
AUTO ON
+
+
+
2
+
GND
+
8
+
DISABLE
+
+
+
3
+
FC REC
+
9
+
UART TXD
+
+
+
4
+
GND
+
10
+
UART RXD
+
+
+
5
+
SYS RET
+
11
+
LED +
+
+
+
6
+
GND
+
12
+
LED -
+
+
+
+**Step 3.** Power up the reComputer with 12V/5A DC cable on the left of the reComputer and use a Type-C cable to connect the Linux Host PC on the right of the reComputer.
+
+
+
+!!!Attention
+ Before wiring, please pay attention to the power connector and data connector, please do not connect the data connector directly to DC power.
+
+**Step 4.** Under the command line window of the host computer, enter the command `lsusb`. When the returned content has the `ID 0955:7f21 NVidia Corp.` in it, it means that the reComputer is in the force recovery mode and we can proceed to the subsequent operations.
+
+
+
+## Flashing JetPack OS via NVIDIA SDK Manager
+
+Next we will go through the tutorial about installing the system via NVIDIA SDK Manager. The an NVIDIA SDK Manager all-in-one tool that bundles developer software and provides an end-to-end development environment setup solution for NVIDIA SDKs. Thus, it is recommanded for the beginners.
+
+
+
+### Step 1. Install NVIDIA SDK Manager on the Linux Host PC
+
+We need to open the browser on the Linux Host PC and download the NVIDIA SDK Manager from the NVIDIA official website.
+
+
+
+### Step 2. Open NVIDIA SDK Manager and login
+
+On the Linux host PC screen, we can right click the mouse and open a Terminal. Then we can type the command below to start the SDK Manager:
+
+`sdkmanager`
+
+
+
+The first time you use NVIDIA SDK Manager, a web page will pop up prompting you to log in with your previously registered NVIDIA account.
+
+### Step 3. Select the target device
+
+After logging in, you will be taken to the first screen where the first step of installing. Since we have already connected the reComputer J1020, there will be a window pop up to let you select the hardware device.
+
+The reComputer J1020 has equipped with **NVIDIA Jetson Nano 4GB module**, so we can choose the first one.
+
+
+
+There are more selections for you to choose in the first screen:
+
+- The **Jetson** in the Product Category panel need to be selected.
+- In the Hardware Configuration panel, we recommend that you **do not select Host Machine**. This will take more time to install the NVIDIA components for your current Ubuntu host. You can choose it if you need.
+- In the Target Operating System panel, we can select different **operating system** and **JetPack version**. But be careful the version of JetPack, different modules may support different type of JetPack. We recommand "JetPack 4.6.1" here.
+- In the Additional SDKs, since the storage space of eMMC is only 16GB, it will be out of memory if we install DeepStream here.
+
+
+
+Click Continue to proceed to the next step.
+
+### Step 4. Review wanted components
+
+From **Details and License**, you can expand the host components and target components panels to review the components that will be installed on your system.
+
+
+
+If you only need to install the system, you can uncheck the SDK component.
+
+
+
+!!!Tip
+ When choosing which components to install, you may want to keep an eye on the capacity used. The built-in eMMC size is only 16GB, please allocate and use this space wisely according to your actual needs.
+
+ After actual testing, there is only about 500MB of eMMC space left after installing the full set of SDK components.
+
+
+ If you want to check how to solve the problem of insufficient capacity, please refer to [Troubleshooting](https://wiki.seeedstudio.com/reComputer_Jetson_Series_Initiation/#q1-the-remaining-space-in-the-emmc-in-the-received-recomputer-jetson-is-only-about-2gb-how-can-i-solve-the-problem-of-insufficient-space).
+
+If you want SDK Manager to download all the files to a location other than the default path, go to the Download & Install Options located at the bottom of the screen, then select the path you wish to use.
+
+
+
+Select Continue to proceed to the next step.
+
+### Step 5. Install the system
+
+Before the installation begins, SDK Manager prompts you to enter your `sudo` password.
+
+
+
+After a while, we will be asked to set up the new system for our reComputer. Since we manually force into recovery mode, we select `Manual setup: set the target to Force Recovery Mode via manual operations` here. Meanwhile, we choose the default **Pre-Config**.
+
+
+
+After that, we need to enter the name and password of our new Jetson system to our reComputer, it is set by yourself.
+
+When ready, click `Flash` to continue.
+
+The display shows the progress of the download and installation of the software. Please wait patiently for the installation to complete.
+
+
+
+### (Optional)Step 6. Install the SDK components
+
+If you checked the installation of the component in the previous **step 4**, you will need to go through this step.
+
+After a moment, you will be able to see a new window pop up in the NVIDIA SDK Manager, prompting you that you need to connect to your device via IP address. It means the system has been alreadly installed and the components installing will be proceeded.
+
+
+
+In this case, we can **pull out the jumper** and restart the reComputer. Then we need to connect the reComputer to a monitor via HDMI, enter the password you entered in **step 4**, and log in to the main interface.
+
+At this point you need to connect the reComputer to the same LAN as the Linux host PC and determine the **IP address** of the Jetson by using the command `ifconfig`.
+
+Go back to the Linux host PC and enter the IP address you just obtained. NVIDIA SDK Manager will try to connect to the Jetson device and proceed to complete the installation of the next SDK components.
+
+
+
+When you see the following window appear, the installation has been done. You can start using Jetson or continue to follow the steps below to complete some basic configuration of your new system.
+
+
+
+!!!Attention
+ Be sure to unplug the jumper and exit force recovery mode before re-powering into the system.
+
+## Flashing JetPack OS via Command Line
+
+Thanks to the freedom to customize the BSP(NVIDIA Linux Driver Package), flashing JetPack OS via command line can be very easy for the Linux knowledge base users.
+
+
+
+### Step 1. Download the proper NVIDIA Linux Driver Package
+
+On the **Linux host PC**, we need to open a browser and go the Jetson Linux Archive. First we should check if the version of Jetson Linux is supported our reComputer Jetson module.
+
+
+
+Once you find the proper version, click to go to the downloaded page. Find and click the "L4T Driver Package (BSP)" and "Sample Root Filesystem" to download the driver files. The names of the files are like `Tegra_Linux_Sample-Root-Filesystem_Rxx.x.x_aarch64.tbz2` and `Jetson-210_Linux_Rxx.x.x_aarch64.tbz2`.
+
+
+
+As the example, we choose the NVIDIA L4T 32.7.1 version since it is included as part of JetPack4.6.1 and supports the Jetson Nano module. The names of the files:
+
+- Tegra_Linux_Sample-Root-Filesystem_R32.7.2_aarch64.tbz2
+- Jetson-210_Linux_R32.7.2_aarch64.tbz2
+
+### Step 2. Unzip Package Files and Assemble the Rootfs via Command Line
+
+On the Linux host PC, we should find a folder and store the package files we download before. Then open a command line window(Terminal) at the folder and use the command line below to unzip the files and assemble the rootfs:
+
+```sh
+tar xf ${L4T_RELEASE_PACKAGE}
+cd Linux_for_Tegra/rootfs/
+sudo tar xpf ../../${SAMPLE_FS_PACKAGE}
+cd ..
+sudo ./apply_binaries.sh
+```
+
+!!!Note
+ `${}` is where you put the names of the files.
+
+*As the example of **NVIDIA L4T 32.7.1**, the downloaded files are stored in `/Desktop/L4T_Drivers`, so under the '/Desktop/L4T_Drivers' path we open the command line window(Terminal) and execute the following command.
+
+```sh
+tar xf Jetson-210_Linux_R32.7.1_aarch64.tbz2
+cd Linux_for_Tegra/rootfs/
+sudo tar xpf ../../Tegra_Linux_Sample-Root-Filesystem_R32.7.1_aarch64.tbz2
+cd ..
+sudo ./apply_binaries.sh
+```
+
+The output should be like:
+
+
+
+### Step 3. Flash the System to reComputer
+
+Since we alreadly force the reComputer J1020 into the recovery mode and the module is Jetson Nano. We can directly flash the system into the reComputer execute following command:
+
+```sh
+sudo ./flash.sh jetson-nano-devkit-emmc mmcblk0p1
+```
+
+
+
+!!!Tip
+ Flashing L4T takes about 10 minutes, or more under a slow host computer.
+
+At this moment, we can unplug the jumper and then power up the reComputer again to use it.
+
+## Troubleshooting
+
+### Troubleshooting Installation with NVIDIA SDK Manager
+
+There are many causes of various installation errors. Below is a checklist of common installation issues, which may help you recover from a broken installation.
+
+1. Review the summary table to identify which component failed.
+
+ a. Expand the group with the "Error" status.
+
+ b. When you find the failed component, click the details icon to the right of Install Error to be redirected to the Terminal tab, which will display the exact error.
+
+
+
+2. If the error is related to an environment issue, such as a broken apt repository or missing prerequisite, try to fix it manually, then click the Retry Failed Items button.
+
+
+
+3. Retrying the installation is also available in two other ways:
+
+ a. From **Flashing to eMMC with SDK Manager -- Step 3**, use the Repair/Uninstall button to get to the Manage NVIDIA SDKs page. If needed, expand the SDK that has the "Broken" status, then click Repair for the relevant part (Host or Target).
+
+
+
+4. At **Flashing to eMMC with SDK Manager -- Step 3**, select the required SDK and run through the installation again.
+
+5. Finally, try to uninstall and reinstall the relevant SDK.
+
+### Troubleshooting installation using the command line
+
+The command line installation method is relatively simple, and is often prone to error in scenarios where force recovery mode is used.
+
+If you encounter the error shown below in **Flashing to eMMC with command-line -- Step 2**, you probably did not succeed in getting the Carrier Board into force recovery mode. Please pay special attention, do not enter force recovery mode with the Carrier Board powered on, as this is not valid.
+
+
+
+If you can't get into the system in **Flashing to eMMC with command-line -- Step 3** and are stuck on the boot up display command line, you probably did not exit force recovery mode. Likewise, it is not valid for you to unplug the jumper to exit force recovery mode while the Carrier Board is powered up, this all needs to be done while you are powered down.
+
+
+
+!!!Note
+ If more storage space is needed, we can use SD card to expand the capacity, or burn the system on SD card, you can refer to our recommended solution [Flash System on SD card](https://wiki.seeedstudio.com/J101_Enable_SD_Card/)
+
+## Resources
+
+[reComputer J1020 datasheet](https://files.seeedstudio.com/wiki/reComputer-Jetson/reComputer-Jetson-J1020-w_o-power-adapter-datasheet.pdf)
+
+[reComptuer J102 (Also J202) Carrier Boards Schematic](https://files.seeedstudio.com/wiki/reComputer-Jetson/reComputer%20J202_V1.0_SCH_PDF_240822.pdf)
+
+[reComputer J1010 3D file](https://files.seeedstudio.com/products/NVIDIA-Jetson/J2021-Xavier-NX.stp)
+
+[Seeed Jetson Serials Catalog](https://files.seeedstudio.com/wiki/Seeed_Jetson/Seeed-NVIDIA_Jetson_Catalog_V1.4.pdf)
+
+[Seeed Studio Edge AI Success Stories](https://www.seeedstudio.com/blog/wp-content/uploads/2023/07/Seeed_NVIDIA_Jetson_Success_Cases_and_Examples.pdf)
+
+[Seeed Jetson Serials Comparision](https://www.seeedstudio.com/blog/nvidia-jetson-comparison-nano-tx2-nx-xavier-nx-agx-orin/)
+
+[Seeed Jetson Devices One Page](https://files.seeedstudio.com/wiki/Seeed_Jetson/Seeed-Jetson-one-pager.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_Jetson_Series_Introduction.md b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_Jetson_Series_Introduction.md
index f8da6094abfee..23ce69de95dec 100644
--- a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_Jetson_Series_Introduction.md
+++ b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_Jetson_Series_Introduction.md
@@ -1,206 +1,205 @@
----
-description: reComputer for Jetson Series
-title: reComputer for Jetson Series Introduction
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /reComputer_Jetson_Series_Introduction
-sku: 114992562,114110047,114110049,114110048,103110043,110991666,110061363,110061401,110061361,102991694,102991695,102991714,110061482,110061481
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-# reComputer for Jetson Series Introduction
-
-
-
-## ✨ Contributor Project
-
-- Public Seeed Studio Wiki Platform Updates
-- We have a task list for updating this page, which is categorized under our [contributor project](https://github.com/orgs/Seeed-Studio/projects/6/views/1?pane=issue&itemId=30957479), as we are dedicated to enhancing the user experience and providing better support through the development of our wiki platform.
-- [Your contribution to this page](https://github.com/orgs/Seeed-Studio/projects/6/views/1?pane=issue&itemId=35025656) is essential to us! We really value your input and would greatly appreciate your assistance in generating ideas.
-
-## Introduction
-
-reComputer for Jetson series are compact edge computers built with NVIDIA advanced AI embedded systems: reComputer J10 (Nano) and reComputer J20 (Xavier NX). With rich extension modules, industrial peripherals, thermal management combined with decades of Seeed’s hardware expertise, reComputer for Jetson is ready to help you accelerate and scale the next-gen AI product emerging in diverse AI scenarios.
-
-The series is compatible with NVIDIA Jetson software stack, cloud-native workflows, industry-leading AI frameworks, helping deliver seamless AI integration. Currently, we have launched four of them as shown below:
-
-| Product | [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html ) | [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html) | [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html) | [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) |
-|-------------------------|----------------|----------------|------------------|------------------|
-| SKU | 110061362 |110061361 |110061363 | 110061401 |
-| Side View | | | | |
-| Equipped Module | Jetson Nano 4GB | Jetson Nano 4GB | Jetson Xavier NX 8GB | Jetson Xavier NX 16GB |
-| Operating carrier Board | J1010 Carrier Board | Jetson A206 | Jetson A206 |Jetson A206 |
-| Power Interface | Type-C connector | DC power adapter | DC power adapter | DC power adapter |
-|Link | | | | |
-
-## Interface Details
-
-The current 4 reComputer products have the same appearance, the difference lies in the interface on the back. [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) uses one interface combination, and the other three use the same other interface combination because there are two different carrier boards used in the chassis.
-
-### J1010 carrier board
-
-This carrier board is suitable for [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html).
-
-
-
-| Mark. | Name | Note |
-|-------|-------------------------|-----------------------|
-| | DCIN(Type-C interface) | Power supply only |
-| | HDMI | |
-| | 1x USB 3.0 Type-A port | |
-| | 2x USB 2.0 Type-A ports | |
-| | LAN | |
-| | USB Type-C port | Data transmitted only |
-
-### Jetson A206 carrier board
-
-This carrier board is for [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html), [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html), and [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html).
-
-
-
-| Mark. | Name | Note |
-|-------|-------------------------|-----------------------|
-| | DCIN(circular interface)| Power supply only |
-| | DP
-| | HDMI | |
-| | 4x USB 3.0 Type-A ports | |
-| | LAN | |
-| | Micro-B port | Data transmitted only |
-
-## What's in the box
-
-Before powering up and starting up, you need to make all the checks and preparations for the first turn on of the reComputer. Unpack the product you received and check that the contents of the package are complete according to the product model you purchased.
-
-### [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)
-
-
-
-**The list of box included:**
-
-- reComputer J1010, including:
- - 4G Jetson Nano module1 x1
- - J1010 carrier board x1
-
-**Accessories not included but required to power on:**
-
-- USB Keyboard and mouse
-- Display screen
-- Type-C power cable and power supply
-
-:::note
- There will be no Type-C power cable and power supply included in the product.
-:::
-
----
-
-### [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html)
-
-
-
-**The list of box included:**
-
-- reComputer J1020, including:
- - 4G Jetson Nano module1 x1
- - Jetson A206 carrier board x1
-- 12V/2A Power adapter (with 5 interchangeable adapter plugs) x1
-
-**Accessories not included but required to power on:**
-
-- USB Keyboard and mouse
-- Display screen
-
-:::note
-There will be 5 selectable power adapter for you. Type-C power cable and power supply included in the product. Hence, you can choose the one that is right for your country or region to power the reComputer without having to any additional power supply perchasing.
-:::
-
----
-
-### [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html)
-
-
-
-**The list of box included:**
-
-- reComputer Jetson J2011, including:
- - 8G Jetson Xavier NX module x1
- - Jetson A206 carrier board x1
-- 19V/4.74A (MAX 90W) Power adapter (without power supply cable) x1
-
-**Accessories not included but required to power on:**
-
-- USB Keyboard and mouse
-- Display screen
-- Adapter power supply cable
-
-:::note
-Please match the power supply cable for the power adapter according to your local power plug standard.
-:::
-
----
-
-### [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html)
-
-
-
-
-
-**The list of box included:**
-
-- reComputer J2012, including:
- - 16G Jetson Xavier NX module x1
- - Jetson A206 carrier board x1
-- 19V/4.74A (MAX 90W) Power adapter (without power supply cable) x1
-
-**Accessories not included but required to power on:**
-
-- USB Keyboard and mouse
-- Display screen
-- Adapter power supply cable
-
-:::note
-Please match the power supply cable for the power adapter according to your local power plug standard.
-:::
-
----
-
-## What‘s More
-
-We here present you more complete tables about NVIDIA® Jetson Module Powered Devices Comparison and NVIDIA® Jetson Module Compatible Carrier Boards Comparison. You can click the image or the title for a better look.
-
-### NVIDIA® Jetson Module Powered Devices Comparison
-
-
-
-## Resources
-
-- **[PDF]** [NVIDIA Jetson Devices and carrier boards comparision](https://files.seeedstudio.com/wiki/reComputer/NVIDIA-Jetson-Devices-and-carrier-boards-comparision.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: reComputer for Jetson Series
+title: reComputer for Jetson Series Introduction
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /reComputer_Jetson_Series_Introduction
+sku: 114992562,114110047,114110049,114110048,103110043,110991666,110061363,110061401,110061361,102991694,102991695,102991714,110061482,110061481
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+# reComputer for Jetson Series Introduction
+
+
+
+## ✨ Contributor Project
+
+- Public Seeed Studio Wiki Platform Updates
+- We have a task list for updating this page, which is categorized under our [contributor project](https://github.com/orgs/Seeed-Studio/projects/6/views/1?pane=issue&itemId=30957479), as we are dedicated to enhancing the user experience and providing better support through the development of our wiki platform.
+- [Your contribution to this page](https://github.com/orgs/Seeed-Studio/projects/6/views/1?pane=issue&itemId=35025656) is essential to us! We really value your input and would greatly appreciate your assistance in generating ideas.
+
+## Introduction
+
+reComputer for Jetson series are compact edge computers built with NVIDIA advanced AI embedded systems: reComputer J10 (Nano) and reComputer J20 (Xavier NX). With rich extension modules, industrial peripherals, thermal management combined with decades of Seeed’s hardware expertise, reComputer for Jetson is ready to help you accelerate and scale the next-gen AI product emerging in diverse AI scenarios.
+
+The series is compatible with NVIDIA Jetson software stack, cloud-native workflows, industry-leading AI frameworks, helping deliver seamless AI integration. Currently, we have launched four of them as shown below:
+
+| Product | [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html ) | [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html) | [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html) | [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html) |
+|-------------------------|----------------|----------------|------------------|------------------|
+| SKU | 110061362 |110061361 |110061363 | 110061401 |
+| Side View | | | | |
+| Equipped Module | Jetson Nano 4GB | Jetson Nano 4GB | Jetson Xavier NX 8GB | Jetson Xavier NX 16GB |
+| Operating carrier Board | J1010 Carrier Board | Jetson A206 | Jetson A206 |Jetson A206 |
+| Power Interface | Type-C connector | DC power adapter | DC power adapter | DC power adapter |
+|Link | | | | |
+
+## Interface Details
+
+The current 4 reComputer products have the same appearance, the difference lies in the interface on the back. [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html) uses one interface combination, and the other three use the same other interface combination because there are two different carrier boards used in the chassis.
+
+### J1010 carrier board
+
+This carrier board is suitable for [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html).
+
+
+
+| Mark. | Name | Note |
+|-------|-------------------------|-----------------------|
+| | DCIN(Type-C interface) | Power supply only |
+| | HDMI | |
+| | 1x USB 3.0 Type-A port | |
+| | 2x USB 2.0 Type-A ports | |
+| | LAN | |
+| | USB Type-C port | Data transmitted only |
+
+### Jetson A206 carrier board
+
+This carrier board is for [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html), [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html), and [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html).
+
+
+
+| Mark. | Name | Note |
+|-------|-------------------------|-----------------------|
+| | DCIN(circular interface)| Power supply only |
+| | DP
+| | HDMI | |
+| | 4x USB 3.0 Type-A ports | |
+| | LAN | |
+| | Micro-B port | Data transmitted only |
+
+## What's in the box
+
+Before powering up and starting up, you need to make all the checks and preparations for the first turn on of the reComputer. Unpack the product you received and check that the contents of the package are complete according to the product model you purchased.
+
+### [reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)
+
+
+
+**The list of box included:**
+
+- reComputer J1010, including:
+ - 4G Jetson Nano module1 x1
+ - J1010 carrier board x1
+
+**Accessories not included but required to power on:**
+
+- USB Keyboard and mouse
+- Display screen
+- Type-C power cable and power supply
+
+:::note
+ There will be no Type-C power cable and power supply included in the product.
+:::
+
+---
+
+### [reComputer J1020](https://www.seeedstudio.com/Jetson-10-1-H0-p-5335.html)
+
+
+
+**The list of box included:**
+
+- reComputer J1020, including:
+ - 4G Jetson Nano module1 x1
+ - Jetson A206 carrier board x1
+- 12V/2A Power adapter (with 5 interchangeable adapter plugs) x1
+
+**Accessories not included but required to power on:**
+
+- USB Keyboard and mouse
+- Display screen
+
+:::note
+There will be 5 selectable power adapter for you. Type-C power cable and power supply included in the product. Hence, you can choose the one that is right for your country or region to power the reComputer without having to any additional power supply perchasing.
+:::
+
+---
+
+### [reComputer J2011](https://www.seeedstudio.com/Jetson-20-1-H1-p-5328.html)
+
+
+
+**The list of box included:**
+
+- reComputer Jetson J2011, including:
+ - 8G Jetson Xavier NX module x1
+ - Jetson A206 carrier board x1
+- 19V/4.74A (MAX 90W) Power adapter (without power supply cable) x1
+
+**Accessories not included but required to power on:**
+
+- USB Keyboard and mouse
+- Display screen
+- Adapter power supply cable
+
+:::note
+Please match the power supply cable for the power adapter according to your local power plug standard.
+:::
+
+---
+
+### [reComputer J2012](https://www.seeedstudio.com/Jetson-20-1-H2-p-5329.html)
+
+
+
+
+
+**The list of box included:**
+
+- reComputer J2012, including:
+ - 16G Jetson Xavier NX module x1
+ - Jetson A206 carrier board x1
+- 19V/4.74A (MAX 90W) Power adapter (without power supply cable) x1
+
+**Accessories not included but required to power on:**
+
+- USB Keyboard and mouse
+- Display screen
+- Adapter power supply cable
+
+:::note
+Please match the power supply cable for the power adapter according to your local power plug standard.
+:::
+
+---
+
+## What‘s More
+
+We here present you more complete tables about NVIDIA® Jetson Module Powered Devices Comparison and NVIDIA® Jetson Module Compatible Carrier Boards Comparison. You can click the image or the title for a better look.
+
+### NVIDIA® Jetson Module Powered Devices Comparison
+
+
+
+## Resources
+
+- **[PDF]** [NVIDIA Jetson Devices and carrier boards comparision](https://files.seeedstudio.com/wiki/reComputer/NVIDIA-Jetson-Devices-and-carrier-boards-comparision.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_Getting_Started.md b/docs/Edge/ODYSSEY/ODYSSEY_Getting_Started.md
index ea9aa077ae629..11811739ea4e4 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_Getting_Started.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_Getting_Started.md
@@ -6,7 +6,6 @@ slug: /ODYSSEY_Getting_Started
last_update:
date: 01/03/2023
author: w0x7ce
-
---
Please check with the latest version: https://wiki.seeedstudio.com/ODYSSEY-X86J4105/
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/ODYSSEY-STM32MP157C.md b/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/ODYSSEY-STM32MP157C.md
index 9efd2220ac563..72800578df112 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/ODYSSEY-STM32MP157C.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/ODYSSEY-STM32MP157C.md
@@ -7,7 +7,6 @@ sku: 102110319
last_update:
date: 01/03/2023
author: w0x7ce
-
---
# ODYSSEY – STM32MP157C
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/SEEED-SOM-STM32MP157C.md b/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/SEEED-SOM-STM32MP157C.md
index cf9f7f9afc871..91cf9872c1759 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/SEEED-SOM-STM32MP157C.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_STM32MP157C/SEEED-SOM-STM32MP157C.md
@@ -1,2364 +1,2363 @@
----
-description: Seeed SOM – STM32MP157C
-title: Seeed Studio SOM STM32MP157C
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /SEEED-SOM-STM32MP157C
-sku: 102110318
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-
-
-SOM - STM32MP157C is the SOM based on STM32MP157C, STM32MP157C is a dual-core arm-cortex-a7 core processor operating at 650Mhz, the processor is also integrated with the Arm cortex-m4 coprocessor, Arm cortex-m4 integrates FPU and MPU. Cortex-a7 mainly does things at the operating system level, Cortex-m handles things at the MCU level. It can reach the optimal state at any time, making it suitable for various application scenarios.
-
-## Features
-
-- Dual-core Arm-Cortex-A7 core processor with Cortex-M4 integrated
-- Open-source hardware/SDK/API/BSP/OS
-- ODYSSEY – STM32MP157C SoM
-- 4GB eMMC, rich interfaces for development
-
-## Applications
-
-- Industrial (CAN-Ethernet gateways etc)
-- White goods(refrigerators, microwaves etc)
-- Medical(data loggers etc)
-- High-end wearables(VR device etc)
-- Smart Home Devices
-
-## Specifications
-
-|Item|Value|
-|----|------|
-|MPU(STM32MP157C)|1 x 32-bit dual-core Arm Cortex-A7 1 x 32-bit Arm Cortex-M4 with FPU/MPU|
-|PMU|1 x ST PMIC STPMIC1A |
-|RAM|1 x 512MB DDR3 RAM|
-|Flash|1 x 4GB EMMC|
-|Peripheral Interface|3 x board-to-board 70-Pin connector|
-|dimension|38mm x 38mm|
-
-## Hardware
-
-Here are the hardware details for Seeed SoM - STM32MP157C:
-
-
-
-- **1.STM32MP157C:** Development board main control chip(Dual architecture processor: Arm® Cortex®-A7 and Cortex®-M4 )
-
-- **2.MT41K256M16TW-107:P:** 512M16bitRAM Memory Chip
-
-- **3.STPMIC1APQR:** Power Management Chip
-
-- **4.EMMC04G-M627:** 4GeMMC Memory
-
-- **5.LED:** When the power supply is successful, the PWR will go on. When the system is running normally, the USER will keep flashing.
-
-- **6.70-PIN connector:** You can find the function for each pin from the table below:
-
-
-
-## Resourses
-
------
-
-- **[PDF]** [STM32MP157C Datasheet](https://files.seeedstudio.com/wiki/Seeed-NPi-STM32MP157C/Hardware/stm32mp157c.pdf)
-- **[PDF]** [Seeed STM32MP157C SOM Connecter Datasheet](https://files.seeedstudio.com/wiki/Seeed-NPi-STM32MP157C/Hardware/SMD+BTB+CONN%3B70P-0.4-L15.52%C3%97W2.97%C3%97H1.14mm_Specification.pdf)
-- **[PDF]** [Seeed STM32MP157C SOM v1.0 bottom.pdf](https://files.seeedstudio.com/wiki/SEEED-SOM-STM32MP157C/res/Seeed_SoM-STM32MP157C_v1.0_bottom.pdf)
-- **[SCH]** [Seeed STM32MP157C SOM](https://files.seeedstudio.com/wiki/Seeed-NPi-STM32MP157C/Hardware/Seeed%20SoM%20-%20STM32MP157C%20v1.0_191212.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: Seeed SOM – STM32MP157C
+title: Seeed Studio SOM STM32MP157C
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /SEEED-SOM-STM32MP157C
+sku: 102110318
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+
+
+SOM - STM32MP157C is the SOM based on STM32MP157C, STM32MP157C is a dual-core arm-cortex-a7 core processor operating at 650Mhz, the processor is also integrated with the Arm cortex-m4 coprocessor, Arm cortex-m4 integrates FPU and MPU. Cortex-a7 mainly does things at the operating system level, Cortex-m handles things at the MCU level. It can reach the optimal state at any time, making it suitable for various application scenarios.
+
+## Features
+
+- Dual-core Arm-Cortex-A7 core processor with Cortex-M4 integrated
+- Open-source hardware/SDK/API/BSP/OS
+- ODYSSEY – STM32MP157C SoM
+- 4GB eMMC, rich interfaces for development
+
+## Applications
+
+- Industrial (CAN-Ethernet gateways etc)
+- White goods(refrigerators, microwaves etc)
+- Medical(data loggers etc)
+- High-end wearables(VR device etc)
+- Smart Home Devices
+
+## Specifications
+
+|Item|Value|
+|----|------|
+|MPU(STM32MP157C)|1 x 32-bit dual-core Arm Cortex-A7 1 x 32-bit Arm Cortex-M4 with FPU/MPU|
+|PMU|1 x ST PMIC STPMIC1A |
+|RAM|1 x 512MB DDR3 RAM|
+|Flash|1 x 4GB EMMC|
+|Peripheral Interface|3 x board-to-board 70-Pin connector|
+|dimension|38mm x 38mm|
+
+## Hardware
+
+Here are the hardware details for Seeed SoM - STM32MP157C:
+
+
+
+- **1.STM32MP157C:** Development board main control chip(Dual architecture processor: Arm® Cortex®-A7 and Cortex®-M4 )
+
+- **2.MT41K256M16TW-107:P:** 512M16bitRAM Memory Chip
+
+- **3.STPMIC1APQR:** Power Management Chip
+
+- **4.EMMC04G-M627:** 4GeMMC Memory
+
+- **5.LED:** When the power supply is successful, the PWR will go on. When the system is running normally, the USER will keep flashing.
+
+- **6.70-PIN connector:** You can find the function for each pin from the table below:
+
+
+
+## Resourses
+
+-----
+
+- **[PDF]** [STM32MP157C Datasheet](https://files.seeedstudio.com/wiki/Seeed-NPi-STM32MP157C/Hardware/stm32mp157c.pdf)
+- **[PDF]** [Seeed STM32MP157C SOM Connecter Datasheet](https://files.seeedstudio.com/wiki/Seeed-NPi-STM32MP157C/Hardware/SMD+BTB+CONN%3B70P-0.4-L15.52%C3%97W2.97%C3%97H1.14mm_Specification.pdf)
+- **[PDF]** [Seeed STM32MP157C SOM v1.0 bottom.pdf](https://files.seeedstudio.com/wiki/SEEED-SOM-STM32MP157C/res/Seeed_SoM-STM32MP157C_v1.0_bottom.pdf)
+- **[SCH]** [Seeed STM32MP157C SOM](https://files.seeedstudio.com/wiki/Seeed-NPi-STM32MP157C/Hardware/Seeed%20SoM%20-%20STM32MP157C%20v1.0_191212.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Azure_IoT_for_ODYSSEY/ODYSSEY-X86J4105-AzureIOT.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Azure_IoT_for_ODYSSEY/ODYSSEY-X86J4105-AzureIOT.md
index 5d64f75035a13..c6b9bd6e57701 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Azure_IoT_for_ODYSSEY/ODYSSEY-X86J4105-AzureIOT.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Azure_IoT_for_ODYSSEY/ODYSSEY-X86J4105-AzureIOT.md
@@ -1,421 +1,420 @@
----
-description: ODYSSEY - X86J41x5
-title: Azure IoT
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-AzureIOT
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 03/16/2023
- author: Lakshantha
-
----
-
-
-
-# Edge IoT - Sending Sensor Data to Cloud
-
-This tutorial demonstrate how to read sensor values connnected to the ODYSSEY - X86J41x5 and sends the data to **Microsoft Azure IoT Hub**, where this data can be displayed or processed for further IoT applications.
-
-## Receiving Raw Data
-
-
-
-## Visulization of Data
-
-
-
-## Introduction
-
-[IoT Hub](https://azure.microsoft.com/en-us/services/iot-hub/) is an Microsoft Azure service that enables you to ingest high volumes of telemetry from your IOT devices into cloud for storing or processing.
-
-## Prerequireties
-
-- Install [Python 3](https://www.python.org/downloads/windows/) on ODYSSEY - X86J41x5
-
-- An Microsoft Azure account. If you don't have one, create a [free account](https://azure.microsoft.com/en-us/free/?WT.mc_id=A261C142F) before you begin.
-
-- Download and Install [Azure CLI](https://docs.microsoft.com/en-us/cli/azure/install-azure-cli?view=azure-cli-latest), a command-line tool for managing Azure resources.
-
-Once installed Azure CLI, open `cmd` or `Powershell` and run `az` command and you should see screen as below:
-
-
-
-## Azure CLI Pre-configurations
-
-### Log into Azure
-
-Open `cmd` or `Powershell` and run the `az login` command. A browser window will appear and log in your Microsoft Azure account.
-
-
-
-### Adding Microsoft IoT Azure Extensions for Azure CLI
-
-Run the following command to add the Microsoft Azure IoT Extension for Azure CLI to your Cloud Shell instance. The IOT Extension adds IoT Hub, IoT Edge, and IoT Device Provisioning Service (DPS) specific commands to Azure CLI.
-
-```shell
-az extension add --name azure-cli-iot-ext
-```
-
-## Creating an IoT Hub
-
-This part describes how to create an IoT Hub using Azure portal:
-
-1.Sign in to the [**Azure portal**](https://portal.azure.com).
-
-2.Choose **Create an resource**, and *Search the Marketplace* **IoT Hub**.
-
-3.Select **IoT Hub** and click **Create**.
-
-4.On the **Basics** tab, complete the field:
-
-- **Subscription:** Select the subscription to use for your hub.
-
-- **Resource Group:** Select a resource group or create a new one. To create a new one, select **Create new** and fill in the name you want to use.
-
-- **Region:** Select the region in which your hub to be located. Select the region that is closest to you.
-
-- **IoT Hub Name:** Enter a name for your IoT hub. This name must be globally unique. If name is available, a green check mark will appear.
-
-**Important Note:** the IoT hub will be pubilicity discoverable as a DNS endpoint, so ensure to avoid any sensitive information while naming the IoT Hub.
-
-
-
-1.Select **Next: Size and scale** to continue:
-
-- **Pricing and scale tier:** Select **F1: Free tier** for now. You can choose from several tiers, depending on how many features and how many messages you send through your solution per day.
-
-2.Select **Review + create** tab to review settings and click **Create** to create your new IoT Hub. Creating the IoT might take few minutes.
-
-
-
-## Register a Device
-
-A device must be registered with your IoT Hub before it can connect:
-
-1.Run the following command in `cmd` or `Powershell` to add the IoT Hub CLI extension and to create the device identity:
-
-```sh
-az iot hub device-identity create --hub-name iot-test-1 --device-id MyPythonDevice
-```
-
-### Note
-
-- `hub-name` -> Replace `iot-test-1` with your created IoT Hub name.
-
-- `device-id` -> `MyPythonDevice`. This is the name of the device that is registering. In my case, MyPythonDevice is the device id.
-
-2.Run the following commands to get the *device connection string* for the device we registered.
-
-```sh
-az iot hub device-identity show-connection-string --hub-name iot-test-1 --device-id MyPythonDevice --output table
-```
-
-Make a note of the device connection string, which looks like: `HostName={YourIoTHubName}.azure-devices.net;DeviceId=MyPythonDevice;SharedAccessKey={YourSharedAccessKey}`. This will be used later.
-
-### Note
-
-- Replace your `hub-name` and `device-id`, the same as above.
-
-
-
-## Collecting Data using Arduino Core
-
-This section simply use Arduino core to read sensor values and prints the readings to the Serial monitor, which can be read using python from elsewhere.
-
-1.Follow Getting Started to download, install and configure **Arduino IDE**.
-
-2.Connect a Grove Light sensor signal wire to **A0** of ODYSSEY - X86J41x5, and also power and ground. Please refer to to Pinout diagram in Getting Started for more information.
-
-3.Upload the following Code to ODYSSEY - X86J41x5 using Arduino IDE. Remember to select the correct **Board** and **Port**. Make a note of the **Port** here, which will be used later. In my case, the port is `COM4`.
-
-### Arduino Code
-
-```cpp
-#define LIGHT A0
-#define Serial SerialUSB
-
-void setup() {
- // put your setup code here, to run once:
- Serial.begin(115200);
- pinMode(LIGHT, INPUT);
-
-}
-
-void loop() {
- // put your main code here, to run repeatedly:
- int state = analogRead(LIGHT);
- Serial.println(state);
-
- delay(500);
-
-}
-```
-
-4.Open **Serial Monitor** in Arduino IDE to check if the program is running correctly.
-
-## Sending Light Sensor Readings to Azure IoT Hub
-
-The light sensor readings are printed to Serial, and Python is used to extract this data an send to Azure IoT Hub.
-
-1.Open `Powershell` and run the following command to install the required python libraries.
-
-```sh
-pip install azure-iot-device
-pip install pyserial
-```
-
-2.Copy the following Python code and Save it to your Local Drive. Use a text editor to make the following changes.
-
-- Replace the value of the `serialPort` variable to the Serial Port that we made a note easier.
-
-- Replace the value of the `CONNECTION_STRING` variable with the device connection string that we also made a note earlier.
-
-### Python Code
-
-```py
-# Copyright (c) Microsoft. All rights reserved.
-# Licensed under the MIT license. See LICENSE file in the project root for full license information.
-
-import time
-import serial
-
-
-# Using the Python Device SDK for IoT Hub:
-# https://github.com/Azure/azure-iot-sdk-python
-# The sample connects to a device-specific MQTT endpoint on your IoT Hub.
-from azure.iot.device import IoTHubDeviceClient, Message
-
-# Settings for reading from Arduino Serial
-serialPort= "COM4" #Change it to your Serial Port, Check in Arudino IDE
-baudRate = 115200
-ser = serial.Serial(serialPort, baudRate, timeout=0.5)
-
-# The device connection string to authenticate the device with your IoT hub.
-# Using the Azure CLI:
-# az iot hub device-identity show-connection-string --hub-name {YourIoTHubName} --device-id MyNodeDevice --output table
-CONNECTION_STRING = "HostName=iot-test-1.azure-devices.net;DeviceId=MyPythonDevice;SharedAccessKey=xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
-
-# Define the JSON message to send to IoT Hub.
-MSG_TXT = '{{"Light": {light}}}'
-
-def iothub_client_init():
- # Create an IoT Hub client
- client = IoTHubDeviceClient.create_from_connection_string(CONNECTION_STRING)
- return client
-
-def iothub_client_telemetry_sample_run():
-
- try:
- client = iothub_client_init()
- print ( "IoT Hub device sending periodic messages, press Ctrl-C to exit" )
-
- while True:
- # Build the message with simulated telemetry values.
- time.sleep(0.1)
- light = ser.readline().decode("UTF-8")[:-2]
- if light:
- msg_txt_formatted = MSG_TXT.format(light=light)
- message = Message(msg_txt_formatted)
-
- # Send the message.
- print( "Sending message: {}".format(message) )
- client.send_message(message)
- print ( "Message successfully sent" )
- time.sleep(1)
-
-
- except KeyboardInterrupt:
- print ( "IoTHubClient sample stopped" )
- ser.close()
-
-if __name__ == '__main__':
- print ( "IoT Hub Quickstart #1 - Simulated device" )
- print ( "Press Ctrl-C to exit" )
- iothub_client_telemetry_sample_run()
-```
-
-3.In `Powershell`, navigate to the directory that you just saved the python file. Run the Python script to send the sensor data to Azure IoT Hub.
-
-**Note:** In my case, the Python file is named `SendingData.py`, change the command to the name you saved the file.
-
-```sh
-python3 SendingData.py
-```
-
-The following screenshot shows the output of sending sensor data to Azure IoT Hub.
-
-
-
-## Reading Data from Azure IoT Hub
-
-The IoT Hub CLI extension can connect to the service-side Events endpoint on IoT Hub. The extension receives the device-to-cloud messages sent from our device.
-
-Run the following command in any terminal and you can start monitoring messages sent to the Azure IoT Hub.
-
-```sh
-az iot hub monitor-events --hub-name iot-test-1 --device-id MyPythonDevice
-```
-
-### Note
-
-- Replace your `hub-name` and `device-id`, the same as above.
-
-The following screenshot shows the messages sent from ODYSSEY - X86J41x5 to the Iot Hub. This data can be processed or displayed.
-
-
-
----
-
-## Real-time visualization of Sensor data Using Microsoft Power BI
-
-In this section, we will process to display the light sensor reading in real-time using [Microsoft Power BI](https://powerbi.microsoft.com/en-us/). If you don't have a Power BI account, sign up a free a account before you begin.
-
-**Note: Make sure you have followed all the previous steps and messages can be receive by the IoT Hub sucessfully.**
-
-## Add a consumer group to your IoT Hub
-
-[Consumer groups](https://docs.microsoft.com/zh-cn/azure/event-hubs/event-hubs-features#event-consumers) provide independent views into the event stream that enable apps and Azure services to independently consume data from the same Event Hub endpoint.
-
-To add a consumer group:
-
-1.Sign in to the [**Azure portal**](https://portal.azure.com).
-
-2.Open your IoT Hub, select **Built-in endpoints**, under **Consumer Groups** enter a name to create a new consumer group, and **Save**.
-
-
-
-In my case, `lightsensor` is the new consumer group.
-
-## Create, configure and run a Stream Analytic Job
-
-To create a Stream Analytic Job:
-
-3.Sign in to the [**Azure portal**](https://portal.azure.com).
-
-4.Choose **Create an resource**, and *Search the Marketplace* **Stream Analytics job**.
-
-5.Select **Stream Analytics job** and click **Create**.
-
-6.Complete the field as follow, and **Create**:
-
-- **Job name:** The name of the job. The name must be globally unique. In my case, it is `light-analytic`
-
-- **Resource group:** Use the same resource group that your IoT hub uses.
-
-- **Location:** Use the same location as your resource group.
-
-
-
-## Add an Input to the Stream Analytics job
-
-1.Open the Stream Analytics job
-
-2.Under **Job topology** click **Inputs**.
-
-3.Click **Add stream input** -> **IoT Hub**
-
-4.Complete the field as follow:
-
-- **Input alias:** Your input name. This can be anything.
-
-- **IoT Hub:** Choose the one we used all along.
-
-- **Consumer group**: Choose the one we just created.
-
-
-
-1.Select **Save**.
-
-## Add an Output to the Stream Analytics Job
-
-2.Open the Stream Analytics job
-
-3.Under **Job topology** click **Outputs**.
-
-4.Click **Add** -> **Power BI**
-
-5.**Authorize** with your Microsoft Power BI account.
-
-6.Complete the field as follows:
-
-- **Output alias:** Your output name. This also be can anything.
-
-- **Authentication mode:** Choose User token.
-
-
-
-7.Select **Save**.
-
-## Configure the query of the Stream Analytics job
-
-1.Under **Job topology** click **Query**.
-
-2.Replace `[YourInputAlias]` with the input alias. In my case, it is `SensorReadings`.
-
-3.Replace `[YourOutputAlias]` with the output alias. In my case, it is `SensorOutput`.
-
-
-
-## Run the Stream Analytics job
-
-1.Under **Overview** click **Start** -> **Now** -> **Start**. The job status changes from **Stopped** to **Running**.
-
-
-
-**Note: To start getting sensor readings, remember to run the Python script in ODYSSEY - X86J41x5 to send data to cloud.**
-
-## Create and publish a Power BI report to visulize data
-
-1.Sign in to your [Power BI](https://app.powerbi.com/signupredirect?pbi_source=web) account.
-
-2.Under **Workplaces** -> **My workspace**, select **Datasets** and you should see the datasheet you specified earlier.
-
-3.Under **Actions** select the **first icon(Create report)**
-
-
-
-4.Create a line chart to show real-time light sensor value over time.
-
-- Under **Visualizations** select **Line chart**.
-
-- Under Fields select **EventEnqueuedUtcTime**.
-
-- Under Fields select **Light**.
-
-
-
-5.Click **Save** to save Report.
-
-6.Click **File** -> **Publish to web** -> **Create embed code** -> **Publish**
-
-Now you can view the sensor reading on a dashboard via Power BI!
-
-
-
-Microsoft also offers the [Power BI mobile apps](https://powerbi.microsoft.com/en-us/documentation/powerbi-power-bi-apps-for-mobile-devices/) for viewing and interacting with your Power BI dashboards and reports on your mobile device.
-
-## Further Development
-
-You've successfully set up your ODYSSEY - X86J41x5 for one of the IoT scenario, you can now implement this and build your own IoT solutions!
-
-*For more technical support please visit [Azure IoT](https://azure.microsoft.com/en-us/overview/iot/).*
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Azure IoT
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-AzureIOT
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 03/16/2023
+ author: Lakshantha
+---
+
+
+
+# Edge IoT - Sending Sensor Data to Cloud
+
+This tutorial demonstrate how to read sensor values connnected to the ODYSSEY - X86J41x5 and sends the data to **Microsoft Azure IoT Hub**, where this data can be displayed or processed for further IoT applications.
+
+## Receiving Raw Data
+
+
+
+## Visulization of Data
+
+
+
+## Introduction
+
+[IoT Hub](https://azure.microsoft.com/en-us/services/iot-hub/) is an Microsoft Azure service that enables you to ingest high volumes of telemetry from your IOT devices into cloud for storing or processing.
+
+## Prerequireties
+
+- Install [Python 3](https://www.python.org/downloads/windows/) on ODYSSEY - X86J41x5
+
+- An Microsoft Azure account. If you don't have one, create a [free account](https://azure.microsoft.com/en-us/free/?WT.mc_id=A261C142F) before you begin.
+
+- Download and Install [Azure CLI](https://docs.microsoft.com/en-us/cli/azure/install-azure-cli?view=azure-cli-latest), a command-line tool for managing Azure resources.
+
+Once installed Azure CLI, open `cmd` or `Powershell` and run `az` command and you should see screen as below:
+
+
+
+## Azure CLI Pre-configurations
+
+### Log into Azure
+
+Open `cmd` or `Powershell` and run the `az login` command. A browser window will appear and log in your Microsoft Azure account.
+
+
+
+### Adding Microsoft IoT Azure Extensions for Azure CLI
+
+Run the following command to add the Microsoft Azure IoT Extension for Azure CLI to your Cloud Shell instance. The IOT Extension adds IoT Hub, IoT Edge, and IoT Device Provisioning Service (DPS) specific commands to Azure CLI.
+
+```shell
+az extension add --name azure-cli-iot-ext
+```
+
+## Creating an IoT Hub
+
+This part describes how to create an IoT Hub using Azure portal:
+
+1.Sign in to the [**Azure portal**](https://portal.azure.com).
+
+2.Choose **Create an resource**, and *Search the Marketplace* **IoT Hub**.
+
+3.Select **IoT Hub** and click **Create**.
+
+4.On the **Basics** tab, complete the field:
+
+- **Subscription:** Select the subscription to use for your hub.
+
+- **Resource Group:** Select a resource group or create a new one. To create a new one, select **Create new** and fill in the name you want to use.
+
+- **Region:** Select the region in which your hub to be located. Select the region that is closest to you.
+
+- **IoT Hub Name:** Enter a name for your IoT hub. This name must be globally unique. If name is available, a green check mark will appear.
+
+**Important Note:** the IoT hub will be pubilicity discoverable as a DNS endpoint, so ensure to avoid any sensitive information while naming the IoT Hub.
+
+
+
+1.Select **Next: Size and scale** to continue:
+
+- **Pricing and scale tier:** Select **F1: Free tier** for now. You can choose from several tiers, depending on how many features and how many messages you send through your solution per day.
+
+2.Select **Review + create** tab to review settings and click **Create** to create your new IoT Hub. Creating the IoT might take few minutes.
+
+
+
+## Register a Device
+
+A device must be registered with your IoT Hub before it can connect:
+
+1.Run the following command in `cmd` or `Powershell` to add the IoT Hub CLI extension and to create the device identity:
+
+```sh
+az iot hub device-identity create --hub-name iot-test-1 --device-id MyPythonDevice
+```
+
+### Note
+
+- `hub-name` -> Replace `iot-test-1` with your created IoT Hub name.
+
+- `device-id` -> `MyPythonDevice`. This is the name of the device that is registering. In my case, MyPythonDevice is the device id.
+
+2.Run the following commands to get the *device connection string* for the device we registered.
+
+```sh
+az iot hub device-identity show-connection-string --hub-name iot-test-1 --device-id MyPythonDevice --output table
+```
+
+Make a note of the device connection string, which looks like: `HostName={YourIoTHubName}.azure-devices.net;DeviceId=MyPythonDevice;SharedAccessKey={YourSharedAccessKey}`. This will be used later.
+
+### Note
+
+- Replace your `hub-name` and `device-id`, the same as above.
+
+
+
+## Collecting Data using Arduino Core
+
+This section simply use Arduino core to read sensor values and prints the readings to the Serial monitor, which can be read using python from elsewhere.
+
+1.Follow Getting Started to download, install and configure **Arduino IDE**.
+
+2.Connect a Grove Light sensor signal wire to **A0** of ODYSSEY - X86J41x5, and also power and ground. Please refer to to Pinout diagram in Getting Started for more information.
+
+3.Upload the following Code to ODYSSEY - X86J41x5 using Arduino IDE. Remember to select the correct **Board** and **Port**. Make a note of the **Port** here, which will be used later. In my case, the port is `COM4`.
+
+### Arduino Code
+
+```cpp
+#define LIGHT A0
+#define Serial SerialUSB
+
+void setup() {
+ // put your setup code here, to run once:
+ Serial.begin(115200);
+ pinMode(LIGHT, INPUT);
+
+}
+
+void loop() {
+ // put your main code here, to run repeatedly:
+ int state = analogRead(LIGHT);
+ Serial.println(state);
+
+ delay(500);
+
+}
+```
+
+4.Open **Serial Monitor** in Arduino IDE to check if the program is running correctly.
+
+## Sending Light Sensor Readings to Azure IoT Hub
+
+The light sensor readings are printed to Serial, and Python is used to extract this data an send to Azure IoT Hub.
+
+1.Open `Powershell` and run the following command to install the required python libraries.
+
+```sh
+pip install azure-iot-device
+pip install pyserial
+```
+
+2.Copy the following Python code and Save it to your Local Drive. Use a text editor to make the following changes.
+
+- Replace the value of the `serialPort` variable to the Serial Port that we made a note easier.
+
+- Replace the value of the `CONNECTION_STRING` variable with the device connection string that we also made a note earlier.
+
+### Python Code
+
+```py
+# Copyright (c) Microsoft. All rights reserved.
+# Licensed under the MIT license. See LICENSE file in the project root for full license information.
+
+import time
+import serial
+
+
+# Using the Python Device SDK for IoT Hub:
+# https://github.com/Azure/azure-iot-sdk-python
+# The sample connects to a device-specific MQTT endpoint on your IoT Hub.
+from azure.iot.device import IoTHubDeviceClient, Message
+
+# Settings for reading from Arduino Serial
+serialPort= "COM4" #Change it to your Serial Port, Check in Arudino IDE
+baudRate = 115200
+ser = serial.Serial(serialPort, baudRate, timeout=0.5)
+
+# The device connection string to authenticate the device with your IoT hub.
+# Using the Azure CLI:
+# az iot hub device-identity show-connection-string --hub-name {YourIoTHubName} --device-id MyNodeDevice --output table
+CONNECTION_STRING = "HostName=iot-test-1.azure-devices.net;DeviceId=MyPythonDevice;SharedAccessKey=xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
+
+# Define the JSON message to send to IoT Hub.
+MSG_TXT = '{{"Light": {light}}}'
+
+def iothub_client_init():
+ # Create an IoT Hub client
+ client = IoTHubDeviceClient.create_from_connection_string(CONNECTION_STRING)
+ return client
+
+def iothub_client_telemetry_sample_run():
+
+ try:
+ client = iothub_client_init()
+ print ( "IoT Hub device sending periodic messages, press Ctrl-C to exit" )
+
+ while True:
+ # Build the message with simulated telemetry values.
+ time.sleep(0.1)
+ light = ser.readline().decode("UTF-8")[:-2]
+ if light:
+ msg_txt_formatted = MSG_TXT.format(light=light)
+ message = Message(msg_txt_formatted)
+
+ # Send the message.
+ print( "Sending message: {}".format(message) )
+ client.send_message(message)
+ print ( "Message successfully sent" )
+ time.sleep(1)
+
+
+ except KeyboardInterrupt:
+ print ( "IoTHubClient sample stopped" )
+ ser.close()
+
+if __name__ == '__main__':
+ print ( "IoT Hub Quickstart #1 - Simulated device" )
+ print ( "Press Ctrl-C to exit" )
+ iothub_client_telemetry_sample_run()
+```
+
+3.In `Powershell`, navigate to the directory that you just saved the python file. Run the Python script to send the sensor data to Azure IoT Hub.
+
+**Note:** In my case, the Python file is named `SendingData.py`, change the command to the name you saved the file.
+
+```sh
+python3 SendingData.py
+```
+
+The following screenshot shows the output of sending sensor data to Azure IoT Hub.
+
+
+
+## Reading Data from Azure IoT Hub
+
+The IoT Hub CLI extension can connect to the service-side Events endpoint on IoT Hub. The extension receives the device-to-cloud messages sent from our device.
+
+Run the following command in any terminal and you can start monitoring messages sent to the Azure IoT Hub.
+
+```sh
+az iot hub monitor-events --hub-name iot-test-1 --device-id MyPythonDevice
+```
+
+### Note
+
+- Replace your `hub-name` and `device-id`, the same as above.
+
+The following screenshot shows the messages sent from ODYSSEY - X86J41x5 to the Iot Hub. This data can be processed or displayed.
+
+
+
+---
+
+## Real-time visualization of Sensor data Using Microsoft Power BI
+
+In this section, we will process to display the light sensor reading in real-time using [Microsoft Power BI](https://powerbi.microsoft.com/en-us/). If you don't have a Power BI account, sign up a free a account before you begin.
+
+**Note: Make sure you have followed all the previous steps and messages can be receive by the IoT Hub sucessfully.**
+
+## Add a consumer group to your IoT Hub
+
+[Consumer groups](https://docs.microsoft.com/zh-cn/azure/event-hubs/event-hubs-features#event-consumers) provide independent views into the event stream that enable apps and Azure services to independently consume data from the same Event Hub endpoint.
+
+To add a consumer group:
+
+1.Sign in to the [**Azure portal**](https://portal.azure.com).
+
+2.Open your IoT Hub, select **Built-in endpoints**, under **Consumer Groups** enter a name to create a new consumer group, and **Save**.
+
+
+
+In my case, `lightsensor` is the new consumer group.
+
+## Create, configure and run a Stream Analytic Job
+
+To create a Stream Analytic Job:
+
+3.Sign in to the [**Azure portal**](https://portal.azure.com).
+
+4.Choose **Create an resource**, and *Search the Marketplace* **Stream Analytics job**.
+
+5.Select **Stream Analytics job** and click **Create**.
+
+6.Complete the field as follow, and **Create**:
+
+- **Job name:** The name of the job. The name must be globally unique. In my case, it is `light-analytic`
+
+- **Resource group:** Use the same resource group that your IoT hub uses.
+
+- **Location:** Use the same location as your resource group.
+
+
+
+## Add an Input to the Stream Analytics job
+
+1.Open the Stream Analytics job
+
+2.Under **Job topology** click **Inputs**.
+
+3.Click **Add stream input** -> **IoT Hub**
+
+4.Complete the field as follow:
+
+- **Input alias:** Your input name. This can be anything.
+
+- **IoT Hub:** Choose the one we used all along.
+
+- **Consumer group**: Choose the one we just created.
+
+
+
+1.Select **Save**.
+
+## Add an Output to the Stream Analytics Job
+
+2.Open the Stream Analytics job
+
+3.Under **Job topology** click **Outputs**.
+
+4.Click **Add** -> **Power BI**
+
+5.**Authorize** with your Microsoft Power BI account.
+
+6.Complete the field as follows:
+
+- **Output alias:** Your output name. This also be can anything.
+
+- **Authentication mode:** Choose User token.
+
+
+
+7.Select **Save**.
+
+## Configure the query of the Stream Analytics job
+
+1.Under **Job topology** click **Query**.
+
+2.Replace `[YourInputAlias]` with the input alias. In my case, it is `SensorReadings`.
+
+3.Replace `[YourOutputAlias]` with the output alias. In my case, it is `SensorOutput`.
+
+
+
+## Run the Stream Analytics job
+
+1.Under **Overview** click **Start** -> **Now** -> **Start**. The job status changes from **Stopped** to **Running**.
+
+
+
+**Note: To start getting sensor readings, remember to run the Python script in ODYSSEY - X86J41x5 to send data to cloud.**
+
+## Create and publish a Power BI report to visulize data
+
+1.Sign in to your [Power BI](https://app.powerbi.com/signupredirect?pbi_source=web) account.
+
+2.Under **Workplaces** -> **My workspace**, select **Datasets** and you should see the datasheet you specified earlier.
+
+3.Under **Actions** select the **first icon(Create report)**
+
+
+
+4.Create a line chart to show real-time light sensor value over time.
+
+- Under **Visualizations** select **Line chart**.
+
+- Under Fields select **EventEnqueuedUtcTime**.
+
+- Under Fields select **Light**.
+
+
+
+5.Click **Save** to save Report.
+
+6.Click **File** -> **Publish to web** -> **Create embed code** -> **Publish**
+
+Now you can view the sensor reading on a dashboard via Power BI!
+
+
+
+Microsoft also offers the [Power BI mobile apps](https://powerbi.microsoft.com/en-us/documentation/powerbi-power-bi-apps-for-mobile-devices/) for viewing and interacting with your Power BI dashboards and reports on your mobile device.
+
+## Further Development
+
+You've successfully set up your ODYSSEY - X86J41x5 for one of the IoT scenario, you can now implement this and build your own IoT solutions!
+
+*For more technical support please visit [Azure IoT](https://azure.microsoft.com/en-us/overview/iot/).*
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-*frigate show case image from [frigate official site](https://frigate.video/)
-
->"Frigate is an open source NVR built around real-time AI object detection. All processing is performed locally on your own hardware, and your camera feeds never leave your home." -- [Frigate NVR](https://frigate.video/)
-
-Frigate NVR is one of the most popular network video recorder project which adds local processed AI function to your security cameras, therefore not only you won't be charged with ridiculously amount of money for the cloud inference server, but also your valuable private camera stream date won't need to exposed to the wild internet. Frigate can process 100+ object detections per second with a single Google Coral TPU on board, you could customize the detect zones and masks to met your use case, it can also be integrated into Home Assistant and other automation platforms with minimum amount of setup effort to provide more security features and integrate Edge AI solutions to your valuable property.
-
-## Prerequisites
-
-- 1 x [Odyssey Blue: Quad Core Celeron J4125 Mini PC with 128GB external SSD](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products)
-- 1 x [Coral USB Accelerator](https://www.seeedstudio.com/coral-usb-accelerator-p-2899.html?queryID=8e8780bcccd9a9418d210fa8827db40f&objectID=2899&indexName=bazaar_retailer_products) (optional)
-- RTSP camera(s) stream
-- Keyboard and HDMI display
-
-Make sure [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) is connected to the same network or have access to your RTSP web camera.
-
-## Getting started
-
-In this guide, we will show you how to config Frigate docker environment to preform local AI detection on the RTSP camera stream on Seeed Studio [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) with [Coral USB Accelerator](https://www.seeedstudio.com/coral-usb-accelerator-p-2899.html?queryID=8e8780bcccd9a9418d210fa8827db40f&objectID=2899&indexName=bazaar_retailer_products), for home assistant add-on setup, please stay turned!!
-
- **STEP 1:** Make sure you have installed Debian 11 on [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products)
-
-Please go a head download [Debian 11](https://cdimage.debian.org/debian-cd/current/amd64/iso-dvd/debian-11.4.0-amd64-DVD-1.iso) OS image and follow [this](https://wiki.seeedstudio.com/ODYSSEY-X86J4105-Installing-OS/) setup guide to install Debian 11 Operating System on [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products).
-
-**STEP 2:** Make sure you have installed Docker Engine and Docker Compose on Debian 11
-
-Please follow the [Install Docker Engine on Debian](https://docs.docker.com/engine/install/debian/#install-using-the-repository) guide to install Docker Engine and Docker Compose.
-
-To check if you have successfully installed Docker:
-
-Please open the terminal app and type in following command:
-
-```bash
-docker -v
-```
-
-you should see following output printed in the terminal:
-
-
-
-**STEP 3:** Create frigate Docker file
-
-Type in following command in terminal app to create frigate docker file with vi text-editor:
-
-```bash
-1 mkdir ~/Documents/frigate
-2 cd ~/Documents/frigate
-3 vi frigate.yml
-```
-
-Insert following lines in the frigate.yml file for frigate docker-compose setup, and replace the necessary part according to your enviroment setup.
-
-```bash
-version: "3.9"
-services:
- frigate:
- container_name: frigate
- privileged: true # this may not be necessary for all setups
- restart: unless-stopped
- image: blakeblackshear/frigate:stable-amd64
- shm_size: "64mb" # update for your cameras based on calculation above
- devices:
- - /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
- - /dev/apex_0:/dev/apex_0 # passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
- - /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
- volumes:
- - /etc/localtime:/etc/localtime:ro
- - /path/to/your/config.yml:/config/config.yml:ro
- - /path/to/your/storage:/media/frigate
- - type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
- target: /tmp/cache
- tmpfs:
- size: 1000000000
- ports:
- - "5000:5000"
- - "1935:1935" # RTMP feeds
- environment:
- FRIGATE_RTSP_PASSWORD: "password"
-```
-
-For more details on the frigate docker-compose yaml setup options, please to go to the [frigate documentation page](https://docs.frigate.video/installation#docker)
-
-In my case, my frigate.yml looks like this:
-
-```bash
-version: "3.7"
-services:
- frigate:
- container_name: frigate
- privileged: true # this may not be necessary for all setups
- restart: unless-stopped
- image: blakeblackshear/frigate:stable-amd64
- shm_size: "64mb" # update for your cameras based on calculation above
- devices:
- - /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
- - /dev/apex_0:/dev/apex_0 # passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
- - /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
- volumes:
- - /etc/localtime:/etc/localtime:ro
- - /home/seeed/Documents/frigate/config/config.yml:/config/config.yml:ro
- - /home/seeed/Documents/frigate:/media/frigate
- - type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
- target: /tmp/cache
- tmpfs:
- size: 1000000000
- ports:
- - "5000:5000"
- - "1935:1935" # RTMP feeds
- environment:
- FRIGATE_RTSP_PASSWORD: "password"
-```
-
-**STEP 4:** Create frigate config file
-
-Type following command in terminal app to create a config folder:
-
-```bash
-1 cd ~/Documents/frigate
-2 mkdir config/
-3 cd config/
-```
-
-Type following command to create frigate config file with vi text-editor:
-
-```bash
-1 vi config.yml
-```
-
-Then copy following lines to for the minimum configuration setup to get frigate running:
-
-```bash
-mqtt:
- host: mqtt.server.com #Please replace with a valid mqtt broker
-cameras:
- back:
- ffmpeg:
- inputs:
- - path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2 #replace with your RTSP camera url
- roles:
- - detect
- - rtmp
- detect:
- width: 1280
- height: 720
-```
-
-Please to go to the frigate documentation page [configuration](https://docs.frigate.video/configuration/index) section for all the configuration options
-
-In my case, beside the following list of configs that I have customized according to my setup, all the rest config settings are kept as default:
-
-- MQTT: broker.hivemq.com
-- Detector: [Coral USB Accelerator](https://www.seeedstudio.com/coral-usb-accelerator-p-2899.html?queryID=8e8780bcccd9a9418d210fa8827db40f&objectID=2899&indexName=bazaar_retailer_products)
-- Cameras: rtsp://192.168.8.34:8080/unicast
-- Tracking object: person, cup (Note: the list of object labels can be found at frigate documentation page [Objects](https://docs.frigate.video/configuration/objects) section)
-- Record: when Person or Cup gets detected the during of the recording is 2s before detection and 2s after detection.
-
-So my config.yml looks like this:
-
-```bash
-mqtt:
- host: broker.hivemq.com # using HiveMQ MQTT Broker for testing purpose
-detectors:
- # Required: name of the detector
- coral:
- # Required: type of the detector
- # Valid values are 'edgetpu' (requires device property below) and 'cpu'.
- type: edgetpu
- # Optional: device name as defined here: https://coral.ai/docs/edgetpu/multiple-edgetpu/#using-the-tensorflow-lite-python-api
- device: usb
-# Optional: model modifications
-model:
- # Optional: path to the model (default: automatic based on detector)
- path: /edgetpu_model.tflite
- # Optional: path to the labelmap (default: shown below)
- labelmap_path: /labelmap.txt
- # Required: Object detection model input width (default: shown below)
- width: 320
- # Required: Object detection model input height (default: shown below)
- height: 320
-cameras:
- back:
- ffmpeg:
- inputs:
- - path: rtsp://192.168.8.34:8080/unicast
- roles:
- - detect
- - rtmp
-# Optional: Detect configuration
-# NOTE: Can be overridden at the camera level
-detect:
- # Optional: width of the frame for the input with the detect role (default: shown below)
- width: 800
- # Optional: height of the frame for the input with the detect role (default: shown below)
- height: 600
- # Optional: desired fps for your camera for the input with the detect role (default: shown below)
- # NOTE: Recommended value of 5. Ideally, try and reduce your FPS on the camera.
- fps: 8
- # Optional: enables detection for the camera (default: True)
- # This value can be set via MQTT and will be updated in startup based on retained value
- enabled: True
- # Optional: Number of frames without a detection before frigate considers an object to be gone. (default: 5x the frame rate)
- max_disappeared: 25
- # Optional: Configuration for stationary object tracking
- stationary:
- # Optional: Frequency for confirming stationary objects (default: shown below)
- # When set to 0, object detection will not confirm stationary objects until movement is detected.
- # If set to 10, object detection will run to confirm the object still exists on every 10th frame.
- interval: 0
- # Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
- threshold: 50
- # Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
- # This can help with false positives for objects that should only be stationary for a limited amount of time.
- # It can also be used to disable stationary object tracking. For example, you may want to set a value for person, but leave
- # car at the default.
- # WARNING: Setting these values overrides default behavior and disables stationary object tracking.
- # There are very few situations where you would want it disabled. It is NOT recommended to
- # copy these values from the example config into your config unless you know they are needed.
- max_frames:
- # Optional: Default for all object types (default: not set, track forever)
- default: 3000
- # Optional: Object specific values
- objects:
- person: 1000
-# Optional: Object configuration
-# NOTE: Can be overridden at the camera level
-objects:
- # Optional: list of objects to track from labelmap.txt (default: shown below)
- track:
- - person
- - cup
-# Optional: Record configuration
-# NOTE: Can be overridden at the camera level
-record:
- # Optional: Enable recording (default: shown below)
- # WARNING: If recording is disabled in the config, turning it on via
- # the UI or MQTT later will have no effect.
- # WARNING: Frigate does not currently support limiting recordings based
- # on available disk space automatically. If using recordings,
- # you must specify retention settings for a number of days that
- # will fit within the available disk space of your drive or Frigate
- # will crash.
- enabled: True
- # Optional: Number of minutes to wait between cleanup runs (default: shown below)
- # This can be used to reduce the frequency of deleting recording segments from disk if you want to minimize i/o
- expire_interval: 60
- # Optional: Retention settings for recording
- retain:
- # Optional: Number of days to retain recordings regardless of events (default: shown below)
- # NOTE: This should be set to 0 and retention should be defined in events section below
- # if you only want to retain recordings of events.
- days: 0
- # Optional: Mode for retention. Available options are: all, motion, and active_objects
- # all - save all recording segments regardless of activity
- # motion - save all recordings segments with any detected motion
- # active_objects - save all recording segments with active/moving objects
- # NOTE: this mode only applies when the days setting above is greater than 0
- mode: all
- # Optional: Event recording settings
- events:
- # Optional: Maximum length of time to retain video during long events. (default: shown below)
- # NOTE: If an object is being tracked for longer than this amount of time, the retained recordings
- # will be the last x seconds of the event unless retain->days under record is > 0.
- max_seconds: 300
- # Optional: Number of seconds before the event to include (default: shown below)
- pre_capture: 2
- # Optional: Number of seconds after the event to include (default: shown below)
- post_capture: 2
- # Optional: Objects to save recordings for. (default: all tracked objects)
- objects:
- - person
- - cup
- # Optional: Restrict recordings to objects that entered any of the listed zones (default: no required zones)
- required_zones: []
- # Optional: Retention settings for recordings of events
- retain:
- # Required: Default retention days (default: shown below)
- default: 10
- # Optional: Mode for retention. (default: shown below)
- # all - save all recording segments for events regardless of activity
- # motion - save all recordings segments for events with any detected motion
- # active_objects - save all recording segments for event with active/moving objects
- #
- # NOTE: If the retain mode for the camera is more restrictive than the mode configured
- # here, the segments will already be gone by the time this mode is applied.
- # For example, if the camera retain mode is "motion", the segments without motion are
- # never stored, so setting the mode to "all" here won't bring them back.
- mode: motion
- # Optional: Per object retention days
- objects:
- person: 2
- cup: 3
-```
-
-**STEP 5:** Start frigate docker container
-
-```bash
-1 cd ~/Documents/frigate
-2 sudo docker-compose -f frigate.yml up
-```
-
-To trouble shooting, you could spot errors by print out the docker log:
-
-``` bash
-sudo docker logs frigate
-```
-
-**STEP 6:** View the frigate web front-end
-
-Find the ip address of your [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) server by type in following command in terminal:
-
-```bash
-1 ip a
-```
-
-you should see similar output printed in the the terminal, you can find the valid ip address according to your connection setup:
-
-
-
-once you have locate your [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) ip address, please open your favorite web browser and type in the **ip-address:5000** in the address bar. In my case, the ip address is 192.168.8.57, therefore the url I put into the web browser address bar is 192.168.8.57:5000, you should land into the similar home page as the image below:
-
-
-
-To observe the live detection please click on the video feed and click Debug on the top right corner of the main view, then click SHOW OPTIONS button under the live feed, then check the Bonding Box or any other options you like to see on the live feed.
-
-
-
-**Have fun to explore more options on Frigate with [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products), feel free the checkout other SBC option such as, the [reComputer](https://www.seeedstudio.com/catalogsearch/result/?q=recomputer) series to add Edge AI to your applications.**
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+*frigate show case image from [frigate official site](https://frigate.video/)
+
+>"Frigate is an open source NVR built around real-time AI object detection. All processing is performed locally on your own hardware, and your camera feeds never leave your home." -- [Frigate NVR](https://frigate.video/)
+
+Frigate NVR is one of the most popular network video recorder project which adds local processed AI function to your security cameras, therefore not only you won't be charged with ridiculously amount of money for the cloud inference server, but also your valuable private camera stream date won't need to exposed to the wild internet. Frigate can process 100+ object detections per second with a single Google Coral TPU on board, you could customize the detect zones and masks to met your use case, it can also be integrated into Home Assistant and other automation platforms with minimum amount of setup effort to provide more security features and integrate Edge AI solutions to your valuable property.
+
+## Prerequisites
+
+- 1 x [Odyssey Blue: Quad Core Celeron J4125 Mini PC with 128GB external SSD](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products)
+- 1 x [Coral USB Accelerator](https://www.seeedstudio.com/coral-usb-accelerator-p-2899.html?queryID=8e8780bcccd9a9418d210fa8827db40f&objectID=2899&indexName=bazaar_retailer_products) (optional)
+- RTSP camera(s) stream
+- Keyboard and HDMI display
+
+Make sure [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) is connected to the same network or have access to your RTSP web camera.
+
+## Getting started
+
+In this guide, we will show you how to config Frigate docker environment to preform local AI detection on the RTSP camera stream on Seeed Studio [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) with [Coral USB Accelerator](https://www.seeedstudio.com/coral-usb-accelerator-p-2899.html?queryID=8e8780bcccd9a9418d210fa8827db40f&objectID=2899&indexName=bazaar_retailer_products), for home assistant add-on setup, please stay turned!!
+
+ **STEP 1:** Make sure you have installed Debian 11 on [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products)
+
+Please go a head download [Debian 11](https://cdimage.debian.org/debian-cd/current/amd64/iso-dvd/debian-11.4.0-amd64-DVD-1.iso) OS image and follow [this](https://wiki.seeedstudio.com/ODYSSEY-X86J4105-Installing-OS/) setup guide to install Debian 11 Operating System on [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products).
+
+**STEP 2:** Make sure you have installed Docker Engine and Docker Compose on Debian 11
+
+Please follow the [Install Docker Engine on Debian](https://docs.docker.com/engine/install/debian/#install-using-the-repository) guide to install Docker Engine and Docker Compose.
+
+To check if you have successfully installed Docker:
+
+Please open the terminal app and type in following command:
+
+```bash
+docker -v
+```
+
+you should see following output printed in the terminal:
+
+
+
+**STEP 3:** Create frigate Docker file
+
+Type in following command in terminal app to create frigate docker file with vi text-editor:
+
+```bash
+1 mkdir ~/Documents/frigate
+2 cd ~/Documents/frigate
+3 vi frigate.yml
+```
+
+Insert following lines in the frigate.yml file for frigate docker-compose setup, and replace the necessary part according to your enviroment setup.
+
+```bash
+version: "3.9"
+services:
+ frigate:
+ container_name: frigate
+ privileged: true # this may not be necessary for all setups
+ restart: unless-stopped
+ image: blakeblackshear/frigate:stable-amd64
+ shm_size: "64mb" # update for your cameras based on calculation above
+ devices:
+ - /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
+ - /dev/apex_0:/dev/apex_0 # passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
+ - /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
+ volumes:
+ - /etc/localtime:/etc/localtime:ro
+ - /path/to/your/config.yml:/config/config.yml:ro
+ - /path/to/your/storage:/media/frigate
+ - type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
+ target: /tmp/cache
+ tmpfs:
+ size: 1000000000
+ ports:
+ - "5000:5000"
+ - "1935:1935" # RTMP feeds
+ environment:
+ FRIGATE_RTSP_PASSWORD: "password"
+```
+
+For more details on the frigate docker-compose yaml setup options, please to go to the [frigate documentation page](https://docs.frigate.video/installation#docker)
+
+In my case, my frigate.yml looks like this:
+
+```bash
+version: "3.7"
+services:
+ frigate:
+ container_name: frigate
+ privileged: true # this may not be necessary for all setups
+ restart: unless-stopped
+ image: blakeblackshear/frigate:stable-amd64
+ shm_size: "64mb" # update for your cameras based on calculation above
+ devices:
+ - /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
+ - /dev/apex_0:/dev/apex_0 # passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
+ - /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
+ volumes:
+ - /etc/localtime:/etc/localtime:ro
+ - /home/seeed/Documents/frigate/config/config.yml:/config/config.yml:ro
+ - /home/seeed/Documents/frigate:/media/frigate
+ - type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
+ target: /tmp/cache
+ tmpfs:
+ size: 1000000000
+ ports:
+ - "5000:5000"
+ - "1935:1935" # RTMP feeds
+ environment:
+ FRIGATE_RTSP_PASSWORD: "password"
+```
+
+**STEP 4:** Create frigate config file
+
+Type following command in terminal app to create a config folder:
+
+```bash
+1 cd ~/Documents/frigate
+2 mkdir config/
+3 cd config/
+```
+
+Type following command to create frigate config file with vi text-editor:
+
+```bash
+1 vi config.yml
+```
+
+Then copy following lines to for the minimum configuration setup to get frigate running:
+
+```bash
+mqtt:
+ host: mqtt.server.com #Please replace with a valid mqtt broker
+cameras:
+ back:
+ ffmpeg:
+ inputs:
+ - path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2 #replace with your RTSP camera url
+ roles:
+ - detect
+ - rtmp
+ detect:
+ width: 1280
+ height: 720
+```
+
+Please to go to the frigate documentation page [configuration](https://docs.frigate.video/configuration/index) section for all the configuration options
+
+In my case, beside the following list of configs that I have customized according to my setup, all the rest config settings are kept as default:
+
+- MQTT: broker.hivemq.com
+- Detector: [Coral USB Accelerator](https://www.seeedstudio.com/coral-usb-accelerator-p-2899.html?queryID=8e8780bcccd9a9418d210fa8827db40f&objectID=2899&indexName=bazaar_retailer_products)
+- Cameras: rtsp://192.168.8.34:8080/unicast
+- Tracking object: person, cup (Note: the list of object labels can be found at frigate documentation page [Objects](https://docs.frigate.video/configuration/objects) section)
+- Record: when Person or Cup gets detected the during of the recording is 2s before detection and 2s after detection.
+
+So my config.yml looks like this:
+
+```bash
+mqtt:
+ host: broker.hivemq.com # using HiveMQ MQTT Broker for testing purpose
+detectors:
+ # Required: name of the detector
+ coral:
+ # Required: type of the detector
+ # Valid values are 'edgetpu' (requires device property below) and 'cpu'.
+ type: edgetpu
+ # Optional: device name as defined here: https://coral.ai/docs/edgetpu/multiple-edgetpu/#using-the-tensorflow-lite-python-api
+ device: usb
+# Optional: model modifications
+model:
+ # Optional: path to the model (default: automatic based on detector)
+ path: /edgetpu_model.tflite
+ # Optional: path to the labelmap (default: shown below)
+ labelmap_path: /labelmap.txt
+ # Required: Object detection model input width (default: shown below)
+ width: 320
+ # Required: Object detection model input height (default: shown below)
+ height: 320
+cameras:
+ back:
+ ffmpeg:
+ inputs:
+ - path: rtsp://192.168.8.34:8080/unicast
+ roles:
+ - detect
+ - rtmp
+# Optional: Detect configuration
+# NOTE: Can be overridden at the camera level
+detect:
+ # Optional: width of the frame for the input with the detect role (default: shown below)
+ width: 800
+ # Optional: height of the frame for the input with the detect role (default: shown below)
+ height: 600
+ # Optional: desired fps for your camera for the input with the detect role (default: shown below)
+ # NOTE: Recommended value of 5. Ideally, try and reduce your FPS on the camera.
+ fps: 8
+ # Optional: enables detection for the camera (default: True)
+ # This value can be set via MQTT and will be updated in startup based on retained value
+ enabled: True
+ # Optional: Number of frames without a detection before frigate considers an object to be gone. (default: 5x the frame rate)
+ max_disappeared: 25
+ # Optional: Configuration for stationary object tracking
+ stationary:
+ # Optional: Frequency for confirming stationary objects (default: shown below)
+ # When set to 0, object detection will not confirm stationary objects until movement is detected.
+ # If set to 10, object detection will run to confirm the object still exists on every 10th frame.
+ interval: 0
+ # Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
+ threshold: 50
+ # Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
+ # This can help with false positives for objects that should only be stationary for a limited amount of time.
+ # It can also be used to disable stationary object tracking. For example, you may want to set a value for person, but leave
+ # car at the default.
+ # WARNING: Setting these values overrides default behavior and disables stationary object tracking.
+ # There are very few situations where you would want it disabled. It is NOT recommended to
+ # copy these values from the example config into your config unless you know they are needed.
+ max_frames:
+ # Optional: Default for all object types (default: not set, track forever)
+ default: 3000
+ # Optional: Object specific values
+ objects:
+ person: 1000
+# Optional: Object configuration
+# NOTE: Can be overridden at the camera level
+objects:
+ # Optional: list of objects to track from labelmap.txt (default: shown below)
+ track:
+ - person
+ - cup
+# Optional: Record configuration
+# NOTE: Can be overridden at the camera level
+record:
+ # Optional: Enable recording (default: shown below)
+ # WARNING: If recording is disabled in the config, turning it on via
+ # the UI or MQTT later will have no effect.
+ # WARNING: Frigate does not currently support limiting recordings based
+ # on available disk space automatically. If using recordings,
+ # you must specify retention settings for a number of days that
+ # will fit within the available disk space of your drive or Frigate
+ # will crash.
+ enabled: True
+ # Optional: Number of minutes to wait between cleanup runs (default: shown below)
+ # This can be used to reduce the frequency of deleting recording segments from disk if you want to minimize i/o
+ expire_interval: 60
+ # Optional: Retention settings for recording
+ retain:
+ # Optional: Number of days to retain recordings regardless of events (default: shown below)
+ # NOTE: This should be set to 0 and retention should be defined in events section below
+ # if you only want to retain recordings of events.
+ days: 0
+ # Optional: Mode for retention. Available options are: all, motion, and active_objects
+ # all - save all recording segments regardless of activity
+ # motion - save all recordings segments with any detected motion
+ # active_objects - save all recording segments with active/moving objects
+ # NOTE: this mode only applies when the days setting above is greater than 0
+ mode: all
+ # Optional: Event recording settings
+ events:
+ # Optional: Maximum length of time to retain video during long events. (default: shown below)
+ # NOTE: If an object is being tracked for longer than this amount of time, the retained recordings
+ # will be the last x seconds of the event unless retain->days under record is > 0.
+ max_seconds: 300
+ # Optional: Number of seconds before the event to include (default: shown below)
+ pre_capture: 2
+ # Optional: Number of seconds after the event to include (default: shown below)
+ post_capture: 2
+ # Optional: Objects to save recordings for. (default: all tracked objects)
+ objects:
+ - person
+ - cup
+ # Optional: Restrict recordings to objects that entered any of the listed zones (default: no required zones)
+ required_zones: []
+ # Optional: Retention settings for recordings of events
+ retain:
+ # Required: Default retention days (default: shown below)
+ default: 10
+ # Optional: Mode for retention. (default: shown below)
+ # all - save all recording segments for events regardless of activity
+ # motion - save all recordings segments for events with any detected motion
+ # active_objects - save all recording segments for event with active/moving objects
+ #
+ # NOTE: If the retain mode for the camera is more restrictive than the mode configured
+ # here, the segments will already be gone by the time this mode is applied.
+ # For example, if the camera retain mode is "motion", the segments without motion are
+ # never stored, so setting the mode to "all" here won't bring them back.
+ mode: motion
+ # Optional: Per object retention days
+ objects:
+ person: 2
+ cup: 3
+```
+
+**STEP 5:** Start frigate docker container
+
+```bash
+1 cd ~/Documents/frigate
+2 sudo docker-compose -f frigate.yml up
+```
+
+To trouble shooting, you could spot errors by print out the docker log:
+
+``` bash
+sudo docker logs frigate
+```
+
+**STEP 6:** View the frigate web front-end
+
+Find the ip address of your [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) server by type in following command in terminal:
+
+```bash
+1 ip a
+```
+
+you should see similar output printed in the the terminal, you can find the valid ip address according to your connection setup:
+
+
+
+once you have locate your [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products) ip address, please open your favorite web browser and type in the **ip-address:5000** in the address bar. In my case, the ip address is 192.168.8.57, therefore the url I put into the web browser address bar is 192.168.8.57:5000, you should land into the similar home page as the image below:
+
+
+
+To observe the live detection please click on the video feed and click Debug on the top right corner of the main view, then click SHOW OPTIONS button under the live feed, then check the Bonding Box or any other options you like to see on the live feed.
+
+
+
+**Have fun to explore more options on Frigate with [Odyssey Blue](https://www.seeedstudio.com/odyssey-blue-j4125-128gb-p-4921.html?queryID=e375797339bbfbdd78f5c9f94af936ee&objectID=4921&indexName=bazaar_retailer_products), feel free the checkout other SBC option such as, the [reComputer](https://www.seeedstudio.com/catalogsearch/result/?q=recomputer) series to add Edge AI to your applications.**
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-Intel-OpenVINO.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-Intel-OpenVINO.md
index 3cb665a13b0ab..a6170acb05699 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-Intel-OpenVINO.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-Intel-OpenVINO.md
@@ -1,271 +1,270 @@
----
-description: ODYSSEY - X86J4105
-title: Intel OpenVINO Toolkit
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-Intel-OpenVINO
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-# Installing Intel® Distribution of OpenVINO™ toolkit for ODYSSEY - X86J4105
-
-
-
-The **Intel® Distribution of OpenVINO™ toolkit** quickly deploys applications and solutions that emulate human vision. Based on Convolutional Neural Networks (CNN), the toolkit extends computer vision (CV) workloads across Intel® hardware, maximizing performance. The Intel® Distribution of OpenVINO™ toolkit includes the Intel® Deep Learning Deployment Toolkit (Intel® DLDT).
-
-For more information, please visit [Intel® Distribution of OpenVINO™ toolkit](https://docs.openvinotoolkit.org/).
-
-**Note:** According to the official document, OpenVINO™ toolkit can be installed on different Operating systems. **For this tutorial, Ubuntu 18.04.4 LTS is installed on ODYSSEY - X86J4105 and will install OpenVINO™ toolkit on Linux.** It is strongly recommended to install this version of Ubuntu to avoid environment error that may occur.
-
-This tutorial is modified from the official [Install Intel® Distribution of OpenVINO™ toolkit for Linux*](https://docs.openvinotoolkit.org/latest/_docs_install_guides_installing_openvino_linux.html).
-
-## Hardware Requirements
-
-- A Working Computer
-
-- A Monitor
-
-- Keyboard and Mouse
-
-- Internet Connection
-
-## Install the Ubuntu OS
-
-If you have not installed Ubuntu yet, please feel free to follow [this tutorial](https://wiki.seeedstudio.com/ODYSSEY-X86J4105-Installing-OS/) to install Ubuntu into your ODYSSEY - X86J4105.
-
-## Install the Intel® Distribution of OpenVINO™ Toolkit
-
-Download the Intel® Distribution of OpenVINO™ toolkit package file from Intel® [Distribution of OpenVINO™ toolkit for Linux*](https://software.intel.com/en-us/openvino-toolkit/choose-download?elq_cid=6204639&erpm_id=9318801). Select the Intel® Distribution of OpenVINO™ toolkit for Linux package from the dropdown menu.
-
-1. Open the Terminal in Ubuntu.
-
-2. Change the directories to where you downloaded the Intel Distribution of OpenVINO toolkit for Linux* package file. if downloaded to the files to the current user's `Downloads` directory:
-
-```sh
-cd ~/Download/
-```
-
-By default, the file is saved as `l_openvino_toolkit_p_.tgz`
-
-3. Unpack the `.tgz` file:
-
-```sh
-tar -xvzf l_openvino_toolkit_p_.tgz
-```
-
-The files are unpacked to the `l_openvino_toolkit_p_` folder.
-
-4. Go to the `l_openvino_toolkit_p_` directory:
-
-```sh
-cd l_openvino_toolkit_p_
-```
-
-5. Install the Intel® Distribution of OpenVINO™ Toolkit by running the following script:
-
-```sh
-sudo ./install_GUI.sh
-```
-
-**Note:** This the the GUI installation Wizard, there is also the command-line instructions:`sudo ./install.sh`, but it is strongly recommended to use the GUI installation to avoid errors.
-
-6. Follow the instructions on the screen.
-
-
-
-7. If you select the default options, the Installation summary GUI screen will look like this:
-
-
-
-- **Note:** Can also customize to change the installation directory or components you want to install:
-
-
-
-When installed as **root** the default installation directory for the Intel Distribution of OpenVINO is `/opt/intel/openvino/`.
-
-8. A complete screen will appear when the core components have been installed:
-
-
-
-## Install External Software Dependencies
-
-These dependencies are reuqired for:
-
-- Intel-optimized build of OpenCV library
-
-- Deep Learning Inference Engine
-
-- Deep Learning Model Optimizer tools
-
-1. Change to the `install_dependencies` directory:
-
-```sh
-cd /opt/intel/openvino/install_dependencies
-```
-
-2. Run the script to download and install the external software dependencies:
-
-```sh
-sudo -E ./install_openvino_dependencies.sh
-```
-
-
-
-This is dependent on the internet speed, please be patient. The external software dependencies are installed!
-
-## Set the Environment Variables
-
-You must update several environment variables before you can compile and run OpenVINO™ applications. Run the following script to temporarily set your environment variables:
-
-```sh
-source /opt/intel/openvino/bin/setupvars.sh
-```
-
-**Note:** The OpenVINO environment variables are removed when you close the shell. As an option, you can permanently set the environment variables as follows:
-
-1. Open and `.bashrc` file in ``.
-
-```sh
-nano /home/USERNAME/.bashrc
-```
-
-Replace you user name to `USERNAME`.
-
-2. Add this line to the end of the file:
-
-```sh
-source /opt/intel/openvino/bin/setupvars.sh
-```
-
-
-
-3. Use **Ctrl + O** to save and **Ctrl + X** to exit.
-
-4. To test your change, open a new terminal. You should see `[setupvars.sh] OpenVINO environment initialized` at the top of the terminal.
-
-## Configure the Model Optimizer
-
-The Model Optimizer is a Python*-based command line tool for importing trained models from popular deep learning frameworks such as Caffe*, TensorFlow*, Apache MXNet*, ONNX*and Kaldi*.
-
-The Model Optimizer is a key component of the Intel Distribution of OpenVINO toolkit. You cannot perform inference on your trained model without running the model through the Model Optimizer. When you run a pre-trained model through the Model Optimizer, your output is an Intermediate Representation (IR) of the network. The Intermediate Representation is a pair of files that describe the whole model:
-
-- `.xml`: Describes the network topology
-
-- `.bin`: Contains the weights and biases binary data
-
-For more information about the Model Optimizer, refer to the [Model Optimizer Developer Guide](https://docs.openvinotoolkit.org/latest/_docs_MO_DG_Deep_Learning_Model_Optimizer_DevGuide.html).
-
-### Model Optimizer Configuration Steps
-
-You can choose to either configure all supported frameworks at once **OR** configure one framework at a time. Choose the option that best suits your needs. If you see error messages, make sure you installed all dependencies.
-
-**OPTION 1: Configure all supported frameworks at the same time**
-
-1. Go to the Model Optimizer prerequisites directory:
-
-```sh
-cd /opt/intel/openvino/deployment_tools/model_optimizer/install_prerequisites
-```
-
-2. Run the script to configure the Model Optimizer for Caffe, TensorFlow, MXNet, Kaldi*, and ONNX:
-
-```sh
-sudo ./install_prerequisites.sh
-```
-
-**OPTION 2: Configure each framework separately**
-
-Run the script for your model framework. You can run more than one script:
-
-- For **Caffe**:
-
-```
-sudo ./install_prerequisites_caffe.sh
-```
-
-- For **TensorFlow**:
-
-```
-sudo ./install_prerequisites_tf.sh
-```
-
-- For **MXNet**:
-
-```
-sudo ./install_prerequisites_mxnet.sh
-```
-
-- For **ONNX**:
-
-```
-sudo ./install_prerequisites_onnx.sh
-```
-
-- For **Kaldi**:
-
-```
-sudo ./install_prerequisites_kaldi.sh
-```
-
-Now you are ready to compile and run the samples!
-
-## Run the Verification Script to Verify Installation
-
-**To verify the installation and compile two samples on the ODYSSEY - X86J4105's CPU:**
-
-1. Go to the Inference Engine demo directory:
-
-```sh
-cd /opt/intel/openvino/deployment_tools/demo
-```
-
-2. Run the **Image Classification verification script:**
-
-```sh
-./demo_squeezenet_download_convert_run.sh
-```
-
-This verification script downloads a SqueezeNet model, uses the Model Optimizer to convert the model to the .bin and .xml Intermediate Representation (IR) files. The Inference Engine requires this model conversion so it can use the IR as input and achieve optimum performance on Intel hardware.
-
-This verification script builds the [Image Classification Sample Async application](https://docs.openvinotoolkit.org/latest/_inference_engine_samples_classification_sample_async_README.html) and run it with the `car.png` image located in the demo directory. When the verification script completes, you will have the label and confidence for the top-10 categories:
-
-
-
-Run the **Inference Pipeline verification script:**
-
-```sh
-./demo_security_barrier_camera.sh
-```
-
-
-
-This script downloads three pre-trained model IRs, builds the [Security Barrier Camera Demo](https://docs.openvinotoolkit.org/latest/_demos_security_barrier_camera_demo_README.html) application, and runs it with the downloaded models and the car_1.bmp image from the demo directory to show an inference pipeline. The verification script uses vehicle recognition in which vehicle attributes build on each other to narrow in on a specific attribute.
-
-To learn about the verification scripts, see the **README.txt** file in `/opt/intel/openvino/deployment_tools/demo`.
-
-For a description of the Intel Distribution of OpenVINO™ pre-trained object detection and object recognition models, see [Overview of OpenVINO™ Toolkit Pre-Trained Models](https://docs.openvinotoolkit.org/latest/_models_intel_index.html).
-
-You have completed all required installation, configuration and build steps in this guide to use your CPU to work with your trained models, feel free to explore the powerful Intel OpenVINO tool to train your models with ODYSSEY - X86J4105!
-
-## Resources
-
-- [Intel® Distribution of OpenVINO™ toolkit](https://docs.openvinotoolkit.org/)
-
-- [Install Intel® Distribution of OpenVINO™ toolkit for Linux*](https://docs.openvinotoolkit.org/latest/_docs_install_guides_installing_openvino_linux.html)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J4105
+title: Intel OpenVINO Toolkit
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-Intel-OpenVINO
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+# Installing Intel® Distribution of OpenVINO™ toolkit for ODYSSEY - X86J4105
+
+
+
+The **Intel® Distribution of OpenVINO™ toolkit** quickly deploys applications and solutions that emulate human vision. Based on Convolutional Neural Networks (CNN), the toolkit extends computer vision (CV) workloads across Intel® hardware, maximizing performance. The Intel® Distribution of OpenVINO™ toolkit includes the Intel® Deep Learning Deployment Toolkit (Intel® DLDT).
+
+For more information, please visit [Intel® Distribution of OpenVINO™ toolkit](https://docs.openvinotoolkit.org/).
+
+**Note:** According to the official document, OpenVINO™ toolkit can be installed on different Operating systems. **For this tutorial, Ubuntu 18.04.4 LTS is installed on ODYSSEY - X86J4105 and will install OpenVINO™ toolkit on Linux.** It is strongly recommended to install this version of Ubuntu to avoid environment error that may occur.
+
+This tutorial is modified from the official [Install Intel® Distribution of OpenVINO™ toolkit for Linux*](https://docs.openvinotoolkit.org/latest/_docs_install_guides_installing_openvino_linux.html).
+
+## Hardware Requirements
+
+- A Working Computer
+
+- A Monitor
+
+- Keyboard and Mouse
+
+- Internet Connection
+
+## Install the Ubuntu OS
+
+If you have not installed Ubuntu yet, please feel free to follow [this tutorial](https://wiki.seeedstudio.com/ODYSSEY-X86J4105-Installing-OS/) to install Ubuntu into your ODYSSEY - X86J4105.
+
+## Install the Intel® Distribution of OpenVINO™ Toolkit
+
+Download the Intel® Distribution of OpenVINO™ toolkit package file from Intel® [Distribution of OpenVINO™ toolkit for Linux*](https://software.intel.com/en-us/openvino-toolkit/choose-download?elq_cid=6204639&erpm_id=9318801). Select the Intel® Distribution of OpenVINO™ toolkit for Linux package from the dropdown menu.
+
+1. Open the Terminal in Ubuntu.
+
+2. Change the directories to where you downloaded the Intel Distribution of OpenVINO toolkit for Linux* package file. if downloaded to the files to the current user's `Downloads` directory:
+
+```sh
+cd ~/Download/
+```
+
+By default, the file is saved as `l_openvino_toolkit_p_.tgz`
+
+3. Unpack the `.tgz` file:
+
+```sh
+tar -xvzf l_openvino_toolkit_p_.tgz
+```
+
+The files are unpacked to the `l_openvino_toolkit_p_` folder.
+
+4. Go to the `l_openvino_toolkit_p_` directory:
+
+```sh
+cd l_openvino_toolkit_p_
+```
+
+5. Install the Intel® Distribution of OpenVINO™ Toolkit by running the following script:
+
+```sh
+sudo ./install_GUI.sh
+```
+
+**Note:** This the the GUI installation Wizard, there is also the command-line instructions:`sudo ./install.sh`, but it is strongly recommended to use the GUI installation to avoid errors.
+
+6. Follow the instructions on the screen.
+
+
+
+7. If you select the default options, the Installation summary GUI screen will look like this:
+
+
+
+- **Note:** Can also customize to change the installation directory or components you want to install:
+
+
+
+When installed as **root** the default installation directory for the Intel Distribution of OpenVINO is `/opt/intel/openvino/`.
+
+8. A complete screen will appear when the core components have been installed:
+
+
+
+## Install External Software Dependencies
+
+These dependencies are reuqired for:
+
+- Intel-optimized build of OpenCV library
+
+- Deep Learning Inference Engine
+
+- Deep Learning Model Optimizer tools
+
+1. Change to the `install_dependencies` directory:
+
+```sh
+cd /opt/intel/openvino/install_dependencies
+```
+
+2. Run the script to download and install the external software dependencies:
+
+```sh
+sudo -E ./install_openvino_dependencies.sh
+```
+
+
+
+This is dependent on the internet speed, please be patient. The external software dependencies are installed!
+
+## Set the Environment Variables
+
+You must update several environment variables before you can compile and run OpenVINO™ applications. Run the following script to temporarily set your environment variables:
+
+```sh
+source /opt/intel/openvino/bin/setupvars.sh
+```
+
+**Note:** The OpenVINO environment variables are removed when you close the shell. As an option, you can permanently set the environment variables as follows:
+
+1. Open and `.bashrc` file in ``.
+
+```sh
+nano /home/USERNAME/.bashrc
+```
+
+Replace you user name to `USERNAME`.
+
+2. Add this line to the end of the file:
+
+```sh
+source /opt/intel/openvino/bin/setupvars.sh
+```
+
+
+
+3. Use **Ctrl + O** to save and **Ctrl + X** to exit.
+
+4. To test your change, open a new terminal. You should see `[setupvars.sh] OpenVINO environment initialized` at the top of the terminal.
+
+## Configure the Model Optimizer
+
+The Model Optimizer is a Python*-based command line tool for importing trained models from popular deep learning frameworks such as Caffe*, TensorFlow*, Apache MXNet*, ONNX*and Kaldi*.
+
+The Model Optimizer is a key component of the Intel Distribution of OpenVINO toolkit. You cannot perform inference on your trained model without running the model through the Model Optimizer. When you run a pre-trained model through the Model Optimizer, your output is an Intermediate Representation (IR) of the network. The Intermediate Representation is a pair of files that describe the whole model:
+
+- `.xml`: Describes the network topology
+
+- `.bin`: Contains the weights and biases binary data
+
+For more information about the Model Optimizer, refer to the [Model Optimizer Developer Guide](https://docs.openvinotoolkit.org/latest/_docs_MO_DG_Deep_Learning_Model_Optimizer_DevGuide.html).
+
+### Model Optimizer Configuration Steps
+
+You can choose to either configure all supported frameworks at once **OR** configure one framework at a time. Choose the option that best suits your needs. If you see error messages, make sure you installed all dependencies.
+
+**OPTION 1: Configure all supported frameworks at the same time**
+
+1. Go to the Model Optimizer prerequisites directory:
+
+```sh
+cd /opt/intel/openvino/deployment_tools/model_optimizer/install_prerequisites
+```
+
+2. Run the script to configure the Model Optimizer for Caffe, TensorFlow, MXNet, Kaldi*, and ONNX:
+
+```sh
+sudo ./install_prerequisites.sh
+```
+
+**OPTION 2: Configure each framework separately**
+
+Run the script for your model framework. You can run more than one script:
+
+- For **Caffe**:
+
+```
+sudo ./install_prerequisites_caffe.sh
+```
+
+- For **TensorFlow**:
+
+```
+sudo ./install_prerequisites_tf.sh
+```
+
+- For **MXNet**:
+
+```
+sudo ./install_prerequisites_mxnet.sh
+```
+
+- For **ONNX**:
+
+```
+sudo ./install_prerequisites_onnx.sh
+```
+
+- For **Kaldi**:
+
+```
+sudo ./install_prerequisites_kaldi.sh
+```
+
+Now you are ready to compile and run the samples!
+
+## Run the Verification Script to Verify Installation
+
+**To verify the installation and compile two samples on the ODYSSEY - X86J4105's CPU:**
+
+1. Go to the Inference Engine demo directory:
+
+```sh
+cd /opt/intel/openvino/deployment_tools/demo
+```
+
+2. Run the **Image Classification verification script:**
+
+```sh
+./demo_squeezenet_download_convert_run.sh
+```
+
+This verification script downloads a SqueezeNet model, uses the Model Optimizer to convert the model to the .bin and .xml Intermediate Representation (IR) files. The Inference Engine requires this model conversion so it can use the IR as input and achieve optimum performance on Intel hardware.
+
+This verification script builds the [Image Classification Sample Async application](https://docs.openvinotoolkit.org/latest/_inference_engine_samples_classification_sample_async_README.html) and run it with the `car.png` image located in the demo directory. When the verification script completes, you will have the label and confidence for the top-10 categories:
+
+
+
+Run the **Inference Pipeline verification script:**
+
+```sh
+./demo_security_barrier_camera.sh
+```
+
+
+
+This script downloads three pre-trained model IRs, builds the [Security Barrier Camera Demo](https://docs.openvinotoolkit.org/latest/_demos_security_barrier_camera_demo_README.html) application, and runs it with the downloaded models and the car_1.bmp image from the demo directory to show an inference pipeline. The verification script uses vehicle recognition in which vehicle attributes build on each other to narrow in on a specific attribute.
+
+To learn about the verification scripts, see the **README.txt** file in `/opt/intel/openvino/deployment_tools/demo`.
+
+For a description of the Intel Distribution of OpenVINO™ pre-trained object detection and object recognition models, see [Overview of OpenVINO™ Toolkit Pre-Trained Models](https://docs.openvinotoolkit.org/latest/_models_intel_index.html).
+
+You have completed all required installation, configuration and build steps in this guide to use your CPU to work with your trained models, feel free to explore the powerful Intel OpenVINO tool to train your models with ODYSSEY - X86J4105!
+
+## Resources
+
+- [Intel® Distribution of OpenVINO™ toolkit](https://docs.openvinotoolkit.org/)
+
+- [Install Intel® Distribution of OpenVINO™ toolkit for Linux*](https://docs.openvinotoolkit.org/latest/_docs_install_guides_installing_openvino_linux.html)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-NCS2.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-NCS2.md
index cd2ba4d20ec82..73176f1ea0647 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-NCS2.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Computer_Version/ODYSSEY-X86J4105-NCS2.md
@@ -1,134 +1,133 @@
----
-description: ODYSSEY - X86J41x5
-title: Intel Neural Compute Stick 2
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-NCS2
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-# Get Started with Intel® Neural Compute Stick 2 with ODYSSEY - X86J41x5
-
-
-
-The **Intel Neural Compute Stick 2 (NCS2)** is a USB stick which offers you access to neural network functionality, without the need for large, expensive hardware. It contains a **Intel Movidius Myriad X Vision Processing Unit (VPU)** to enable you to incorporate computer vision and artificial intelligence (AI) to your IoT and edge devices.
-
-## Set up Software Environment
-
-To use the Intel NCS2, please first complete the [Installing Intel® Distribution of OpenVINO™ toolkit for ODYSSEY - X86J41x5](/ODYSSEY-X86J4105-NCS2) and configure all the dependent software environment.
-
-
-If you have already completed the tutorial, please follow the below instructions.
-
-## Configure the Intel® Neural Compute Stick 2
-
-1. Add the current Linux user to the users group:
-
-```sh
-sudo usermod -a -G users "$(whoami)"
-```
-
-Log out and log in for it to take effect.
-
-1. To perform inference on **Intel® Neural Compute Stick 2**, install the USB rules as follows:
-
-```sh
-sudo cp /opt/intel/openvino/inference_engine/external/97-myriad-usbboot.rules /etc/udev/rules.d/
-```
-
-```sh
-sudo udevadm control --reload-rules
-```
-
-```sh
-sudo udevadm trigger
-```
-
-```sh
-sudo ldconfig
-```
-
-**Note:** Reboot the device for this to take effect.
-
-## Run the Samples Using NCS2's VPU
-
-1. Go to the Inference Engine demo directory:
-
-```sh
-cd /opt/intel/openvino/deployment_tools/demo
-```
-
-2. Run the **Image Classification verification script with NSC2:**
-
-```sh
-./demo_squeezenet_download_convert_run.sh –d MYRIAD
-```
-
-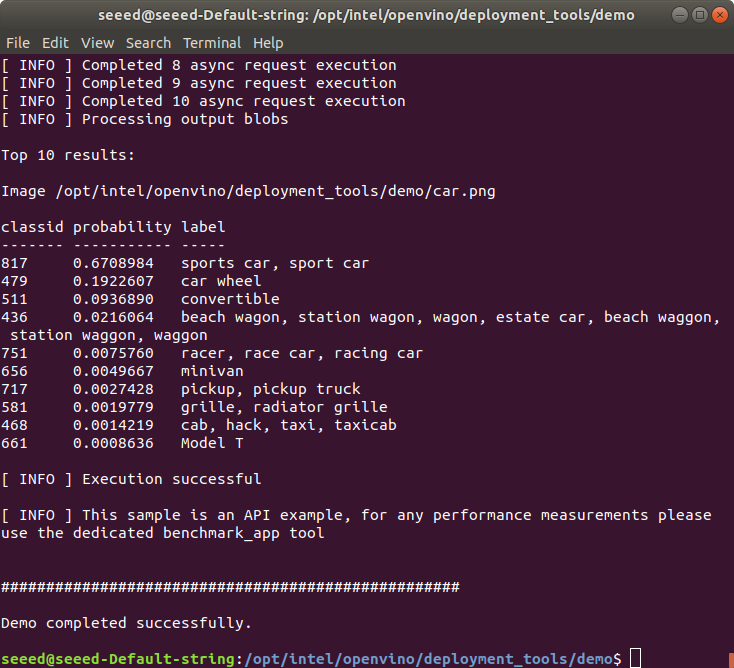
-
-3. Run the **Inference Pipeline verification script with NSC2:**
-
-```sh
-./demo_security_barrier_camera.sh –d MYRIAD
-```
-
-
-
-Look for results like this which indicate successful installation!
-
-## Next Step: The [Ncappzoo](http://www.github.com/movidius/ncappzoo)
-
-The [ncappzoo](http://www.github.com/movidius/ncappzoo) at [http://www.github.com/movidius/ncappzoo](http://www.github.com/movidius/ncappzoo) is an open source github repository that contains numerous examples with a simple layout and easy to use Makefiles. This repository is tailored for the Intel® NCS 2 developer community and helps developers get started quickly by focusing on application code that use pretrained neural networks.
-
-1. Clone the github repo to the local files with rhe following command:
-
-```sh
-git clone https://github.com/movidius/ncappzoo.git
-```
-
-2. Run this command inside of any **app/network** folder to check your system software dependencies for that particular sample:
-
-```sh
-make install_reqs
-```
-
-3. Run the sample:
-
-```sh
-make run
-```
-
-## Example run
-
-There are many examples that can be run, here used the `benchmark` demo for example:
-
-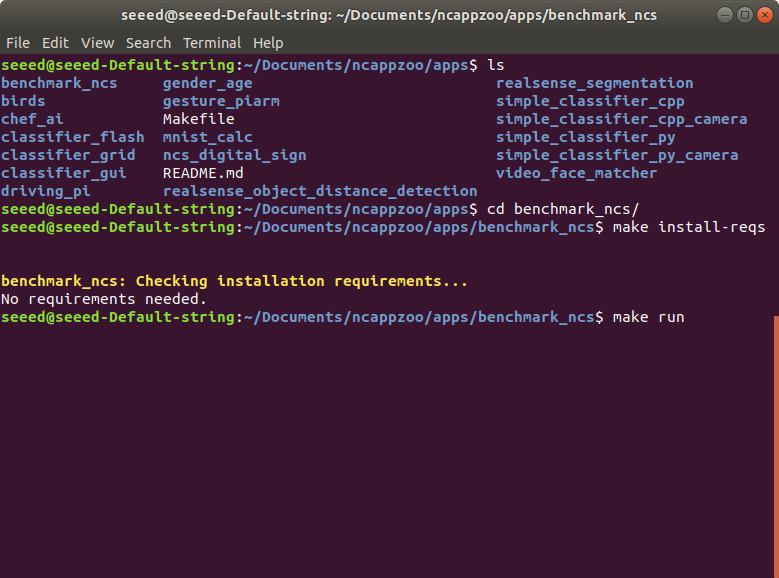
-
-
-
-### Running the `birds` example
-
-
-
-## Resources
-
-- [Intel® Distribution of OpenVINO™ toolkit](https://docs.openvinotoolkit.org/)
-
-- [Ncappzoo](http://www.github.com/movidius/ncappzoo)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Intel Neural Compute Stick 2
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-NCS2
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+# Get Started with Intel® Neural Compute Stick 2 with ODYSSEY - X86J41x5
+
+
+
+The **Intel Neural Compute Stick 2 (NCS2)** is a USB stick which offers you access to neural network functionality, without the need for large, expensive hardware. It contains a **Intel Movidius Myriad X Vision Processing Unit (VPU)** to enable you to incorporate computer vision and artificial intelligence (AI) to your IoT and edge devices.
+
+## Set up Software Environment
+
+To use the Intel NCS2, please first complete the [Installing Intel® Distribution of OpenVINO™ toolkit for ODYSSEY - X86J41x5](/ODYSSEY-X86J4105-NCS2) and configure all the dependent software environment.
+
+
+If you have already completed the tutorial, please follow the below instructions.
+
+## Configure the Intel® Neural Compute Stick 2
+
+1. Add the current Linux user to the users group:
+
+```sh
+sudo usermod -a -G users "$(whoami)"
+```
+
+Log out and log in for it to take effect.
+
+1. To perform inference on **Intel® Neural Compute Stick 2**, install the USB rules as follows:
+
+```sh
+sudo cp /opt/intel/openvino/inference_engine/external/97-myriad-usbboot.rules /etc/udev/rules.d/
+```
+
+```sh
+sudo udevadm control --reload-rules
+```
+
+```sh
+sudo udevadm trigger
+```
+
+```sh
+sudo ldconfig
+```
+
+**Note:** Reboot the device for this to take effect.
+
+## Run the Samples Using NCS2's VPU
+
+1. Go to the Inference Engine demo directory:
+
+```sh
+cd /opt/intel/openvino/deployment_tools/demo
+```
+
+2. Run the **Image Classification verification script with NSC2:**
+
+```sh
+./demo_squeezenet_download_convert_run.sh –d MYRIAD
+```
+
+
+
+3. Run the **Inference Pipeline verification script with NSC2:**
+
+```sh
+./demo_security_barrier_camera.sh –d MYRIAD
+```
+
+
+
+Look for results like this which indicate successful installation!
+
+## Next Step: The [Ncappzoo](http://www.github.com/movidius/ncappzoo)
+
+The [ncappzoo](http://www.github.com/movidius/ncappzoo) at [http://www.github.com/movidius/ncappzoo](http://www.github.com/movidius/ncappzoo) is an open source github repository that contains numerous examples with a simple layout and easy to use Makefiles. This repository is tailored for the Intel® NCS 2 developer community and helps developers get started quickly by focusing on application code that use pretrained neural networks.
+
+1. Clone the github repo to the local files with rhe following command:
+
+```sh
+git clone https://github.com/movidius/ncappzoo.git
+```
+
+2. Run this command inside of any **app/network** folder to check your system software dependencies for that particular sample:
+
+```sh
+make install_reqs
+```
+
+3. Run the sample:
+
+```sh
+make run
+```
+
+## Example run
+
+There are many examples that can be run, here used the `benchmark` demo for example:
+
+
+
+
+
+### Running the `birds` example
+
+
+
+## Resources
+
+- [Intel® Distribution of OpenVINO™ toolkit](https://docs.openvinotoolkit.org/)
+
+- [Ncappzoo](http://www.github.com/movidius/ncappzoo)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Home-Assistant_for_ODYSSEY/ODYSSEY-X86-Home-Assistant.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Home-Assistant_for_ODYSSEY/ODYSSEY-X86-Home-Assistant.md
index a8fcd5e01e539..d4dd72d300d4b 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Home-Assistant_for_ODYSSEY/ODYSSEY-X86-Home-Assistant.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Application/Home-Assistant_for_ODYSSEY/ODYSSEY-X86-Home-Assistant.md
@@ -1,300 +1,299 @@
----
-description: Getting Started with Home Assistant on ODYSSEY-X86
-title: Getting Started with Home Assistant
-tags:
- - Home Assistant
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86-Home-Assistant
-sku: E22011026
-last_update:
- date: 03/16/2023
- author: Lakshantha
-
----
-# Getting Started with Home Assistant on ODYSSEY-X86
-
-
-
-## Introduction
-
-This wiki will walkthrough step-by-step on how you can turn your ordinary house into a smart one just by using an [ODYSSEY-X86](https://www.seeedstudio.com/ODYSSEY-X86J4125800-p-4915.html)! By the end of this wiki, you will be able to view a beautiful dashboard on your PC, tablet, smartphone, reTerminal and be able to control your home appliances and view other information such as sensor data right at your fingertips. So, let's get started!
-
-## What is Home Assistant?
-
-[Home Assistant](https://www.home-assistant.io) is a free and open-source software for home automation designed to be a central control system for smart home devices, which can be referred to as a smart home hub. It offers you home automation without needing the cloud, which means your home automation system is not dependent on remote servers or an internet connection. This local control means, you can have far better security than cloud connected devices. Also, it offers greater reliability when it comes to keep it running 24x7.
-
-
-
-It is flexible to use and very easy to get started even for beginners with the great documentation offered by Home Assistant. Also, there is an active community on [Home Assistant Forum](https://community.home-assistant.io) with many members who will be there to help you if you come across any issues when building and running Home Assistant.
-
-After setting up Home Assistant, it can be accessed through a web-based user interface by using companion apps for Android and iOS, or by voice commands via a supported virtual assistant such as Google Assistant or Amazon Alexa.
-
-If you want to quickly experience a demo on your web browser, please [click here](https://demo.home-assistant.io).
-
-
-
-## Different installation methods
-
-Home Assistant is supported to run on different hardware such as a Raspberry Pi, ODROID, ASUS Tinkerboard, Intel NUC, Windows/ Linux/ Mac PCs. And with this, comes different methods of installation on different hardware. To learn more about all these installation methods please visit [this page](https://www.home-assistant.io/installation).
-
-As you can see below, there are 4 main types of installation methods and not all Home Assistant features are supported by all installation methods.
-
-
-
-## Installation Method for ODYSSEY - X86
-
-According to Home Assistant, the two recommended methods of Home Assistant installation are **OS and Container method**. Here we will use **OS method** because it will give access to all the features of Home Assistant.
-
-### Why not Home Assistant Container?
-
-If we install Home Assistant Container on ODYSSEY-X86, we will be missing out on several Home Assistant features. So we will skip on that installation. However, if you want to explore this installation method, you can follow [this guide](https://www.home-assistant.io/installation/generic-x86-64#install-home-assistant-container).
-
-## Let's build it
-
-Now let's go through the process of installing Home Assistant OS on ODYSSEY-X86.
-
-There are different ways to install Home Assistant OS on ODYSSEY-X86. The most simplest way would be to directly flash the Home Assistant OS image to a USB flash drive, connect the USB drive to ODYSSEY-X86 and run Home Assistant from it.
-
-The other way would be to install Home Assistant OS on a different storage device such as an external HDD, SSD, M.2 SSD and the onboard eMMC(for ODYSSEY-X86 eMMC version). This method can guarantee that you have a reliable storage device in comparison with a USB drive.
-
-We will explain how to install Home Assistant OS in both methods!
-
-### Run Home Assistant from a USB flash drive
-
-- **Step 1.** Connect a USB flash drive to your PC
-
-**Note:** It is recommended to use a flash drive with at least 16GB of storage capacity
-
-- **Step 2.** Download and install [Balena Etcher](https://www.balena.io/etcher) according to your operating system
-
-- **Step 3.** Open Balena Etcher and select **Flash from URL**
-
-
-
-- **Step 4.** Copy and paste the below URL inside the empty box and click **OK**
-
-```sh
-https://github.com/home-assistant/operating-system/releases/download/9.0/haos_generic-x86-64-9.0.img.xz
-```
-
-
-
-- **Step 5.** Once the image is downloaded, click **Select target** and select the connected USB flash drive
-
-
-
-- **Step 6.** Click **Flash** to start writing the image to the USB flash drive
-
-
-
-If the flashing process is successful, you will see the below output
-
-
-
-- **Step 7.** Connect this USB flash drive to one of the USB ports on the ODYSSEY-X86 and turn on the board
-
-- **Step 8.** Keep pressing **DELETE** key to enter BIOS
-
-
-
-- **Step 9.** Go to **Boot** tab, select **Boot Option #1** and select **UEFI: OS (USB)** and click **Yes** for the pop-up
-
-
-
-
-
-Now ODYSSEY-X86 will reboot and use the connected USB drive as the boot device. After successful booting into Home Assistant OS, you will see the below output
-
-
-
-### Run Home Assistant from external HDD/ SSD, M.2 SSD, eMMC
-
-In this method, we will first create a bootable USB drive with Ubuntu Desktop and then boot ODYSSEY-X86 from it. After that we will flash Home Assistant OS to a drive (external HDD/ SSD, M.2 SSD, onboard eMMC) while we are inside the Ubuntu system and run Home Assistant from that drive.
-
-- **Step 1.** Download the latest Ubuntu Desktop image from [here](https://ubuntu.com/download/desktop)
-
-- **Step 2.** Connect a USB flash drive to your PC
-
-**Note:** It is recommended to use a flash drive with at least 8GB of storage capacity
-
-- **Step 3.** Download and install [Balena Etcher](https://www.balena.io/etcher) according to your operating system
-
-- **Step 4.** Open Balena Etcher, select **Flash from file**
-
-
-
-- **Step 5.** Click on downloaded **.iso file** and click **Open**
-
-
-
-- **Step 6.** Click **Select target**, select the connected USB flash drive and click **Select**
-
-
-
-
-
-- **Step 7.** Click **Flash** to flash Ubuntu server to USB flash drive
-
-
-
-If the flashing process is successful, you will see the below output
-
-
-
-- **Step 8.** Connect this USB flash drive to one of the USB ports on the ODYSSEY-X86, connect a storage drive (external HDD/ SSD, M.2 SSD) and power on the board
-
-**Note:** Make sure a keyboard, mouse and a display is connected to ODYSSEY-X86
-
-- **Step 9.** Keep pressing **DELETE** key to enter BIOS
-
-
-
-- **Step 10.** Go to **Boot** tab, select **Boot Option #1** and select **UEFI: USB, Partition 2**
-
-
-
-- **Step 11.** Go to **Save & Exit** tab, click **Save Changes and Reset** and click **Yes** for the pop-up
-
-
-
-
-
-Now ODYSSEY-X86 will reboot and use the connected USB drive as the boot device.
-
-- **Step 12.** Select **Try or Install Ubuntu**
-
-
-
-- **Step 13.** Click **Try Ubuntu**
-
-
-
-After a few seconds, it will boot into Ubuntu Desktop
-
-
-
-- **Step 14.** Open a terminal window by pressing **Ctrl+Alt+T**
-
-
-
-- **Step 15.** Type the following command to download Home Assistant OS image
-
-```sh
-wget https://github.com/home-assistant/operating-system/releases/download/9.0/haos_generic-x86-64-9.0.img.xz
-```
-
-- **Step 16.** Extract the file by using the below command
-
-```sh
-unxz haos_generic-x86-64-9.0.img.xz
-```
-
-This will extract the above **.img.xz** into **.img**
-
-- **Step 17.** Type **lsblk** to list the connected storage drives. Here we have connected an HDD drive via the SATA port.
-
-
-
-As you can see, the drive which is already running Ubuntu OS (USB flash drive) is **sdb** with several partitions and mountpoints. We can also identify this drive from the **SIZE**. This means the drive **sda** is the connected HDD drive.
-
-- **Step 18.** Enter the command below to flash the Home Assistant OS image to the connected HDD drive. In this case, drive **sda**
-
-```sh
-sudo dd if=haos_generic-x86-64-9.0.img of=/dev/sda status=progress
-```
-
-Wait a few minutes until the process is completed
-
-
-
-- **Step 19.** Type the following to reboot ODYSSEY-X86
-
-```sh
-sudo reboot
-```
-
-- **Step 20.** Remove the USB flash drive and press **ENTER** when you see the below prompt
-
-
-
-- **Step 21.** Enter BIOS as explained before and change the boot drive to the connected drive
-
-
-
-Now ODYSSEY-X86 will reboot and use the connected drive as the boot device. After successful booting into Home Assistant OS, you will see the below output
-
-
-
-## View Home Assistant Dashboard UI on web browser
-
-- **Step 1.** Open a web browser on a PC, tablet, smartphone type the following URL
-
-```sh
-homeassistant.local:8123
-```
-
-It will take some time to finish the initial start up process
-
-- **Step 2.** Once finished starting up, create an account and follow through the initial set up instuctions
-
-
-
-After that you will see your welcome dashboard as follows
-
-
-
-## View Home Assistant Dashboard UI in Kiosk mode on reTerminal
-
-To be able to view the Home Assistant Dashboard UI on [reTerminal](https://www.seeedstudio.com/ReTerminal-with-CM4-p-4904.html) LCD, we will use Chromium web browser which already comes with Raspberry Pi OS. We will set up Chromium so that it will autostart on full-screen mode after reTerminal is booted up.
-
-- **Step 1.** Turn on reTerminal and make sure Raspberry Pi OS is already installed. If not, you can follow [this wiki](https://wiki.seeedstudio.com/reTerminal-FAQ/#q2-how-can-i-flash-raspberry-pi-os-which-is-originally-shipped-with-reterminal).
-
-- **Step 2.** Navigate to the following directory
-
-```sh
-cd /etc/xdg/lxsession/LXDE-pi/
-```
-
-- **Step 3.** Open **autostart** file with **nano text editor**
-
-```sh
-sudo nano autostart
-```
-
-- **Step 4.** Add the following line to the end of the file
-
-```sh
-@chromium-browser --kiosk --incognito --disable-pinch --overscroll-history-navigation=0 homeassistant.local:8123
-```
-
-- **Step 5.** Reboot reTerminal
-
-```sh
-sudo reboot
-```
-
-Now when reTerminal boots up, Home Assistant dashboard UI will open in full-screen window !
-
-## Bonus
-
-After integrating smart lights, temperature, humidity sensors, CCTV and more, a complete Smart Home dashboard on Home Assistant will look like below
-
-
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: Getting Started with Home Assistant on ODYSSEY-X86
+title: Getting Started with Home Assistant
+tags:
+ - Home Assistant
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86-Home-Assistant
+sku: E22011026
+last_update:
+ date: 03/16/2023
+ author: Lakshantha
+---
+# Getting Started with Home Assistant on ODYSSEY-X86
+
+
+
+## Introduction
+
+This wiki will walkthrough step-by-step on how you can turn your ordinary house into a smart one just by using an [ODYSSEY-X86](https://www.seeedstudio.com/ODYSSEY-X86J4125800-p-4915.html)! By the end of this wiki, you will be able to view a beautiful dashboard on your PC, tablet, smartphone, reTerminal and be able to control your home appliances and view other information such as sensor data right at your fingertips. So, let's get started!
+
+## What is Home Assistant?
+
+[Home Assistant](https://www.home-assistant.io) is a free and open-source software for home automation designed to be a central control system for smart home devices, which can be referred to as a smart home hub. It offers you home automation without needing the cloud, which means your home automation system is not dependent on remote servers or an internet connection. This local control means, you can have far better security than cloud connected devices. Also, it offers greater reliability when it comes to keep it running 24x7.
+
+
+
+It is flexible to use and very easy to get started even for beginners with the great documentation offered by Home Assistant. Also, there is an active community on [Home Assistant Forum](https://community.home-assistant.io) with many members who will be there to help you if you come across any issues when building and running Home Assistant.
+
+After setting up Home Assistant, it can be accessed through a web-based user interface by using companion apps for Android and iOS, or by voice commands via a supported virtual assistant such as Google Assistant or Amazon Alexa.
+
+If you want to quickly experience a demo on your web browser, please [click here](https://demo.home-assistant.io).
+
+
+
+## Different installation methods
+
+Home Assistant is supported to run on different hardware such as a Raspberry Pi, ODROID, ASUS Tinkerboard, Intel NUC, Windows/ Linux/ Mac PCs. And with this, comes different methods of installation on different hardware. To learn more about all these installation methods please visit [this page](https://www.home-assistant.io/installation).
+
+As you can see below, there are 4 main types of installation methods and not all Home Assistant features are supported by all installation methods.
+
+
+
+## Installation Method for ODYSSEY - X86
+
+According to Home Assistant, the two recommended methods of Home Assistant installation are **OS and Container method**. Here we will use **OS method** because it will give access to all the features of Home Assistant.
+
+### Why not Home Assistant Container?
+
+If we install Home Assistant Container on ODYSSEY-X86, we will be missing out on several Home Assistant features. So we will skip on that installation. However, if you want to explore this installation method, you can follow [this guide](https://www.home-assistant.io/installation/generic-x86-64#install-home-assistant-container).
+
+## Let's build it
+
+Now let's go through the process of installing Home Assistant OS on ODYSSEY-X86.
+
+There are different ways to install Home Assistant OS on ODYSSEY-X86. The most simplest way would be to directly flash the Home Assistant OS image to a USB flash drive, connect the USB drive to ODYSSEY-X86 and run Home Assistant from it.
+
+The other way would be to install Home Assistant OS on a different storage device such as an external HDD, SSD, M.2 SSD and the onboard eMMC(for ODYSSEY-X86 eMMC version). This method can guarantee that you have a reliable storage device in comparison with a USB drive.
+
+We will explain how to install Home Assistant OS in both methods!
+
+### Run Home Assistant from a USB flash drive
+
+- **Step 1.** Connect a USB flash drive to your PC
+
+**Note:** It is recommended to use a flash drive with at least 16GB of storage capacity
+
+- **Step 2.** Download and install [Balena Etcher](https://www.balena.io/etcher) according to your operating system
+
+- **Step 3.** Open Balena Etcher and select **Flash from URL**
+
+
+
+- **Step 4.** Copy and paste the below URL inside the empty box and click **OK**
+
+```sh
+https://github.com/home-assistant/operating-system/releases/download/9.0/haos_generic-x86-64-9.0.img.xz
+```
+
+
+
+- **Step 5.** Once the image is downloaded, click **Select target** and select the connected USB flash drive
+
+
+
+- **Step 6.** Click **Flash** to start writing the image to the USB flash drive
+
+
+
+If the flashing process is successful, you will see the below output
+
+
+
+- **Step 7.** Connect this USB flash drive to one of the USB ports on the ODYSSEY-X86 and turn on the board
+
+- **Step 8.** Keep pressing **DELETE** key to enter BIOS
+
+
+
+- **Step 9.** Go to **Boot** tab, select **Boot Option #1** and select **UEFI: OS (USB)** and click **Yes** for the pop-up
+
+
+
+
+
+Now ODYSSEY-X86 will reboot and use the connected USB drive as the boot device. After successful booting into Home Assistant OS, you will see the below output
+
+
+
+### Run Home Assistant from external HDD/ SSD, M.2 SSD, eMMC
+
+In this method, we will first create a bootable USB drive with Ubuntu Desktop and then boot ODYSSEY-X86 from it. After that we will flash Home Assistant OS to a drive (external HDD/ SSD, M.2 SSD, onboard eMMC) while we are inside the Ubuntu system and run Home Assistant from that drive.
+
+- **Step 1.** Download the latest Ubuntu Desktop image from [here](https://ubuntu.com/download/desktop)
+
+- **Step 2.** Connect a USB flash drive to your PC
+
+**Note:** It is recommended to use a flash drive with at least 8GB of storage capacity
+
+- **Step 3.** Download and install [Balena Etcher](https://www.balena.io/etcher) according to your operating system
+
+- **Step 4.** Open Balena Etcher, select **Flash from file**
+
+
+
+- **Step 5.** Click on downloaded **.iso file** and click **Open**
+
+
+
+- **Step 6.** Click **Select target**, select the connected USB flash drive and click **Select**
+
+
+
+
+
+- **Step 7.** Click **Flash** to flash Ubuntu server to USB flash drive
+
+
+
+If the flashing process is successful, you will see the below output
+
+
+
+- **Step 8.** Connect this USB flash drive to one of the USB ports on the ODYSSEY-X86, connect a storage drive (external HDD/ SSD, M.2 SSD) and power on the board
+
+**Note:** Make sure a keyboard, mouse and a display is connected to ODYSSEY-X86
+
+- **Step 9.** Keep pressing **DELETE** key to enter BIOS
+
+
+
+- **Step 10.** Go to **Boot** tab, select **Boot Option #1** and select **UEFI: USB, Partition 2**
+
+
+
+- **Step 11.** Go to **Save & Exit** tab, click **Save Changes and Reset** and click **Yes** for the pop-up
+
+
+
+
+
+Now ODYSSEY-X86 will reboot and use the connected USB drive as the boot device.
+
+- **Step 12.** Select **Try or Install Ubuntu**
+
+
+
+- **Step 13.** Click **Try Ubuntu**
+
+
+
+After a few seconds, it will boot into Ubuntu Desktop
+
+
+
+- **Step 14.** Open a terminal window by pressing **Ctrl+Alt+T**
+
+
+
+- **Step 15.** Type the following command to download Home Assistant OS image
+
+```sh
+wget https://github.com/home-assistant/operating-system/releases/download/9.0/haos_generic-x86-64-9.0.img.xz
+```
+
+- **Step 16.** Extract the file by using the below command
+
+```sh
+unxz haos_generic-x86-64-9.0.img.xz
+```
+
+This will extract the above **.img.xz** into **.img**
+
+- **Step 17.** Type **lsblk** to list the connected storage drives. Here we have connected an HDD drive via the SATA port.
+
+
+
+As you can see, the drive which is already running Ubuntu OS (USB flash drive) is **sdb** with several partitions and mountpoints. We can also identify this drive from the **SIZE**. This means the drive **sda** is the connected HDD drive.
+
+- **Step 18.** Enter the command below to flash the Home Assistant OS image to the connected HDD drive. In this case, drive **sda**
+
+```sh
+sudo dd if=haos_generic-x86-64-9.0.img of=/dev/sda status=progress
+```
+
+Wait a few minutes until the process is completed
+
+
+
+- **Step 19.** Type the following to reboot ODYSSEY-X86
+
+```sh
+sudo reboot
+```
+
+- **Step 20.** Remove the USB flash drive and press **ENTER** when you see the below prompt
+
+
+
+- **Step 21.** Enter BIOS as explained before and change the boot drive to the connected drive
+
+
+
+Now ODYSSEY-X86 will reboot and use the connected drive as the boot device. After successful booting into Home Assistant OS, you will see the below output
+
+
+
+## View Home Assistant Dashboard UI on web browser
+
+- **Step 1.** Open a web browser on a PC, tablet, smartphone type the following URL
+
+```sh
+homeassistant.local:8123
+```
+
+It will take some time to finish the initial start up process
+
+- **Step 2.** Once finished starting up, create an account and follow through the initial set up instuctions
+
+
+
+After that you will see your welcome dashboard as follows
+
+
+
+## View Home Assistant Dashboard UI in Kiosk mode on reTerminal
+
+To be able to view the Home Assistant Dashboard UI on [reTerminal](https://www.seeedstudio.com/ReTerminal-with-CM4-p-4904.html) LCD, we will use Chromium web browser which already comes with Raspberry Pi OS. We will set up Chromium so that it will autostart on full-screen mode after reTerminal is booted up.
+
+- **Step 1.** Turn on reTerminal and make sure Raspberry Pi OS is already installed. If not, you can follow [this wiki](https://wiki.seeedstudio.com/reTerminal-FAQ/#q2-how-can-i-flash-raspberry-pi-os-which-is-originally-shipped-with-reterminal).
+
+- **Step 2.** Navigate to the following directory
+
+```sh
+cd /etc/xdg/lxsession/LXDE-pi/
+```
+
+- **Step 3.** Open **autostart** file with **nano text editor**
+
+```sh
+sudo nano autostart
+```
+
+- **Step 4.** Add the following line to the end of the file
+
+```sh
+@chromium-browser --kiosk --incognito --disable-pinch --overscroll-history-navigation=0 homeassistant.local:8123
+```
+
+- **Step 5.** Reboot reTerminal
+
+```sh
+sudo reboot
+```
+
+Now when reTerminal boots up, Home Assistant dashboard UI will open in full-screen window !
+
+## Bonus
+
+After integrating smart lights, temperature, humidity sensors, CCTV and more, a complete Smart Home dashboard on Home Assistant will look like below
+
+
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Coral-Mini-PCIe-Accelerator-on-ODYSSEY-X86J4105.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Coral-Mini-PCIe-Accelerator-on-ODYSSEY-X86J4105.md
index 67917e6185ac8..df6e78f1fd895 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Coral-Mini-PCIe-Accelerator-on-ODYSSEY-X86J4105.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/Coral-Mini-PCIe-Accelerator-on-ODYSSEY-X86J4105.md
@@ -1,276 +1,275 @@
----
-description: ODYSSEY - X86J41x5
-title: Coral Mini PCIe Accelerator for ODYSSEY
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Coral-Mini-PCIe-Accelerator-x86
-last_update:
- date: 03/16/2023
- author: Lakshantha
-
----
-
-
-
-
-
-
-Coral Mini PCIe Accelerator on ODYSSEY X86J41x5 is an M.2 module that brings the edge tpu coprocessor to existing systems and products.
-
-The edge tpu is a small ASCI designed by google that provides high-performance ml influencing with low power requirements: it's capable of performing 4 trillion operations (tera-operations) per second (tops), using 0.5 watts for each tops (2 tops per watt). For example, it can execute state-of-the-art mobile vision models such as mobileNet v2 at almost 400 fps, in a power-efficient manner. This on-device processing reduces latency, increases data privacy, and removes the need for constant high-bandwidth connectivity.
-
-The M.2 Accelerator is a dual-key M.2 card ( B+M keys), designed to fit any compatible M.2 slot. This form-factor enables easy integration into arm and x86 platforms so you can add local ML acceleration to products such as embedded platforms, mini-PCs, and industrial gateways.
-
-[](https://www.seeedstudio.com/Coral-M-2-Accelerator-B-M-key-p-4411.html)
-
-## Features
-
-- Performs high-speed ML influencing
-- Works with debian linux
-- Supports tensorFlow lite
-- Supports [AutoML Vision Edge](https://cloud.google.com/vision/automl/docs/edge-quickstart)
-
-## Specification
-
-|Physical specifications | Value |
-|------|--------------|
-|Dimensions| B+M key: 22.00 x 80.00 x 2.35 mm |
-|Weight| B+M key: 5.8 g|
-|Host interface|
-|Hardware interface| M.2 B+M key (M.2-2280-B-M-S3)|
-|Serial interface| PCIe Gen2 x1|
-|Operating voltage| |
-|DC supply| 3.3V +/- 10 %|
-|Environmental reliability| |
-|Temperature| -40 ~ 85°C(storage) -20 ~ 70° C (operating)
-|Relative humidity| 0 ~ 100% (non-condensing)|
-|Mechanical reliability| |
-|Op-shock| 100 G, 11ms (persistent)1000 G, 0.5 ms (stress)1000 G, 1.0 ms (stress) |
-|Op-vibe (random)| 0.5 Grms, 5 - 500 Hz (persistent)3 Grms, 5 - 800 Hz (stress)|
-|Op-vibe (sinusoidal)|0.5 Grms, 5 - 500 Hz (persistent)3 Grms, 5 - 800 Hz (stress)|
-
-## Hardware Overview
-
-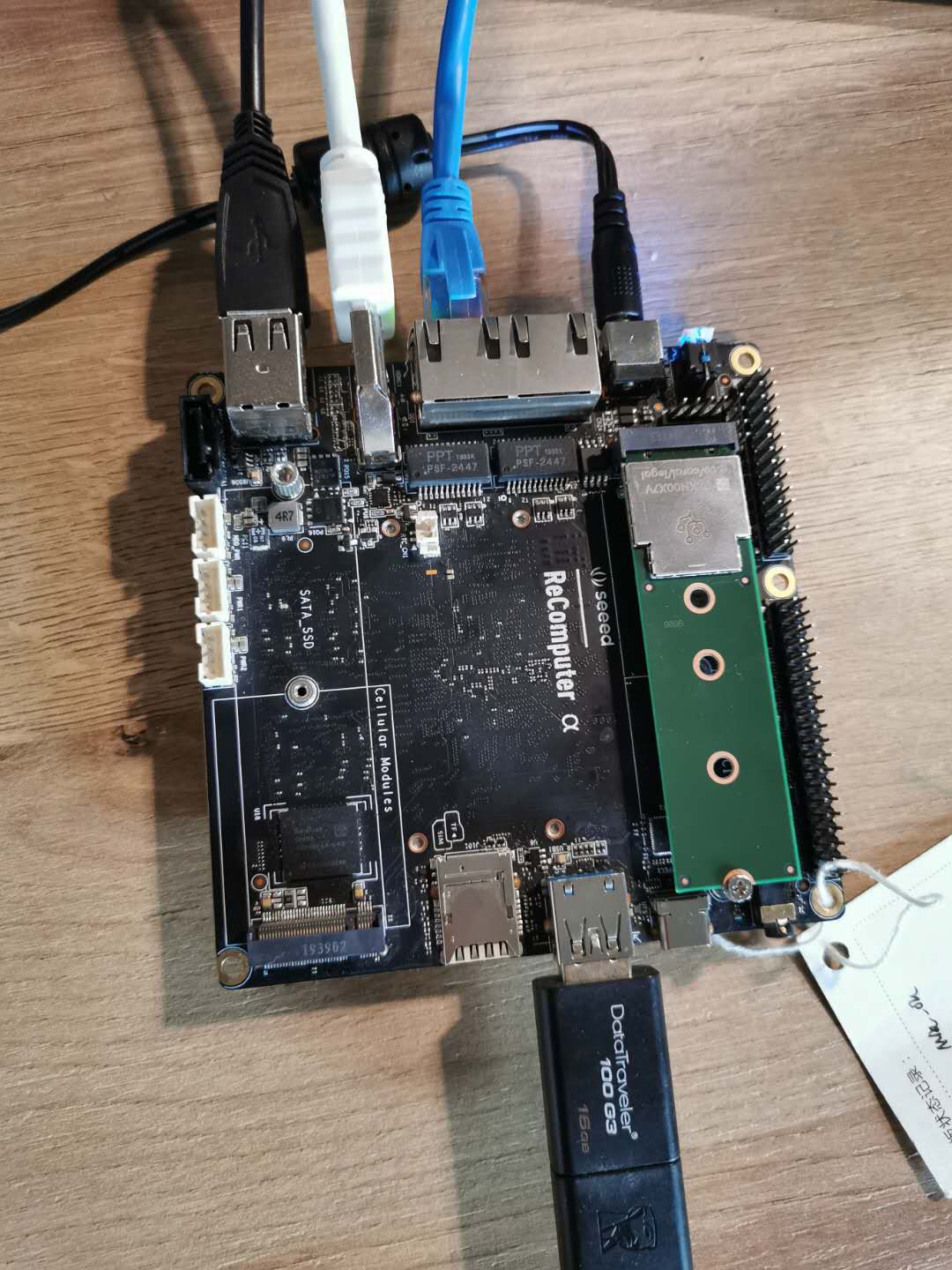
-
-## Getting Started
-
-### play with ODYSSEY - X86J4105
-
-**Materials required**
-
-| Coral Mini PCIe Accelerator | ODYSSEY X86J41x5 |
-|--------------|-------------|
-|||
-|[Get ONE Now](https://www.seeedstudio.com/Coral-M-2-Accelerator-B-M-key-p-4411.html)|[Get ONE Now](https://www.seeedstudio.com/ODYSSEY-X86J4105800-p-4445.html)|
-
-#### Hardware Connection
-
-The steps of hardware connection is very simple.
-
-- **Step 1.** Connecting Coral Mini PCIe Accelerator to the ODYSSEY - X86J41x5.
-- **Step 2.** Connecting the power to the ODYSSEY - X86J41x5.
-- **Step 3.** Connecting the power and display to the ODYSSEY - X86J41x5.
-- **Step 4.** Connecting the keyboard and mouse to the ODYSSEY - X86J41x5.
-- **Step 5.** If you have a network cable, please connect it to you ODYSSEY - X86J41x5.
-
-## Software
-
-After we finished hardware connection,the next step is to solve software problems.
- Here I'll tell you a few installation steps: install PCIe driver, edge tpu runtime, and the tensorFlow Lite runtime.
-
-At first, what you need is a linux computer, please follow the step.
-
-- You can choose x86-64, ARMv7 (32-bit), or ARMv8 (64-bit) system .
-
- Please refer to how to [create a bootable USB drive and install Linux OS(Ubuntu Desktop 18.04)](https://wiki.seeedstudio.com/ODYSSEY-X86J4105-Installing-OS/) onto the ODYSSEY - X86J41x5.
-
-- An available Coral Mini PCIe Accelerator on ODYSSEY X86J41x5
-
-- Debian 6.0 Linux distribution or higher, or any derivative thereof (such as Ubuntu 10.0+)
-
-- Python 3.5 or higher
-
-After you successfully make the U disk boot disk and install the Linux os file , you can go to the next step.
-
-## 1.Install the PCIe driver
-
-If you already installed a pre-built Apex driver, you should consider Whether the drive will result in the Edge TPU fail, because some of the drivers have bugs lead to these mistakes. So you should check it. So first follow these steps:
-
- 1.Check your linux kernel version with this command:
-
- ```
- uname -r
-
- ```
-
- If it prints 4.18 or lower, you should be okay and can skip beginning installing our pcie driver.
-
- 2.If your kernel version is 4.19 or higher, now check if you have a pre-build apex driver installed:
-
- ```
- lsmod | grep apex
-
- ```
-
- If it prints nothing, then you're okay and continue to install our pcie driver.
-
- If it does print an apex module name, stop here and follow the [workaround to disable Apex and Gasket](https://coral.ai/docs/m2/get-started/#workaround-to-disable-apex-and-gasket).
-
-Install pcie driver as follows:
-
-1. Make sure the host system where you'll connect the module is shut down.
-
-2. Connect the Coral PCIe module to your host system at the B Key M.2 interface(SATA_SSD M.2 interface not support the Coral module).
-
-3. Boot the system and make sure it has an internet connection. Then add our debian package repository to your system and install our pcie driver with these commands:
-
-```
-echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list
-
-curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -
-
-sudo apt update
-
-sudo apt-get install gasket-dkms
-```
-
-4. If the user account you'll be using does not have root permissions, you might need to add the following udev rule, and then verify that the "apex" group exists and that your user is added to it:
-
-```
- sudo sh -c "echo 'SUBSYSTEM==\"apex\", MODE=\"0660\", GROUP=\"apex\"' >> /etc/udev/rules.d/65-apex.rules"
-
- sudo groupadd apex
-
- sudo adduser $USER apex
-```
-
-5. Reboot the system.
-
-6. Verify that the accelerator module is detected:
-
- ```
- lspci -x | grep 089a
- ```
-
- You should see something like this:
-
- ```
- 03:00.0 System peripheral: Device 1ac1:089a
- ```
-
- The 03 number and system peripheral name might be different because those are host-system specific, but as long as you see a device listed with 089a then you're okay to proceed.
-
-7. Verify that the pcie driver is loaded:
-
- ```
- ls /dev/apex_0
- ```
-
- You should simply see the name repeated back:
-
- ```
- /dev/apex_0
-
- ```
-
-## 2. Install the edge tpu runtime
-
-The edge tpu runtime is required to communicate with the edge tpu. You can install it on your host computer from a command line as follows:
-
-```
-sudo apt-get install libedgetpu1-std
-```
-
-Notes
-> Unlike the [USB Accelerator](https://coral.ai/products/accelerator/), the mini pcie and M.2 accelerator do not use different runtime packages for "reduced" and "maximum" clock frequencies. Instead, these devices operate at the maximum frequency by default and perform [power throttling based on thermal limits](https://coral.ai/docs/m2/get-started/#operating-frequency-and-thermal-settings).
-
-## 3. Install the TensorFlow Lite library
-
-There are several ways you can install TensorFlow's apis, but to get started with Python, the easiest option is to install the tflite_runtime package. This package provides the bare minimum code required to run an inference with python (primarily, the [Interpreter](https://www.tensorflow.org/api_docs/python/tf/lite/Interpreter) api), thus saving you a lot of disk space.
-
-To install it, follow the [TensorFlow Lite Python quickstart](https://www.tensorflow.org/lite/guide/python), and then return to this page after you run the pip3 install command.
-
-## 4. Run a model using the TensorFlow Lite API
-
-Now you're ready to run inference on the edge tpu. Follow these steps to perform image classification with our example code and model:
-
- 1. Download the example code from GitHub:
-
-```
- mkdir coral && cd coral
-
- git clone https://github.com/google-coral/tflite.git
-```
-
- 2. Download the bird classifier model, labels file, and a bird photo:
-
-```
-cd tflite/python/examples/classification
-
-bash install_requirements.sh
-```
-
- 3. Run the image classifier with the bird photo (shown in figure 1):
-
-```
-python3 classify_image.py \
---model models/mobilenet_v2_1.0_224_inat_bird_quant_edgetpu.tflite \
---labels models/inat_bird_labels.txt \
---input images/parrot.jpg
-```
-
-
-
-You should see results like this:
-
-```
-INFO: Initialized TensorFlow Lite runtime.
-----INFERENCE TIME----
-Note: The first inference on Edge TPU is slow because it includes loading the model into Edge TPU memory.
-11.8ms
-3.0ms
-2.8ms
-2.9ms
-2.9ms
--------RESULTS--------
-Ara macao (Scarlet Macaw): 0.76562
-```
-
-Congrats! You just performed an inference on the edge tpu using tensorflow lite.
-
-To demonstrate varying inference speeds, the example repeats the same inference five times. It prints the time to perform each inference and the top classification (the label ID/name and the confidence score, from 0 to 1.0). Your inference speeds might differ based on your host system.
-
-The classify_image.py example above uses the tensorflow lite python api. To learn more about how it works, take a look at [the classify_image.py source code](https://github.com/google-coral/tflite/blob/master/python/examples/classification/classify_image.py) and read about how to [run inference with TensorFlow Lite](https://www.tensorflow.org/lite/guide/inference#load_and_run_a_model_in_python).
-
-As an alternative to using the tensorflow lite api (used above), you can use the [Edge TPU Python API](https://coral.ai/docs/edgetpu/api-intro/), which provides high-level apis to perform inference with image classification and object detection models with just a few lines of code. For example, try our other version of [classify_image.py using the Edge TPU API](https://coral.ai/examples/classify-image/).
-
-You can also [run inference using C++ and TensorFlow Lite](https://coral.ai/docs/edgetpu/tflite-cpp/).
-
-Resources
---------
-
-- [Datasheet](https://github.com/SeeedDocument/Bazaar_Document/raw/master/Coral-M2-datasheet.pdf)
-- [Coral Ai user manual](https://coral.ai/docs/mini-pcie/datasheet/#)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Coral Mini PCIe Accelerator for ODYSSEY
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /Coral-Mini-PCIe-Accelerator-x86
+last_update:
+ date: 03/16/2023
+ author: Lakshantha
+---
+
+
+
+
+
+
+Coral Mini PCIe Accelerator on ODYSSEY X86J41x5 is an M.2 module that brings the edge tpu coprocessor to existing systems and products.
+
+The edge tpu is a small ASCI designed by google that provides high-performance ml influencing with low power requirements: it's capable of performing 4 trillion operations (tera-operations) per second (tops), using 0.5 watts for each tops (2 tops per watt). For example, it can execute state-of-the-art mobile vision models such as mobileNet v2 at almost 400 fps, in a power-efficient manner. This on-device processing reduces latency, increases data privacy, and removes the need for constant high-bandwidth connectivity.
+
+The M.2 Accelerator is a dual-key M.2 card ( B+M keys), designed to fit any compatible M.2 slot. This form-factor enables easy integration into arm and x86 platforms so you can add local ML acceleration to products such as embedded platforms, mini-PCs, and industrial gateways.
+
+[](https://www.seeedstudio.com/Coral-M-2-Accelerator-B-M-key-p-4411.html)
+
+## Features
+
+- Performs high-speed ML influencing
+- Works with debian linux
+- Supports tensorFlow lite
+- Supports [AutoML Vision Edge](https://cloud.google.com/vision/automl/docs/edge-quickstart)
+
+## Specification
+
+|Physical specifications | Value |
+|------|--------------|
+|Dimensions| B+M key: 22.00 x 80.00 x 2.35 mm |
+|Weight| B+M key: 5.8 g|
+|Host interface|
+|Hardware interface| M.2 B+M key (M.2-2280-B-M-S3)|
+|Serial interface| PCIe Gen2 x1|
+|Operating voltage| |
+|DC supply| 3.3V +/- 10 %|
+|Environmental reliability| |
+|Temperature| -40 ~ 85°C(storage) -20 ~ 70° C (operating)
+|Relative humidity| 0 ~ 100% (non-condensing)|
+|Mechanical reliability| |
+|Op-shock| 100 G, 11ms (persistent)1000 G, 0.5 ms (stress)1000 G, 1.0 ms (stress) |
+|Op-vibe (random)| 0.5 Grms, 5 - 500 Hz (persistent)3 Grms, 5 - 800 Hz (stress)|
+|Op-vibe (sinusoidal)|0.5 Grms, 5 - 500 Hz (persistent)3 Grms, 5 - 800 Hz (stress)|
+
+## Hardware Overview
+
+
+
+## Getting Started
+
+### play with ODYSSEY - X86J4105
+
+**Materials required**
+
+| Coral Mini PCIe Accelerator | ODYSSEY X86J41x5 |
+|--------------|-------------|
+|||
+|[Get ONE Now](https://www.seeedstudio.com/Coral-M-2-Accelerator-B-M-key-p-4411.html)|[Get ONE Now](https://www.seeedstudio.com/ODYSSEY-X86J4105800-p-4445.html)|
+
+#### Hardware Connection
+
+The steps of hardware connection is very simple.
+
+- **Step 1.** Connecting Coral Mini PCIe Accelerator to the ODYSSEY - X86J41x5.
+- **Step 2.** Connecting the power to the ODYSSEY - X86J41x5.
+- **Step 3.** Connecting the power and display to the ODYSSEY - X86J41x5.
+- **Step 4.** Connecting the keyboard and mouse to the ODYSSEY - X86J41x5.
+- **Step 5.** If you have a network cable, please connect it to you ODYSSEY - X86J41x5.
+
+## Software
+
+After we finished hardware connection,the next step is to solve software problems.
+ Here I'll tell you a few installation steps: install PCIe driver, edge tpu runtime, and the tensorFlow Lite runtime.
+
+At first, what you need is a linux computer, please follow the step.
+
+- You can choose x86-64, ARMv7 (32-bit), or ARMv8 (64-bit) system .
+
+ Please refer to how to [create a bootable USB drive and install Linux OS(Ubuntu Desktop 18.04)](https://wiki.seeedstudio.com/ODYSSEY-X86J4105-Installing-OS/) onto the ODYSSEY - X86J41x5.
+
+- An available Coral Mini PCIe Accelerator on ODYSSEY X86J41x5
+
+- Debian 6.0 Linux distribution or higher, or any derivative thereof (such as Ubuntu 10.0+)
+
+- Python 3.5 or higher
+
+After you successfully make the U disk boot disk and install the Linux os file , you can go to the next step.
+
+## 1.Install the PCIe driver
+
+If you already installed a pre-built Apex driver, you should consider Whether the drive will result in the Edge TPU fail, because some of the drivers have bugs lead to these mistakes. So you should check it. So first follow these steps:
+
+ 1.Check your linux kernel version with this command:
+
+ ```
+ uname -r
+
+ ```
+
+ If it prints 4.18 or lower, you should be okay and can skip beginning installing our pcie driver.
+
+ 2.If your kernel version is 4.19 or higher, now check if you have a pre-build apex driver installed:
+
+ ```
+ lsmod | grep apex
+
+ ```
+
+ If it prints nothing, then you're okay and continue to install our pcie driver.
+
+ If it does print an apex module name, stop here and follow the [workaround to disable Apex and Gasket](https://coral.ai/docs/m2/get-started/#workaround-to-disable-apex-and-gasket).
+
+Install pcie driver as follows:
+
+1. Make sure the host system where you'll connect the module is shut down.
+
+2. Connect the Coral PCIe module to your host system at the B Key M.2 interface(SATA_SSD M.2 interface not support the Coral module).
+
+3. Boot the system and make sure it has an internet connection. Then add our debian package repository to your system and install our pcie driver with these commands:
+
+```
+echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list
+
+curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -
+
+sudo apt update
+
+sudo apt-get install gasket-dkms
+```
+
+4. If the user account you'll be using does not have root permissions, you might need to add the following udev rule, and then verify that the "apex" group exists and that your user is added to it:
+
+```
+ sudo sh -c "echo 'SUBSYSTEM==\"apex\", MODE=\"0660\", GROUP=\"apex\"' >> /etc/udev/rules.d/65-apex.rules"
+
+ sudo groupadd apex
+
+ sudo adduser $USER apex
+```
+
+5. Reboot the system.
+
+6. Verify that the accelerator module is detected:
+
+ ```
+ lspci -x | grep 089a
+ ```
+
+ You should see something like this:
+
+ ```
+ 03:00.0 System peripheral: Device 1ac1:089a
+ ```
+
+ The 03 number and system peripheral name might be different because those are host-system specific, but as long as you see a device listed with 089a then you're okay to proceed.
+
+7. Verify that the pcie driver is loaded:
+
+ ```
+ ls /dev/apex_0
+ ```
+
+ You should simply see the name repeated back:
+
+ ```
+ /dev/apex_0
+
+ ```
+
+## 2. Install the edge tpu runtime
+
+The edge tpu runtime is required to communicate with the edge tpu. You can install it on your host computer from a command line as follows:
+
+```
+sudo apt-get install libedgetpu1-std
+```
+
+Notes
+> Unlike the [USB Accelerator](https://coral.ai/products/accelerator/), the mini pcie and M.2 accelerator do not use different runtime packages for "reduced" and "maximum" clock frequencies. Instead, these devices operate at the maximum frequency by default and perform [power throttling based on thermal limits](https://coral.ai/docs/m2/get-started/#operating-frequency-and-thermal-settings).
+
+## 3. Install the TensorFlow Lite library
+
+There are several ways you can install TensorFlow's apis, but to get started with Python, the easiest option is to install the tflite_runtime package. This package provides the bare minimum code required to run an inference with python (primarily, the [Interpreter](https://www.tensorflow.org/api_docs/python/tf/lite/Interpreter) api), thus saving you a lot of disk space.
+
+To install it, follow the [TensorFlow Lite Python quickstart](https://www.tensorflow.org/lite/guide/python), and then return to this page after you run the pip3 install command.
+
+## 4. Run a model using the TensorFlow Lite API
+
+Now you're ready to run inference on the edge tpu. Follow these steps to perform image classification with our example code and model:
+
+ 1. Download the example code from GitHub:
+
+```
+ mkdir coral && cd coral
+
+ git clone https://github.com/google-coral/tflite.git
+```
+
+ 2. Download the bird classifier model, labels file, and a bird photo:
+
+```
+cd tflite/python/examples/classification
+
+bash install_requirements.sh
+```
+
+ 3. Run the image classifier with the bird photo (shown in figure 1):
+
+```
+python3 classify_image.py \
+--model models/mobilenet_v2_1.0_224_inat_bird_quant_edgetpu.tflite \
+--labels models/inat_bird_labels.txt \
+--input images/parrot.jpg
+```
+
+
+
+You should see results like this:
+
+```
+INFO: Initialized TensorFlow Lite runtime.
+----INFERENCE TIME----
+Note: The first inference on Edge TPU is slow because it includes loading the model into Edge TPU memory.
+11.8ms
+3.0ms
+2.8ms
+2.9ms
+2.9ms
+-------RESULTS--------
+Ara macao (Scarlet Macaw): 0.76562
+```
+
+Congrats! You just performed an inference on the edge tpu using tensorflow lite.
+
+To demonstrate varying inference speeds, the example repeats the same inference five times. It prints the time to perform each inference and the top classification (the label ID/name and the confidence score, from 0 to 1.0). Your inference speeds might differ based on your host system.
+
+The classify_image.py example above uses the tensorflow lite python api. To learn more about how it works, take a look at [the classify_image.py source code](https://github.com/google-coral/tflite/blob/master/python/examples/classification/classify_image.py) and read about how to [run inference with TensorFlow Lite](https://www.tensorflow.org/lite/guide/inference#load_and_run_a_model_in_python).
+
+As an alternative to using the tensorflow lite api (used above), you can use the [Edge TPU Python API](https://coral.ai/docs/edgetpu/api-intro/), which provides high-level apis to perform inference with image classification and object detection models with just a few lines of code. For example, try our other version of [classify_image.py using the Edge TPU API](https://coral.ai/examples/classify-image/).
+
+You can also [run inference using C++ and TensorFlow Lite](https://coral.ai/docs/edgetpu/tflite-cpp/).
+
+Resources
+--------
+
+- [Datasheet](https://github.com/SeeedDocument/Bazaar_Document/raw/master/Coral-M2-datasheet.pdf)
+- [Coral Ai user manual](https://coral.ai/docs/mini-pcie/datasheet/#)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-Accessories.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-Accessories.md
index 6a188432239dc..8cbdb8d803657 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-Accessories.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-Accessories.md
@@ -1,213 +1,211 @@
----
-description: ODYSSEY - X86J41x5
-title: Adding Accessories
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-Accessories
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-# Adding Accessories to ODYSSEY - X86J41x5
-
-This wiki introduces how to add different accessories to ODYSSEY - X86J41x5 to boost up the performance to fit your needs. For instance, you might be using ODYSSEY-X86J41x5 for a more graphics required scenario, hence the need of **adding an external GPU for high performance.** Or in some cases such as NAS, you would prefer **two HDD hard drive instead of using SSD for stability reasons.**
-
-
-
-## 1. Adding Additional Storage via PCIe to SATA III (HDD Hard Drives)
-
-On ODYSSEY-X86J41x5, there is **1 M.2 SATA SSD, 1 M.2 PCIe SSD and 1 SATA III connectors with 3 SATA III power connectors.** For standard use, these connectors are enough. However, for more of a industrial usage would prefer using HDD instead of SSD. This demonstrates how to attach more than 1 HDD to ODYSSEY-X86J41x5.
-
-### Materials Required
-
-- **M.2 PCIe to SATA Adapter**
-
-- HDD Hard Drives (Maximum 3 HDD supported on ODYSSEY-X86J41x5)
-
-To attach more HDD to ODYSSEY-X86J41x5, we need an extra component, a M.2 PCIe to SATA adapter which can convert the M.2 PCIe slot into SATA data connector. This adapter can be purchased commonly on the electronics market.
-
-### Hardware Instructions
-
-- Attach the M.2 PCIe to SATA adapter to the PCIe slot of the ODYSSEY-X86J41x5 and plug the HDD data cable into it as shown below. Connect the HDD power cable to one of the three SATA III power connectors.
-
-
-
-
-
-
-- You can have maximum of 3 HDD hard drives connected to the ODYSSEY-X86J41x5. Boot up the devices and check if the hard drives shown up in the operating system.
-
-### Result
-
-Once booted in the OS, you should be able to see the hard drives.
-
-
-
-
-
-Now you don't have to worry about the storage issue no more!
-
-## 2. Adding an External GPU to the ODYSSEY-X86J41x5
-
-To add external GPU to the ODYSSEY-X86J41x5 to boost up performance, you will also need an extra component.
-
-### Materials Required
-
-- **M.2 PCIe x4 to PCIe x16 Adapter**
-
-- **DC power for GPU**
-
-The components are not yet available to sell from Seeed, so please be patient for now or get it from the electronics market. Make sure that the Adapter is suitable for GPU usage.
-
-### Initial BIOS Setup
-
-Some configurations in the BIOS are needed for enabling GPU:
-
-1.Enter BIOS menu by keeping **DEL** key when booting up.
-
-2.Navigate to **Advanced** -> **CSM Support** and press Enter to enable it.
-
-
-
-
-
-
-3.Navigate to **Chipset** -> **Primary Display** and select **PCIe** and press Enter.
-
-
-
-
-
-
-Save the BIOS settings and power off the device.
-
-### Hardware Instructions
-
-- Insert your GPU into the PCIe x16 end of the adapter.
-
-- Insert the Adapter to M.2 PCIe slot of the ODYSSEY-X86J41x5,
-
-- The GPU also needs an external power, here I used a DIY 4-pin to DC jack to supply the 12V power **(Only do this if know what you are doing)**. There is also 4-pin to DC jack on the market out there that you can buy.
-
-
-
-
-
-
-- Connect the HDMI to the GPU instead of the ODYSSEY-X86J41x5.
-
-:::note
-Please be careful during the hardware connection. Make sure everything is connected correctly before turning on power or you may in danger of damaging components.
-:::
-
-### Installing GPU's Driver
-
-If everything goes well, the device should boot up properly and enters into the OS. But also need to install the GPU drivers to the OS. If you are a Windows user this will be very easy. Here I will demonstrate installing GPU(Nvidia) drivers on Ubuntu(Linux) for reference.
-
-1.Open terminal and type the following command to check the GPU:
-
-```bash
-lspci | grep -i vga
-```
-
-
-
-
-
-
-Here we can see two GPUs, one is the on-board GPU and the other is the external GPU(GTX 750).
-
-2.First, we need to disable the **nouveau** services on Ubuntu. In Terminal, use `nano` or `vim` to open the `/etc/modprobe.d/blacklist.conf`.
-
-```bash
-sudo nano /etc/modprobe.d/blacklist.conf
-```
-
-
-
-
-
-
-3.Add the following code at the end and save the changes.
-
-```bash
-blacklist nouveau
-options nouveau modeset=0
-```
-
-
-
-
-
-
-4.Run the following command to update:
-
-```bash
-sudo update-initramfs -u
-```
-
-
-
-
-
-
-5.Reboot the device to take on changes and can run the following command, if nothing appears then the service is disabled.
-
-```bash
-lsmod | grep nouveau
-```
-
-6.Now we can use the ubuntu built-in command to check the drivers needed for the external GPU:
-
-```bash
-ubuntu-drivers devices
-```
-
-
-
-
-
-
-This will determine the GPU model and recommend the drivers for it. Here recommended the nvidia-driver-435 for the external GPU.
-
-7.Auto install the driver using the following command, and reboot the device to take on the effect.
-
-```bash
-sudo ubuntu-drivers autoinstall
-```
-
-By now, the driver should be installed on the ODYSSEY-X86J4105! You can check the status of GPU by running the following command in the Terminal.
-
-```bash
-nvidia-smi
-```
-
-
-
-
-
-
-Or simply go to the settings:
-
-
-
-
-
-
-Now enjoy the boosted up ODYSSEY-X86J41x5 and all set to dive in the field of AI where it requires a lot of GPU power!
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Adding Accessories
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-Accessories
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+# Adding Accessories to ODYSSEY - X86J41x5
+
+This wiki introduces how to add different accessories to ODYSSEY - X86J41x5 to boost up the performance to fit your needs. For instance, you might be using ODYSSEY-X86J41x5 for a more graphics required scenario, hence the need of **adding an external GPU for high performance.** Or in some cases such as NAS, you would prefer **two HDD hard drive instead of using SSD for stability reasons.**
+
+
+
+## 1. Adding Additional Storage via PCIe to SATA III (HDD Hard Drives)
+
+On ODYSSEY-X86J41x5, there is **1 M.2 SATA SSD, 1 M.2 PCIe SSD and 1 SATA III connectors with 3 SATA III power connectors.** For standard use, these connectors are enough. However, for more of a industrial usage would prefer using HDD instead of SSD. This demonstrates how to attach more than 1 HDD to ODYSSEY-X86J41x5.
+
+### Materials Required
+
+- **M.2 PCIe to SATA Adapter**
+
+- HDD Hard Drives (Maximum 3 HDD supported on ODYSSEY-X86J41x5)
+
+To attach more HDD to ODYSSEY-X86J41x5, we need an extra component, a M.2 PCIe to SATA adapter which can convert the M.2 PCIe slot into SATA data connector. This adapter can be purchased commonly on the electronics market.
+
+### Hardware Instructions
+
+- Attach the M.2 PCIe to SATA adapter to the PCIe slot of the ODYSSEY-X86J41x5 and plug the HDD data cable into it as shown below. Connect the HDD power cable to one of the three SATA III power connectors.
+
+
+
+
+
+
+- You can have maximum of 3 HDD hard drives connected to the ODYSSEY-X86J41x5. Boot up the devices and check if the hard drives shown up in the operating system.
+
+### Result
+
+Once booted in the OS, you should be able to see the hard drives.
+
+
+
+
+
+Now you don't have to worry about the storage issue no more!
+
+## 2. Adding an External GPU to the ODYSSEY-X86J41x5
+
+To add external GPU to the ODYSSEY-X86J41x5 to boost up performance, you will also need an extra component.
+
+### Materials Required
+
+- **M.2 PCIe x4 to PCIe x16 Adapter**
+
+- **DC power for GPU**
+
+The components are not yet available to sell from Seeed, so please be patient for now or get it from the electronics market. Make sure that the Adapter is suitable for GPU usage.
+
+### Initial BIOS Setup
+
+Some configurations in the BIOS are needed for enabling GPU:
+
+1.Enter BIOS menu by keeping **DEL** key when booting up.
+
+2.Navigate to **Advanced** -> **CSM Support** and press Enter to enable it.
+
+
+
+
+
+
+3.Navigate to **Chipset** -> **Primary Display** and select **PCIe** and press Enter.
+
+
+
+
+
+
+Save the BIOS settings and power off the device.
+
+### Hardware Instructions
+
+- Insert your GPU into the PCIe x16 end of the adapter.
+
+- Insert the Adapter to M.2 PCIe slot of the ODYSSEY-X86J41x5,
+
+- The GPU also needs an external power, here I used a DIY 4-pin to DC jack to supply the 12V power **(Only do this if know what you are doing)**. There is also 4-pin to DC jack on the market out there that you can buy.
+
+
+
+
+
+
+- Connect the HDMI to the GPU instead of the ODYSSEY-X86J41x5.
+
+:::note
+Please be careful during the hardware connection. Make sure everything is connected correctly before turning on power or you may in danger of damaging components.
+:::
+
+### Installing GPU's Driver
+
+If everything goes well, the device should boot up properly and enters into the OS. But also need to install the GPU drivers to the OS. If you are a Windows user this will be very easy. Here I will demonstrate installing GPU(Nvidia) drivers on Ubuntu(Linux) for reference.
+
+1.Open terminal and type the following command to check the GPU:
+
+```bash
+lspci | grep -i vga
+```
+
+
+
+
+
+
+Here we can see two GPUs, one is the on-board GPU and the other is the external GPU(GTX 750).
+
+2.First, we need to disable the **nouveau** services on Ubuntu. In Terminal, use `nano` or `vim` to open the `/etc/modprobe.d/blacklist.conf`.
+
+```bash
+sudo nano /etc/modprobe.d/blacklist.conf
+```
+
+
+
+
+
+
+3.Add the following code at the end and save the changes.
+
+```bash
+blacklist nouveau
+options nouveau modeset=0
+```
+
+
+
+
+
+
+4.Run the following command to update:
+
+```bash
+sudo update-initramfs -u
+```
+
+
+
+
+
+
+5.Reboot the device to take on changes and can run the following command, if nothing appears then the service is disabled.
+
+```bash
+lsmod | grep nouveau
+```
+
+6.Now we can use the ubuntu built-in command to check the drivers needed for the external GPU:
+
+```bash
+ubuntu-drivers devices
+```
+
+
+
+
+
+
+This will determine the GPU model and recommend the drivers for it. Here recommended the nvidia-driver-435 for the external GPU.
+
+7.Auto install the driver using the following command, and reboot the device to take on the effect.
+
+```bash
+sudo ubuntu-drivers autoinstall
+```
+
+By now, the driver should be installed on the ODYSSEY-X86J4105! You can check the status of GPU by running the following command in the Terminal.
+
+```bash
+nvidia-smi
+```
+
+
+
+
+
+
+Or simply go to the settings:
+
+
+
+
+
+
+Now enjoy the boosted up ODYSSEY-X86J41x5 and all set to dive in the field of AI where it requires a lot of GPU power!
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-GPIO.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-GPIO.md
index f49d5c5f5c42d..1b1d78714bcb9 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-GPIO.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-GPIO.md
@@ -1,242 +1,240 @@
----
-description: ODYSSEY - X86J41x5
-title: Accessing 40-pin GPIO
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-GPIO
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 03/16/2023
- author: Lakshantha
-
----
-
-# Accessing and Controlling ODYSSEY - X86J41x5 40-Pin GPIO
-
-This tutorial demonstrates how to access and control the 40-pin GPIO of ODYSSEY - X86J41x5 under Linux (Ubuntu). With this, you can start to build your IoT projects using [ODYSSEY - X86J41x5](https://www.seeedstudio.com/ODYSSEY-X86J4105800-p-4445.html) with ease!
-
-## 40-Pin GPIO Pinout Diagram
-
-### Ubuntu 18.04
-
-
Linux GPIO
Function
RPi GPIO
Pin No.
Pin No.
RPi GPIO
Function
Linux GPIO
3.3V
1
2
5V
386
I2C5_SDA
BCM2_SDA
3
4
5V
387
I2C5_SCL
BCM3_SCL
5
6
GROUND
337
BCM4
7
8
BCM14_TXD
493
UART0_TXD
GROUND
9
10
BCM15_RXD
492
UART0_RXD
364
BCM17
11
12
BCM18
338
412
BCM27
13
14
GROUND
413
BCM22
15
16
BCM23
421
3.3V
17
18
BCM24
422
359
SPI0_MOSI
BCM10_MOSI
19
20
GROUND
358
SPI0_MISO
BCM9_MISO
21
22
BCM25
390
355
SPI0_CLK
BCM11_SCLK
23
24
BCM8_CE0
356
SPI0_FSO
GROUND
25
26
BCM7_CE1
357
SPI0_FS1
388
I2C6_SDA
BCM0_ID_SD
27
28
BCM1_ID_SCL
389
I2C6_SCL
415
BCM5
29
30
GROUND
416
BCM6
31
32
BCM12
391
417
BCM13
33
34
GROUND
339
BCM19
35
36
BCM16
410
419
BCM26
37
38
BCM20
340
GROUND
39
40
BCM21
341
-
----
-
Pin Legend
GPIO
UART
I2C
SPI
-
-### Ubuntu 20.04
-
-
-
-### Ubuntu 22.04
-
-
-
-## GPIO
-
-**The default pins on the ODYSSEY - X86J41x5 are configured to function mode so for example the pin 3 is set to I2C at default instead of GPIO mode. If you preferde using GPIO at default please check below.**
-
-:::note
-The 40-Pin GPIO has been equipped with bidirectional level conversion, and the current must not exceed 1 mA when in use. This means that the IO current is quite low.
-:::
-
-You can use the GPIO or change the function mode pin to GPIO using the Linux sysfs GPIO interface. Let's take pin 7 for example, the following code will turn on a LED module connected to Pin 7:
-
-```bash
-sudo -i
-cd /sys/class/gpio
-echo 337 > export
-cd gpio337
-echo "out" > direction
-echo 1 > value
-```
-
-
-
-
-
-To switch the LED off:
-
-```bash
-echo 0 > value
-```
-
-After finishing with using the GPIO, need to unexport it:
-
-```bash
-echo "in" > direction
-cd ..
-echo 337 > unexport
-```
-
-### Interrupts
-
-To test interrupts on ODYSSEY - X86J41x5, please follow the instructions below:
-
-Here I used the [python-periphery](https://github.com/vsergeev/python-periphery) to access GPIO interface in userspace Linux (Linux GPIO numbering).
-
-- Install python3-pip.
-
-```bash
-sudo apt install python3-pip
-```
-
-- Install [python-periphery](https://github.com/vsergeev/python-periphery).
-
-```bash
-sudo pip3 install python-periphery
-```
-
-1. Download the [IRQtest](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/IRQtest.zip) test script to your local drive.
-
-2. Change the directory to where the downloaded script is and run the test script:
-
-```bash
-sudo python3 IRQtest.py
-```
-
-
-
-
-
-### Changing pins to default GPIO mode
-
-If you prefer 40-pin to be in default GPIO, you can do this by changing setting in the BIOS.
-
-1. Reboot your ODYSSEY - X86J41x5 and keep pressing **DEL** key while booting up to enter BIOS menu.
-
-2. Navigate to **Advanced** -> **HAT Configuration**.
-
-3. Change function GPIO to GPIO mode as you preferred!
-
-
-
-
-
-**Note:** You can also set other GPIO to output by default.
-
-### Using Grove Base Hat for Simple Control
-
-You can also use Grove Base Hat for Raspberry Pi for simple digital signals. I.e. The I2C and UART ports cannot be used for now (The firmware of Grove Base Hat for Odyssey-X86 is being developed, and will be released very soon).
-
-Let's take **`D5`** port on Grove Base Hat for example:
-
-**Note:** This is referring to the Raspberry Pi's BCM numbering system -> **`BCM5`**. So for now to use for Odyssey-X86, need to figure out its physical pins, which is actually physical **Pin No. `29`**. *Refernece: [Raspberry Pinouts](https://pinout.xyz/)*.
-
-So the physical pins for using D5 on the Grove Base Hat connected to Odyssey-X86 is 29 which is the linux GPIO **`415`**.
-
-Now, we can use the same methods as above to control this GPIO:
-
-```bash
-sudo -i
-cd /sys/class/gpio
-echo 415 > export
-cd gpio415
-echo "out" > direction
-echo 1 > value
-```
-
-
-
-To unexport, follow the same steps as before.
-
-## UART
-
-To check the UART devices on ODYSSEY - X86J41x5, please run the following command:
-
-```bash
-ls /sys/bus/pci/devices/0000\:00\:18.?/dw-apb-uart.*/tty/ | grep tty
-```
-
-
-
-The **`ttyS4`** is associated with the UART Pin on the 40-pin header (**Pin 8 and Pin 10**). To access from these pins, please follow:
-
-```bash
-sudo apt install screen
-sudo screen /dev/ttyS4/ 115200
-```
-
-## I2C
-
-:::note
- The Default I2C Speed for ODYSSEY - X86J41x5 is 1MB/s, which cannot be configured.
-:::
-
-To identify I2C ports on ODYSSEY - X86J41x5, you can execute the following command:
-
-- **i2c_designware.0** -> I2C channel on **Pin 27 and 28 (I2C6_SDA and I2C6_SCL)**
-
-```bash
-ls /sys/bus/pci/devices/*/i2c_designware.0/ | grep i2c
-```
-
-- **i2c_designware.1** -> I2C channel on **Pin 3 and 5 (I2C5_SDA and I2C5_SCL)**
-
-```bash
-ls /sys/bus/pci/devices/*/i2c_designware.1/ | grep i2c
-```
-
-
-
-And to detect peripherals connected to **I2C channel 0** do the following command:
-
-```bash
-sudo apt install i2c-tools
-sudo i2cdetect -r -y 0
-```
-
-
-
-**Note:** For I2C Channel 1, change the last argument 0 to 1.
-
-## SPI
-
-SPI devices can be identified by running the following command:
-
-```bash
-ls /sys/bus/pci/devices/0000\:00\:19.*/pxa2xx-spi.*/spi_master/ | grep spi
-```
-
-
-
-
-
-### Enabling SPI in Userspace
-
-To enable SPI devices access by users, please follow the belowings:
-
-1. Download the [zip file here](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SPI-Enable.zip) and un-zip to your local drive.
-
-2. Go into the directory that you un-zipped the file:
-
-```bash
-chmod +x acpi-add acpi-upgrades install_hooks
-sudo ./install_hooks && sudo acpi-add spidev*
-```
-
-3. Reboot your ODYSSEY - X86J41x5.
-
-Now you will be able to check SPI devices inside `/dev`
-
-```bash
-ls /dev/spi*
-```
-
-
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Accessing 40-pin GPIO
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-GPIO
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 03/16/2023
+ author: Lakshantha
+---
+
+# Accessing and Controlling ODYSSEY - X86J41x5 40-Pin GPIO
+
+This tutorial demonstrates how to access and control the 40-pin GPIO of ODYSSEY - X86J41x5 under Linux (Ubuntu). With this, you can start to build your IoT projects using [ODYSSEY - X86J41x5](https://www.seeedstudio.com/ODYSSEY-X86J4105800-p-4445.html) with ease!
+
+## 40-Pin GPIO Pinout Diagram
+
+### Ubuntu 18.04
+
+
Linux GPIO
Function
RPi GPIO
Pin No.
Pin No.
RPi GPIO
Function
Linux GPIO
3.3V
1
2
5V
386
I2C5_SDA
BCM2_SDA
3
4
5V
387
I2C5_SCL
BCM3_SCL
5
6
GROUND
337
BCM4
7
8
BCM14_TXD
493
UART0_TXD
GROUND
9
10
BCM15_RXD
492
UART0_RXD
364
BCM17
11
12
BCM18
338
412
BCM27
13
14
GROUND
413
BCM22
15
16
BCM23
421
3.3V
17
18
BCM24
422
359
SPI0_MOSI
BCM10_MOSI
19
20
GROUND
358
SPI0_MISO
BCM9_MISO
21
22
BCM25
390
355
SPI0_CLK
BCM11_SCLK
23
24
BCM8_CE0
356
SPI0_FSO
GROUND
25
26
BCM7_CE1
357
SPI0_FS1
388
I2C6_SDA
BCM0_ID_SD
27
28
BCM1_ID_SCL
389
I2C6_SCL
415
BCM5
29
30
GROUND
416
BCM6
31
32
BCM12
391
417
BCM13
33
34
GROUND
339
BCM19
35
36
BCM16
410
419
BCM26
37
38
BCM20
340
GROUND
39
40
BCM21
341
+
+---
+
Pin Legend
GPIO
UART
I2C
SPI
+
+### Ubuntu 20.04
+
+
+
+### Ubuntu 22.04
+
+
+
+## GPIO
+
+**The default pins on the ODYSSEY - X86J41x5 are configured to function mode so for example the pin 3 is set to I2C at default instead of GPIO mode. If you preferde using GPIO at default please check below.**
+
+:::note
+The 40-Pin GPIO has been equipped with bidirectional level conversion, and the current must not exceed 1 mA when in use. This means that the IO current is quite low.
+:::
+
+You can use the GPIO or change the function mode pin to GPIO using the Linux sysfs GPIO interface. Let's take pin 7 for example, the following code will turn on a LED module connected to Pin 7:
+
+```bash
+sudo -i
+cd /sys/class/gpio
+echo 337 > export
+cd gpio337
+echo "out" > direction
+echo 1 > value
+```
+
+
+
+
+
+To switch the LED off:
+
+```bash
+echo 0 > value
+```
+
+After finishing with using the GPIO, need to unexport it:
+
+```bash
+echo "in" > direction
+cd ..
+echo 337 > unexport
+```
+
+### Interrupts
+
+To test interrupts on ODYSSEY - X86J41x5, please follow the instructions below:
+
+Here I used the [python-periphery](https://github.com/vsergeev/python-periphery) to access GPIO interface in userspace Linux (Linux GPIO numbering).
+
+- Install python3-pip.
+
+```bash
+sudo apt install python3-pip
+```
+
+- Install [python-periphery](https://github.com/vsergeev/python-periphery).
+
+```bash
+sudo pip3 install python-periphery
+```
+
+1. Download the [IRQtest](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/IRQtest.zip) test script to your local drive.
+
+2. Change the directory to where the downloaded script is and run the test script:
+
+```bash
+sudo python3 IRQtest.py
+```
+
+
+
+
+
+### Changing pins to default GPIO mode
+
+If you prefer 40-pin to be in default GPIO, you can do this by changing setting in the BIOS.
+
+1. Reboot your ODYSSEY - X86J41x5 and keep pressing **DEL** key while booting up to enter BIOS menu.
+
+2. Navigate to **Advanced** -> **HAT Configuration**.
+
+3. Change function GPIO to GPIO mode as you preferred!
+
+
+
+
+
+**Note:** You can also set other GPIO to output by default.
+
+### Using Grove Base Hat for Simple Control
+
+You can also use Grove Base Hat for Raspberry Pi for simple digital signals. I.e. The I2C and UART ports cannot be used for now (The firmware of Grove Base Hat for Odyssey-X86 is being developed, and will be released very soon).
+
+Let's take **`D5`** port on Grove Base Hat for example:
+
+**Note:** This is referring to the Raspberry Pi's BCM numbering system -> **`BCM5`**. So for now to use for Odyssey-X86, need to figure out its physical pins, which is actually physical **Pin No. `29`**. *Refernece: [Raspberry Pinouts](https://pinout.xyz/)*.
+
+So the physical pins for using D5 on the Grove Base Hat connected to Odyssey-X86 is 29 which is the linux GPIO **`415`**.
+
+Now, we can use the same methods as above to control this GPIO:
+
+```bash
+sudo -i
+cd /sys/class/gpio
+echo 415 > export
+cd gpio415
+echo "out" > direction
+echo 1 > value
+```
+
+
+
+To unexport, follow the same steps as before.
+
+## UART
+
+To check the UART devices on ODYSSEY - X86J41x5, please run the following command:
+
+```bash
+ls /sys/bus/pci/devices/0000\:00\:18.?/dw-apb-uart.*/tty/ | grep tty
+```
+
+
+
+The **`ttyS4`** is associated with the UART Pin on the 40-pin header (**Pin 8 and Pin 10**). To access from these pins, please follow:
+
+```bash
+sudo apt install screen
+sudo screen /dev/ttyS4/ 115200
+```
+
+## I2C
+
+:::note
+ The Default I2C Speed for ODYSSEY - X86J41x5 is 1MB/s, which cannot be configured.
+:::
+
+To identify I2C ports on ODYSSEY - X86J41x5, you can execute the following command:
+
+- **i2c_designware.0** -> I2C channel on **Pin 27 and 28 (I2C6_SDA and I2C6_SCL)**
+
+```bash
+ls /sys/bus/pci/devices/*/i2c_designware.0/ | grep i2c
+```
+
+- **i2c_designware.1** -> I2C channel on **Pin 3 and 5 (I2C5_SDA and I2C5_SCL)**
+
+```bash
+ls /sys/bus/pci/devices/*/i2c_designware.1/ | grep i2c
+```
+
+
+
+And to detect peripherals connected to **I2C channel 0** do the following command:
+
+```bash
+sudo apt install i2c-tools
+sudo i2cdetect -r -y 0
+```
+
+
+
+**Note:** For I2C Channel 1, change the last argument 0 to 1.
+
+## SPI
+
+SPI devices can be identified by running the following command:
+
+```bash
+ls /sys/bus/pci/devices/0000\:00\:19.*/pxa2xx-spi.*/spi_master/ | grep spi
+```
+
+
+
+
+
+### Enabling SPI in Userspace
+
+To enable SPI devices access by users, please follow the belowings:
+
+1. Download the [zip file here](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SPI-Enable.zip) and un-zip to your local drive.
+
+2. Go into the directory that you un-zipped the file:
+
+```bash
+chmod +x acpi-add acpi-upgrades install_hooks
+sudo ./install_hooks && sudo acpi-add spidev*
+```
+
+3. Reboot your ODYSSEY - X86J41x5.
+
+Now you will be able to check SPI devices inside `/dev`
+
+```bash
+ls /dev/spi*
+```
+
+
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-LTE-Module.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-LTE-Module.md
index e4fcab4131e32..08df66b6aeb01 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-LTE-Module.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/ODYSSEY-X86J4105-LTE-Module.md
@@ -1,127 +1,126 @@
----
-description: ODYSSEY - X86J41x5
-title: LTE Modules for ODYSSEY
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-LTE-Module
-sku: 113990854,113990855,113990856,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-
-This wiki will walk you through how to use the LTE module on ODYSSEY-X86 on both Windows and Linux OS. In this example, the LTE module is [Quectel EM06-E LTE Cat 6 M.2 Module](https://www.seeedstudio.com/Quectel-EM06-E-LTE-Cat6-Module-p-4567.html) which is in the M.2 form factor.
-
-On both OS, we will demonstrate how to use the **Hotspot** feature to enable Wi-Fi availability to convert 4G LTE to Wi-Fi signals making it ODYSSEY-X86 a simple **4G Wi-Fi Router** with ease!
-
-## Hardware Connection
-
-- Connect the LTE module to the M.2 Connector of ODYSSEY-X86:
-
-
-
-- Connect the 4G SIM card to the slot.
-
-- Connect the Antennas to the LTE module.
-
-## Configurations
-
-The Quectel EM06-E LTE Cat 6 M.2 Module has USB drivers for Windows 7/8/8.1/10, Linux and Android, DFOTA, etc. This makes it very convenient to get started, and without the need of installing drivers.
-
-### Windows
-
-Once connected the LTE module and booted Windows. It should automatically install the USB drivers and ready to use:
-
-
-
-### Wi-Fi Hotspot under Windows
-
-Once it's connected to the Internet with the LTE module, you can use the Hotspot feature from Windows to create a Wi-Fi:
-
-
-
-:::note
-Make sure that the Intel Network card also has antennas connected on it.
-:::
-
-### Linux
-
-For Linux, it is also very simple. Run the broadband configurations:
-
-:::note
- Ubuntu 18.04 is used for reference.
-:::
-
-
-
-Choose the Country Region and select your network provider:
-
-
-Choose your plan (Default):
-
-
-
-Confirm details and click apply:
-
-
-
-Now, the LTE module is all done and can use to browse Internet!
-
-
-
-### Wi-Fi Hotspot under Linux
-
-For Linux, you can also create Wi-Fi Hotspot using the 4G network. This following is ran under ubuntu.
-
-- Open Network settings in ubuntu, run the following command in terminal:
-
-```sh
-nm-connection-editor
-```
-
-The following window will appear:
-
-
-
-- Select `Wi-Fi` as connection type:
-
-
-
-- Configure Wi-Fi settings as follow, make sure that **mode** is `Hotspot`:
-
-
-
-
-
-
-
-
-
-- For the Wi-Fi to be identified by other device, you must connect the Wi-Fi by itself. Under Wi-Fi, select `Connect To Hidden Network`. Choose the network that we just created, and connect.
-
-
-
-
-
-
-
-- Now, the Wi-Fi is available for connections!
-
-## Reference
-
-- [How Fast is 5G On The ODYSSEY – X86J41x5 | 5G Speed Test](https://blog.seeedstudio.com/blog/2020/06/15/how-fast-is-5g-on-the-odyssey-x86j4105-5g-speed-test-m/)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: LTE Modules for ODYSSEY
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-LTE-Module
+sku: 113990854,113990855,113990856,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+
+This wiki will walk you through how to use the LTE module on ODYSSEY-X86 on both Windows and Linux OS. In this example, the LTE module is [Quectel EM06-E LTE Cat 6 M.2 Module](https://www.seeedstudio.com/Quectel-EM06-E-LTE-Cat6-Module-p-4567.html) which is in the M.2 form factor.
+
+On both OS, we will demonstrate how to use the **Hotspot** feature to enable Wi-Fi availability to convert 4G LTE to Wi-Fi signals making it ODYSSEY-X86 a simple **4G Wi-Fi Router** with ease!
+
+## Hardware Connection
+
+- Connect the LTE module to the M.2 Connector of ODYSSEY-X86:
+
+
+
+- Connect the 4G SIM card to the slot.
+
+- Connect the Antennas to the LTE module.
+
+## Configurations
+
+The Quectel EM06-E LTE Cat 6 M.2 Module has USB drivers for Windows 7/8/8.1/10, Linux and Android, DFOTA, etc. This makes it very convenient to get started, and without the need of installing drivers.
+
+### Windows
+
+Once connected the LTE module and booted Windows. It should automatically install the USB drivers and ready to use:
+
+
+
+### Wi-Fi Hotspot under Windows
+
+Once it's connected to the Internet with the LTE module, you can use the Hotspot feature from Windows to create a Wi-Fi:
+
+
+
+:::note
+Make sure that the Intel Network card also has antennas connected on it.
+:::
+
+### Linux
+
+For Linux, it is also very simple. Run the broadband configurations:
+
+:::note
+ Ubuntu 18.04 is used for reference.
+:::
+
+
+
+Choose the Country Region and select your network provider:
+
+
+Choose your plan (Default):
+
+
+
+Confirm details and click apply:
+
+
+
+Now, the LTE module is all done and can use to browse Internet!
+
+
+
+### Wi-Fi Hotspot under Linux
+
+For Linux, you can also create Wi-Fi Hotspot using the 4G network. This following is ran under ubuntu.
+
+- Open Network settings in ubuntu, run the following command in terminal:
+
+```sh
+nm-connection-editor
+```
+
+The following window will appear:
+
+
+
+- Select `Wi-Fi` as connection type:
+
+
+
+- Configure Wi-Fi settings as follow, make sure that **mode** is `Hotspot`:
+
+
+
+
+
+
+
+
+
+- For the Wi-Fi to be identified by other device, you must connect the Wi-Fi by itself. Under Wi-Fi, select `Connect To Hidden Network`. Choose the network that we just created, and connect.
+
+
+
+
+
+
+
+- Now, the Wi-Fi is available for connections!
+
+## Reference
+
+- [How Fast is 5G On The ODYSSEY – X86J41x5 | 5G Speed Test](https://blog.seeedstudio.com/blog/2020/06/15/how-fast-is-5g-on-the-odyssey-x86j4105-5g-speed-test-m/)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-This tutorial demonstrates how to install the Android-x86 on the ODYSSEY-X86J41x5 and use it as a smart TV box to watch live stream TV or media from local storage(such as NAS) with the help of [Kodi](https://kodi.tv/).
-
-The Android-x86 is a project to port Android open source project to x86 platform, formerly known as "patch hosting for android x86 support". For more reference, please visit the official [Android-x86](https://www.android-x86.org/).
-
-## Hardware Requirements
-
-- A Working Computer
-
-- USB Drive x 1 (>= 8GB is recommended)
-
-- A Monitor
-
-- Keyboard
-
-## Download the Android-x86 OS Image
-
-First, download the [Android-x86 OS Image](https://www.android-x86.org/download.html) into your drive. It should be a `.iso` file.
-
-
-
-In this tutorial, `android-x86-7.1-r4-k419` is used.
-
-## Creating a Bootable USB
-
-### Step 1 - Prepare your Bootable USB
-
-Format one of the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
-
-**Note:** Choose `FAT32` for the File System.
-
-
-
-### Step 2 - Download Flash Burner
-
-Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
-
-
-
-### Step 3 - Writing the OS Image into USB
-
-Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
-
-
-
-## Installing the Android-x86
-
-### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
-
-Plugin your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
-
-
-
-### Step 2 - Install the OS
-
-Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB (Installer) and press Enter.
-
-**Note:** Remember to choose the one that has the Android-x86 iso image on it.
-
-
-
-Select `Android-x86** Auto Install to specific harddisk`:
-
-
-
-This goes into the installation process and you can choose where the Android-x86 is installed on ODYSSEY-X86. Here is installed onto the onboard eMMC.
-
-
-
-Select `Yes` for confirmation:
-
-
-
-Now, the installing process is taking place and once it's done, select `Reboot`:
-
-
-
-Take out the bootable USB and reboot the device. Android-x86 should be booted up.
-
-!!!Note
- If not booted up properly, please press F7 and select the drive you installed Android-x86 to boot from.
-
-## Configurations
-
-If everything goes well, you will booted into the Android-x86 like the screen below:
-
-
-
-This may look familiar with people who use Android phones!
-
-## Setting up as Smart TV Box
-
-To get ODYSSEY-X86J41x5 to work as a smart TV Box, we will need to install [Kodi](https://kodi.tv/).
-
-Kodi is a free, open source piece of media centre software that can run on anything from your Android phone to your home PC, and plenty of other devices in between. And of course it supports Android-x86!
-
-### Download and Install KODI for Android-x86
-
-You can download the [Kodi for Android-x86 here](https://mirrors.kodi.tv/releases/android/x86/). You may want to download it from another PC and save the `.apk` file into a USB drive and install the app from USB.
-
-### Kodi IPTV Settings
-
-Open **Kodi** and navigate to **TV** -> **More Add-on**:
-
-
-
-Choose **PVR clients**:
-
-
-
-Select **PVR IPTV Simple Client**:
-
-
-
-Select **configure** and type in the **IPTV streaming `m3u` url**. You may check this [`iptv repo`](https://github.com/iptv-org/iptv/blob/master/README.md) for reference. Select **OK** and remember to **enable**.
-
-
-
-REboot the Kodi and you should have channels loaded! Now you have truned your ODYSSEY-X86 into a Smart TV Box!
-
-
-
-### Boot from Start-up
-
-If you want the ODYSSEY-X86 to boot Kodi from boot up, you can simply achieve this by installing `Boot apps` from the Google Play Store!
-
-
-
-Install the app and select Kodi as boot from start apps!
-
-## Resources
-
-- [Kodi](https://kodi.tv/)
-
-- [How To Use Kodi – Everything You Need To Know for Unlimited Streaming](https://troypoint.com/how-to-use-kodi/)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+This tutorial demonstrates how to install the Android-x86 on the ODYSSEY-X86J41x5 and use it as a smart TV box to watch live stream TV or media from local storage(such as NAS) with the help of [Kodi](https://kodi.tv/).
+
+The Android-x86 is a project to port Android open source project to x86 platform, formerly known as "patch hosting for android x86 support". For more reference, please visit the official [Android-x86](https://www.android-x86.org/).
+
+## Hardware Requirements
+
+- A Working Computer
+
+- USB Drive x 1 (>= 8GB is recommended)
+
+- A Monitor
+
+- Keyboard
+
+## Download the Android-x86 OS Image
+
+First, download the [Android-x86 OS Image](https://www.android-x86.org/download.html) into your drive. It should be a `.iso` file.
+
+
+
+In this tutorial, `android-x86-7.1-r4-k419` is used.
+
+## Creating a Bootable USB
+
+### Step 1 - Prepare your Bootable USB
+
+Format one of the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
+
+**Note:** Choose `FAT32` for the File System.
+
+
+
+### Step 2 - Download Flash Burner
+
+Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
+
+
+
+### Step 3 - Writing the OS Image into USB
+
+Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
+
+
+
+## Installing the Android-x86
+
+### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
+
+Plugin your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
+
+
+
+### Step 2 - Install the OS
+
+Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB (Installer) and press Enter.
+
+**Note:** Remember to choose the one that has the Android-x86 iso image on it.
+
+
+
+Select `Android-x86** Auto Install to specific harddisk`:
+
+
+
+This goes into the installation process and you can choose where the Android-x86 is installed on ODYSSEY-X86. Here is installed onto the onboard eMMC.
+
+
+
+Select `Yes` for confirmation:
+
+
+
+Now, the installing process is taking place and once it's done, select `Reboot`:
+
+
+
+Take out the bootable USB and reboot the device. Android-x86 should be booted up.
+
+!!!Note
+ If not booted up properly, please press F7 and select the drive you installed Android-x86 to boot from.
+
+## Configurations
+
+If everything goes well, you will booted into the Android-x86 like the screen below:
+
+
+
+This may look familiar with people who use Android phones!
+
+## Setting up as Smart TV Box
+
+To get ODYSSEY-X86J41x5 to work as a smart TV Box, we will need to install [Kodi](https://kodi.tv/).
+
+Kodi is a free, open source piece of media centre software that can run on anything from your Android phone to your home PC, and plenty of other devices in between. And of course it supports Android-x86!
+
+### Download and Install KODI for Android-x86
+
+You can download the [Kodi for Android-x86 here](https://mirrors.kodi.tv/releases/android/x86/). You may want to download it from another PC and save the `.apk` file into a USB drive and install the app from USB.
+
+### Kodi IPTV Settings
+
+Open **Kodi** and navigate to **TV** -> **More Add-on**:
+
+
+
+Choose **PVR clients**:
+
+
+
+Select **PVR IPTV Simple Client**:
+
+
+
+Select **configure** and type in the **IPTV streaming `m3u` url**. You may check this [`iptv repo`](https://github.com/iptv-org/iptv/blob/master/README.md) for reference. Select **OK** and remember to **enable**.
+
+
+
+REboot the Kodi and you should have channels loaded! Now you have truned your ODYSSEY-X86 into a Smart TV Box!
+
+
+
+### Boot from Start-up
+
+If you want the ODYSSEY-X86 to boot Kodi from boot up, you can simply achieve this by installing `Boot apps` from the Google Play Store!
+
+
+
+Install the app and select Kodi as boot from start apps!
+
+## Resources
+
+- [Kodi](https://kodi.tv/)
+
+- [How To Use Kodi – Everything You Need To Know for Unlimited Streaming](https://troypoint.com/how-to-use-kodi/)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-FreeNAS.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-FreeNAS.md
index 8f325e6d8d791..acf7c9974dd2d 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-FreeNAS.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-FreeNAS.md
@@ -1,183 +1,182 @@
----
-description: ODYSSEY - X86J41x5
-title: FreeNAS Installation
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-Installing-FreeNAS
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-
-
-This tutorial demonstrates how to install the open-source Storage operating system. [FreeNAS](https://www.freenas.org/) is an operating system that can be installed on virtually any hardware platform to share data over a network. By installing FreeNAS on ODYSSEY - X86J41x5 you have built yourself a personal cloud drive!
-
-## Hardware Requirements
-
-- A Working Computer
-
-- USB Drive x 2 (>= 8GB is recommended)
-
-- A Monitor
-
-- Keyboard
-
-## Download the FreeNAS OS Image
-
-First, download the [FreeNAS OS Image](https://www.freenas.org/download-freenas-release/) into your drive. It should be a `.iso` file.
-
-
-
-In this tutorial, FreeNAS 11.3 is used. FreeNAS will need to install on a different drive. You can install the FreeNAS on an HDD or SSD Hard Drive.
-
-**Note:** In this tutorial, FreeNAS OS is installed onto a USB drive for convenience.
-
-## Creating a Bootable USB
-
-### Step 1 - Prepare your Bootable USB
-
-Format one of the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
-
-**Note:** Choose `FAT32` for the File System.
-
-
-
-### Step 2 - Download Flash Burner
-
-Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
-
-
-
-### Step 3 - Writing the OS Image into USB
-
-Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
-
-
-
-## Installing FreeNAS OS
-
-### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
-
-Plugin your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
-
-
-
-### Step 2 - Install the OS
-
-Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB (Installer) and press Enter.
-
-**Note:** Remember to choose the one that has the FreeNAS iso image on it.
-
-
-
-### Step 3 - Installing process
-
-
-
-A boot screen like above should appear. Press `Enter` to select the Boot FreeNAS Installer.
-
-
-
-Once entered into the installer, an options menu should appear as follow, select **Install/Select** and press `Enter`.
-
-
-
-Select a drive to install the FreeNAS image. Here we should be able to see the other USB drive.
-
-**Note:** Use `spacebar` to select the USB drive.
-
-
-
-A warning will appear stating that everything in the chosen drive will be wiped, simply press Yes.
-
-
-
-Create your root password for logging into the FreeNAS from Web interface later.
-
-
-
-The installing process will take place, and wait until the installing is finished. When it's done, it should like above.
-
-The installing process is all done, you can reboot the ODYSSEY - X86J41x5 and unplug the bootable USB(Installer).
-
-Plug in the Ethernet cable for internet and can be accessed to the Web interface.
-
-## Configurations
-
-Reboot the ODYSSEY - X86J41x5 and press `F7` again to enter Boot Manager Screen, and choose the USB drive that just installed the FreeNAS.
-
-**Note:** Can also change it in the set-up by pressing `DEL` and set the USB drive as the first boot-up option.
-
-Once booted into the FreeNAS, you should see the Web interface address:
-
-
-
-**Note:** If states Web interface cannot be accessed, please check your internet connection.
-
-Use another computer using the same internet i.e. your laptop to type the address into the web browser:
-
-
-
-The user name is `root` and the password is the one set during installation.
-
-
-
-If you able see this screen then you have successfully installed the FreeNAS and feel free to add more storage to the ODYSSEY - X86J41x5 and have fun with personal cloud drive!
-
-*For further development, you can visit the [FreeNAS official Forum](https://www.ixsystems.com/community/?__hstc=54333623.367bb0a280861850367fe7c0081ee5de.1582628751612.1582693495900.1582699340011.3&__hssc=54333623.1.1582699340011&__hsfp=3609375136) and find out more about plugins and features*
-
-## Acrylic Case
-
-We have also designed an Acrylic Case for building your own NAS into a enclosure! Here provides two versions of enclosure depending on the size of your hard drive:
-
-1. For [**2.5 inches of SATA HDD**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/J4105-2.5.dwg) Hard Drive.
-
-2. For [**3.5 inches of SATA HDD**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/J4105-3.5.dwg) Hard Drive.
-
-**Materials Required:**
-
-- 3mm Acrylics sheets
-
-- M3 x 20mm Hexagon Female-Female Threaded Pillar x 4
-
-- M3 x 40mm Hexagon Female-Female Threaded Pillar x 4 (or use M3 x 20mm to stack up to 40mm)
-
-- M3 Screws
-
-## Resources
-
-- Explaining Computers Video on FreeNAS on Odyssey-X86:
-
-
-
-
-
-Other useful applications:
-
-- [Getting Started With FreeNAS 11 Install, Configure, Setup Users, Setup Shares & How Snapshots Work](https://www.youtube.com/watch?v=sMZ-s8wHkHw&list=PLMeX7dgR89SvzGW0eumZuP_LAeBGEDnBb&index=11)
-
-- [How to set up a home file server using FreeNAS](https://www.windowscentral.com/how-to-set-up-freenas-home-file-server)
-
-- [Backing Up FreeNAS and TrueNAS to Backblaze B2](https://www.backblaze.com/blog/how-to-setup-freenas-cloud-storage/)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: FreeNAS Installation
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-Installing-FreeNAS
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+
+
+This tutorial demonstrates how to install the open-source Storage operating system. [FreeNAS](https://www.freenas.org/) is an operating system that can be installed on virtually any hardware platform to share data over a network. By installing FreeNAS on ODYSSEY - X86J41x5 you have built yourself a personal cloud drive!
+
+## Hardware Requirements
+
+- A Working Computer
+
+- USB Drive x 2 (>= 8GB is recommended)
+
+- A Monitor
+
+- Keyboard
+
+## Download the FreeNAS OS Image
+
+First, download the [FreeNAS OS Image](https://www.freenas.org/download-freenas-release/) into your drive. It should be a `.iso` file.
+
+
+
+In this tutorial, FreeNAS 11.3 is used. FreeNAS will need to install on a different drive. You can install the FreeNAS on an HDD or SSD Hard Drive.
+
+**Note:** In this tutorial, FreeNAS OS is installed onto a USB drive for convenience.
+
+## Creating a Bootable USB
+
+### Step 1 - Prepare your Bootable USB
+
+Format one of the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
+
+**Note:** Choose `FAT32` for the File System.
+
+
+
+### Step 2 - Download Flash Burner
+
+Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
+
+
+
+### Step 3 - Writing the OS Image into USB
+
+Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
+
+
+
+## Installing FreeNAS OS
+
+### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
+
+Plugin your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
+
+
+
+### Step 2 - Install the OS
+
+Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB (Installer) and press Enter.
+
+**Note:** Remember to choose the one that has the FreeNAS iso image on it.
+
+
+
+### Step 3 - Installing process
+
+
+
+A boot screen like above should appear. Press `Enter` to select the Boot FreeNAS Installer.
+
+
+
+Once entered into the installer, an options menu should appear as follow, select **Install/Select** and press `Enter`.
+
+
+
+Select a drive to install the FreeNAS image. Here we should be able to see the other USB drive.
+
+**Note:** Use `spacebar` to select the USB drive.
+
+
+
+A warning will appear stating that everything in the chosen drive will be wiped, simply press Yes.
+
+
+
+Create your root password for logging into the FreeNAS from Web interface later.
+
+
+
+The installing process will take place, and wait until the installing is finished. When it's done, it should like above.
+
+The installing process is all done, you can reboot the ODYSSEY - X86J41x5 and unplug the bootable USB(Installer).
+
+Plug in the Ethernet cable for internet and can be accessed to the Web interface.
+
+## Configurations
+
+Reboot the ODYSSEY - X86J41x5 and press `F7` again to enter Boot Manager Screen, and choose the USB drive that just installed the FreeNAS.
+
+**Note:** Can also change it in the set-up by pressing `DEL` and set the USB drive as the first boot-up option.
+
+Once booted into the FreeNAS, you should see the Web interface address:
+
+
+
+**Note:** If states Web interface cannot be accessed, please check your internet connection.
+
+Use another computer using the same internet i.e. your laptop to type the address into the web browser:
+
+
+
+The user name is `root` and the password is the one set during installation.
+
+
+
+If you able see this screen then you have successfully installed the FreeNAS and feel free to add more storage to the ODYSSEY - X86J41x5 and have fun with personal cloud drive!
+
+*For further development, you can visit the [FreeNAS official Forum](https://www.ixsystems.com/community/?__hstc=54333623.367bb0a280861850367fe7c0081ee5de.1582628751612.1582693495900.1582699340011.3&__hssc=54333623.1.1582699340011&__hsfp=3609375136) and find out more about plugins and features*
+
+## Acrylic Case
+
+We have also designed an Acrylic Case for building your own NAS into a enclosure! Here provides two versions of enclosure depending on the size of your hard drive:
+
+1. For [**2.5 inches of SATA HDD**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/J4105-2.5.dwg) Hard Drive.
+
+2. For [**3.5 inches of SATA HDD**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/J4105-3.5.dwg) Hard Drive.
+
+**Materials Required:**
+
+- 3mm Acrylics sheets
+
+- M3 x 20mm Hexagon Female-Female Threaded Pillar x 4
+
+- M3 x 40mm Hexagon Female-Female Threaded Pillar x 4 (or use M3 x 20mm to stack up to 40mm)
+
+- M3 Screws
+
+## Resources
+
+- Explaining Computers Video on FreeNAS on Odyssey-X86:
+
+
+
+
+
+Other useful applications:
+
+- [Getting Started With FreeNAS 11 Install, Configure, Setup Users, Setup Shares & How Snapshots Work](https://www.youtube.com/watch?v=sMZ-s8wHkHw&list=PLMeX7dgR89SvzGW0eumZuP_LAeBGEDnBb&index=11)
+
+- [How to set up a home file server using FreeNAS](https://www.windowscentral.com/how-to-set-up-freenas-home-file-server)
+
+- [Backing Up FreeNAS and TrueNAS to Backblaze B2](https://www.backblaze.com/blog/how-to-setup-freenas-cloud-storage/)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-OS.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-OS.md
index 0a7445f9b505e..8c7c44a52c4a7 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-OS.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-OS.md
@@ -1,101 +1,100 @@
----
-description: ODYSSEY - X86J41x5
-title: Original OS
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-Installing-OS
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-
-
-This tutorial demonstrates how to create a bootable USB drive and install Linux OS(Ubuntu Desktop 18.04) onto the ODYSSEY - X86J41x5.
-
-## Hardware Requirements
-
-- A Working Computer
-
-- A USB Drive(>= 8GB is recommended)
-
-- A Monitor
-
-- Keyboard and Mouse
-
-## Creating a Bootable USB
-
-### Step 1 - Download the Operating System Image
-
-Download your required OS Image to your local drive. In this tutorial, *Ubuntu Desktop 18.04* is used to demonstrate to install into the ODYSSEY - X86J41x5.
-
-- You can download [Ubuntu](https://ubuntu.com/download/desktop) OS Image from here.
-
-### Step 2 - Prepare your Bootable USB
-
-Format the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
-
-**Note:** Choose `FAT32` for the File System.
-
-
-
-### Step 3 - Download Flash Burner
-
-Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
-
-
-
-### Step 4 - Writing the OS Image into USB
-
-Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
-
-
-
-## Installing Operating System (Ubuntu)
-
-### Step 1 - Selecting Bootable USB as Boot Device
-
-Plug in your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`F7`** to enter the Boot Manager Screen. And use ↑ and ↓ Key on keyboard to select your bootable USB.
-
-In this Tutorial, `UEFI: Mass Storage Device 1.00` is the bootable USB.
-
-
-
-### Step 2 - Installing the OS
-
-Select the **`Install ubuntu`** and press Enter. Follow through the installing instructions on the screen, i.e. system language, user name, location and etc.
-
-**Note:** For detail steps of Installing ubuntu, you can follow [this](https://www.youtube.com/watch?v=vt5Lu_ltPkU) video for more information. *The Installing part starts at 3:20 in the video.*
-
-
-
-### Step 3 - Reboot and Enjoy New OS
-
-If everything goes well, ubuntu should be installed on the ODYSSEY - X86J41x5 and you can start enjoying your new OS!
-
-
-
-## Notes
-
-- **Ubuntu 16 is not supported by ODYSSEY - X86J41x5**
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Original OS
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-Installing-OS
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+
+
+This tutorial demonstrates how to create a bootable USB drive and install Linux OS(Ubuntu Desktop 18.04) onto the ODYSSEY - X86J41x5.
+
+## Hardware Requirements
+
+- A Working Computer
+
+- A USB Drive(>= 8GB is recommended)
+
+- A Monitor
+
+- Keyboard and Mouse
+
+## Creating a Bootable USB
+
+### Step 1 - Download the Operating System Image
+
+Download your required OS Image to your local drive. In this tutorial, *Ubuntu Desktop 18.04* is used to demonstrate to install into the ODYSSEY - X86J41x5.
+
+- You can download [Ubuntu](https://ubuntu.com/download/desktop) OS Image from here.
+
+### Step 2 - Prepare your Bootable USB
+
+Format the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
+
+**Note:** Choose `FAT32` for the File System.
+
+
+
+### Step 3 - Download Flash Burner
+
+Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
+
+
+
+### Step 4 - Writing the OS Image into USB
+
+Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
+
+
+
+## Installing Operating System (Ubuntu)
+
+### Step 1 - Selecting Bootable USB as Boot Device
+
+Plug in your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`F7`** to enter the Boot Manager Screen. And use ↑ and ↓ Key on keyboard to select your bootable USB.
+
+In this Tutorial, `UEFI: Mass Storage Device 1.00` is the bootable USB.
+
+
+
+### Step 2 - Installing the OS
+
+Select the **`Install ubuntu`** and press Enter. Follow through the installing instructions on the screen, i.e. system language, user name, location and etc.
+
+**Note:** For detail steps of Installing ubuntu, you can follow [this](https://www.youtube.com/watch?v=vt5Lu_ltPkU) video for more information. *The Installing part starts at 3:20 in the video.*
+
+
+
+### Step 3 - Reboot and Enjoy New OS
+
+If everything goes well, ubuntu should be installed on the ODYSSEY - X86J41x5 and you can start enjoying your new OS!
+
+
+
+## Notes
+
+- **Ubuntu 16 is not supported by ODYSSEY - X86J41x5**
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-openwrt.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-openwrt.md
index 14b0a7c8bebf3..69fed57bf09c8 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-openwrt.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Installing-openwrt.md
@@ -1,142 +1,141 @@
----
-description: ODYSSEY - X86J41x5
-title: OpenWRT Installation
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-Installing-openwrt
-sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-
-
-This tutorial demonstrates how to install the open source OS for router network. With the help of OpenWrt, your ODYSSEY - X86J41x5 can turn into a router and take care of your home network!
-
-## Hardware Requirements
-
-- A Working Computer
-
-- A USB Drive(>= 8GB is recommended)
-
-- A Monitor
-
-- Keyboard and Mouse
-
-- Ethernet Cable x 2
-
-## Download the OpenWrt OS Image
-
-First, download the [OpenWrt](https://downloads.openwrt.org/releases/) OS image. Choose the version you wanted, navigate to `x86` -> `64` and download your required version.
-
-In this tutorial, 19.07 version is used and click [here](https://downloads.openwrt.org/releases/19.07.0/targets/x86/64/openwrt-19.07.0-x86-64-combined-ext4.img.gz) to download.
-
-
-
-## Creating a Bootable USB
-
-### Step 1 - Prepare your Bootable USB
-
-Format the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
-
-**Note:** Choose `FAT32` for the File System.
-
-
-
-### Step 2 - Download Flash Burner
-
-Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
-
-
-
-### Step 3 - Writing the OS Image into USB
-
-Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
-
-
-
-## Installing OpenWrt
-
-### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
-
-Plug in your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup Screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
-
-
-
-### Step 2 - Install the OS
-
-Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB and press Enter.
-
-
-
-### Step 3 - Installing process
-
-Select the **`OpenWrt`** and press Enter. Follow through the installing instructions on the screen.
-
-
-When it's done, press Enter and you should see the screen as follow:
-
-
-
-Now your OpenWrt is installed and ready to be used!
-
-## Configurations
-
-Now, let's configure to access to the OpenWrt system from a web interface from another PC. Enter the following in the shell in OpenWrt:
-
-```sh
-vi /etc/config/network
-```
-
-And change the settings to as follow:
-
-
-
-Where you change the station IP address for LAN configurations so that you can use this IP to access to router. Here the IP is changed to `192.168.10.1`
-
-**Note:** In vim, type **`i`** first to be insert mode so that you can edit. When done with editing, press **`ESC`** key and type **`:wq`** and enter to save and quit.
-
-## Accessing from Another PC
-
-Now, you can access the OpenWrt from another computer via LuCI web interface. Simply, use **a Ethernet cable to connect Ethernet Port that is close to the HDMI port**. Connect the other ethernet cable to the other Ethernet port on ODYSSEY - X86J41x5 and to the internet(This may be varied such as PPPoE method).
-
-Now, from your computer, type `192.168.10.1` (The IP address specified earlier) in the web browser and you should see the following screen:
-
-
-
-Now, you can access your OpenWrt from another PC!
-
-## Configuring LAN and WAN
-
-Navigate to **`Network`** -> **`Interfaces`** and configure WAN settings for internet access:
-
-
-
- This shows the all the interfaces settings for OpenWrt. Here, simply make sure the the **WAN(eth1) port** is connected to the internet and is set to **DHCP client Protocol** as follow:
-
-
-
- Now, your computer should access to the internet and your router is set to go!
-
- *For further development, you can start downloading and deploying all sort of applications such as Ad block, port mirroring and etc! For more, please visit [OpenWrt](https://openwrt.org/).*
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: OpenWRT Installation
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-Installing-openwrt
+sku: 102110399,102110398,102110397,110991412,110991465,102110477,102110478,102110479
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+
+
+This tutorial demonstrates how to install the open source OS for router network. With the help of OpenWrt, your ODYSSEY - X86J41x5 can turn into a router and take care of your home network!
+
+## Hardware Requirements
+
+- A Working Computer
+
+- A USB Drive(>= 8GB is recommended)
+
+- A Monitor
+
+- Keyboard and Mouse
+
+- Ethernet Cable x 2
+
+## Download the OpenWrt OS Image
+
+First, download the [OpenWrt](https://downloads.openwrt.org/releases/) OS image. Choose the version you wanted, navigate to `x86` -> `64` and download your required version.
+
+In this tutorial, 19.07 version is used and click [here](https://downloads.openwrt.org/releases/19.07.0/targets/x86/64/openwrt-19.07.0-x86-64-combined-ext4.img.gz) to download.
+
+
+
+## Creating a Bootable USB
+
+### Step 1 - Prepare your Bootable USB
+
+Format the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
+
+**Note:** Choose `FAT32` for the File System.
+
+
+
+### Step 2 - Download Flash Burner
+
+Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
+
+
+
+### Step 3 - Writing the OS Image into USB
+
+Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
+
+
+
+## Installing OpenWrt
+
+### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
+
+Plug in your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup Screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
+
+
+
+### Step 2 - Install the OS
+
+Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB and press Enter.
+
+
+
+### Step 3 - Installing process
+
+Select the **`OpenWrt`** and press Enter. Follow through the installing instructions on the screen.
+
+
+When it's done, press Enter and you should see the screen as follow:
+
+
+
+Now your OpenWrt is installed and ready to be used!
+
+## Configurations
+
+Now, let's configure to access to the OpenWrt system from a web interface from another PC. Enter the following in the shell in OpenWrt:
+
+```sh
+vi /etc/config/network
+```
+
+And change the settings to as follow:
+
+
+
+Where you change the station IP address for LAN configurations so that you can use this IP to access to router. Here the IP is changed to `192.168.10.1`
+
+**Note:** In vim, type **`i`** first to be insert mode so that you can edit. When done with editing, press **`ESC`** key and type **`:wq`** and enter to save and quit.
+
+## Accessing from Another PC
+
+Now, you can access the OpenWrt from another computer via LuCI web interface. Simply, use **a Ethernet cable to connect Ethernet Port that is close to the HDMI port**. Connect the other ethernet cable to the other Ethernet port on ODYSSEY - X86J41x5 and to the internet(This may be varied such as PPPoE method).
+
+Now, from your computer, type `192.168.10.1` (The IP address specified earlier) in the web browser and you should see the following screen:
+
+
+
+Now, you can access your OpenWrt from another PC!
+
+## Configuring LAN and WAN
+
+Navigate to **`Network`** -> **`Interfaces`** and configure WAN settings for internet access:
+
+
+
+ This shows the all the interfaces settings for OpenWrt. Here, simply make sure the the **WAN(eth1) port** is connected to the internet and is set to **DHCP client Protocol** as follow:
+
+
+
+ Now, your computer should access to the internet and your router is set to go!
+
+ *For further development, you can start downloading and deploying all sort of applications such as Ad block, port mirroring and etc! For more, please visit [OpenWrt](https://openwrt.org/).*
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Updating-Firmware.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Updating-Firmware.md
index 18012cb899ec3..b4d63ed365d77 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Updating-Firmware.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-Updating-Firmware.md
@@ -1,269 +1,268 @@
----
-description: ODYSSEY - X86J41x5
-title: Firmware Upgrade
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-Updating-Firmware
-last_update:
- date: 03/16/2023
- author: Lakshantha
-
----
-
-
-
-This tutorial demonstrates how to update the BIOS and EC (Embedded Controller) firmware for the ODYSSEY - X86.
-
-
-
-
-
PAY ATTENTION
-
As the provided firmware on the Wiki is supported to J4105/J4125-V1, updating the BIOS firmware from the Wiki on a J4125-V2 board will cause the board to brick. Please ensure that you have the correct version of ODYSSEY.
-
-
-
-## Hardware Requirements
-
-- A Working Computer
-
-- A USB Drive
-
-- A Monitor
-
-- A Keyboard
-
-## How to Upgrade the BIOS
-
-BIOS is also like an OS and can be upgraded to fix bugs and enhance performance of the ODYSSEY - X86J41x5. Here is the instruction how to upgrade the BIOS version on ODYSSEY - X86J41x5.
-
-### Current Latest BIOS Version and Changelog
-
-
-
-
-
Important Notes
-
1. It wipes the old BIOS settings, and so you would need to re-activate your Windows(if using Windows) again (wipes the activation key, needs Internet to activate again).
2. If you have the non-EMMC version of ODYSSEY-X86, before updating the BIOS, Please make sure to disable eMMC in the BIOS Settings Before and After the updates.
-
-
-
-> You may check in the BIOS main page for BIOS and EC Firmware's versions.
-
-
-
-### Latest BIOS Firmware
-
-
-
-
-
PAY ATTENTION
-
As the provided firmware on the Wiki is supported to J4105/J4125-V1, updating the BIOS firmware from the Wiki on a J4125-V2 board will cause the board to brick. Please ensure that you have the correct version of ODYSSEY.
-
-
-
-
-
-**[SD-BS-CJ41G-300-101-K 07/26/2022 15:00:00](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-K.zip)**
-
-- Improve overall stability.
-
-**Note:** If you want the above BIOS with **bifurcation feature enabled**, please contact techsupport@seeed.io
-
-With bifurcation feature, you will be able to use the M.2 M-Key for 4 PCIe x1. This enables you to connect four different PCIe x1 devices to the M.2 such as multiple network ports, multiple SSDs and other expansion devices. With the normal BIOS without bifurcation feature, M.2 M-Key can be used for only one PCIe x4.
-
->**History BIOS:**
-
-**[SD-BS-CJ41G-300-101-H 08/16/2021 15:00:00](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-H.zip)**
-
-- **SHA256:** 9ea30178b4ef8453c6f24f037b4b3352ac6d214c7c22f94985428bcb23a178c2
-
-- Improve overall stability.
-
-> **[SD-BS-CJ41G-300-101-F 04/16/2021 01:20:07](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-F.zip)**
-
-> - **SHA256:** 53711DBF9FB6ABE564BE1C7A870840F8B87CAA42239448869D87C08C1BDF0EC5
-
-> 1. Improve overall stability.
-
-> **[SD-BS-CJ41G-300-101-C 03/11/2021 16:28:07](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-C.zip)**
-
-> - **SHA256:** 12f4ce1ab81008525138fcd7d830e18dc13936f3ce4a51e17c314fc55debe480
-
-> 1. Fix bug: loads into other OS other than Windows when set to load others.
-
-> **[SD-BS-CJ41G-M-101-K 12/31/2020 20:34:37](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-M-101-K.zip)**
-
-> - **SHA256:** 7208d39c4f77a4837a0a1072dce45c7bc8feba28597522ea036778a9c09aa61a
-
-> 1. Added **Secure Boot**.
-> 2. Added **Wake on LAN**.
-> 3. Fix reboot into BIOS settings page under Linux environment (Eg. `systemctl reboot --firmware-setup`).
-> 4. Fix Linux Wake on Lan light issue.
-
-> **[SD-BS-CJ41G-M-101-G 08/31/2020 14:01:20](http://files.seeedstudio.com/wiki/X86-BIOS/SD-BS-CJ41G-M-101-G.zip)**
-
-> **SHA256:** eb932b69435d26a5b076c485c90e4289a697681ac092c18e85c86804e3fe4206
-
->1. Under BIOS Menu, **Setup** -> **Chipset** -> **Fan Control**, added **Always On** options.
-
->**[SD-BS-CJ41G-M-101-E 01/07/2020 14:03:11](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-M-101-E.zip)**
-
->**SHA256:** 98bb25d6d32250fb10bf047f5902630b82a8560020fb4336d7723b4dfb3f9df2
-
->1. Fix the problem of incomplete display of startup Seeed logo screen.
-
-:::note
-Latest BIOS support **auto-flash feature**, where you only need to place the files in the **root location of FAT32 format USB** and **select the USB-drive as boot up** option. It will automatic enters flashing.
-:::
-
-### Step 1 - Download the newest version of BIOS
-
-Download the latest version of BIOS from [**here**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-H.zip).
-
-### Step 2 - Prepare bootable USB
-
-Just like creating a bootable USB for installing OS, format the USB into `FAT32` file system. This time, just unzip the downloaded file and copy the contents into the USB.
-
-
-
-### Step 3 - Upgrading BIOS
-
-
-
-
-
Attention
-
The first boot up from the BIOS upgrade is relatively long, please be patient to wait, and the installed OS will launch eventually. It will take around 3 ~ 5 minutes.
-
-
-
-Plug the USB into ODYSSEY - X86J41x5 and boot up and follow steps below:
-
-- Keep pressing `F7` Key to Enter **Boot Manager Screen**. Select the `UEFI: Built-in EFI Shell` as boot device and press `Enter`.
-
-
-
-- Wait a couple of seconds to enter the EFI shell
-
-
-
-- You will see the following message
-
-
-
-- Type **BIOS.nsh** and press **ENTER** to start the update process
-
-
-
-- If the BIOS update was successful, you will see the following output
-
-
-
-### Step 4 - Reboot
-
-- When the BIOS is upgraded, **press the ON/OFF button**, and you should see the blue light goes off.
-
-- **Unplug the DC power jack and RTC battery** from the ODYSSEY-X86.
-
-- Wait a couple of minutes
-
-- Plug the RTC battery and DC power jack back to the ODYSSEY-X86.
-
-- **Press the ON/OFF button and wait patiently**. You should see the blue light goes on.
-
-### Step 5 - Wait Patiently
-
-Please wait patiently and **DO NOT** unplug power (or the hardware) to corrupt the updating process. The process will take **6 ~ 8 minutes**, feel free for a coffee break!
-
-
-
-
-
Attention
-
The first boot up from the BIOS upgrade is relatively long, please be patient to wait, and the installed OS will launch eventually. It will take around 6 ~ 8 minutes.
-
-
-
-## How to update the Embedded Controller
-
-The X86 also has a embedded controller that can be updated. Updating the EC has the same procedure as updating BIOS(auto-update):
-
-1. Download the firmware files.
-
-2. Save them in the root location of a FAT32 formatted USB drive.
-
-3. Start ODYSSEY-X86 and press **F7** to enter **Boot Select Mode**
-
-4. Choose the connected flash drive (if there are 2 options for the flash drive, choose the one that starts with **UEFI**)
-
-5. Wait and it will automatically start the flashing process.
-
-6. Reboot the device when it's done.
-
-
-
-### Latest EC Firmware
-
-[**SD-EC-CJ41G-M-101-R 07/26/2022 17:00:00**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-R.zip)
-
-1. **Fixing bug**: Increase overall stability.
-
->**History EC Firmware:**
-
-[**SD-EC-CJ41G-M-101-Q 10/12/2021 17:00:00**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-Q.zip)
-
-- **SHA256:** 6009005FF61A64A580F0862343CED1E1E8B4DE8625E326510582063D6E20BCE4
-
-1. **Fixing bug**: Increase overall stability.
-
-[**SD-EC-CJ41G-M-101-O 08/16/2021 15:00:00**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-O.zip)
-
-> - **SHA256:** a08605b8b76bda6a50b64e64c4a9b256297d393f7139ffb2525cc93b28556f13
-
-> 1. **Fixing bug**: Increase overall stability.
-
-> [**SD-EC-CJ41G-M-101-M 04/16/2021 01:20:07**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-M.zip)
-
-> - **SHA256:** DB6E1F77D6EB4B9A79DDAF6E7A55052B7BE6E63B8339C7B948FF111E5C9CA8AD
-
-> 1. **Fixing bug**: Increase overall stability.
-
-> [**SD-EC-CJ41G-M-101-K 03/23/2021 10:57:32**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-K.zip)
-
-> - **SHA256:** 5e479185398121b1913ada3cff03264ea1522196b53f34c9ace77bd1f3ecc47e
-
-> 1. **Fixing bug**: Increase stability of the EC firmware.
-
-> [**SD-EC-CJ41G-M-101-J 02/02/2021 15:39:11**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-J.zip)
-
-> - **SHA256:** 4ab099f45439f8f6ec14e25ae50a64f878eed4c998e39000e17f2047df6bbb83
-
-> 1. **Fixing bug**: Shutting down during BIOS setting page causes the ODYSSEY needs to reset the power in order to turn back on.
-
-> [**SD-EC-CJ41G-M-101-I 12/31/2020 20:34:37**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-I.zip)
-
-> - **SHA256:** 94f664401120183238c5eaa41ea267b240dd5836fa879c568bf3275bca508c52
-
-> 1. Optimize FAN control logic
-
->**[SD-EC-CJ41G-M-101-C 08/31/2020 14:01:20](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-C.zip)**
-
->- **SHA256:** 4b7ed82357eb608c3ec00f6f5f0358a35e63b327ae33855eb5e7608814f8df6a
-
-> 1. Optimize the problem of incorrect starting and turning temperature of the Fan.
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: Firmware Upgrade
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-Updating-Firmware
+last_update:
+ date: 03/16/2023
+ author: Lakshantha
+---
+
+
+
+This tutorial demonstrates how to update the BIOS and EC (Embedded Controller) firmware for the ODYSSEY - X86.
+
+
+
+
+
PAY ATTENTION
+
As the provided firmware on the Wiki is supported to J4105/J4125-V1, updating the BIOS firmware from the Wiki on a J4125-V2 board will cause the board to brick. Please ensure that you have the correct version of ODYSSEY.
+
+
+
+## Hardware Requirements
+
+- A Working Computer
+
+- A USB Drive
+
+- A Monitor
+
+- A Keyboard
+
+## How to Upgrade the BIOS
+
+BIOS is also like an OS and can be upgraded to fix bugs and enhance performance of the ODYSSEY - X86J41x5. Here is the instruction how to upgrade the BIOS version on ODYSSEY - X86J41x5.
+
+### Current Latest BIOS Version and Changelog
+
+
+
+
+
Important Notes
+
1. It wipes the old BIOS settings, and so you would need to re-activate your Windows(if using Windows) again (wipes the activation key, needs Internet to activate again).
2. If you have the non-EMMC version of ODYSSEY-X86, before updating the BIOS, Please make sure to disable eMMC in the BIOS Settings Before and After the updates.
+
+
+
+> You may check in the BIOS main page for BIOS and EC Firmware's versions.
+
+
+
+### Latest BIOS Firmware
+
+
+
+
+
PAY ATTENTION
+
As the provided firmware on the Wiki is supported to J4105/J4125-V1, updating the BIOS firmware from the Wiki on a J4125-V2 board will cause the board to brick. Please ensure that you have the correct version of ODYSSEY.
+
+
+
+
+
+**[SD-BS-CJ41G-300-101-K 07/26/2022 15:00:00](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-K.zip)**
+
+- Improve overall stability.
+
+**Note:** If you want the above BIOS with **bifurcation feature enabled**, please contact techsupport@seeed.io
+
+With bifurcation feature, you will be able to use the M.2 M-Key for 4 PCIe x1. This enables you to connect four different PCIe x1 devices to the M.2 such as multiple network ports, multiple SSDs and other expansion devices. With the normal BIOS without bifurcation feature, M.2 M-Key can be used for only one PCIe x4.
+
+>**History BIOS:**
+
+**[SD-BS-CJ41G-300-101-H 08/16/2021 15:00:00](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-H.zip)**
+
+- **SHA256:** 9ea30178b4ef8453c6f24f037b4b3352ac6d214c7c22f94985428bcb23a178c2
+
+- Improve overall stability.
+
+> **[SD-BS-CJ41G-300-101-F 04/16/2021 01:20:07](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-F.zip)**
+
+> - **SHA256:** 53711DBF9FB6ABE564BE1C7A870840F8B87CAA42239448869D87C08C1BDF0EC5
+
+> 1. Improve overall stability.
+
+> **[SD-BS-CJ41G-300-101-C 03/11/2021 16:28:07](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-C.zip)**
+
+> - **SHA256:** 12f4ce1ab81008525138fcd7d830e18dc13936f3ce4a51e17c314fc55debe480
+
+> 1. Fix bug: loads into other OS other than Windows when set to load others.
+
+> **[SD-BS-CJ41G-M-101-K 12/31/2020 20:34:37](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-M-101-K.zip)**
+
+> - **SHA256:** 7208d39c4f77a4837a0a1072dce45c7bc8feba28597522ea036778a9c09aa61a
+
+> 1. Added **Secure Boot**.
+> 2. Added **Wake on LAN**.
+> 3. Fix reboot into BIOS settings page under Linux environment (Eg. `systemctl reboot --firmware-setup`).
+> 4. Fix Linux Wake on Lan light issue.
+
+> **[SD-BS-CJ41G-M-101-G 08/31/2020 14:01:20](http://files.seeedstudio.com/wiki/X86-BIOS/SD-BS-CJ41G-M-101-G.zip)**
+
+> **SHA256:** eb932b69435d26a5b076c485c90e4289a697681ac092c18e85c86804e3fe4206
+
+>1. Under BIOS Menu, **Setup** -> **Chipset** -> **Fan Control**, added **Always On** options.
+
+>**[SD-BS-CJ41G-M-101-E 01/07/2020 14:03:11](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-M-101-E.zip)**
+
+>**SHA256:** 98bb25d6d32250fb10bf047f5902630b82a8560020fb4336d7723b4dfb3f9df2
+
+>1. Fix the problem of incomplete display of startup Seeed logo screen.
+
+:::note
+Latest BIOS support **auto-flash feature**, where you only need to place the files in the **root location of FAT32 format USB** and **select the USB-drive as boot up** option. It will automatic enters flashing.
+:::
+
+### Step 1 - Download the newest version of BIOS
+
+Download the latest version of BIOS from [**here**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-BS-CJ41G-300-101-H.zip).
+
+### Step 2 - Prepare bootable USB
+
+Just like creating a bootable USB for installing OS, format the USB into `FAT32` file system. This time, just unzip the downloaded file and copy the contents into the USB.
+
+
+
+### Step 3 - Upgrading BIOS
+
+
+
+
+
Attention
+
The first boot up from the BIOS upgrade is relatively long, please be patient to wait, and the installed OS will launch eventually. It will take around 3 ~ 5 minutes.
+
+
+
+Plug the USB into ODYSSEY - X86J41x5 and boot up and follow steps below:
+
+- Keep pressing `F7` Key to Enter **Boot Manager Screen**. Select the `UEFI: Built-in EFI Shell` as boot device and press `Enter`.
+
+
+
+- Wait a couple of seconds to enter the EFI shell
+
+
+
+- You will see the following message
+
+
+
+- Type **BIOS.nsh** and press **ENTER** to start the update process
+
+
+
+- If the BIOS update was successful, you will see the following output
+
+
+
+### Step 4 - Reboot
+
+- When the BIOS is upgraded, **press the ON/OFF button**, and you should see the blue light goes off.
+
+- **Unplug the DC power jack and RTC battery** from the ODYSSEY-X86.
+
+- Wait a couple of minutes
+
+- Plug the RTC battery and DC power jack back to the ODYSSEY-X86.
+
+- **Press the ON/OFF button and wait patiently**. You should see the blue light goes on.
+
+### Step 5 - Wait Patiently
+
+Please wait patiently and **DO NOT** unplug power (or the hardware) to corrupt the updating process. The process will take **6 ~ 8 minutes**, feel free for a coffee break!
+
+
+
+
+
Attention
+
The first boot up from the BIOS upgrade is relatively long, please be patient to wait, and the installed OS will launch eventually. It will take around 6 ~ 8 minutes.
+
+
+
+## How to update the Embedded Controller
+
+The X86 also has a embedded controller that can be updated. Updating the EC has the same procedure as updating BIOS(auto-update):
+
+1. Download the firmware files.
+
+2. Save them in the root location of a FAT32 formatted USB drive.
+
+3. Start ODYSSEY-X86 and press **F7** to enter **Boot Select Mode**
+
+4. Choose the connected flash drive (if there are 2 options for the flash drive, choose the one that starts with **UEFI**)
+
+5. Wait and it will automatically start the flashing process.
+
+6. Reboot the device when it's done.
+
+
+
+### Latest EC Firmware
+
+[**SD-EC-CJ41G-M-101-R 07/26/2022 17:00:00**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-R.zip)
+
+1. **Fixing bug**: Increase overall stability.
+
+>**History EC Firmware:**
+
+[**SD-EC-CJ41G-M-101-Q 10/12/2021 17:00:00**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-Q.zip)
+
+- **SHA256:** 6009005FF61A64A580F0862343CED1E1E8B4DE8625E326510582063D6E20BCE4
+
+1. **Fixing bug**: Increase overall stability.
+
+[**SD-EC-CJ41G-M-101-O 08/16/2021 15:00:00**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-O.zip)
+
+> - **SHA256:** a08605b8b76bda6a50b64e64c4a9b256297d393f7139ffb2525cc93b28556f13
+
+> 1. **Fixing bug**: Increase overall stability.
+
+> [**SD-EC-CJ41G-M-101-M 04/16/2021 01:20:07**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-M.zip)
+
+> - **SHA256:** DB6E1F77D6EB4B9A79DDAF6E7A55052B7BE6E63B8339C7B948FF111E5C9CA8AD
+
+> 1. **Fixing bug**: Increase overall stability.
+
+> [**SD-EC-CJ41G-M-101-K 03/23/2021 10:57:32**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-K.zip)
+
+> - **SHA256:** 5e479185398121b1913ada3cff03264ea1522196b53f34c9ace77bd1f3ecc47e
+
+> 1. **Fixing bug**: Increase stability of the EC firmware.
+
+> [**SD-EC-CJ41G-M-101-J 02/02/2021 15:39:11**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-J.zip)
+
+> - **SHA256:** 4ab099f45439f8f6ec14e25ae50a64f878eed4c998e39000e17f2047df6bbb83
+
+> 1. **Fixing bug**: Shutting down during BIOS setting page causes the ODYSSEY needs to reset the power in order to turn back on.
+
+> [**SD-EC-CJ41G-M-101-I 12/31/2020 20:34:37**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-I.zip)
+
+> - **SHA256:** 94f664401120183238c5eaa41ea267b240dd5836fa879c568bf3275bca508c52
+
+> 1. Optimize FAN control logic
+
+>**[SD-EC-CJ41G-M-101-C 08/31/2020 14:01:20](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105864/Documents/SD-EC-CJ41G-M-101-C.zip)**
+
+>- **SHA256:** 4b7ed82357eb608c3ec00f6f5f0358a35e63b327ae33855eb5e7608814f8df6a
+
+> 1. Optimize the problem of incorrect starting and turning temperature of the Fan.
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-pfSense.md b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-pfSense.md
index bbdb68db7b714..a1ed49d882f72 100644
--- a/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-pfSense.md
+++ b/docs/Edge/ODYSSEY/ODYSSEY_X86J4105/OS_Installation/ODYSSEY-X86J4105-pfSense.md
@@ -1,203 +1,201 @@
----
-description: ODYSSEY - X86J41x5
-title: pfSense Installation
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /ODYSSEY-X86J4105-pfSense
-last_update:
- date: 01/03/2023
- author: w0x7ce
-
----
-
-
-
-This tutorial demonstrates how to install the **[pfSense](https://www.pfsense.org/)** onto the [ODYSSEY-X86J41x5](https://www.seeedstudio.com/ODYSSEY-X86J4105800-p-4445.html).
-
-**[pfSense](https://www.pfsense.org/)** is an open source firewall/router computer software distribution based on [FreeBSD](https://www.freebsd.org/). It is installed on a physical computer or a virtual machine to make a dedicated firewall/router for a network.
-
-
-
-For more, you also visit the official [pfSense documents](https://docs.netgate.com/pfsense/en/latest/) to get more insight!
-
-## Hardware Requirements
-
-- A Working Computer
-
-- USB Drive x 2 (less than 8GB is recommended)
-
-- A Monitor
-
-- Keyboard
-
-- Internet & Ethernet Cable
-
-## Download the pfSense OS Image
-
-First, download the [pfSense OS Image](https://www.pfsense.org/download/) into your drive.
-
-
-
-For ODYSSEY-X86J41x5, choose the settings as above and click download.
-
-## Creating a Bootable USB
-
-### Step 1 - Prepare your Bootable USB
-
-Format one of the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
-
-**Note:** Choose `FAT32` for the File System.
-
-
-
-### Step 2 - Download Flash Burner
-
-Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
-
-
-
-### Step 3 - Writing the OS Image into USB
-
-Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
-
-
-
-
-
-**Note:** If a warning states that it does not contain a partition table appear, you can simply click **continue** to ignore the message.
-
-## Installing the pfSense OS
-
-### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
-
-Plugin your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
-
-
-
-### Step 2 - Install the OS
-
-Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB (Installer) and press Enter.
-
-**Note:** Remember to choose the one that has the pfSense iso image on it.
-
-
-
-### Step 3 - Installing process
-
-A boot screen like above should appear. Press `Enter` to select the Boot Multi User (pfSense Installer).
-
-
-
-
-
-Enters the Installer, and press `Enter` to **accept**.
-
-
-
-An options menu should appear as follow, select **Install** and press `Enter`.
-
-
-
-Now, choose the correct keymap for your keyboard, or just select **Continue with default keymap** and press `Enter`.
-
-
-
-Here you can choose Auto to automatic install the pfSense on to the ODYSSEY-X86J41x5, but it's better to use **Manual** to choose exactly where you want to install the pfSense.
-
-**Note:** In this tutorial, pfSense is installed onto a USB drive for convenience. Hence another good reason to choose **Manual** other than Auto.
-
-
-
-Here you can see all the hard drives as well as the partitions here. Choose the hard drive that you want to install pfSense on. Select the hard drive using arrow keys. Here, `da1` is my second USB drive and will be used to install pfSense. Select **Auto** here to automatic partition for pfSense in this hard drive.
-
-
-
-Under the correct hard drive, select **OK**.
-
-
-
-Now, the installing process will take place.
-
-
-
-After installing, the following window will appear, select **No**.
-
-
-
-Select **Reboot** and pfSense is successfully installed!
-
-
-
-## Configurations of pfSense
-
-Reboot ODYSSEY-X86J41x5, and choose the correct hard drive to boot pfSense OS. Plug in the ethernet cable into one of Ethernet ports from ODYSSEY-X86J41x5. The pfSense should booted properly and shows the following screen.
-
-**Note:** If you see LAN already configured, you can choose **`1`** to assign interfaces and choose the right port for **WAN** and get rid of **LAN**. For example, in the below picture, LAN is removed for now.
-
-Along side with the **WAN**, you should see an IP assigned to the device, and this IP will be used later. Now you can try to log on the Web GUI using another PC connected in the same network!
-
-
-
-### Changing pfSense WebGUI protocol (optional)
-
-For some reasons, pfSense use https protocol for Web GUI and may cause failure when logging to the Web GUI. If you failed to log in Web GUI, follow this to change the `https` protocol to `http` protocol.
-
-Choose **`8`** to enter shell in pfSense. Type the following to configure:
-
-```sh
-viconfig
-```
-
-A config file as shown will appear and find `` session and change the `https` protocol to `http`.
-
-**Note:** this is using vim editor, use **x** key from keyboard to delete. Then, press **Esc** and type `:wq!` to save and quit and changes.
-
-
-
-Now, try to log in pfSense Web GUI using the IP address again.
-
-## pfSense Web GUI Configurations
-
-Now you can log into the pfSense Web GUI from another PC using the IP address shown before.
-
-**Note:** default login is **`admin`** and default passsword is **`pfsense`**
-
-
-
-Now you can easily manage your pfSense running on ODYSSEY-X86J41x5!
-
-### Installing packages
-
-To install packages, you can simply navigate to **System** -> **Package manager** and search for the packages that you like!
-
-
-
-
-
-*For more about pfSense, please also visit the official [pfSense Forum](https://forum.netgate.com/)!*
-
-## Resources
-
-Other useful applications:
-
-- [Getting Started with pfSense](https://www.pfsense.org/getting-started/)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: ODYSSEY - X86J41x5
+title: pfSense Installation
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /ODYSSEY-X86J4105-pfSense
+last_update:
+ date: 01/03/2023
+ author: w0x7ce
+---
+
+
+
+This tutorial demonstrates how to install the **[pfSense](https://www.pfsense.org/)** onto the [ODYSSEY-X86J41x5](https://www.seeedstudio.com/ODYSSEY-X86J4105800-p-4445.html).
+
+**[pfSense](https://www.pfsense.org/)** is an open source firewall/router computer software distribution based on [FreeBSD](https://www.freebsd.org/). It is installed on a physical computer or a virtual machine to make a dedicated firewall/router for a network.
+
+
+
+For more, you also visit the official [pfSense documents](https://docs.netgate.com/pfsense/en/latest/) to get more insight!
+
+## Hardware Requirements
+
+- A Working Computer
+
+- USB Drive x 2 (less than 8GB is recommended)
+
+- A Monitor
+
+- Keyboard
+
+- Internet & Ethernet Cable
+
+## Download the pfSense OS Image
+
+First, download the [pfSense OS Image](https://www.pfsense.org/download/) into your drive.
+
+
+
+For ODYSSEY-X86J41x5, choose the settings as above and click download.
+
+## Creating a Bootable USB
+
+### Step 1 - Prepare your Bootable USB
+
+Format one of the USB drive. If you are a Windows user, you can format the USB drive by right-clicking the USB Drive and select `Format`.
+
+**Note:** Choose `FAT32` for the File System.
+
+
+
+### Step 2 - Download Flash Burner
+
+Download the Open Source Flash burner [balenaEtcher](https://www.balena.io/etcher/). Download the version according to your operating system(Windows/macOS/Linux).
+
+
+
+### Step 3 - Writing the OS Image into USB
+
+Select the downloaded Operating System Image, select the formatted USB Drive and Flash! Now, the bootable USB is all set to go.
+
+
+
+
+
+**Note:** If a warning states that it does not contain a partition table appear, you can simply click **continue** to ignore the message.
+
+## Installing the pfSense OS
+
+### Step 1 - Enabling CSM Mode in ODYSSEY - X86J41x5
+
+Plugin your bootable USB, Monitor and keyboard to ODYSSEY - X86J41x5, and power up. When booting up, keep pressing **`DEL`** key to enter the setup screen. Navigate to **`Advanced`** -> **`CSM Support`** and press Enter to enable it.
+
+
+
+### Step 2 - Install the OS
+
+Reboot your ODYSSEY - X86J41x5 and keep pressing **`F7`** to enter the boot manager screen. Select the bootable USB (Installer) and press Enter.
+
+**Note:** Remember to choose the one that has the pfSense iso image on it.
+
+
+
+### Step 3 - Installing process
+
+A boot screen like above should appear. Press `Enter` to select the Boot Multi User (pfSense Installer).
+
+
+
+
+
+Enters the Installer, and press `Enter` to **accept**.
+
+
+
+An options menu should appear as follow, select **Install** and press `Enter`.
+
+
+
+Now, choose the correct keymap for your keyboard, or just select **Continue with default keymap** and press `Enter`.
+
+
+
+Here you can choose Auto to automatic install the pfSense on to the ODYSSEY-X86J41x5, but it's better to use **Manual** to choose exactly where you want to install the pfSense.
+
+**Note:** In this tutorial, pfSense is installed onto a USB drive for convenience. Hence another good reason to choose **Manual** other than Auto.
+
+
+
+Here you can see all the hard drives as well as the partitions here. Choose the hard drive that you want to install pfSense on. Select the hard drive using arrow keys. Here, `da1` is my second USB drive and will be used to install pfSense. Select **Auto** here to automatic partition for pfSense in this hard drive.
+
+
+
+Under the correct hard drive, select **OK**.
+
+
+
+Now, the installing process will take place.
+
+
+
+After installing, the following window will appear, select **No**.
+
+
+
+Select **Reboot** and pfSense is successfully installed!
+
+
+
+## Configurations of pfSense
+
+Reboot ODYSSEY-X86J41x5, and choose the correct hard drive to boot pfSense OS. Plug in the ethernet cable into one of Ethernet ports from ODYSSEY-X86J41x5. The pfSense should booted properly and shows the following screen.
+
+**Note:** If you see LAN already configured, you can choose **`1`** to assign interfaces and choose the right port for **WAN** and get rid of **LAN**. For example, in the below picture, LAN is removed for now.
+
+Along side with the **WAN**, you should see an IP assigned to the device, and this IP will be used later. Now you can try to log on the Web GUI using another PC connected in the same network!
+
+
+
+### Changing pfSense WebGUI protocol (optional)
+
+For some reasons, pfSense use https protocol for Web GUI and may cause failure when logging to the Web GUI. If you failed to log in Web GUI, follow this to change the `https` protocol to `http` protocol.
+
+Choose **`8`** to enter shell in pfSense. Type the following to configure:
+
+```sh
+viconfig
+```
+
+A config file as shown will appear and find `` session and change the `https` protocol to `http`.
+
+**Note:** this is using vim editor, use **x** key from keyboard to delete. Then, press **Esc** and type `:wq!` to save and quit and changes.
+
+
+
+Now, try to log in pfSense Web GUI using the IP address again.
+
+## pfSense Web GUI Configurations
+
+Now you can log into the pfSense Web GUI from another PC using the IP address shown before.
+
+**Note:** default login is **`admin`** and default passsword is **`pfsense`**
+
+
+
+Now you can easily manage your pfSense running on ODYSSEY-X86J41x5!
+
+### Installing packages
+
+To install packages, you can simply navigate to **System** -> **Package manager** and search for the packages that you like!
+
+
+
+
+
+*For more about pfSense, please also visit the official [pfSense Forum](https://forum.netgate.com/)!*
+
+## Resources
+
+Other useful applications:
+
+- [Getting Started with pfSense](https://www.pfsense.org/getting-started/)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_install_codesys.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_install_codesys.md
index bf9a5426cce10..45d9b336a010f 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_install_codesys.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_install_codesys.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to install CODESYS and how to deploy new projects in R1000
-
title: How to install CODESYS for reComputer R1000
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_with_codesys_use_modbus_rtu.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_with_codesys_use_modbus_rtu.md
index 1cf840fc385f9..e451233f97f57 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_with_codesys_use_modbus_rtu.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/CODESYS_with_Modbus_on_R1000/recomputer_r1000_with_codesys_use_modbus_rtu.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use the modbus rtu function of reComputer R1000 based on CODESYS
-
title: How to use CODESYS to configure the Modbus rtu function of R1000
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Chirpstack/recomputer_r1x_chirpstack.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Chirpstack/recomputer_r1x_chirpstack.md
index 669bf2f43df3b..5f023b85454cd 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Chirpstack/recomputer_r1x_chirpstack.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Chirpstack/recomputer_r1x_chirpstack.md
@@ -1,8 +1,6 @@
---
description: Learn how to build a LoRaWAN gateway using ChirpStack on Raspberry Pi–powered reComputer R11. Configure the R1X00 gateway, Packet Forwarder, and SenseCAP S2101 sensors to stream IoT data via MQTT. Access your LoRa devices and applications securely from anywhere in the world.
-
title: ChirpStack R1X Gateway Integration with SenseCAP S2101
-
keywords:
- ChripStack
- LoRa-WAN
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_install_fin.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_install_fin.md
index 2be0fec5c70c6..f186048fa5663 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_install_fin.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_install_fin.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to install fin for reComputer R1000
-
title: reComputer R1000 install FIN
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-_fin_use_logic_to_alarm.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-_fin_use_logic_to_alarm.md
index 401ad3abe74d4..e61011f2b68d2 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-_fin_use_logic_to_alarm.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-_fin_use_logic_to_alarm.md
@@ -1,6 +1,5 @@
---
description: This article will show you how to use the Logic Builder of FIN Framwork
-
title: reComputer R1000 with FIN Logic Builder
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-fin_create_floor_graphic.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-fin_create_floor_graphic.md
index 1357973fcc198..ca3b0378c7881 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-fin_create_floor_graphic.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with-fin_create_floor_graphic.md
@@ -1,6 +1,5 @@
---
description: This article will show you how to create a Floor Graphic
-
title: reComputer R1000 with FIN to create a Floor Graphic
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_equip_graphic.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_equip_graphic.md
index f0f72bfad8a40..b5def13a1c004 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_equip_graphic.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_equip_graphic.md
@@ -1,6 +1,5 @@
---
description: This article will show you how to create a Equip Graphic
-
title: reComputer R1000 with FIN to create a Equip Graphic
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_site_graphic.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_site_graphic.md
index 6f8e9ebaa098c..3cb9a82224fd6 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_site_graphic.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_create_site_graphic.md
@@ -1,6 +1,5 @@
---
description: This article will show you how to create a Site Graphic
-
title: reComputer R1000 with FIN to create a Site Graphic
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_top_level_graphic.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_top_level_graphic.md
index 43dec9c26bbce..6dbd3e411129f 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_top_level_graphic.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_top_level_graphic.md
@@ -1,6 +1,5 @@
---
description: This article will show you how to create a Top Level Graphic
-
title: reComputer R1000 with FIN to create a Top Level Graphic
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_use_modbus.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_use_modbus.md
index 3011f4a1c985e..20d59e90a832c 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_use_modbus.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fin/recomputer_r1000_with_fin_use_modbus.md
@@ -1,6 +1,5 @@
---
description: This article introduces how to use the `Modbus Connector` of `FIN Framwork`.
-
title: reComputer R1000 with FIN to use modbus TCP/RTU
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_to_achieve_SCADA.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_to_achieve_SCADA.md
index fcee363781911..f7f73fb06aef0 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_to_achieve_SCADA.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_to_achieve_SCADA.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use fuxa to achieve SCADA.
-
title: reComputer R1000 with fuxa to achieve SCADA
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_modbus.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_modbus.md
index 6520a6a532103..1541cda947e7b 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_modbus.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_modbus.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use fuxa for ModbusRTU/TCP communication.
-
title: reComputer R1000 with fuxa to use modbus RTU/TCP
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_mqtt.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_mqtt.md
index 30a2148685154..ac59ce1cfe134 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_mqtt.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_mqtt.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use fuxa for MQTT communication.
-
title: reComputer R1000 with fuxa to use mqtt client
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_opcua.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_opcua.md
index bc5422d92d1da..8a59ba2b30a5d 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_opcua.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_opcua.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use fuxa for OPC-UA communication.
-
title: reComputer R1000 with fuxa to use OPC-UA
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_webapi.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_webapi.md
index 407b6faa4daa4..ef16e187efc26 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_webapi.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Fuxa/recomputer_r1000_with_fuxa_use_webapi.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use fuxa for WebAPI communication.
-
title: reComputer R1000 with fuxa to use WebAPI
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-home-assistant.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-home-assistant.md
index 991c66bd46f2a..60e5a6242b5c0 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-home-assistant.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-home-assistant.md
@@ -6,7 +6,6 @@ keywords:
- reComputer R1000
- Home Automation
- Bookworm
-
image: https://files.seeedstudio.com/wiki/reComputer-R1000/recomputer_r_images/01.png
slug: /recomputer_r1000_home_automation
last_update:
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-modbus-home-assistant.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-modbus-home-assistant.md
index ba319620bc052..41a6c22068f98 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-modbus-home-assistant.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Home-Assistant/recomputer-r1000-modbus-home-assistant.md
@@ -7,7 +7,6 @@ keywords:
- Home Automation
- BMS
- Modbus
-
image: https://files.seeedstudio.com/wiki/reComputer-R1000/recomputer_r_images/01.png
slug: /recomputer_r1000_home_assistant_modbus
last_update:
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_aws.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_aws.md
index 4502601f13f43..ec69d9b3fe098 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_aws.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_aws.md
@@ -1,6 +1,5 @@
---
description: Learn how to integrate the N3uron application on the reComputer R1000 with edge computing capabilities and interact with AWS IoT Core. In this tutorial, we will cover the steps to subscribe to outcome data efficiently.
-
title: reComputer R1000 Connect AWS IoT Core with N3uron
keywords:
- reComputer-R1000
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_getting_started.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_getting_started.md
index 9a79ae4193c64..7fbae58dd2b8c 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_getting_started.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/N3uron/recomputer_r1000_n3uron_getting_started.md
@@ -1,6 +1,5 @@
---
description: N3uron is a complete Industrial Edge Platform for IIoT and DataOps, enabling seamless integration between industrial plant floors and third-party applications, both on-premise and in the cloud. Paired with the Computer R1000, it enhances edge control capabilities and delivers robust cloud integration for seamless data availability across your organization.
-
title: reComputer R1000 with N3uron
keywords:
- Edge
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Bacnet_tcp.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Bacnet_tcp.md
index f9c4083bc8576..10991973f35bc 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Bacnet_tcp.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Bacnet_tcp.md
@@ -1,6 +1,5 @@
---
description: This wiki provides a comprehensive guide to working with the Edge Box RPi 200, an industrial IoT edge controller based on the Raspberry Pi 4. It includes instructions for setting up Node-RED, simulating room temperatures with YABE, and discovering and reading BACnet IP device parameters for efficient Building Management System (BMS) integration.
-
title: Edge Box RPi 200 with Node Red and BACnet TCP
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Modbus_rtu.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Modbus_rtu.md
index 9840ec34d8591..3b76b0d7c1fb3 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Modbus_rtu.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_Modbus_rtu.md
@@ -1,6 +1,5 @@
---
description: Learn how to set up and configure Modbus RTU communication using the Edge Box RPi 200 and Node-RED. This guide covers installing the Modbus node, configuring the Modbus getter and server, and using function blocks to extract temperature and humidity data. Follow step-by-step instructions to seamlessly integrate Modbus RTU devices with your industrial IoT setup. Achieve efficient monitoring and control of your processes with ease.
-
title: Edge Box RPi 200 with Node Red and Modbus RS485
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_influxdb.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_influxdb.md
index 5de1d949a3793..6000708ffc51f 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_influxdb.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/Edge_Box_rpi_200_Node_red_influxdb.md
@@ -1,6 +1,5 @@
---
description: Deploy InfluxDB on an Edgebox RPi 200 for efficient time-series data collection and analysis in IoT applications. This guide covers installation, configuration, and usage to leverage the power of InfluxDB on your Raspberry Pi-powered edge controller. Achieve real-time insights and robust monitoring capabilities directly at the edge of your network.
-
title: Edge Box RPi 200 with Node Red and InfluxDB
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-Bacnet.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-Bacnet.md
index 5277866f23db6..3be6b9236b732 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-Bacnet.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-Bacnet.md
@@ -1,6 +1,5 @@
---
description: This wiki provides a comprehensive guide to working with the reTerminal DM an industrial IoT edge HMI based on the Raspberry Pi 4. It includes instructions for setting up Node-RED, simulating room temperatures with YABE, and discovering and reading BACnet IP device parameters for efficient Building Management System (BMS) integration.
-
title: reTerminal DM with Node Red and BACnet TCP
keywords:
- BMS
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-influxdb.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-influxdb.md
index 144a6e98334c6..7651face685ea 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-influxdb.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/reTerminal-DM-Node-Red-influxdb.md
@@ -1,6 +1,5 @@
---
description: Deploy InfluxDB on an reTerminal DM for efficient time-series data collection and analysis in IoT applications. This guide covers installation, configuration, and usage to leverage the power of InfluxDB on your Raspberry Pi-powered HMI. Achieve real-time insights and robust monitoring capabilities directly at the edge of your network.
-
title: reTerminal DM with Node Red and InfluxDB
keywords:
- Raspberry Pi
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-nodered-influxdb.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-nodered-influxdb.md
index efe1d1156f0b2..3d21cf9cecf70 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-nodered-influxdb.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-nodered-influxdb.md
@@ -1,6 +1,5 @@
---
description: Deploy InfluxDB on an reComputer R1000 for efficient time-series data collection and analysis in IoT applications. This guide covers installation, configuration, and usage to leverage the power of InfluxDB on your Raspberry Pi-powered edge controller. Achieve real-time insights and robust monitoring capabilities directly at the edge of your network.
-
title: reComputer R1000 with Node Red and InfluxDB
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-with-nodered-mqtt.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-with-nodered-mqtt.md
index ec70ad51d3e5d..c3c7eae194439 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-with-nodered-mqtt.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer-r1000-with-nodered-mqtt.md
@@ -1,6 +1,5 @@
---
description: Learn how to install MQTT on the reComputer R1000 and test it with Node-RED. MQTT is a lightweight messaging protocol ideal for IoT applications, enabling efficient, real-time data exchange even over unreliable networks. With Node-RED integration, edge devices and central servers achieve seamless connectivity, optimizing data transmission and processing directly at the edge.
-
title: reComputer R1000 with Node Red and MQTT
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_opcua_server.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_opcua_server.md
index e9b155c0d680d..0ee440dbfc9a3 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_opcua_server.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_opcua_server.md
@@ -1,14 +1,12 @@
---
description: This wiki provides a step-by-step guide on setting up an OPC UA server using Node-RED on a Raspberry Pi-powered reComputer R1000. It includes detailed instructions on installing and configuring the OPC UA server node, connecting Modbus TCP and RTU devices, and monitoring data using the UaExpert OPC client. Perfect for those looking to integrate and visualize industrial data with ease.
title: reComputer R1000 act as OPC UA server with Node-RED
-
keywords:
- Edge Controller
- reComputer R1000
- Node-Red
- Modbus
- OPC UA
-
image: https://files.seeedstudio.com/wiki/reComputer-R1000/recomputer_r_images/01.png
slug: /recomputer_r1000_nodered_opcua_server
last_update:
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_s7.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_s7.md
index 0b8925506366b..5985c0a82e3c3 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_s7.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_nodered_s7.md
@@ -1,7 +1,6 @@
---
description: earn how to configure Siemens PLCs using the S7 protocol and integrate them with Node-RED on a Raspberry Pi-powered reComputer for efficient edge computing. Discover step-by-step guidance on setting up S7 nodes, creating flows, and monitoring PLC variables.
title: Connecting Siemens PLCs Using the S7 Protocol with reComputer R1000
-
keywords:
- Edge Controller
- reComputer R1000
@@ -9,7 +8,6 @@ keywords:
- Siemens
- S7
- PLC
-
image: https://files.seeedstudio.com/wiki/reComputer-R1000/recomputer_r_images/01.png
slug: /recomputer_r1000_nodered_s7
last_update:
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_with_node_red_and_bacnet.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_with_node_red_and_bacnet.md
index 2498ea4381d71..1a53c30f8cc0d 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_with_node_red_and_bacnet.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Node-Red/recomputer_r1000_with_node_red_and_bacnet.md
@@ -1,6 +1,5 @@
---
description: This wiki provides a comprehensive guide to working with the reComputer R1000, an industrial IoT edge controller based on the Raspberry Pi 4. It includes instructions for setting up Node-RED, simulating room temperatures with YABE, and discovering and reading BACnet IP device parameters for efficient Building Management System (BMS) integration.
-
title: reComputer R1000 with Node-Red and BACnet IP
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_r1000_flowfuse_getting_start.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_r1000_flowfuse_getting_start.md
index 0fbbc4723e6e2..4a5f480a56b7b 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_r1000_flowfuse_getting_start.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_r1000_flowfuse_getting_start.md
@@ -5,7 +5,6 @@ keywords:
- Flow Fuse
- reComputer R1000
- Node-Red
-
image: https://files.seeedstudio.com/wiki/reComputer-R1000/recomputer_r_images/01.png
slug: /recomputer_r1000_flow_fuse
last_update:
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_use_ups.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_use_ups.md
index 41ef4d3ece249..b6907f6179541 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_use_ups.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/Others/recomputer_use_ups.md
@@ -1,6 +1,5 @@
---
description: This article mainly introduces how to use the modbus rtu function of reComputer R1000 based on CODESYS
-
title: How to use UPS to read input voltage on reComputer r1000
keywords:
- Edge Controller
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_ce.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_ce.md
index da6149a5338f1..e9bbe37b0ce2d 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_ce.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_ce.md
@@ -1,6 +1,5 @@
---
description: The ThingsBoard Installation Guide for reComputer provides step-by-step instructions to set up ThingsBoard v3.8 and PostgreSQL on a reComputer device. It covers Java 17 installation, ThingsBoard service configuration, PostgreSQL setup, and troubleshooting tips for seamless IoT data management.
-
title: Getting Started ThingsBoard With reComputer R1000
keywords:
- reComputer-R1000
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_dashboard.md b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_dashboard.md
index aa5fba2e2d591..eef06ca95b7d0 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_dashboard.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/AIoT/ThingsBoard_Integration/recomputer_r1000_thingsboard_dashboard.md
@@ -1,6 +1,5 @@
---
description: Learn how to use ThingsBoard on the reComputer device with this step-by-step guide. Discover how to add devices, configure MQTT nodes, and create interactive dashboards using popular features for efficient data monitoring.
-
title: Create Dynamic IoT Dashboards with ThingsBoard and reComputer R1000
keywords:
- reComputer-R1000
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_of_multistream_inference_on_raspberrypi5_with_hailo8.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_of_multistream_inference_on_raspberrypi5_with_hailo8.md
index f00c4ab5fef2f..af87ed40cf7a5 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_of_multistream_inference_on_raspberrypi5_with_hailo8.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_of_multistream_inference_on_raspberrypi5_with_hailo8.md
@@ -10,7 +10,6 @@ slug: /benchmark_of_multistream_inference_on_raspberrypi5_with_hailo8
last_update:
date: 11/21/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md
index 044f89b86f7a5..f7cc76fea91e6 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Benchmark/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md
@@ -11,7 +11,6 @@ sku: 103990663
last_update:
date: 07/17/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_home_assistant_recomputer_r2000.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_home_assistant_recomputer_r2000.md
index 4d7f87b1d11f3..a35b420e83589 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_home_assistant_recomputer_r2000.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_home_assistant_recomputer_r2000.md
@@ -1,8 +1,6 @@
---
description: DIY AI-powered home surveillance using Frigate NVR and Hailo AI accelerator on reComputer R2000. Seamlessly integrates with Home Assistant for real-time smart alerts, object detection, and efficient local video processing at the edge.
-
title: Frigate NVR and Hailo on reComputer R2000 connect with Home Assistant
-
keywords:
- Raspberry pi
- Edge AI Computer
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_nvr_with_raspberrypi_5.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_nvr_with_raspberrypi_5.md
index e990ebc929358..7171d15a895db 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_nvr_with_raspberrypi_5.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/frigate_nvr_with_raspberrypi_5.md
@@ -10,7 +10,6 @@ slug: /frigate_nvr_with_raspberrypi_5
last_update:
date: 04/03/2025
author: Joshua Lee
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/go2rtc_on_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/go2rtc_on_recomputer.md
index 669e26fea7748..b1f19e030130f 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/go2rtc_on_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/go2rtc_on_recomputer.md
@@ -11,7 +11,6 @@ sku: 113991274,E24010521,113991294,113991295,113991314,113991334,113991374,11399
last_update:
date: 11/05/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/gun_detection_with_frigate_nvr_on_r2000.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/gun_detection_with_frigate_nvr_on_r2000.md
index 2448cf9ed01a5..6c83dcba63f82 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/gun_detection_with_frigate_nvr_on_r2000.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/gun_detection_with_frigate_nvr_on_r2000.md
@@ -12,7 +12,6 @@ slug: /gun_detection_with_frigate_nvr_on_r2000
last_update:
date: 08/12/2025
author: Nolan Chen
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/ispy_on_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/ispy_on_recomputer.md
index 7a6ef227f8599..54808d9c206ca 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/ispy_on_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/ispy_on_recomputer.md
@@ -10,7 +10,6 @@ slug: /ispy_on_recomputer
last_update:
date: 11/10/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/moonfire_nvr_on_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/moonfire_nvr_on_recomputer.md
index d8a7b81df2467..57cfc62631904 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/moonfire_nvr_on_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/moonfire_nvr_on_recomputer.md
@@ -11,7 +11,6 @@ sku: 113991274,E24010521,113991294,113991295,113991314,113991334,113991374,11399
last_update:
date: 11/05/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/viseron_on_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/viseron_on_recomputer.md
index 24078eeaeca6b..12fc3d8be0453 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/viseron_on_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/viseron_on_recomputer.md
@@ -10,7 +10,6 @@ slug: /viseron_on_recomputer
last_update:
date: 12/07/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/zoneminder_on_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/zoneminder_on_recomputer.md
index 5314a6234e0ce..61e6d75ff3e9b 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/zoneminder_on_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/NVR/zoneminder_on_recomputer.md
@@ -11,7 +11,6 @@ slug: /zoneminder_on_recomputer
last_update:
date: 09/05/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/clip_application_on_rpi_with_ai_kit.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/clip_application_on_rpi_with_ai_kit.md
index 8d69566243bd9..34035f3e9df88 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/clip_application_on_rpi_with_ai_kit.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/clip_application_on_rpi_with_ai_kit.md
@@ -10,7 +10,6 @@ slug: /clip_application_on_rpi5_with_ai_kit
last_update:
date: 09/27/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/convert_model_to_edge_tpu_tflite_format_for_google_coral.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/convert_model_to_edge_tpu_tflite_format_for_google_coral.md
index 5a24a7099003a..6b684d4059568 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/convert_model_to_edge_tpu_tflite_format_for_google_coral.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/convert_model_to_edge_tpu_tflite_format_for_google_coral.md
@@ -12,7 +12,6 @@ slug: /convert_model_to_edge_tpu_tflite_format_for_google_coral
last_update:
date: 07/23/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/facial_recognition_on_the_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/facial_recognition_on_the_recomputer.md
index 2c1b721b14a1f..c7b77d9788db3 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/facial_recognition_on_the_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/facial_recognition_on_the_recomputer.md
@@ -11,7 +11,6 @@ slug: /facial_recognition_on_the_recomputer
last_update:
date: 11/18/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/install_m.2_coral_to_rpi5.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/install_m.2_coral_to_rpi5.md
index 71e5f1351b89e..2c0e0670027b4 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/install_m.2_coral_to_rpi5.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/install_m.2_coral_to_rpi5.md
@@ -10,7 +10,6 @@ slug: /install_m2_coral_to_rpi5
last_update:
date: 07/19/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/pose_based_light_control_with_nodered_and_rpi_with_aikit.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/pose_based_light_control_with_nodered_and_rpi_with_aikit.md
index a805a83ad458e..85cf7f82f4d4a 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/pose_based_light_control_with_nodered_and_rpi_with_aikit.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/pose_based_light_control_with_nodered_and_rpi_with_aikit.md
@@ -11,7 +11,6 @@ slug: /pose_based_light_control_with_nodered_and_rpi_with_aikit
last_update:
date: 07/26/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md
index 6423b5691798e..2f828c2d24d76 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/Other_AI_Applications/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md
@@ -11,7 +11,6 @@ slug: /tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection
last_update:
date: 08/6/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/Using_YOLOv8_and_AI_Box_for_fall_climbing_and_tracking_detection.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/Using_YOLOv8_and_AI_Box_for_fall_climbing_and_tracking_detection.md
index 44b5ab68a3ec1..6818af3d8a4a5 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/Using_YOLOv8_and_AI_Box_for_fall_climbing_and_tracking_detection.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/Using_YOLOv8_and_AI_Box_for_fall_climbing_and_tracking_detection.md
@@ -11,7 +11,6 @@ slug: /yolov8_on_ai_box_for_fall_climbing_tracking
last_update:
date: 07/29/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/yolov8_object_detection_on_recomputer_r1000_with_hailo_8l.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/yolov8_object_detection_on_recomputer_r1000_with_hailo_8l.md
index 28d0c4574210e..bd1f66556af68 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/yolov8_object_detection_on_recomputer_r1000_with_hailo_8l.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/YOLOv8_Object_Detection_Pi-5_R1000_AI-Box/yolov8_object_detection_on_recomputer_r1000_with_hailo_8l.md
@@ -11,7 +11,6 @@ sku: 113991274,E24010521
last_update:
date: 06/26/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov11_for_speed_estimation_and_loitering_detection_on_recomputer.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov11_for_speed_estimation_and_loitering_detection_on_recomputer.md
index 44793dabc9073..78e2697ade702 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov11_for_speed_estimation_and_loitering_detection_on_recomputer.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov11_for_speed_estimation_and_loitering_detection_on_recomputer.md
@@ -11,7 +11,6 @@ slug: /yolov11_for_speed_estimation_and_loitering_detection_on_recomputer
last_update:
date: 12/16/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov8_pose_estimation_on_recomputer_r1000_with_hailo_8l.md b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov8_pose_estimation_on_recomputer_r1000_with_hailo_8l.md
index 40d11503bc803..9da6776293033 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov8_pose_estimation_on_recomputer_r1000_with_hailo_8l.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Computer_Vision/YOLO-based_Applications/yolov8_pose_estimation_on_recomputer_r1000_with_hailo_8l.md
@@ -10,7 +10,6 @@ slug: /yolov8_pose_estimation_on_recomputer_r1000_with_hailo_8l
last_update:
date: 06/26/2024
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_docker.md b/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_docker.md
index 6b8c4ab164177..1e71ea6877de3 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_docker.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_docker.md
@@ -10,7 +10,6 @@ slug: /use_docekr_on_recomputer
last_update:
date: 08/25/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_sqlite.md b/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_sqlite.md
index 15f7d7abef95e..c2401ff5f4461 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_sqlite.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_sqlite.md
@@ -10,7 +10,6 @@ slug: /use_sqlite_on_recomputer
last_update:
date: 09/25/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_uv_to_build_package.md b/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_uv_to_build_package.md
index d844047a8d711..ae1ec9cc4d5f1 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_uv_to_build_package.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Development_Tools/recomputer_use_uv_to_build_package.md
@@ -10,7 +10,6 @@ slug: /use_uv_to_build_package_on_recomputer
last_update:
date: 08/21/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/deploy_deepseek_on_raspberry_pi_ai_box.md b/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/deploy_deepseek_on_raspberry_pi_ai_box.md
index 45ddf88d5f93f..014b42eaff0c8 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/deploy_deepseek_on_raspberry_pi_ai_box.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/deploy_deepseek_on_raspberry_pi_ai_box.md
@@ -11,7 +11,6 @@ slug: /deploy_deepseek_on_raspberry_pi_ai_box
last_update:
date: 03/11/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/distributed_inference_of_deepseek_model_on_raspberrypi.md b/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/distributed_inference_of_deepseek_model_on_raspberrypi.md
index b19231e216969..64252fca55186 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/distributed_inference_of_deepseek_model_on_raspberrypi.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Large_language_Model/distributed_inference_of_deepseek_model_on_raspberrypi.md
@@ -10,7 +10,6 @@ slug: /distributed_inference_of_deepseek_model_on_raspberrypi
last_update:
date: 03/17/2025
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/Application/Speech_Recognition/deploy_whisper_on_raspberry_pi_ai_box.md b/docs/Edge/Raspberry_Pi_Devices/Application/Speech_Recognition/deploy_whisper_on_raspberry_pi_ai_box.md
index 29823d4aa7efa..b74634a2430c7 100644
--- a/docs/Edge/Raspberry_Pi_Devices/Application/Speech_Recognition/deploy_whisper_on_raspberry_pi_ai_box.md
+++ b/docs/Edge/Raspberry_Pi_Devices/Application/Speech_Recognition/deploy_whisper_on_raspberry_pi_ai_box.md
@@ -11,7 +11,6 @@ sku: 114993627, 100061305, 100097052, 114993595, 100077451, 100080766, 100020831
last_update:
date: 01/19/2026
author: Jiahao
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/Raspberry_Pi_Devices/M_2_Hat/m_2_hat_start_with_pi5.md b/docs/Edge/Raspberry_Pi_Devices/M_2_Hat/m_2_hat_start_with_pi5.md
index 5344e4a45041f..e124129cf3247 100644
--- a/docs/Edge/Raspberry_Pi_Devices/M_2_Hat/m_2_hat_start_with_pi5.md
+++ b/docs/Edge/Raspberry_Pi_Devices/M_2_Hat/m_2_hat_start_with_pi5.md
@@ -11,7 +11,6 @@ sku: 103110064,103110063,E2024082901,103110065
last_update:
date: 12/24/2024
author: Jiahaoli
-
---
## Introduction
diff --git a/docs/Edge/reCamera/software_documents/Make_the_Cpp_program_auto_start_on_boot.md b/docs/Edge/reCamera/software_documents/Make_the_Cpp_program_auto_start_on_boot.md
index 02ff3161d2e5c..33f999855a581 100644
--- a/docs/Edge/reCamera/software_documents/Make_the_Cpp_program_auto_start_on_boot.md
+++ b/docs/Edge/reCamera/software_documents/Make_the_Cpp_program_auto_start_on_boot.md
@@ -10,9 +10,7 @@ slug: /make_the_cpp_program_auto_start_on_boot
last_update:
date: 07/26/2025
author: Liangyuxin
-
no_comments: false
-
---
# Make the C++ program auto-start on boot
diff --git a/docs/Edge/reCamera/software_documents/Real_time_YOLO_object_detection_using_reCamera_based_on_Cpp.md b/docs/Edge/reCamera/software_documents/Real_time_YOLO_object_detection_using_reCamera_based_on_Cpp.md
index 84dde7129142a..d32b3d3bff093 100644
--- a/docs/Edge/reCamera/software_documents/Real_time_YOLO_object_detection_using_reCamera_based_on_Cpp.md
+++ b/docs/Edge/reCamera/software_documents/Real_time_YOLO_object_detection_using_reCamera_based_on_Cpp.md
@@ -12,7 +12,6 @@ slug: /real_time_yolo_object_detection_using_recamera_based_on_cpp
last_update:
date: 06/26/2025
author: Liangyuxin
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/reCamera/software_documents/reCamera_connects_to_Xiao_via_HTTP.md b/docs/Edge/reCamera/software_documents/reCamera_connects_to_Xiao_via_HTTP.md
index 45a129daa9eed..9f06c6afb0d20 100644
--- a/docs/Edge/reCamera/software_documents/reCamera_connects_to_Xiao_via_HTTP.md
+++ b/docs/Edge/reCamera/software_documents/reCamera_connects_to_Xiao_via_HTTP.md
@@ -12,7 +12,6 @@ slug: /recamera_connects_to_xiao_via_http
last_update:
date: 07/11/2025
author: Liangyuxin
-
no_comments: false # for Disqus
---
diff --git a/docs/Edge/reServer/reServer_X86/reServer-Getting-Started.md b/docs/Edge/reServer/reServer_X86/reServer-Getting-Started.md
index 2b46a5d4d5814..5798be4687680 100644
--- a/docs/Edge/reServer/reServer_X86/reServer-Getting-Started.md
+++ b/docs/Edge/reServer/reServer_X86/reServer-Getting-Started.md
@@ -7,7 +7,6 @@ sku: 102110559, 102110560, B102110559
last_update:
date: 01/03/2023
author: w0x7ce
-
---
-
-
-
-
-
Important Notes
-
It wipes the old BIOS settings, so you would need to re-activate your Windows(if using Windows) again (wipes the activation key, needs Internet to activate again).
-
-
-
-## Upgrading BIOS
-
-It is recommended to keep your reServer BIOS firmware up-to-date in order to get the best performance with all bug fixes. Please follow the below steps to upgrade the BIOS
-
-### Latest BIOS Firmware
-
-**[ODYSSEY-TGL-A_v2.0a 7/7/2022 16:00:00](https://files.seeedstudio.com/wiki/reServer/ODYSSEY-TGL-A_v2.0a.zip)**
-
-- **SHA256:** 02CC2C24E615EE2665CCCF79257709433D69C5B80326FB6DB12D0341DAC2E5F5
-
-
-
-### Steps to Upgrade
-
-- **Step 1.** Format flash drive as FAT32
-
-- **Step 2.** Extract **ODYSSEY-TGL-A_v1.7a.zip**
-
-- **Step 3.** Copy the 3 files included inside ODYSSEY-TGL-A_v1.1a to the root of the Flash Drive
-
-- **Step 4.** Shutdown reServer if it is already ON
-
-- **Step 5.** Plug the Flash Drive to reServer
-
-- **Step 6.** Turn ON reServer and then press **DELETE** key to enter the BIOS setup
-
-- **Step 7.** Choose **Save & Exit -> Boot Override -> UEFI:Built-in EFI shell**, then **ENTER**
-
-
-
-- **Step 8.** The board will enter shell environment (just wait, do nothing)
-
-
-
-- **Step 9.** Type **fs0:**
-
-
-
-- **Step 10.** Type **dir**, and make sure the file is right. If not right, try to type **fs1:** or **fs2:** or **fs3:** then **dir** to list the files inside
-
-
-
-- **Step 11.** Type **update.nsh** to flash the BIOS
-
-
-
-- **Step 12.** If the BIOS update was successful, you will see the following message
-
-
-
-- **Step 13.** Press the power button to turn OFF the board
-
-- **Step 14.** Unplug the DC power and CMOS battery from the board
-
-- **Step 15.** Wait a few minutes
-
-- **Step 16.** Plug the DC power and CMOS battery back to the board
-
-- **Step 17.** Finally turn ON the board by pressing the power button again
-
-- **Step 18.** Please wait patiently and **DO NOT** unplug power (or the hardware) to corrupt the updating process. The process will take 6 ~ 8 minutes, feel free for a coffee break!
-
-
-
-
-
Attention
-
The first boot up from the BIOS upgrade is relatively long, please be patient to wait, and the installed OS will launch eventually. It will take around 6 ~ 8 minutes.
-
-
-
-## Installing Drivers
-
-If you are using Windows on the reServer, it is recommended to install the relevant drivers for better functionality of the system.
-
-The drivers include:
-
-- Realtek High Definition Audio Driver
-- Intel® Chipset Device Software
-- Intel® Graphics Driver
-- Intel® HID Event Filter driver
-- Intel® Converged Security and Management Engine Driver
-- Intel® Serial IO Host Controller Driver
-- WiFi Driver
-- Ethernet Driver
-- Bluetooth Driver
-
-Please follow the below steps to install the above drivers
-
-- **Step 1.** Download [this file](https://files.seeedstudio.com/wiki/reServer/reServer-Drivers.zip) and extract the **reServer-drivers.zip** file
-
-- **Step 2.** Proceed to the steps below
-
-### Realtek High Definition Audio Driver
-
-- **Step 1.** Extract **audio_realtek_6.0.9057.1_w1064.zip**
-
-- **Step 2.** Open **audio_realtek_6.0.9057.1_w1064**
-
-- **Step 3.** Double click **Setup.exe**
-
-### Intel® Chipset Device Software
-
-- **Step 1.** Extract **chipset-10.1.18460.8229-public-mup.zip**
-
-- **Step 2.** Open **1_chipset-10.1.18460.8229-public-mup**
-
-- **Step 3.** Double click **SetupChipset.exe**
-
-### Intel® Graphics Driver
-
-- **Step 1.** Extract **Graphics Driver.zip**
-
-- **Step 2.** Double click **igfx_win_101.1069.exe**
-
-### Intel® HID Event Filter Driver
-
-- **Step 1.** Extract **Intel(R)_HIDEventFilterDriver-2.2.1.384_20H1Certified.zip**
-
-- **Step 2.** Navigate to `Intel(R)_HIDEventFilterDriver-2.2.1.384_20H1Certified > Installer`
-
-- **Step 3.** Double click **Setup.exe**
-
-### Intel® Converged Security and Management Engine Driver
-
-- **Step 1.** Extract **intel_(r)_csme_15.0.0.1318v3_b0_cons.zip**
-
-- **Step 2.** Navigate to `4_intel_(r)_csme_15.0.0.1318v3_b0_cons > intel_(r)_csme_15.0.0.1318v3_b0_cons > MEI-Only Installer MSI`
-
-- **Step 3.** Double click **MEISetup.exe**
-
-### Intel® Serial IO Host Controller Driver
-
-- **Step 1.** Extract **SerialIO-Win10-30.100.2129.8.zip**
-
-- **Step 2.** Double click **SetupSerialIO.exe**
-
-### WiFi Driver
-
-- **Step 1.** Extract **WiFi-22.90.0-Driver64-Win10-Win11.zip**
-
-- **Step 2.** Double click **WiFi-22.90.0-Driver64-Win10-Win11.exe**
-
-### Ethernet Driver
-
-- **Step 1.** Extract **Wired_driver_26.6_x64.zip**
-
-- **Step 2.** Double click **Wired_driver_26.6_x64.exe**
-
-### Bluetooth Driver
-
-- **Step 1.** Extract **Wireless Bluetooth.zip**
-
-- **Step 2.** Double click **BT-22.90.2-32-64UWD-Win10-Win11.exe**
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
It wipes the old BIOS settings, so you would need to re-activate your Windows(if using Windows) again (wipes the activation key, needs Internet to activate again).
+
+
+
+## Upgrading BIOS
+
+It is recommended to keep your reServer BIOS firmware up-to-date in order to get the best performance with all bug fixes. Please follow the below steps to upgrade the BIOS
+
+### Latest BIOS Firmware
+
+**[ODYSSEY-TGL-A_v2.0a 7/7/2022 16:00:00](https://files.seeedstudio.com/wiki/reServer/ODYSSEY-TGL-A_v2.0a.zip)**
+
+- **SHA256:** 02CC2C24E615EE2665CCCF79257709433D69C5B80326FB6DB12D0341DAC2E5F5
+
+
+
+### Steps to Upgrade
+
+- **Step 1.** Format flash drive as FAT32
+
+- **Step 2.** Extract **ODYSSEY-TGL-A_v1.7a.zip**
+
+- **Step 3.** Copy the 3 files included inside ODYSSEY-TGL-A_v1.1a to the root of the Flash Drive
+
+- **Step 4.** Shutdown reServer if it is already ON
+
+- **Step 5.** Plug the Flash Drive to reServer
+
+- **Step 6.** Turn ON reServer and then press **DELETE** key to enter the BIOS setup
+
+- **Step 7.** Choose **Save & Exit -> Boot Override -> UEFI:Built-in EFI shell**, then **ENTER**
+
+
+
+- **Step 8.** The board will enter shell environment (just wait, do nothing)
+
+
+
+- **Step 9.** Type **fs0:**
+
+
+
+- **Step 10.** Type **dir**, and make sure the file is right. If not right, try to type **fs1:** or **fs2:** or **fs3:** then **dir** to list the files inside
+
+
+
+- **Step 11.** Type **update.nsh** to flash the BIOS
+
+
+
+- **Step 12.** If the BIOS update was successful, you will see the following message
+
+
+
+- **Step 13.** Press the power button to turn OFF the board
+
+- **Step 14.** Unplug the DC power and CMOS battery from the board
+
+- **Step 15.** Wait a few minutes
+
+- **Step 16.** Plug the DC power and CMOS battery back to the board
+
+- **Step 17.** Finally turn ON the board by pressing the power button again
+
+- **Step 18.** Please wait patiently and **DO NOT** unplug power (or the hardware) to corrupt the updating process. The process will take 6 ~ 8 minutes, feel free for a coffee break!
+
+
+
+
+
Attention
+
The first boot up from the BIOS upgrade is relatively long, please be patient to wait, and the installed OS will launch eventually. It will take around 6 ~ 8 minutes.
+
+
+
+## Installing Drivers
+
+If you are using Windows on the reServer, it is recommended to install the relevant drivers for better functionality of the system.
+
+The drivers include:
+
+- Realtek High Definition Audio Driver
+- Intel® Chipset Device Software
+- Intel® Graphics Driver
+- Intel® HID Event Filter driver
+- Intel® Converged Security and Management Engine Driver
+- Intel® Serial IO Host Controller Driver
+- WiFi Driver
+- Ethernet Driver
+- Bluetooth Driver
+
+Please follow the below steps to install the above drivers
+
+- **Step 1.** Download [this file](https://files.seeedstudio.com/wiki/reServer/reServer-Drivers.zip) and extract the **reServer-drivers.zip** file
+
+- **Step 2.** Proceed to the steps below
+
+### Realtek High Definition Audio Driver
+
+- **Step 1.** Extract **audio_realtek_6.0.9057.1_w1064.zip**
+
+- **Step 2.** Open **audio_realtek_6.0.9057.1_w1064**
+
+- **Step 3.** Double click **Setup.exe**
+
+### Intel® Chipset Device Software
+
+- **Step 1.** Extract **chipset-10.1.18460.8229-public-mup.zip**
+
+- **Step 2.** Open **1_chipset-10.1.18460.8229-public-mup**
+
+- **Step 3.** Double click **SetupChipset.exe**
+
+### Intel® Graphics Driver
+
+- **Step 1.** Extract **Graphics Driver.zip**
+
+- **Step 2.** Double click **igfx_win_101.1069.exe**
+
+### Intel® HID Event Filter Driver
+
+- **Step 1.** Extract **Intel(R)_HIDEventFilterDriver-2.2.1.384_20H1Certified.zip**
+
+- **Step 2.** Navigate to `Intel(R)_HIDEventFilterDriver-2.2.1.384_20H1Certified > Installer`
+
+- **Step 3.** Double click **Setup.exe**
+
+### Intel® Converged Security and Management Engine Driver
+
+- **Step 1.** Extract **intel_(r)_csme_15.0.0.1318v3_b0_cons.zip**
+
+- **Step 2.** Navigate to `4_intel_(r)_csme_15.0.0.1318v3_b0_cons > intel_(r)_csme_15.0.0.1318v3_b0_cons > MEI-Only Installer MSI`
+
+- **Step 3.** Double click **MEISetup.exe**
+
+### Intel® Serial IO Host Controller Driver
+
+- **Step 1.** Extract **SerialIO-Win10-30.100.2129.8.zip**
+
+- **Step 2.** Double click **SetupSerialIO.exe**
+
+### WiFi Driver
+
+- **Step 1.** Extract **WiFi-22.90.0-Driver64-Win10-Win11.zip**
+
+- **Step 2.** Double click **WiFi-22.90.0-Driver64-Win10-Win11.exe**
+
+### Ethernet Driver
+
+- **Step 1.** Extract **Wired_driver_26.6_x64.zip**
+
+- **Step 2.** Double click **Wired_driver_26.6_x64.exe**
+
+### Bluetooth Driver
+
+- **Step 1.** Extract **Wireless Bluetooth.zip**
+
+- **Step 2.** Double click **BT-22.90.2-32-64UWD-Win10-Win11.exe**
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/FAQ/ODYSSEY/Power_button.md b/docs/FAQ/ODYSSEY/Power_button.md
index 0dc785af644a2..25ff06ea8280b 100644
--- a/docs/FAQ/ODYSSEY/Power_button.md
+++ b/docs/FAQ/ODYSSEY/Power_button.md
@@ -1,18 +1,17 @@
----
-description: ODYSSEY-FAQ
-title: Different status of Power button of ODYSSEY - X86J41x5
-#keywords:
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S.png
-slug: /Power_button
-last_update:
- date: 2023.6.25
- author: cheng.tang
----
-It has the same power button state as other computers:
-
-`Short Press(While it's off)` -> `Turn on`
-
-`Short Press(While it's on)` -> `Sleep`
-
-`Long Press(While it's on)` -> `Force shutdown`
+---
+description: ODYSSEY-FAQ
+title: Different status of Power button of ODYSSEY - X86J41x5
+#keywords:
+image: https://files.seeedstudio.com/wiki/wiki-platform/S.png
+slug: /Power_button
+last_update:
+ date: 2023.6.25
+ author: cheng.tang
+---
+It has the same power button state as other computers:
+
+`Short Press(While it's off)` -> `Turn on`
+
+`Short Press(While it's on)` -> `Sleep`
+
+`Long Press(While it's on)` -> `Force shutdown`
diff --git a/docs/FAQ/ODYSSEY/power_up.md b/docs/FAQ/ODYSSEY/power_up.md
index c73365dade05a..ee5af19c79bab 100644
--- a/docs/FAQ/ODYSSEY/power_up.md
+++ b/docs/FAQ/ODYSSEY/power_up.md
@@ -1,12 +1,11 @@
----
-description: ODYSSEY-FAQ
-title: ODYSSEY - X86J41x5 doesn't power up
-#keywords:
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S.png
-slug: /power_up
-last_update:
- date: 2023.6.25
- author: cheng.tang
----
-Maker sure you use the 12V/2A power adapter provided in the box and check connection.
+---
+description: ODYSSEY-FAQ
+title: ODYSSEY - X86J41x5 doesn't power up
+#keywords:
+image: https://files.seeedstudio.com/wiki/wiki-platform/S.png
+slug: /power_up
+last_update:
+ date: 2023.6.25
+ author: cheng.tang
+---
+Maker sure you use the 12V/2A power adapter provided in the box and check connection.
diff --git a/docs/FAQ/ODYSSEY/reinstall_the_Original_Windows.md b/docs/FAQ/ODYSSEY/reinstall_the_Original_Windows.md
index 8b7bef9002a55..4455c5aea956c 100644
--- a/docs/FAQ/ODYSSEY/reinstall_the_Original_Windows.md
+++ b/docs/FAQ/ODYSSEY/reinstall_the_Original_Windows.md
@@ -1,21 +1,20 @@
----
-description: ODYSSEY-FAQ
-title: Re-Installing the Original Windows
-#keywords:
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S.png
-slug: /reinstall_the_Original_Windows
-last_update:
- date: 2023.6.25
- author: cheng.tang
----
-
-The eMMC versions of ODYSSEY-X86 will have Windows 10 pre-installed into the device. If you install another OS and wanting to go back to the original Windows 10 please check here:
-
-- [**Original Windows 10 Image**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105-Ant-image/SD-JX-CJ41G-M-101-H.zip)
-
- - This image supports **Auto Flash**. Simply download the above image and unzip the files and place in the **root location of a USB drive**.
-
- - Plug in the USB drive to ODYSSEY-X86 and boot up from the USB Drive. This will auto flash the Original Windows 10 Image back in the eMMC.
-
-- [**Windows 11 Por Image**](https://seeedstudio88-my.sharepoint.com/:u:/g/personal/youjiang_yu_seeedstudio88_onmicrosoft_com/EakKcMn5yvhMkKtm7Fw6JcYBl5L-lGsCgjo_OWJ9L7ts7Q?e=5Dzi3v)
+---
+description: ODYSSEY-FAQ
+title: Re-Installing the Original Windows
+#keywords:
+image: https://files.seeedstudio.com/wiki/wiki-platform/S.png
+slug: /reinstall_the_Original_Windows
+last_update:
+ date: 2023.6.25
+ author: cheng.tang
+---
+
+The eMMC versions of ODYSSEY-X86 will have Windows 10 pre-installed into the device. If you install another OS and wanting to go back to the original Windows 10 please check here:
+
+- [**Original Windows 10 Image**](https://files.seeedstudio.com/wiki/ODYSSEY-X86J4105-Ant-image/SD-JX-CJ41G-M-101-H.zip)
+
+ - This image supports **Auto Flash**. Simply download the above image and unzip the files and place in the **root location of a USB drive**.
+
+ - Plug in the USB drive to ODYSSEY-X86 and boot up from the USB Drive. This will auto flash the Original Windows 10 Image back in the eMMC.
+
+- [**Windows 11 Por Image**](https://seeedstudio88-my.sharepoint.com/:u:/g/personal/youjiang_yu_seeedstudio88_onmicrosoft_com/EakKcMn5yvhMkKtm7Fw6JcYBl5L-lGsCgjo_OWJ9L7ts7Q?e=5Dzi3v)
diff --git a/docs/License.md b/docs/License.md
index 74da85fa304ec..024d20c2f0d2e 100644
--- a/docs/License.md
+++ b/docs/License.md
@@ -2,7 +2,6 @@
sidebar_position: 6
title: License
slug: /License
-
---
## **IMPORTANT NOTICE AND DISCLAIMER**
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_mbim.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_mbim.md
index 6e30c53c2efb2..942686d8c5578 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_mbim.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_mbim.md
@@ -1,6 +1,5 @@
---
description: Guide to setting up Quectel 4G Raspberry Pi HAT on Windows using MBIM mode for stable cellular internet connection.
-
title: 4G Raspberry Pi HAT - MBIM Mode Setup on Windows
keywords:
- Raspberry Pi Hat
@@ -8,7 +7,6 @@ keywords:
- IIoT
- MBIM
- 4G LTE
-
image: https://files.seeedstudio.com/wiki/4g_hat_raspberry_pi_eg25_gl/mbimcmd.webp
slug: /raspberry_pi_4g_lte_hat_mbim
last_update:
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_openwrt.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_openwrt.md
index 668064d562a1f..87e81607ef2e4 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_openwrt.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_openwrt.md
@@ -1,6 +1,5 @@
---
description: Enjoy reliable internet access anywhere with a Raspberry Pi 5, OpenWrt, and a 4G LTE HAT. Learn how to create a high-performance portable hotspot for home, travel, and remote locations.
-
title: Setting Up OpenWrt on Raspberry Pi 5 with a 4G LTE Module
keywords:
- Raspberry Pi Hat
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_qmi.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_qmi.md
index 3cd00de5b6252..5a982e2e9febb 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_qmi.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_qmi.md
@@ -1,6 +1,5 @@
---
description: Learn how to set up a Raspberry Pi with a 4G HAT using the Quectel EG25 module in QMI mode for reliable LTE internet access. Step-by-step guide for configuring, compiling, and dialing with quectel-CM on Raspberry Pi.
-
title: 4G Raspberry Pi HAT - QMI Mode Setup on Raspberry Pi OS
keywords:
- Raspberry Pi Hat
@@ -8,7 +7,6 @@ keywords:
- IIoT
- QMI
- 4G LTE
-
image: https://files.seeedstudio.com/wiki/4g_hat_raspberry_pi_eg25_gl/Raspberry-Pi-4G-LTE-CAT4-HAT.webp
slug: /raspberry_pi_4g_lte_hat_qmi
last_update:
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_rndis.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_rndis.md
index da21c084d970e..c7c2dd1065029 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_rndis.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/4g_lte_rpi_hat_rndis.md
@@ -1,6 +1,5 @@
---
description: Configure RNDIS on Windows to connect Raspberry Pi 4G LTE HAT via USB, enabling seamless internet and network access.
-
title: RNDIS on 4G LTE Raspberry pi HAT Windows
keywords:
- Raspberry Pi Hat
@@ -8,7 +7,6 @@ keywords:
- IIoT
- RNDIS
- 4G LTE
-
image: https://files.seeedstudio.com/wiki/4g_hat_raspberry_pi_eg25_gl/1-114993408-LTE-CAT-4-EG25-GL-4G-HAT-for-Raspberry-Pi.webp
slug: /raspberry_pi_4g_lte_hat_rndis
last_update:
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/ftp_on_rpi_4g_lte_hat.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/ftp_on_rpi_4g_lte_hat.md
index 37f01cbd1fbc9..0ff12224d05f6 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/ftp_on_rpi_4g_lte_hat.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/ftp_on_rpi_4g_lte_hat.md
@@ -1,6 +1,5 @@
---
description: Elevate your IoT projects with FTP and 4G. Learn how to securely transfer files, automate tasks, and monitor remote devices using your Raspberry Pi 4G HAT.
-
title: Connect and Transfer- FTP on Your Raspberry Pi 4G LTE HAT
keywords:
- Raspberry Pi Hat
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/getting_start_with_raspberry_pi_4g_hat_and_quectel_gnss.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/getting_start_with_raspberry_pi_4g_hat_and_quectel_gnss.md
index eae9e6467b378..fd7245cb13f17 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/getting_start_with_raspberry_pi_4g_hat_and_quectel_gnss.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/getting_start_with_raspberry_pi_4g_hat_and_quectel_gnss.md
@@ -1,6 +1,5 @@
---
description: Enhance your IoT applications with our Raspberry Pi 4G LTE and GNSS HAT module. This integrated solution delivers robust cellular connectivity and accurate real-time positioning, ideal for tracking assets, monitoring remote environments, and optimizing field operations.
-
title: Getting Started with Raspberry Pi 4G HAT GNSS Functionalities
keywords:
- Raspberry Pi Hat
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mobile_internet_for_your_pi_ecm_set_up.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mobile_internet_for_your_pi_ecm_set_up.md
index 11b02ab5bbcc6..2c6d8a932c83f 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mobile_internet_for_your_pi_ecm_set_up.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mobile_internet_for_your_pi_ecm_set_up.md
@@ -1,8 +1,6 @@
---
description: Explore the world of ECM mode and 4G LTE on Raspberry Pi. This guide provides step-by-step instructions for configuring cellular connectivity using ECM (Ethernet Control Model), enabling seamless internet access for your projects.
-
title: Mobile Internet for Your Pi - ECM Setup
-
keywords:
- Raspberry Pi Hat
- Getting started
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mqtt_on_rpi_4g_lte_hat.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mqtt_on_rpi_4g_lte_hat.md
index b88a37bac0f7c..1f49b51c39dbd 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mqtt_on_rpi_4g_lte_hat.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/mqtt_on_rpi_4g_lte_hat.md
@@ -1,6 +1,5 @@
---
description: Discover how the 4G LTE HAT for Raspberry Pi and MQTT protocol enable efficient, real-time communication for IoT and IIoT applications. Simplify remote connectivity with AT commands for scalable, high-speed data transmission and remote management.
-
title: Setting Up 4G LTE Connectivity for IIoT with MQTT
keywords:
- Raspberry Pi Hat
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/send_text_massages_lte_cat_hat_for_rpi.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/send_text_massages_lte_cat_hat_for_rpi.md
index 1d777d2708e2a..b96e57b5ad742 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/send_text_massages_lte_cat_hat_for_rpi.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/send_text_massages_lte_cat_hat_for_rpi.md
@@ -1,6 +1,5 @@
---
description: Explore the critical role of SMS sending and receiving in IT systems using Quectel 4G HAT. Learn how SMS ensures reliable communication, enhances system alerts, enables remote control, and supports IoT applications with seamless integration and scalability. Perfect for IT professionals and IoT enthusiasts.
-
title: Sending and Receiving SMS Messages with Quectel 4G Raspberry pi Hat
keywords:
- Raspberry Pi Hat
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/tcp_ip_rpi_4g_lte_hat.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/tcp_ip_rpi_4g_lte_hat.md
index aad2580832e61..de0890a861fb3 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/tcp_ip_rpi_4g_lte_hat.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Applications/tcp_ip_rpi_4g_lte_hat.md
@@ -1,6 +1,5 @@
---
description: Unleash the power of TCP for your Raspberry Pi 4G HAT. Explore how TCP ensures reliable data exchange, essential for IoT applications, remote monitoring, and more.
-
title: 4G LTE HAT on Raspberry Pi- TCP/IP Networking Explained
keywords:
- Raspberry Pi Hat
diff --git a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Getting_Started_LTE_CAT_4_EG25-GL_4G_Hat_for_rpi.md b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Getting_Started_LTE_CAT_4_EG25-GL_4G_Hat_for_rpi.md
index 18e0eb4d5c11e..07013f621ad53 100644
--- a/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Getting_Started_LTE_CAT_4_EG25-GL_4G_Hat_for_rpi.md
+++ b/docs/Network/RaspberryPi_Devices/LTE_CAT_4_EG25_GL_4G_HAT_for_Raspberry_Pi/Getting_Started_LTE_CAT_4_EG25-GL_4G_Hat_for_rpi.md
@@ -1,6 +1,5 @@
---
description: The Quectel EG25-GL-powered 4G LTE Raspberry Pi HAT delivers high-speed connectivity and precise GNSS positioning, making it perfect for IoT and M2M applications. Compatible with Raspberry Pi and PCs, it supports global frequency bands, real-time tracking, and reliable communication for versatile use across industries.
-
title: Getting Started with the Raspberry Pi 4G LTE HAT
keywords:
- Raspberry Pi Hat
diff --git a/docs/Robotics/Robot_Kits/Hand/AmazingHand.md b/docs/Robotics/Robot_Kits/Hand/AmazingHand.md
index 5a37dacbc098c..b8f10929c1d21 100644
--- a/docs/Robotics/Robot_Kits/Hand/AmazingHand.md
+++ b/docs/Robotics/Robot_Kits/Hand/AmazingHand.md
@@ -16,7 +16,6 @@ sku: 100062181,100063642
last_update:
date: 9/10/2025
author: TienjuiWong
-
---
diff --git a/docs/Robotics/Robot_Kits/Lerobot/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md b/docs/Robotics/Robot_Kits/Lerobot/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md
index 162694fe5ef6c..3d3cae037a75c 100644
--- a/docs/Robotics/Robot_Kits/Lerobot/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md
+++ b/docs/Robotics/Robot_Kits/Lerobot/Fine_tune_GR00T_N1.5_for_LeRobot_SO_Arm_and_Deploy_on_Jetson_Thor.md
@@ -1,7 +1,6 @@
---
description: This wiki introduces how to get started with NVIDIA Jetson Thor and provides example workflows for deploying AI and robotics projects on Thor. Detailed step-by-step instructions and reference documentation are also provided.
title: Fine-tune Isaac GR00T N1.5 for LeRobot SO-101 Arm and Deploy on Jetson Thor
-
keywords:
- Thor
- Robotics
diff --git a/docs/Robotics/Robot_Kits/ReachyMini/ReachyMini_Getting_Started.md b/docs/Robotics/Robot_Kits/ReachyMini/ReachyMini_Getting_Started.md
index 19a6fd73bfb32..b3af746fa1ed9 100644
--- a/docs/Robotics/Robot_Kits/ReachyMini/ReachyMini_Getting_Started.md
+++ b/docs/Robotics/Robot_Kits/ReachyMini/ReachyMini_Getting_Started.md
@@ -18,7 +18,6 @@ translation:
last_update:
date: 1/7/2026
author: TienjuiWong
-
---
diff --git a/docs/Sensor/Grove/Grove_Sensors/Sound/Grove-Analog-Microphone.md b/docs/Sensor/Grove/Grove_Sensors/Sound/Grove-Analog-Microphone.md
index a7d1112f5b200..dc214228c48a9 100755
--- a/docs/Sensor/Grove/Grove_Sensors/Sound/Grove-Analog-Microphone.md
+++ b/docs/Sensor/Grove/Grove_Sensors/Sound/Grove-Analog-Microphone.md
@@ -1,290 +1,288 @@
----
-title: Grove - Analog Microphone
-
-
-nointro:
-keywords:
- - docs
- - docusaurus
-image: https://wiki.seeedstudio.com/Grove-Analog-Microphone/
-slug: /Grove-Analog-Microphone
-sku: 101020852
-last_update:
- date: 01/06/2022
- author: gunengyu
----
-
-
-
-The Grove - Analog Microphone is a based on high-performance **SiSonic MEMS** technology, offering an extremely-low-noise, low-current, reliable, and small microphone to opensource hardware industry, and it has improved performance under severe conditions.
-
-Grove - Analog Microphone is an ideal choice of sound sensors where excellent audio performance is required. It can provide up to 20dB of gain and it also features low current, max RF protection, which makes it a perfect microphone for Arduino and Raspberry Pi. Our featured product ReSpeaker Core v2.0 also adopts MEMS technology and the same microphone as Grove - Analog Microphone does. If you are going to get a fancy microphone, here is the choice.
-
-
-
-## Features
-
-- High-performance SiSonic MEMS technology
-- Extremely-low-noise, low-current, and reliable
-- Compact and elegant design
-
-:::warning
- This sound sensor is used to detect whether there's sound surround or not, please don't use the module to collect sound signal. For example, you can use it to make a sound control lamp, but not as a recording device.
-:::
-
-## Applications
-
-- Sound sensor
-- Collecting of sound signal
-- Voice recognition
-- Recording
-
-## Specifications
-
-|Item|Value|
-|-----|------|
-|Dimensions |20mm x 20mm|
-|Operating Voltage |3.3V|
-|Operating Current| 5mA|
-|Operating Temperature Range|-40 °C to 100 °C|
-
-:::tip
- More details about Grove modules please refer to [Grove System](https://wiki.seeedstudio.com/Grove_System/)
-:::
-
-## Platforms Supported
-
-| Arduino | Raspberry Pi | | | |
-|-----------------------------------------------------------------------------------------------------|----------------------------------------------------------------------------------------------------------|-------------------------------------------------------------------------------------------------|---------------------------------------------------------------------------------------------------|----------------------------------------------------------------------------------------------------|
-|  |  |  |  |  |
-
-:::caution
- The platforms mentioned above as supported is/are an indication of the module's software or theoritical compatibility. We only provide software library or code examples for Arduino platform in most cases. It is not possible to provide software library / demo code for all possible MCU platforms. Hence, users have to write their own software library.
-:::
-
-## Getting Started
-
-:::note
- If this is the first time you work with Arduino, we firmly recommend you to see [Getting Started with Arduino](https://wiki.seeedstudio.com/Getting_Started_with_Arduino/) before the start.
-:::
-
-### Play With Arduino
-
-**Hardware**
-
-|Seeeduino V4.2| Base Shield|Grove-Analog Microphone|
-|--------------|------------|-----------------|
-||||
-|[Get One Now](https://www.seeedstudio.com/Seeeduino-V4.2-p-2517.html)|[Get One Now](https://www.seeedstudio.com/Base-Shield-V2-p-1378.html)|[Get One Now](https://www.seeedstudio.com/Grove-Analog-Microphone-p-4593.html)|
-
-- **Step 1.** Connect Grove-Sound Sensor to port **A0** of Grove-Base Shield.
-- **Step 2.** Plug Grove - Base Shield into Seeeduino and connect Seeeduino to PC via a USB cable.
-
-
-
-:::note
- If we don't have Grove Base Shield, We also can directly connect Grove-Sound Sensor to Seeeduino as below.
-:::
-
-| Seeeduino | Grove-Sound Sensor |
-|---------------|-------------------------|
-| 5V | Red |
-| GND | Black |
-| A1 | White |
-| A0 | Yellow |
-
-**Software**
-
-- **Step 1.** Please copy below code to Arduio IDE and upload to arduino. If you do not know how to upload the code, please check [how to upload code](https://wiki.seeedstudio.com/Upload_Code/).
-
-```c
-/*
- Analog input, analog output, serial output
-
- Reads an analog input pin, maps the result to a range from 0 to 255 and uses
- the result to set the pulse width modulation (PWM) of an output pin.
- Also prints the results to the Serial Monitor.
-*/
-
-// These constants won't change. They're used to give names to the pins used:
-const int analogInPin = A0; // Analog input pin that the potentiometer is attached to
-const int analogOutPin = 9; // Analog output pin that the LED is attached to
-
-int sensorValue = 0; // value read from the pot
-int outputValue = 0; // value output to the PWM (analog out)
-
-void setup() {
- Serial.begin(9600); // initialize serial communications at 9600 bps
-}
-
-void loop() {
- sensorValue = analogRead(analogInPin); // read the analog in value
- outputValue = map(sensorValue, 0, 1023, 0, 255); // map it to the range of the analog out
- analogWrite(analogOutPin, outputValue); // change the analog out value
-
- Serial.println(outputValue); // print the results to the Serial Monitor
-
- // wait 2 milliseconds before the next loop for the analog-to-digital
- // converter to settle after the last reading:
- delay(2);
-}
-```
-
-- **Step 2.** Click on **Serial > Plotter** to get the changing curve of the sensor. Please make a noise to view the change of the value.
-
-
-
-### Play With Wio Terminal
-
-**Hardware**
-
-|Wio Terminal|Grove-Analog Microphone|
-|--------------|-----------------|
-|||
-|[Get One Now](https://www.seeedstudio.com/Wio-Terminal-p-4509.html)|[Get One Now](https://www.seeedstudio.com/Grove-Analog-Microphone-p-4593.html)|
-
-#### Hardware Connection
-
-
-
-**Step 1** Plug Grove-Analog Microphone to Wio Terminal via Grove cable and also connect Wio Terminal to PC through a USB cable.
-
-**Step 2** Copy the demo code into your Arduino IDE and upload.
-
-**Software**
-
-```cpp
-#include "seeed_line_chart.h" //include the library
-
-TFT_eSPI tft;
-#define LINE_DIS 0X00
-#define STRING_DIS 0X01
-#define max_size 30 //maximum size of data
-doubles data; //Initilising a doubles type to store data
-int brightness;
-TFT_eSprite spr = TFT_eSprite(&tft); // Sprite
-
-const int MIC = A0; //the microphone amplifier output is connected to pin A0
-int adc;
-int dB, PdB; //the variable that will hold the value read from the microphone each time
-uint8_t mode = LINE_DIS;
-void setup()
-{
- Serial.begin(9600); //sets the baud rate at 9600 so we can check the values the microphone is obtaining on the Serial Monitor
- pinMode(A0, INPUT);
- pinMode(WIO_KEY_C, INPUT_PULLUP);
- pinMode(WIO_BUZZER, OUTPUT);
- tft.begin();
- spr.createSprite(TFT_HEIGHT, TFT_WIDTH);
- spr.setRotation(3);
- tft.setRotation(3);
-}
-
-void loop() {
-
- if (digitalRead(WIO_KEY_C) == LOW) {
- mode ++;
- if(mode > STRING_DIS ) mode = LINE_DIS;
- while(!digitalRead(WIO_KEY_C));
- }
- display(mode);
-}
-
-void display(uint8_t mode)
-{
- adc = analogRead(MIC); //Read the ADC value from amplifer
- //Serial.println (adc);//Print ADC for initial calculation
- dB = (adc + 83.2073) / 7.003; //Convert ADC value to dB using Regression values
-
- if(dB > 50)
- {
- analogWrite(WIO_BUZZER, 128);
-
- }else{
- analogWrite(WIO_BUZZER, 0);
- }
-
- spr.fillSprite(TFT_WHITE);
-
- if (data.size() == max_size)
- {
- data.pop(); //this is used to remove the first read variable
- }
- data.push(dB); //read variables and store in data
-
- //Settings for the line graph title
- auto header = text(0, 0)
- .value("MIC DB Readings")
- .align(center)
- .valign(vcenter)
- .width(tft.width())
- .thickness(2);
-
- header.height(header.font_height() * 2);
- header.draw(); //Header height is the twice the height of the font
- if (LINE_DIS == mode){
- //Settings for the line graph
- auto content = line_chart(20, header.height()); //(x,y) where the line graph begins
- content
- .height(tft.height() - header.height() * 1.5) //actual height of the line chart
- .width(tft.width() - content.x() * 2) //actual width of the line chart
- .based_on(0.0) //Starting point of y-axis, must be a float
- .show_circle(false) //drawing a cirle at each point, default is on.
- .value(data) //passing through the data to line graph
- .color(TFT_RED) //Setting the color for the line
- .draw();
- } else if (STRING_DIS == mode){
- for(int8_t line_index = 0;line_index < 5 ; line_index++)
- {
- spr.drawLine(0, 50 + line_index, tft.width(), 50 + line_index, TFT_GREEN);
- }
- auto header = text(0, 0)
- .thickness(1);
- spr.setFreeFont(&FreeSansBoldOblique24pt7b);
- if(dB > 50){
- spr.setTextColor(TFT_RED);
- }else{
- spr.setTextColor(TFT_BLUE);
- }
- spr.drawFloat(dB,2,70,110);
- spr.drawString(" dB",80 + 100,110,1);
- }
- spr.pushSprite(0, 0);
- delay(100);
-}
-```
-
-:::success
- The image will display on the screen of Wio Terminal if everything goes well.
-:::
-
-
-
-
-
-
-
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-- [**ZIP**] [Grove-Analog_Microphone_v1.0_SCH&PCB.zip](https://files.seeedstudio.com/wiki/Grove-Analog-Microphone/res/202002902_Grove-Analog_Microphone_v1.0_SCH&PCB.zip)
-- [**PDF**] [SMD Mic OMNI-22DB_Specification.pdf](https://files.seeedstudio.com/wiki/Grove-Analog-Microphone/res/SMD_Mic_OMNI-22DB_Specification.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+title: Grove - Analog Microphone
+nointro:
+keywords:
+ - docs
+ - docusaurus
+image: https://wiki.seeedstudio.com/Grove-Analog-Microphone/
+slug: /Grove-Analog-Microphone
+sku: 101020852
+last_update:
+ date: 01/06/2022
+ author: gunengyu
+---
+
+
+
+The Grove - Analog Microphone is a based on high-performance **SiSonic MEMS** technology, offering an extremely-low-noise, low-current, reliable, and small microphone to opensource hardware industry, and it has improved performance under severe conditions.
+
+Grove - Analog Microphone is an ideal choice of sound sensors where excellent audio performance is required. It can provide up to 20dB of gain and it also features low current, max RF protection, which makes it a perfect microphone for Arduino and Raspberry Pi. Our featured product ReSpeaker Core v2.0 also adopts MEMS technology and the same microphone as Grove - Analog Microphone does. If you are going to get a fancy microphone, here is the choice.
+
+
+
+## Features
+
+- High-performance SiSonic MEMS technology
+- Extremely-low-noise, low-current, and reliable
+- Compact and elegant design
+
+:::warning
+ This sound sensor is used to detect whether there's sound surround or not, please don't use the module to collect sound signal. For example, you can use it to make a sound control lamp, but not as a recording device.
+:::
+
+## Applications
+
+- Sound sensor
+- Collecting of sound signal
+- Voice recognition
+- Recording
+
+## Specifications
+
+|Item|Value|
+|-----|------|
+|Dimensions |20mm x 20mm|
+|Operating Voltage |3.3V|
+|Operating Current| 5mA|
+|Operating Temperature Range|-40 °C to 100 °C|
+
+:::tip
+ More details about Grove modules please refer to [Grove System](https://wiki.seeedstudio.com/Grove_System/)
+:::
+
+## Platforms Supported
+
+| Arduino | Raspberry Pi | | | |
+|-----------------------------------------------------------------------------------------------------|----------------------------------------------------------------------------------------------------------|-------------------------------------------------------------------------------------------------|---------------------------------------------------------------------------------------------------|----------------------------------------------------------------------------------------------------|
+|  |  |  |  |  |
+
+:::caution
+ The platforms mentioned above as supported is/are an indication of the module's software or theoritical compatibility. We only provide software library or code examples for Arduino platform in most cases. It is not possible to provide software library / demo code for all possible MCU platforms. Hence, users have to write their own software library.
+:::
+
+## Getting Started
+
+:::note
+ If this is the first time you work with Arduino, we firmly recommend you to see [Getting Started with Arduino](https://wiki.seeedstudio.com/Getting_Started_with_Arduino/) before the start.
+:::
+
+### Play With Arduino
+
+**Hardware**
+
+|Seeeduino V4.2| Base Shield|Grove-Analog Microphone|
+|--------------|------------|-----------------|
+||||
+|[Get One Now](https://www.seeedstudio.com/Seeeduino-V4.2-p-2517.html)|[Get One Now](https://www.seeedstudio.com/Base-Shield-V2-p-1378.html)|[Get One Now](https://www.seeedstudio.com/Grove-Analog-Microphone-p-4593.html)|
+
+- **Step 1.** Connect Grove-Sound Sensor to port **A0** of Grove-Base Shield.
+- **Step 2.** Plug Grove - Base Shield into Seeeduino and connect Seeeduino to PC via a USB cable.
+
+
+
+:::note
+ If we don't have Grove Base Shield, We also can directly connect Grove-Sound Sensor to Seeeduino as below.
+:::
+
+| Seeeduino | Grove-Sound Sensor |
+|---------------|-------------------------|
+| 5V | Red |
+| GND | Black |
+| A1 | White |
+| A0 | Yellow |
+
+**Software**
+
+- **Step 1.** Please copy below code to Arduio IDE and upload to arduino. If you do not know how to upload the code, please check [how to upload code](https://wiki.seeedstudio.com/Upload_Code/).
+
+```c
+/*
+ Analog input, analog output, serial output
+
+ Reads an analog input pin, maps the result to a range from 0 to 255 and uses
+ the result to set the pulse width modulation (PWM) of an output pin.
+ Also prints the results to the Serial Monitor.
+*/
+
+// These constants won't change. They're used to give names to the pins used:
+const int analogInPin = A0; // Analog input pin that the potentiometer is attached to
+const int analogOutPin = 9; // Analog output pin that the LED is attached to
+
+int sensorValue = 0; // value read from the pot
+int outputValue = 0; // value output to the PWM (analog out)
+
+void setup() {
+ Serial.begin(9600); // initialize serial communications at 9600 bps
+}
+
+void loop() {
+ sensorValue = analogRead(analogInPin); // read the analog in value
+ outputValue = map(sensorValue, 0, 1023, 0, 255); // map it to the range of the analog out
+ analogWrite(analogOutPin, outputValue); // change the analog out value
+
+ Serial.println(outputValue); // print the results to the Serial Monitor
+
+ // wait 2 milliseconds before the next loop for the analog-to-digital
+ // converter to settle after the last reading:
+ delay(2);
+}
+```
+
+- **Step 2.** Click on **Serial > Plotter** to get the changing curve of the sensor. Please make a noise to view the change of the value.
+
+
+
+### Play With Wio Terminal
+
+**Hardware**
+
+|Wio Terminal|Grove-Analog Microphone|
+|--------------|-----------------|
+|||
+|[Get One Now](https://www.seeedstudio.com/Wio-Terminal-p-4509.html)|[Get One Now](https://www.seeedstudio.com/Grove-Analog-Microphone-p-4593.html)|
+
+#### Hardware Connection
+
+
+
+**Step 1** Plug Grove-Analog Microphone to Wio Terminal via Grove cable and also connect Wio Terminal to PC through a USB cable.
+
+**Step 2** Copy the demo code into your Arduino IDE and upload.
+
+**Software**
+
+```cpp
+#include "seeed_line_chart.h" //include the library
+
+TFT_eSPI tft;
+#define LINE_DIS 0X00
+#define STRING_DIS 0X01
+#define max_size 30 //maximum size of data
+doubles data; //Initilising a doubles type to store data
+int brightness;
+TFT_eSprite spr = TFT_eSprite(&tft); // Sprite
+
+const int MIC = A0; //the microphone amplifier output is connected to pin A0
+int adc;
+int dB, PdB; //the variable that will hold the value read from the microphone each time
+uint8_t mode = LINE_DIS;
+void setup()
+{
+ Serial.begin(9600); //sets the baud rate at 9600 so we can check the values the microphone is obtaining on the Serial Monitor
+ pinMode(A0, INPUT);
+ pinMode(WIO_KEY_C, INPUT_PULLUP);
+ pinMode(WIO_BUZZER, OUTPUT);
+ tft.begin();
+ spr.createSprite(TFT_HEIGHT, TFT_WIDTH);
+ spr.setRotation(3);
+ tft.setRotation(3);
+}
+
+void loop() {
+
+ if (digitalRead(WIO_KEY_C) == LOW) {
+ mode ++;
+ if(mode > STRING_DIS ) mode = LINE_DIS;
+ while(!digitalRead(WIO_KEY_C));
+ }
+ display(mode);
+}
+
+void display(uint8_t mode)
+{
+ adc = analogRead(MIC); //Read the ADC value from amplifer
+ //Serial.println (adc);//Print ADC for initial calculation
+ dB = (adc + 83.2073) / 7.003; //Convert ADC value to dB using Regression values
+
+ if(dB > 50)
+ {
+ analogWrite(WIO_BUZZER, 128);
+
+ }else{
+ analogWrite(WIO_BUZZER, 0);
+ }
+
+ spr.fillSprite(TFT_WHITE);
+
+ if (data.size() == max_size)
+ {
+ data.pop(); //this is used to remove the first read variable
+ }
+ data.push(dB); //read variables and store in data
+
+ //Settings for the line graph title
+ auto header = text(0, 0)
+ .value("MIC DB Readings")
+ .align(center)
+ .valign(vcenter)
+ .width(tft.width())
+ .thickness(2);
+
+ header.height(header.font_height() * 2);
+ header.draw(); //Header height is the twice the height of the font
+ if (LINE_DIS == mode){
+ //Settings for the line graph
+ auto content = line_chart(20, header.height()); //(x,y) where the line graph begins
+ content
+ .height(tft.height() - header.height() * 1.5) //actual height of the line chart
+ .width(tft.width() - content.x() * 2) //actual width of the line chart
+ .based_on(0.0) //Starting point of y-axis, must be a float
+ .show_circle(false) //drawing a cirle at each point, default is on.
+ .value(data) //passing through the data to line graph
+ .color(TFT_RED) //Setting the color for the line
+ .draw();
+ } else if (STRING_DIS == mode){
+ for(int8_t line_index = 0;line_index < 5 ; line_index++)
+ {
+ spr.drawLine(0, 50 + line_index, tft.width(), 50 + line_index, TFT_GREEN);
+ }
+ auto header = text(0, 0)
+ .thickness(1);
+ spr.setFreeFont(&FreeSansBoldOblique24pt7b);
+ if(dB > 50){
+ spr.setTextColor(TFT_RED);
+ }else{
+ spr.setTextColor(TFT_BLUE);
+ }
+ spr.drawFloat(dB,2,70,110);
+ spr.drawString(" dB",80 + 100,110,1);
+ }
+ spr.pushSprite(0, 0);
+ delay(100);
+}
+```
+
+:::success
+ The image will display on the screen of Wio Terminal if everything goes well.
+:::
+
+
+
+
+
+
+
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+- [**ZIP**] [Grove-Analog_Microphone_v1.0_SCH&PCB.zip](https://files.seeedstudio.com/wiki/Grove-Analog-Microphone/res/202002902_Grove-Analog_Microphone_v1.0_SCH&PCB.zip)
+- [**PDF**] [SMD Mic OMNI-22DB_Specification.pdf](https://files.seeedstudio.com/wiki/Grove-Analog-Microphone/res/SMD_Mic_OMNI-22DB_Specification.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Sensor/mmWave_radar_sensor/mmwave_radar_Intro.md b/docs/Sensor/mmWave_radar_sensor/mmwave_radar_Intro.md
index 6f0322b738773..7a8e100b6ea6c 100644
--- a/docs/Sensor/mmWave_radar_sensor/mmwave_radar_Intro.md
+++ b/docs/Sensor/mmWave_radar_sensor/mmwave_radar_Intro.md
@@ -4,7 +4,6 @@ title: mmWave Radar Sensor Introdution
keywords:
- Grove
- mmWave Radar Sensor
-
image: https://files.seeedstudio.com/wiki/mmwave-for-xiao/mr60/2-mmWave-45font.webp
slug: /mmwave_radar_Intro
last_update:
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/ReSpeaker.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/ReSpeaker.md
index c26d6b39b1cd0..515eb49bf39b0 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/ReSpeaker.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/ReSpeaker.md
@@ -1,6 +1,5 @@
---
description: reSpeaker by Seeed Studio is an open-source modular voice interface platform for creating intelligent voice interaction products. Featuring advanced microphone arrays with far-field recognition, noise suppression, and audio processing algorithms, it delivers clear voice capture even in noisy environments. Compatible with multiple platforms and languages, it offers flexible development, open-source designs, and strong community support.
-
title: reSpeaker Introduction
keywords:
- reSpeaker
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_i2s_test.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_i2s_test.md
index b886b6864f7fb..c8267d4a033fa 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_i2s_test.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_i2s_test.md
@@ -1,6 +1,5 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3 I2S Test
keywords:
- reSpeaker
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_usb_4_mic_array.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_usb_4_mic_array.md
index 919d391674dd3..031866a21429a 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_usb_4_mic_array.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_usb_4_mic_array.md
@@ -1,6 +1,5 @@
---
description: Get started with the ReSpeaker XVF3800 USB 4-Mic Array—a high-performance voice interface module featuring voice capture and cross-platform support via USB or I2C.
-
title: Getting Started with reSpeaker XVF3800 USB Mic Array
keywords:
- reSpeaker
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_with_xiao_intro.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_with_xiao_intro.md
index 3dcf625f1b79b..731008ad8ec89 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_with_xiao_intro.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf3800_with_xiao_intro.md
@@ -1,6 +1,5 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: Getting Started with reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3
keywords:
- reSpeaker
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_doa_vad.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_doa_vad.md
index 251c6a62d107c..c472c9fff3a84 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_doa_vad.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_doa_vad.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3 DoA and VAD
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_edgeimpulse.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_edgeimpulse.md
index 90c39e05d3ec7..c3d1021cbedf0 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_edgeimpulse.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_edgeimpulse.md
@@ -1,8 +1,6 @@
---
description: Unlock powerful voice control with the ReSpeaker XVF3800 USB 4-Mic Array and XIAO ESP32S3. Featuring 360° audio capture, noise suppression, and TinyML wake word detection via Edge Impulse—perfect for smart devices, robotics, and IoT projects.
-
title: TinyML Speech Recognition with Edge Impulse
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_gpio.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_gpio.md
index 57a262ec6c728..f1999e61aa84d 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_gpio.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_gpio.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: Controlling reSpeaker XVF3800 GPIO via XIAO ESP32-S3
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_ha.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_ha.md
index 293175fe6fef3..e17f06c3e9241 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_ha.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_ha.md
@@ -1,8 +1,6 @@
---
description: Experience the power of the ReSpeaker XVF3800 USB 4-Mic Array—an advanced circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the compact XIAO ESP32S3, it delivers high-performance voice control for smart devices, robotics, and IoT applications. Join us as we demonstrate seamless integration with Home Assistant to control devices using voice commands.
-
title: Smart Home Voice Control with Home Assistant
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_http.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_http.md
index 5260564095025..5a1908a233917 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_http.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_http.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3 HTTP Audio Streaming
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_mqtt_stream.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_mqtt_stream.md
index 1081535de27ec..7017aa20e7031 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_mqtt_stream.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_mqtt_stream.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3 MQTT Audio Streaming
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_python_sdk.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_python_sdk.md
index 8e61004107f49..4a320c7680201 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_python_sdk.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_python_sdk.md
@@ -1,6 +1,5 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 Control with Python
keywords:
- reSpeaker
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_record_playback.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_record_playback.md
index 8d1878185682a..048ac363d962f 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_record_playback.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_record_playback.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 Record and Playback Audio Using I2S
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_rgb_test.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_rgb_test.md
index df5557b132af4..7a1e827716944 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_rgb_test.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_rgb_test.md
@@ -1,6 +1,5 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3 RGB Test
keywords:
- reSpeaker
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_tflm.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_tflm.md
index 01d6da81afdf9..3bda0850c2b5e 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_tflm.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_tflm.md
@@ -1,8 +1,6 @@
---
description: Learn how to train and deploy TensorFlow Lite Micro (TFLM) speech models on the Seeed XIAO ESP32 with XVF3800 ReSpeaker for real-time voice recognition. This tutorial covers model training, TFLite conversion to hex code, and flashing to achieve accurate keyword spotting on microcontrollers.
-
title: TensorFlow Lite on reSpeaker XVF3800
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_udp_streaming.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_udp_streaming.md
index defacd64dca67..dd0470675ad54 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_udp_streaming.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_udp_streaming.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 USB Mic Array with XIAO ESP32S3 UDP Audio Streaming
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_volume.md b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_volume.md
index 63432d7a44970..c44e298102362 100644
--- a/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_volume.md
+++ b/docs/Sensor/reSpeaker_XVF3800_USB_4_Mic_Array/respeaker_xvf_3800_volume.md
@@ -1,8 +1,6 @@
---
description: The ReSpeaker XVF3800 USB 4-Mic Array is a professional circular microphone array with AEC, beamforming, noise suppression, and 360° voice capture. Paired with the XIAO ESP32S3, it enables advanced voice control for smart devices, robotics, and IoT applications. Discover seamless integration and dual-mode flexibility.
-
title: reSpeaker XVF3800 Audio Playback and Volume Control via I2C
-
keywords:
- reSpeaker
- XIAO
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Comparison_of_Different_Grove_Temperature_Sensors.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Comparison_of_Different_Grove_Temperature_Sensors.md
index f3584b8e72808..76edf019292f3 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Comparison_of_Different_Grove_Temperature_Sensors.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Comparison_of_Different_Grove_Temperature_Sensors.md
@@ -1,15 +1,12 @@
---
description: A Comparison of Different Grove Temperature Sensors
title: A Comparison of Different Grove Temperature Sensors
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /A_Comparison_of_Different_Grove_Temperature_Sensors
last_update:
date: 02/02/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Handy_Serial_Library.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Handy_Serial_Library.md
index 184fa1c881b5c..76813a26a4fd0 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Handy_Serial_Library.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/A_Handy_Serial_Library.md
@@ -1,15 +1,12 @@
---
description: A Handy Serial Library
title: A Handy Serial Library
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /A_Handy_Serial_Library
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
Arduino hadn’t debugging function, maybe this is the first impression of some software engineers. In fact, often we just use the Arduino to do some simple application, even there’s no debugging, and it does not matter. If you want to use the Arduino to do some complex application, such as face recognition, then maybe you have to rethink if you had chosen the wrong platform.
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Arduino_Common_Error.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Arduino_Common_Error.md
index b5d528859297c..41687233dd628 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Arduino_Common_Error.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Arduino_Common_Error.md
@@ -1,15 +1,12 @@
---
description: Arduino Common Error
title: Arduino Common Error
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /Arduino_Common_Error
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
For a beginner, sometime we will meet some compilation or upload errors. Here we summarize some common errors and solutions, hope this can help.
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Barometer-Selection-Guide.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Barometer-Selection-Guide.md
index 8f4c6656fea2e..164c7adc53442 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Barometer-Selection-Guide.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Barometer-Selection-Guide.md
@@ -1,16 +1,13 @@
---
description: Seeed Barometer Sensor Selection Guide
title: Seeed Barometer Sensor Selection Guide
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /Barometer-Selection-Guide
sku: 101020193,101020192,101020068,101020032,101020812
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
# Seeed Barometer Selection Guide
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Download-Arduino-and-install-Arduino_Driver.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Download-Arduino-and-install-Arduino_Driver.md
index daa74bc50e972..052f0e0013863 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Download-Arduino-and-install-Arduino_Driver.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Download-Arduino-and-install-Arduino_Driver.md
@@ -1,15 +1,12 @@
---
description: Download Arduino and install Arduino driver
title: Download Arduino and install Arduino driver
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /Download-Arduino-and-install-Arduino_Driver
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---

diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/GPS-Modules-Selection-Guide.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/GPS-Modules-Selection-Guide.md
index 241747af04c5e..195e438b44d46 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/GPS-Modules-Selection-Guide.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/GPS-Modules-Selection-Guide.md
@@ -1,15 +1,12 @@
---
description: GPS-Modules-Selection-Guide
title: GPS Modules Selection Guide
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /GPS-Modules-Selection-Guide
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
We have released various types of GPS Modules in recent years. Let's take a close look at them and figure out which one is best suited for you!
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Guide_to_use_demos_downloaded_from_Seeed-s_Github.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Guide_to_use_demos_downloaded_from_Seeed-s_Github.md
index df0481f4d31e3..05c53ccdb388d 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Guide_to_use_demos_downloaded_from_Seeed-s_Github.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/Guide_to_use_demos_downloaded_from_Seeed-s_Github.md
@@ -1,15 +1,12 @@
---
description: Guide to use demos downloaded from Seeed's Github
title: Use Demos from Seeed Studio's Github
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /Guide_to_use_demos_downloaded_from_Seeed-s_Github
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
It is necessary to use demos from Seeeduino Github frequently and there some slight difficult for a novice to run the demo well.
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How-to-Choose-A-Gas-Sensor.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How-to-Choose-A-Gas-Sensor.md
index 353db58bb878c..aeccf4d160ac1 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How-to-Choose-A-Gas-Sensor.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How-to-Choose-A-Gas-Sensor.md
@@ -1,15 +1,12 @@
---
description: How to Choose A Gas Sensor
title: How to Choose A Gas Sensor
-
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
slug: /How-to-Choose-A-Gas-Sensor
last_update:
date: 02/02/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
If you search “gas sensor” on [www.seeedstudio.com](https://www.seeedstudio.com) , you can find a lot of gas sensor. We know that the air component is diverse, and a certain gas sensor can detect one or more air components, so we designed a series of gas sensor.
diff --git a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How_To_Choose_The_Right_Cable.md b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How_To_Choose_The_Right_Cable.md
index 985b29d0ea1e8..346eb5f4a80ad 100644
--- a/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How_To_Choose_The_Right_Cable.md
+++ b/docs/Top_Brand/Arduino/Tutorials/Arduino_Basic_Usage/How_To_Choose_The_Right_Cable.md
@@ -6,9 +6,7 @@ slug: /How_To_Choose_The_Right_Cable
last_update:
date: 02/01/2023
author: w0x7ce
-
no_comments: false # for Disqus
-
---
Examples -->BLDC Motor Shield (TB6605)--> TB6605_demo**.
-
-
-
-- **Step 4.** Upload the demo. If you do not know how to upload the code, please check [How to upload code](https://wiki.seeedstudio.com/Upload_Code/).
-
-:::tip
-If everything goes well, you can see the DC motor run and the LCD will show the speed. Now you can rotate the potentiometer to control the speed of the motor.
-:::
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-- **[Zip]** [BLDC Motor Shield (TB6605) Eagle Files](https://files.seeedstudio.com/wiki/BLDC-Motor-Shield-TB6605/res/Brushless%20Motor%20Shield%20(TB6605FTG)%20v1.01.zip)
-
-- **[PDF]** [42BLF01 Brushless Motor-Specification](https://files.seeedstudio.com/wiki/BLDC-Motor-Shield-TB6605/res/42BLF01-Specification.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+The Brushless Motor Shield (TB6605FTG) is a brushless motor driver for Arduino compatible system. It supports 9V ~ 24V DC input and can continuously and continuously output large current to drive the brushless motor. With the onboard potentiometer, you can adjust the motor speed easily. This shield offers a variety of modes to choose from, you can use the four onboard switches to switch functions.
+
+With the onboard Grove I2C interface, you can work with other grove modules with this shield easily, for instance, you can use a [Grove - LCD RGB Backlight](Grove - LCD RGB Backlight) to display the Motor speed.
+
+We also released the [TB6605 BLDC Motor Kit for Arduino](https://www.seeedstudio.com/TB6605-BLDC-Motor-Kit-for-Arduino-p-4024.html), which is based on this shield and contains an LCD and a high-quality brushless motor to display the Motor speed.
+
+
+
+:::tip
+The wiring color may be different if you are not using the 42BLF01 brushless motor, please connect according to the specific situation
+:::
+
+## Getting Started
+
+### Materials required
+
+- [Brushless Motor Shield (TB6605FTG) x1](https://www.seeedstudio.com/BLDC-Motor-Shield-TB6605-p-4025.html)
+- [Grove - LCD RGB Backlight x1](Grove - LCD RGB Backlight)
+- [Arduino or Seeedunio x1](https://www.seeedstudio.com/Seeeduino-V4-2-p-2517.html)
+- Brushless Motor x1
+
+Or you can just use our [TB6605FTG Brushless Motor Kit for Arduino](https://www.seeedstudio.com/TB6605-BLDC-Motor-Kit-for-Arduino-p-4024.html), this kit contains Brushless Motor Shield, 42BLF01 brushless motor, and a Grove - LCD RGB Backlight.
+
+### Hardware connection
+
+- **Step 1.** Connect the Brushless Motor to the Screw terminal of the Brushless Motor Shield, please refer to the **Table 1.**
+
+- **Step 2.** Connect the Grove - LCD RGB Backlight to the Grove I2C port on the Brushless Motor Shield.
+
+- **Step 3.** Plug the Brushless Motor Shield into your Arduino or Seeeduino.
+
+- **Step 4.** Power the shield with DC jack and power the Arduino via USB cable.
+
+
+
+### Software
+
+:::caution
+If this is the first time you work with Arduino, we strongly recommend you to see [Getting Started with Arduino](https://wiki.seeedstudio.com/Getting_Started_with_Arduino/) before the start.
+:::
+
+- **Step 1.**
+Download the [BLDC Motor Shield (TB6605) lib](https://github.com/Seeed-Studio/BLDC_Motor_Shield_TB6605) Library from Github.
+Download the [Grove-LCD RGB Backlight Library](https://github.com/Seeed-Studio/Grove_LCD_RGB_Backlight/archive/master.zip) Library from Github.
+
+- **Step 2.** Refer to [How to install library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library) to install library for Arduino.
+
+- **Step 3.** Restart the Arduino IDE. Open the example, you can open it via the path: **File --> Examples -->BLDC Motor Shield (TB6605)--> TB6605_demo**.
+
+
+
+- **Step 4.** Upload the demo. If you do not know how to upload the code, please check [How to upload code](https://wiki.seeedstudio.com/Upload_Code/).
+
+:::tip
+If everything goes well, you can see the DC motor run and the LCD will show the speed. Now you can rotate the potentiometer to control the speed of the motor.
+:::
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+- **[Zip]** [BLDC Motor Shield (TB6605) Eagle Files](https://files.seeedstudio.com/wiki/BLDC-Motor-Shield-TB6605/res/Brushless%20Motor%20Shield%20(TB6605FTG)%20v1.01.zip)
+
+- **[PDF]** [42BLF01 Brushless Motor-Specification](https://files.seeedstudio.com/wiki/BLDC-Motor-Shield-TB6605/res/42BLF01-Specification.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-**CAN-BUS** is a common industrial bus because of its long travel distance, medium communication speed and high reliability. It is commonly found on modern machine tools, such as an automotive diagnostic bus.
-
-This CAN-BUS Shield adopts **MCP2515** CAN Bus controller with SPI interface and **MCP2551** CAN transceiver to give your Arduino/Seeeduino CAN-BUS capability. With an **OBD-II** converter cable added on and the OBD-II library imported, you are ready to build an onboard diagnostic device or data logger.
-
-
-
-
-
-**Version**
-
-This document applies to the following version of products:
-
-
-
-
-
Version
-
Released Date
-
How to Buy
-
-
-
CAN BUS Shield V1.0
-
Oct 14, 2012
-
-
-
-
CAN BUS Shield V1.1
-
Aug 10, 2013
-
-
-
-
CAN BUS Shield V1.2
-
Jan 5, 2015
-
-
-
-
CAN BUS Shield V2.0
-
Aug 01,2017
-
-
-
-
-
-**Alternative Choice**
-
-If your project is space limited and also don't need other fuctions except CAN-BUS, here is a Grove CAN-BUS module which is Arduino compatible, more compact and cost effective, please click [here](https://www.seeedstudio.com/Serial-CAN-BUS-Module-based-on-MCP2551-and-MCP2515-p-2924.html) to visit its page.
-
-
-
-**What if I want to connect this shield to my car**
-
-If you want to read data or control your car, there's an OBD>DB9 cable available for you, [this cable](https://www.seeedstudio.com/DB9-to-OBD2-Cable-With-Switch-p-2872.html) make easier to connect to OBD-connector and DB9-connector. This cable will also work with anything that has a OBD-connector. Add a power switch makes such a satisfying click.
-
-
-
-**USB-CAN Analyzer**
-
-If you want a CAN Bus Analyzer to debug your CAN Bus, this [USB-CAN Analyzer](https://www.seeedstudio.com/USB-CAN-Analyzer-p-2888.html) is recommended.
-
-
-
-## Features
-
-- Implements CAN V2.0B speed up to **1 Mb/s**
-- SPI Interface speed up to **10 MHz**
-- Standard (**11 bit**) and extended (**29 bit**) data and remote frames
-- Two receive buffers with prioritized message storage
-- Industrial standard DB-9 connector
-- LED indicators
-
-:::note
-CAN BUS Shield Work well with Arduino UNO (ATmega328), Arduino Mega (ATmega1280/2560) as well as Arduino Leonardo (ATmega32U4).
-:::
-
-## Hardware Overview
-
-
-
-1. **DB9 Interface** - to connect to OBDII Interface via a DBG-OBD Cable.
-2. **V_OBD** - It gets power from OBDII Interface (from DB9)
-3. **Led Indicator**:
- - **PWR**: power
- - **TX**: blink when the data is sending
- - **RX**: blink when there's data receiving
- - **INT**: data interrupt
-4. **Terminal** - CAN_H and CAN_L
-5. **Arduino UNO pin out**
-6. **Serial Grove connector**
-7. **I2C Grove connector**
-8. **ICSP pins**
-9. **IC** - MCP2551, a high-speed CAN transceiver ([datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/Mcp2551.pdf))
-10. **IC** - MCP2515, stand-alone CAN controller with SPI interface ([datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/MCP2515.pdf))
-
-:::warning
-When you use more than two CAN Bus Shield in one net, you should take the impedance into consideration.
-You should either cut P1 in the PCB with a knife, or just remove R3 on the PCB.
-:::
-
-**Pin map**
-
-
-:::note
-The FREE pin is available for the other usages.
-:::
-
-**DB9&OBDii Interface**
-
-
-**CS pin**
-
-:::caution
-When we produced the new batch of CAN-BUS Shield V2, the wire of the back pads was embedded inside the PCB, although the wire between the pads is now not visible on the outside, the inside is still connected, if you want to change the wiring of the pads, you still need to cut the wiring in the PCB first.
-:::
-
-SPI_CS pin of V1.2 is connected to **D9** by default. If you want to change to **D10**, please follow below instructions.
-
-- Step1: Take a look at the backside of the PCBA, you will find a pad named CS.
-
-
-
-- Step2: Cut the wire between pad9 and the middle pad.
-
-
-
-- Step3:Solder the middle pad and pad 10.
-
-
-
-:::warning
-Be careful with the box cutter, it's easy to hurt yourself or the PCBA.
-:::
-
-**SPI pins**
-
-The SPI pins (SCK, MISO, MOSI) are routed to the ICSP pins by default. But for some boards, the SPI pins are located at D11~D13. if this happens, you need make some change to the PCBA. Take a look at the backside of the PCBA, there're three pads, MOSI, MISO and SCK, they are connected to A by default. You can change them to B if needed.
-
-:::note
-For Arduino UNO, Arduino Mega, Arduino Leonardo and any others AVR based Arduino boards, it works well by default setting.
-:::
-
-:::warning
-Be careful when you are going to change SPI pins, it's easy to hurt yourself or the PCBA.
-:::
-
-## Getting Started
-
-Here's a simple example to show you how CAN-BUS Shield works. In this example we need 2 pieces of CAN-BUS Shields as well as Arduino or Seeeduino.
-
-:::note
-This example is built under [Arduino IDE version 1.6.9](https://www.arduino.cc/download_handler.php?f=/arduino-1.6.9-windows.zip).
-:::
-
-**STEP1: What do we need**
-
-
-
-**STEP2: Hardware Connection**
-
-Insert each CAN-BUS Shield into Seeeduino V4.2, and connect the 2 CAN-BUS Shield together via 2 jumper wires. Shown as below images.
-
-
-:::note
-CAN_H to CAN_H, CAN_L to CAN_L
-:::
-
-**STEP3: Software**
-
-Please follow [how to install an arduino library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library/) procedures to install CAN BUS shield library.
-
-- Download the [**Seeed_Arduino_CAN**](https://github.com/Seeed-Studio/Seeed_Arduino_CAN) Arduino library here.
-
-Install the library to your Arduino IDE when it is downloaded.
-
-One of the node (a node means Seeeduino + CAN_BUS Shield) acts as master, the other acts as slaver. The master will send data to slaver constantly.
-
-:::note
-Each node can act as master before the code being uploaded.
-:::
-
-Open the **send** example (**File > Examples > Seeed_Arduino_CAN > send**) and upload to the **master**.
-
-
-Or copy the following to the Arduino IDE and upload:
-
-```cpp
-#include
-#include "mcp2515_can.h"
-
-/*SAMD core*/
-#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
- #define SERIAL SerialUSB
-#else
- #define SERIAL Serial
-#endif
-
-const int SPI_CS_PIN = 9;
-mcp2515_can CAN(SPI_CS_PIN); // Set CS pin
-
-void setup() {
- SERIAL.begin(115200);
- while(!Serial){};
-
- while (CAN_OK != CAN.begin(CAN_500KBPS)) { // init can bus : baudrate = 500k
- SERIAL.println("CAN BUS Shield init fail");
- SERIAL.println(" Init CAN BUS Shield again");
- delay(100);
- }
- SERIAL.println("CAN BUS Shield init ok!");
-}
-
-unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
-void loop() {
- // send data: id = 0x00, standrad frame, data len = 8, stmp: data buf
- stmp[7] = stmp[7] + 1;
- if (stmp[7] == 100) {
- stmp[7] = 0;
- stmp[6] = stmp[6] + 1;
-
- if (stmp[6] == 100) {
- stmp[6] = 0;
- stmp[5] = stmp[6] + 1;
- }
- }
-
- CAN.sendMsgBuf(0x00, 0, 8, stmp);
- delay(100); // send data per 100ms
- SERIAL.println("CAN BUS sendMsgBuf ok!");
-}
-```
-
-**STEP4: View Result**
-
-Open the Serial Monitor of Arduino IDE(**slaver**), you will get the data sent from the master.
-
-
-
-## APIs
-
-### 1.Set the Baud rate
-
-This function is used to initialize the baud rate of the CAN Bus system.
-
-The available baud rates are listed as follows:
-
-```cpp
-#define CAN_5KBPS 1
-#define CAN_10KBPS 2
-#define CAN_20KBPS 3
-#define CAN_25KBPS 4
-#define CAN_31K25BPS 5
-#define CAN_33KBPS 6
-#define CAN_40KBPS 7
-#define CAN_50KBPS 8
-#define CAN_80KBPS 9
-#define CAN_83K3BPS 10
-#define CAN_95KBPS 11
-#define CAN_100KBPS 12
-#define CAN_125KBPS 13
-#define CAN_200KBPS 14
-#define CAN_250KBPS 15
-#define CAN_500KBPS 16
-#define CAN_666kbps 17
-#define CAN_1000KBPS 18
-```
-
-### 2.Set Receive Mask and Filter
-
-There are **2** receive mask registers and **5** filter registers on the controller chip that guarantee you getting data from the target device. They are useful especially in a large network consisting of numerous nodes.
-
-We provide two functions for you to utilize these mask and filter registers. They are:
-
-**Mask:**
-
-```cpp
-init_Mask(unsigned char num, unsigned char ext, unsigned char ulData);
-```
-
-**Filter:**
-
-```cpp
-init_Filt(unsigned char num, unsigned char ext, unsigned char ulData);
-```
-
-- **num** represents which register to use. You can fill 0 or 1 for mask and 0 to 5 for filter.
-- **ext** represents the status of the frame. 0 means it's a mask or filter for a standard frame. 1 means it's for a extended frame.
-- **ulData** represents the content of the mask of filter.
-
-### 3.Check Receive
-
-The MCP2515 can operate in either a polled mode, where the software checks for a received frame, or using additional pins to signal that a frame has been received or transmit completed.
-
-Use the following function to poll for received frames.
-
-```cpp
-INT8U MCP_CAN::checkReceive(void);
-```
-
-The function will return 1 if a frame arrives, and 0 if nothing arrives.
-
-### 4.Get CAN ID
-
-When some data arrive, you can use the following function to get the CAN ID of the "send" node.
-
-```cpp
-INT32U MCP_CAN::getCanId(void)
-```
-
-### 5.Send Data
-
-```cpp
-CAN.sendMsgBuf(INT8U id, INT8U ext, INT8U len, data_buf);
-```
-
-It is a function to send data onto the bus. In which:
-
-- **id** represents where the data comes from.
-- **ext** represents the status of the frame. '0' means standard frame. '1' means extended frame.
-- **len** represents the length of this frame.
-- **data_buf** is the content of this message.
-
-For example, In the 'send' example, we have:
-
-```cpp
-unsigned char stmp[8] = {0, 1, 2, 3, 4, 5, 6, 7};
-CAN.sendMsgBuf(0x00, 0, 8, stmp); //send out the message 'stmp' to the bus and tell other devices this is a standard frame from 0x00.
-```
-
-### 6.Receive Data
-
-The following function is used to receive data on the 'receive' node:
-
-```cpp
-CAN.readMsgBuf(unsigned char len, unsigned char buf);
-```
-
-In conditions that masks and filters have been set. This function can only get frames that meet the requirements of masks and filters.
-
-- **len** represents the data length.
-- **buf** is where you store the data.
-
-### 7.init_CS
-
-it is very usefule for you to use two CAN-BUS shields with one Arduino.we provide CS_CAN pin to select for you.if you cannot kown how to use CS_CAN pin , you can go to [CS_CAN pin](https://wiki.seeedstudio.com/CAN-BUS_Shield_V2.0/#cs_can-pin) to learn.
-
-```cpp
-void MCP_CAN::init_CS(byte _CS)
-```
-
-- **_CS** represents what you select pin.(9 or 10)
-
-## Generate a New BaudRate
-
-We had provided many frequently-used baud rates, as below:
-
-```cpp
-#define CAN_5KBPS 1
-#define CAN_10KBPS 2
-#define CAN_20KBPS 3
-#define CAN_25KBPS 4
-#define CAN_31KBPS 5
-#define CAN_33KBPS 6
-#define CAN_40KBPS 7
-#define CAN_50KBPS 8
-#define CAN_80KBPS 9
-#define CAN_83KBPS 10
-#define CAN_95KBPS 11
-#define CAN_100KBPS 12
-#define CAN_125KBPS 13
-#define CAN_200KBPS 14
-#define CAN_250KBPS 15
-#define CAN_500KBPS 16
-#define CAN_666KBPS 17
-#define CAN_1000KBPS 18
-```
-
-Yet you may still can't find the rate you want. Here we provide a software to help you to calculate the baud rate you need.
-
-Click [here](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/CAN_Baudrate_CalcV1.3.zip) to download the software, it's in Chinese, but never mind, it's easy to use.
-
-
-Open the software, what you need to do is to set the baud rate you want, and then do some simple setting, then click **calculate**.
-
-Then you will get some data, cfg1, cfg2 and cfg3.
-
-You need to add some code to the library.
-
-Open **mcp_can_dfs.h**, you need to add below code at about line 272:
-
-```cpp
-#define MCP_16MHz_xxxkBPS_CFG1 (cfg1) // xxx is the baud rate you need
-#define MCP_16MHz_xxxkBPS_CFG2 (cfg2)
-#define MCP_16MHz_xxxkBPS_CFG3 (cfg2)
-```
-
-Then let's go to about line 390, add below code:
-
-```cpp
-#define CAN_xxxKBPS NUM // xxx is the baudrate you need, and NUM is a number, you need to get a different from the other rates.
-```
-
-Open **mcp_can.cpp**, goto the function **mcp2515_configRate**(at about line 190), then add below code:
-
-```cpp
-case (CAN_xxxKBPS):
- cfg1 = MCP_16MHz_xxxkBPS_CFG1;
- cfg2 = MCP_16MHz_xxxkBPS_CFG2;
- cfg3 = MCP_16MHz_xxxkBPS_CFG3;
- break;
-```
-
-Then you can use the baud rate you need. And please give me a pull request at github when you use a new rate, so I can add it to the library to help other guys.
-
-## Projects
-
-If you want to make some awesome projects with CAN-BUS shield, here are some projects for reference.
-
-### Volkswagen CAN BUS Gaming
-
-
-Ever wanted to play a car/truck simulator with a real dashboard on your PC? Me too! I'm trying to control a VW Polo 6R dashboard via CAN Bus with an Arduino Uno and a Seeed CAN Bus Shield. Inspired by Silas Parker. Thanks Sepp and Is0-Mick for their great support!
-
-
-
-### Hack your vehicle CAN-BUS
-
-
-Modern Vehicles all come equipped with a CAN-BUS Controller Area Network, Instead of having a million wires running back and forth from various devices in your car to the battery, its making use of a more clever system.
-
-All electronic functions are connected to the TIPM, (Totally integrated Power Module), such as solenoids/relays to lock the doors or mini motors to wind the windows etc.
-
-From each node (IE Switch pod that controls your windows or electric door locks) it broadcasts a message across the CAN. When the TIPM detects a valid message it will react accordingly like, lock the doors, switch on lights and so on.
-
-
-
-## FAQ
-
-------
-**Q1: I can't get data from other CAN device.**
-
-- Check if the connection is right
-- Check if the baud rate setting is right
-
-**Q2: The serial monitor print Init Fail.**
-
-- Check if the CS pin setting is matched with the code. For CAN Bus Shield V1.1/1.2, CS pin is connected to D9, others are to D10.
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
------
-
-- **[PDF]**[CAN-BUS Shield V2.0 Schmatics](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%20Shield%20%20v2.0.pdf)
-- **[Eagle]**[Schematic & PCB of CAN-BUS Shield V2.0](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%20Shield%20%20v2.0.rar)
-- **[Library]**[Arduino Library for CAN-BUS Shield](https://github.com/Seeed-Studio/CAN_BUS_Shield)
-- **[Datasheet]**[MCP2515 datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/MCP2515.pdf)
-- **[Datasheet]**[MCP2551 datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/Mcp2551.pdf)
-- **[Demo]**[An OBD Demo](https://github.com/Seeed-Studio/CANBUS_SHIELD_OBD_RECIPLE)
-- **[Tool]**[MCP2515 Baud Rate Tool](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/CAN_Baudrate_CalcV1.3.zip)
-- **[Tool]**[USB-CAN Analyzer](https://www.seeedstudio.com/USB-CAN-Analyzer-p-2888.html)
-- **[Cable]**[DB9 to OBD2 Cable](https://www.seeedstudio.com/DB9-to-OBD2-Cable-With-Switch-p-2872.html)
-- **[Drawing]**[CAN BUS Shield v2.0 Drawing in PDF](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%C2%A0SHIELD%C2%A0V2.0.pdf)
-- **[Drawing]**[CAN BUS Shield v2.0 Drawing in DXF](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%C2%A0SHIELD%C2%A0V2.0.dxf.zip)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+**CAN-BUS** is a common industrial bus because of its long travel distance, medium communication speed and high reliability. It is commonly found on modern machine tools, such as an automotive diagnostic bus.
+
+This CAN-BUS Shield adopts **MCP2515** CAN Bus controller with SPI interface and **MCP2551** CAN transceiver to give your Arduino/Seeeduino CAN-BUS capability. With an **OBD-II** converter cable added on and the OBD-II library imported, you are ready to build an onboard diagnostic device or data logger.
+
+
+
+
+
+**Version**
+
+This document applies to the following version of products:
+
+
+
+
+
Version
+
Released Date
+
How to Buy
+
+
+
CAN BUS Shield V1.0
+
Oct 14, 2012
+
+
+
+
CAN BUS Shield V1.1
+
Aug 10, 2013
+
+
+
+
CAN BUS Shield V1.2
+
Jan 5, 2015
+
+
+
+
CAN BUS Shield V2.0
+
Aug 01,2017
+
+
+
+
+
+**Alternative Choice**
+
+If your project is space limited and also don't need other fuctions except CAN-BUS, here is a Grove CAN-BUS module which is Arduino compatible, more compact and cost effective, please click [here](https://www.seeedstudio.com/Serial-CAN-BUS-Module-based-on-MCP2551-and-MCP2515-p-2924.html) to visit its page.
+
+
+
+**What if I want to connect this shield to my car**
+
+If you want to read data or control your car, there's an OBD>DB9 cable available for you, [this cable](https://www.seeedstudio.com/DB9-to-OBD2-Cable-With-Switch-p-2872.html) make easier to connect to OBD-connector and DB9-connector. This cable will also work with anything that has a OBD-connector. Add a power switch makes such a satisfying click.
+
+
+
+**USB-CAN Analyzer**
+
+If you want a CAN Bus Analyzer to debug your CAN Bus, this [USB-CAN Analyzer](https://www.seeedstudio.com/USB-CAN-Analyzer-p-2888.html) is recommended.
+
+
+
+## Features
+
+- Implements CAN V2.0B speed up to **1 Mb/s**
+- SPI Interface speed up to **10 MHz**
+- Standard (**11 bit**) and extended (**29 bit**) data and remote frames
+- Two receive buffers with prioritized message storage
+- Industrial standard DB-9 connector
+- LED indicators
+
+:::note
+CAN BUS Shield Work well with Arduino UNO (ATmega328), Arduino Mega (ATmega1280/2560) as well as Arduino Leonardo (ATmega32U4).
+:::
+
+## Hardware Overview
+
+
+
+1. **DB9 Interface** - to connect to OBDII Interface via a DBG-OBD Cable.
+2. **V_OBD** - It gets power from OBDII Interface (from DB9)
+3. **Led Indicator**:
+ - **PWR**: power
+ - **TX**: blink when the data is sending
+ - **RX**: blink when there's data receiving
+ - **INT**: data interrupt
+4. **Terminal** - CAN_H and CAN_L
+5. **Arduino UNO pin out**
+6. **Serial Grove connector**
+7. **I2C Grove connector**
+8. **ICSP pins**
+9. **IC** - MCP2551, a high-speed CAN transceiver ([datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/Mcp2551.pdf))
+10. **IC** - MCP2515, stand-alone CAN controller with SPI interface ([datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/MCP2515.pdf))
+
+:::warning
+When you use more than two CAN Bus Shield in one net, you should take the impedance into consideration.
+You should either cut P1 in the PCB with a knife, or just remove R3 on the PCB.
+:::
+
+**Pin map**
+
+
+:::note
+The FREE pin is available for the other usages.
+:::
+
+**DB9&OBDii Interface**
+
+
+**CS pin**
+
+:::caution
+When we produced the new batch of CAN-BUS Shield V2, the wire of the back pads was embedded inside the PCB, although the wire between the pads is now not visible on the outside, the inside is still connected, if you want to change the wiring of the pads, you still need to cut the wiring in the PCB first.
+:::
+
+SPI_CS pin of V1.2 is connected to **D9** by default. If you want to change to **D10**, please follow below instructions.
+
+- Step1: Take a look at the backside of the PCBA, you will find a pad named CS.
+
+
+
+- Step2: Cut the wire between pad9 and the middle pad.
+
+
+
+- Step3:Solder the middle pad and pad 10.
+
+
+
+:::warning
+Be careful with the box cutter, it's easy to hurt yourself or the PCBA.
+:::
+
+**SPI pins**
+
+The SPI pins (SCK, MISO, MOSI) are routed to the ICSP pins by default. But for some boards, the SPI pins are located at D11~D13. if this happens, you need make some change to the PCBA. Take a look at the backside of the PCBA, there're three pads, MOSI, MISO and SCK, they are connected to A by default. You can change them to B if needed.
+
+:::note
+For Arduino UNO, Arduino Mega, Arduino Leonardo and any others AVR based Arduino boards, it works well by default setting.
+:::
+
+:::warning
+Be careful when you are going to change SPI pins, it's easy to hurt yourself or the PCBA.
+:::
+
+## Getting Started
+
+Here's a simple example to show you how CAN-BUS Shield works. In this example we need 2 pieces of CAN-BUS Shields as well as Arduino or Seeeduino.
+
+:::note
+This example is built under [Arduino IDE version 1.6.9](https://www.arduino.cc/download_handler.php?f=/arduino-1.6.9-windows.zip).
+:::
+
+**STEP1: What do we need**
+
+
+
+**STEP2: Hardware Connection**
+
+Insert each CAN-BUS Shield into Seeeduino V4.2, and connect the 2 CAN-BUS Shield together via 2 jumper wires. Shown as below images.
+
+
+:::note
+CAN_H to CAN_H, CAN_L to CAN_L
+:::
+
+**STEP3: Software**
+
+Please follow [how to install an arduino library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library/) procedures to install CAN BUS shield library.
+
+- Download the [**Seeed_Arduino_CAN**](https://github.com/Seeed-Studio/Seeed_Arduino_CAN) Arduino library here.
+
+Install the library to your Arduino IDE when it is downloaded.
+
+One of the node (a node means Seeeduino + CAN_BUS Shield) acts as master, the other acts as slaver. The master will send data to slaver constantly.
+
+:::note
+Each node can act as master before the code being uploaded.
+:::
+
+Open the **send** example (**File > Examples > Seeed_Arduino_CAN > send**) and upload to the **master**.
+
+
+Or copy the following to the Arduino IDE and upload:
+
+```cpp
+#include
+#include "mcp2515_can.h"
+
+/*SAMD core*/
+#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
+ #define SERIAL SerialUSB
+#else
+ #define SERIAL Serial
+#endif
+
+const int SPI_CS_PIN = 9;
+mcp2515_can CAN(SPI_CS_PIN); // Set CS pin
+
+void setup() {
+ SERIAL.begin(115200);
+ while(!Serial){};
+
+ while (CAN_OK != CAN.begin(CAN_500KBPS)) { // init can bus : baudrate = 500k
+ SERIAL.println("CAN BUS Shield init fail");
+ SERIAL.println(" Init CAN BUS Shield again");
+ delay(100);
+ }
+ SERIAL.println("CAN BUS Shield init ok!");
+}
+
+unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
+void loop() {
+ // send data: id = 0x00, standrad frame, data len = 8, stmp: data buf
+ stmp[7] = stmp[7] + 1;
+ if (stmp[7] == 100) {
+ stmp[7] = 0;
+ stmp[6] = stmp[6] + 1;
+
+ if (stmp[6] == 100) {
+ stmp[6] = 0;
+ stmp[5] = stmp[6] + 1;
+ }
+ }
+
+ CAN.sendMsgBuf(0x00, 0, 8, stmp);
+ delay(100); // send data per 100ms
+ SERIAL.println("CAN BUS sendMsgBuf ok!");
+}
+```
+
+**STEP4: View Result**
+
+Open the Serial Monitor of Arduino IDE(**slaver**), you will get the data sent from the master.
+
+
+
+## APIs
+
+### 1.Set the Baud rate
+
+This function is used to initialize the baud rate of the CAN Bus system.
+
+The available baud rates are listed as follows:
+
+```cpp
+#define CAN_5KBPS 1
+#define CAN_10KBPS 2
+#define CAN_20KBPS 3
+#define CAN_25KBPS 4
+#define CAN_31K25BPS 5
+#define CAN_33KBPS 6
+#define CAN_40KBPS 7
+#define CAN_50KBPS 8
+#define CAN_80KBPS 9
+#define CAN_83K3BPS 10
+#define CAN_95KBPS 11
+#define CAN_100KBPS 12
+#define CAN_125KBPS 13
+#define CAN_200KBPS 14
+#define CAN_250KBPS 15
+#define CAN_500KBPS 16
+#define CAN_666kbps 17
+#define CAN_1000KBPS 18
+```
+
+### 2.Set Receive Mask and Filter
+
+There are **2** receive mask registers and **5** filter registers on the controller chip that guarantee you getting data from the target device. They are useful especially in a large network consisting of numerous nodes.
+
+We provide two functions for you to utilize these mask and filter registers. They are:
+
+**Mask:**
+
+```cpp
+init_Mask(unsigned char num, unsigned char ext, unsigned char ulData);
+```
+
+**Filter:**
+
+```cpp
+init_Filt(unsigned char num, unsigned char ext, unsigned char ulData);
+```
+
+- **num** represents which register to use. You can fill 0 or 1 for mask and 0 to 5 for filter.
+- **ext** represents the status of the frame. 0 means it's a mask or filter for a standard frame. 1 means it's for a extended frame.
+- **ulData** represents the content of the mask of filter.
+
+### 3.Check Receive
+
+The MCP2515 can operate in either a polled mode, where the software checks for a received frame, or using additional pins to signal that a frame has been received or transmit completed.
+
+Use the following function to poll for received frames.
+
+```cpp
+INT8U MCP_CAN::checkReceive(void);
+```
+
+The function will return 1 if a frame arrives, and 0 if nothing arrives.
+
+### 4.Get CAN ID
+
+When some data arrive, you can use the following function to get the CAN ID of the "send" node.
+
+```cpp
+INT32U MCP_CAN::getCanId(void)
+```
+
+### 5.Send Data
+
+```cpp
+CAN.sendMsgBuf(INT8U id, INT8U ext, INT8U len, data_buf);
+```
+
+It is a function to send data onto the bus. In which:
+
+- **id** represents where the data comes from.
+- **ext** represents the status of the frame. '0' means standard frame. '1' means extended frame.
+- **len** represents the length of this frame.
+- **data_buf** is the content of this message.
+
+For example, In the 'send' example, we have:
+
+```cpp
+unsigned char stmp[8] = {0, 1, 2, 3, 4, 5, 6, 7};
+CAN.sendMsgBuf(0x00, 0, 8, stmp); //send out the message 'stmp' to the bus and tell other devices this is a standard frame from 0x00.
+```
+
+### 6.Receive Data
+
+The following function is used to receive data on the 'receive' node:
+
+```cpp
+CAN.readMsgBuf(unsigned char len, unsigned char buf);
+```
+
+In conditions that masks and filters have been set. This function can only get frames that meet the requirements of masks and filters.
+
+- **len** represents the data length.
+- **buf** is where you store the data.
+
+### 7.init_CS
+
+it is very usefule for you to use two CAN-BUS shields with one Arduino.we provide CS_CAN pin to select for you.if you cannot kown how to use CS_CAN pin , you can go to [CS_CAN pin](https://wiki.seeedstudio.com/CAN-BUS_Shield_V2.0/#cs_can-pin) to learn.
+
+```cpp
+void MCP_CAN::init_CS(byte _CS)
+```
+
+- **_CS** represents what you select pin.(9 or 10)
+
+## Generate a New BaudRate
+
+We had provided many frequently-used baud rates, as below:
+
+```cpp
+#define CAN_5KBPS 1
+#define CAN_10KBPS 2
+#define CAN_20KBPS 3
+#define CAN_25KBPS 4
+#define CAN_31KBPS 5
+#define CAN_33KBPS 6
+#define CAN_40KBPS 7
+#define CAN_50KBPS 8
+#define CAN_80KBPS 9
+#define CAN_83KBPS 10
+#define CAN_95KBPS 11
+#define CAN_100KBPS 12
+#define CAN_125KBPS 13
+#define CAN_200KBPS 14
+#define CAN_250KBPS 15
+#define CAN_500KBPS 16
+#define CAN_666KBPS 17
+#define CAN_1000KBPS 18
+```
+
+Yet you may still can't find the rate you want. Here we provide a software to help you to calculate the baud rate you need.
+
+Click [here](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/CAN_Baudrate_CalcV1.3.zip) to download the software, it's in Chinese, but never mind, it's easy to use.
+
+
+Open the software, what you need to do is to set the baud rate you want, and then do some simple setting, then click **calculate**.
+
+Then you will get some data, cfg1, cfg2 and cfg3.
+
+You need to add some code to the library.
+
+Open **mcp_can_dfs.h**, you need to add below code at about line 272:
+
+```cpp
+#define MCP_16MHz_xxxkBPS_CFG1 (cfg1) // xxx is the baud rate you need
+#define MCP_16MHz_xxxkBPS_CFG2 (cfg2)
+#define MCP_16MHz_xxxkBPS_CFG3 (cfg2)
+```
+
+Then let's go to about line 390, add below code:
+
+```cpp
+#define CAN_xxxKBPS NUM // xxx is the baudrate you need, and NUM is a number, you need to get a different from the other rates.
+```
+
+Open **mcp_can.cpp**, goto the function **mcp2515_configRate**(at about line 190), then add below code:
+
+```cpp
+case (CAN_xxxKBPS):
+ cfg1 = MCP_16MHz_xxxkBPS_CFG1;
+ cfg2 = MCP_16MHz_xxxkBPS_CFG2;
+ cfg3 = MCP_16MHz_xxxkBPS_CFG3;
+ break;
+```
+
+Then you can use the baud rate you need. And please give me a pull request at github when you use a new rate, so I can add it to the library to help other guys.
+
+## Projects
+
+If you want to make some awesome projects with CAN-BUS shield, here are some projects for reference.
+
+### Volkswagen CAN BUS Gaming
+
+
+Ever wanted to play a car/truck simulator with a real dashboard on your PC? Me too! I'm trying to control a VW Polo 6R dashboard via CAN Bus with an Arduino Uno and a Seeed CAN Bus Shield. Inspired by Silas Parker. Thanks Sepp and Is0-Mick for their great support!
+
+
+
+### Hack your vehicle CAN-BUS
+
+
+Modern Vehicles all come equipped with a CAN-BUS Controller Area Network, Instead of having a million wires running back and forth from various devices in your car to the battery, its making use of a more clever system.
+
+All electronic functions are connected to the TIPM, (Totally integrated Power Module), such as solenoids/relays to lock the doors or mini motors to wind the windows etc.
+
+From each node (IE Switch pod that controls your windows or electric door locks) it broadcasts a message across the CAN. When the TIPM detects a valid message it will react accordingly like, lock the doors, switch on lights and so on.
+
+
+
+## FAQ
+
+------
+**Q1: I can't get data from other CAN device.**
+
+- Check if the connection is right
+- Check if the baud rate setting is right
+
+**Q2: The serial monitor print Init Fail.**
+
+- Check if the CS pin setting is matched with the code. For CAN Bus Shield V1.1/1.2, CS pin is connected to D9, others are to D10.
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+-----
+
+- **[PDF]**[CAN-BUS Shield V2.0 Schmatics](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%20Shield%20%20v2.0.pdf)
+- **[Eagle]**[Schematic & PCB of CAN-BUS Shield V2.0](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%20Shield%20%20v2.0.rar)
+- **[Library]**[Arduino Library for CAN-BUS Shield](https://github.com/Seeed-Studio/CAN_BUS_Shield)
+- **[Datasheet]**[MCP2515 datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/MCP2515.pdf)
+- **[Datasheet]**[MCP2551 datasheet](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/Mcp2551.pdf)
+- **[Demo]**[An OBD Demo](https://github.com/Seeed-Studio/CANBUS_SHIELD_OBD_RECIPLE)
+- **[Tool]**[MCP2515 Baud Rate Tool](https://files.seeedstudio.com/wiki/CAN_BUS_Shield/resource/CAN_Baudrate_CalcV1.3.zip)
+- **[Tool]**[USB-CAN Analyzer](https://www.seeedstudio.com/USB-CAN-Analyzer-p-2888.html)
+- **[Cable]**[DB9 to OBD2 Cable](https://www.seeedstudio.com/DB9-to-OBD2-Cable-With-Switch-p-2872.html)
+- **[Drawing]**[CAN BUS Shield v2.0 Drawing in PDF](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%C2%A0SHIELD%C2%A0V2.0.pdf)
+- **[Drawing]**[CAN BUS Shield v2.0 Drawing in DXF](https://files.seeedstudio.com/wiki/CAN-BUS-Shield-V2.0/res/CAN-BUS%C2%A0SHIELD%C2%A0V2.0.dxf.zip)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-Camera Shield is the first shield board that support photograph, it is based on the solution of **VC0706 + OV7725**, the former is a high performance camera processor with enhanced image processing functions and it embedded the hard-wired JPEG codec, and the latter is a high-performance 1/4 inch, single-chip VGA camera and image processor in a small footprint package. We have written our library to control the Camera Shield via UART/SPI, which makes it possible to take picture easily by your Arduino board. Come on and use it to take a photo!
-
-## Specification
-
----
-
-* Fully Compatible with Arduino or Seeeduino
-
-* Still Picture Resolution: (640x480) JPEG Output
-
-* High Speed Serial Bus Control: UART/SPI
-
-* Integrated MicroSD card Interface
-
-* Power Supply: 5 V
-
-## Hardware Interface
-
----
-Camera Shield can be controlled via SPI or UART interface.
-
-
-
-
-
-## Getting Started
-
----
-Here is a brief introduction to use Camera Shield.
-
-1. Download the [Camera Shield library](https://github.com/Seeed-Studio/Camera_Shield_VC0706) file from gitHub and then extract the library file to your Arduino libraries folder.
-
-2. Open the example folder in libraries/Camera_Shield_VC0706, you will find the snapshot example sketch, double click the snapshot.ino file to open it with arduino IDE.
-
-3. We arrange the library to make it possible to control the Camera Shield via Software Serial/Hardware Serial/SPI, you can have your choice via modifying the code.
-
-```cpp
-#include "SoftwareSerial.h"
-#include
-#include
-#include
-#define SS_SD 10
-
-//use software serial
-SoftwareSerial cameraconnection(2,3);//Rx, Tx
-VC0706 cam = VC0706(&cameraconnection);
-//use hardware serial
-//VC0706 cam = VC0706(&Serial1);
-
-void setup()
-{
- Serial.begin(9600);
- Serial.println("VC0706 Camera Snapshot Test ...");
-
- if (!SD.begin(SS_SD)) {
- Serial.println("SD Card init failed...");
- return;
- }
- if(true == cameraInit()){
- snapShot();
- }else{
- Serial.println("camera init error...");
- }
-}
-
-void loop()
-{
- //nothing to do
-}
-
-bool cameraInit()
-{
- cam.begin(BaudRate_19200);
- char *reply = cam.getVersion();
- if (reply == 0) {
- Serial.println("Failed to get version");
- return false;
- } else {
- Serial.println("version:");
- Serial.println("-----------------");
- Serial.println(reply);
- Serial.println("-----------------");
- return true;
- }
-}
-
-void snapShot()
-{
- Serial.println("Snap in 3 secs...");
- delay(3000);
- if (! cam.takePicture()){
- Serial.println("Failed to snap!");
- }else {
- Serial.println("Picture taken!");
- }
- // Create an image with the name IMAGExx.JPG
- char filename[13];
- strcpy(filename, "IMAGE00.JPG");
- for (int i = 0; i < 100; i++) {
- filename[5] = '0' + i/10;
- filename[6] = '0' + i%10;
- // create if does not exist, do not open existing, write, sync after write
- if (! SD.exists(filename)) {
- break;
- }
- }
- // Open the file for writing
- File imgFile = SD.open(filename, FILE_WRITE);
- Serial.print("create ");
- Serial.println(filename);
- uint16_t jpglen = cam.getFrameLength();
- Serial.print("wait to fetch ");
- Serial.print(jpglen, DEC);
- Serial.println(" byte image ...");
- int32_t time = millis();
- cam.getPicture(jpglen);
- uint8_t *buffer;
- while(jpglen != 0){
- uint8_t bytesToRead = min(32, jpglen);
- buffer = cam.readPicture(bytesToRead);
- imgFile.write(buffer, bytesToRead);
- //Serial.print("Read "); Serial.print(bytesToRead, DEC); Serial.println(" bytes");
- jpglen -= bytesToRead;
- }
- imgFile.close();
- time = millis() - time;
- Serial.println("Done!");
- Serial.print("Took "); Serial.print(time); Serial.println(" ms");
- cam.resumeVideo();
-}
-```
-
-**use Hardware Serial or Software Serial for communication**
-
-we use Serial(Software Serial or Hardware serial) to communicate with Camera Shield, you can generate your applicance like below:
-
-```cpp
-//use software serial
-SoftwareSerial cameraconnection(2,3);//Rx, Tx
-VC0706 cam = VC0706(&cameraconnection);
-```
-
-or if you want to use the hardware serial, you can do it like below:
-
-```cpp
-//use hardware serial
-VC0706 cam = VC0706(&Serial1);
-```
-
-We use the software serial by default. If hardware serial is your choise, you need to modify the code in VC0706_UART head file. Change
-
-```cpp
-#define USE_SOFTWARE_SERIAL 1
-```
-
-to
-
-```cpp
-#define USE_SOFTWARE_SERIAL 0
-```
-
-**Use UART or SPI for data transmission**
-
-Usually, you can take a picture by the following steps:
-
-```cpp
-cam.takePicture();
-uint16_t jpglen = cam.getFrameLength();
-cam.getPicture(jpglen);
-buffer = cam.readPicture(bytesToRead);
-```
-
-and we allow you to read data via two mode:
-
-* 1. UART —— slower mode. Software Serial only support 9600/19200 baud rate. Hardware Serial can be 115200/38400/19200/9600. It will take about 30s to get a picture if you choose the uart mode and at 19200 baud rate.
-* 2. SPI —— faster mode. It will only take about 1s or 2s to get the whole picture back.
-
-You can choose your mode in VC0706_UART header file. We use the SPI mode by default.
-
-```cpp
-#define TRANSFER_BY_SPI 1
-```
-
-change it to
-
-```cpp
-#define TRANSFER_BY_SPI 0
-```
-
-to use the UART mode.
-
-4. Stack the Camera Shield onto Arduino and Insert a mocro-SD card to the Camera Shield, you should pay attention to the serial jumpers that you defined in you code.
-
-5. Compile the sketch and upload it to your arduino board. Open the Serial port of Arduino IDE, you can see the debug information shown from the Serial port. and the SD card status LED will blink quickly during the data transfer.
-
-6. When the program finishes, pull out the SD card and insert it to your computer, you can see your photos. Have fun
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-* [Camera Shield Library on gitHub](https://github.com/Seeed-Studio/Camera_Shield_VC0706)
-
-* [Schematic of Camera Shield](https://files.seeedstudio.com/wiki/Camera_Shield/res/CameraShield-Schematic.zip)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+Camera Shield is the first shield board that support photograph, it is based on the solution of **VC0706 + OV7725**, the former is a high performance camera processor with enhanced image processing functions and it embedded the hard-wired JPEG codec, and the latter is a high-performance 1/4 inch, single-chip VGA camera and image processor in a small footprint package. We have written our library to control the Camera Shield via UART/SPI, which makes it possible to take picture easily by your Arduino board. Come on and use it to take a photo!
+
+## Specification
+
+---
+
+* Fully Compatible with Arduino or Seeeduino
+
+* Still Picture Resolution: (640x480) JPEG Output
+
+* High Speed Serial Bus Control: UART/SPI
+
+* Integrated MicroSD card Interface
+
+* Power Supply: 5 V
+
+## Hardware Interface
+
+---
+Camera Shield can be controlled via SPI or UART interface.
+
+
+
+
+
+## Getting Started
+
+---
+Here is a brief introduction to use Camera Shield.
+
+1. Download the [Camera Shield library](https://github.com/Seeed-Studio/Camera_Shield_VC0706) file from gitHub and then extract the library file to your Arduino libraries folder.
+
+2. Open the example folder in libraries/Camera_Shield_VC0706, you will find the snapshot example sketch, double click the snapshot.ino file to open it with arduino IDE.
+
+3. We arrange the library to make it possible to control the Camera Shield via Software Serial/Hardware Serial/SPI, you can have your choice via modifying the code.
+
+```cpp
+#include "SoftwareSerial.h"
+#include
+#include
+#include
+#define SS_SD 10
+
+//use software serial
+SoftwareSerial cameraconnection(2,3);//Rx, Tx
+VC0706 cam = VC0706(&cameraconnection);
+//use hardware serial
+//VC0706 cam = VC0706(&Serial1);
+
+void setup()
+{
+ Serial.begin(9600);
+ Serial.println("VC0706 Camera Snapshot Test ...");
+
+ if (!SD.begin(SS_SD)) {
+ Serial.println("SD Card init failed...");
+ return;
+ }
+ if(true == cameraInit()){
+ snapShot();
+ }else{
+ Serial.println("camera init error...");
+ }
+}
+
+void loop()
+{
+ //nothing to do
+}
+
+bool cameraInit()
+{
+ cam.begin(BaudRate_19200);
+ char *reply = cam.getVersion();
+ if (reply == 0) {
+ Serial.println("Failed to get version");
+ return false;
+ } else {
+ Serial.println("version:");
+ Serial.println("-----------------");
+ Serial.println(reply);
+ Serial.println("-----------------");
+ return true;
+ }
+}
+
+void snapShot()
+{
+ Serial.println("Snap in 3 secs...");
+ delay(3000);
+ if (! cam.takePicture()){
+ Serial.println("Failed to snap!");
+ }else {
+ Serial.println("Picture taken!");
+ }
+ // Create an image with the name IMAGExx.JPG
+ char filename[13];
+ strcpy(filename, "IMAGE00.JPG");
+ for (int i = 0; i < 100; i++) {
+ filename[5] = '0' + i/10;
+ filename[6] = '0' + i%10;
+ // create if does not exist, do not open existing, write, sync after write
+ if (! SD.exists(filename)) {
+ break;
+ }
+ }
+ // Open the file for writing
+ File imgFile = SD.open(filename, FILE_WRITE);
+ Serial.print("create ");
+ Serial.println(filename);
+ uint16_t jpglen = cam.getFrameLength();
+ Serial.print("wait to fetch ");
+ Serial.print(jpglen, DEC);
+ Serial.println(" byte image ...");
+ int32_t time = millis();
+ cam.getPicture(jpglen);
+ uint8_t *buffer;
+ while(jpglen != 0){
+ uint8_t bytesToRead = min(32, jpglen);
+ buffer = cam.readPicture(bytesToRead);
+ imgFile.write(buffer, bytesToRead);
+ //Serial.print("Read "); Serial.print(bytesToRead, DEC); Serial.println(" bytes");
+ jpglen -= bytesToRead;
+ }
+ imgFile.close();
+ time = millis() - time;
+ Serial.println("Done!");
+ Serial.print("Took "); Serial.print(time); Serial.println(" ms");
+ cam.resumeVideo();
+}
+```
+
+**use Hardware Serial or Software Serial for communication**
+
+we use Serial(Software Serial or Hardware serial) to communicate with Camera Shield, you can generate your applicance like below:
+
+```cpp
+//use software serial
+SoftwareSerial cameraconnection(2,3);//Rx, Tx
+VC0706 cam = VC0706(&cameraconnection);
+```
+
+or if you want to use the hardware serial, you can do it like below:
+
+```cpp
+//use hardware serial
+VC0706 cam = VC0706(&Serial1);
+```
+
+We use the software serial by default. If hardware serial is your choise, you need to modify the code in VC0706_UART head file. Change
+
+```cpp
+#define USE_SOFTWARE_SERIAL 1
+```
+
+to
+
+```cpp
+#define USE_SOFTWARE_SERIAL 0
+```
+
+**Use UART or SPI for data transmission**
+
+Usually, you can take a picture by the following steps:
+
+```cpp
+cam.takePicture();
+uint16_t jpglen = cam.getFrameLength();
+cam.getPicture(jpglen);
+buffer = cam.readPicture(bytesToRead);
+```
+
+and we allow you to read data via two mode:
+
+* 1. UART —— slower mode. Software Serial only support 9600/19200 baud rate. Hardware Serial can be 115200/38400/19200/9600. It will take about 30s to get a picture if you choose the uart mode and at 19200 baud rate.
+* 2. SPI —— faster mode. It will only take about 1s or 2s to get the whole picture back.
+
+You can choose your mode in VC0706_UART header file. We use the SPI mode by default.
+
+```cpp
+#define TRANSFER_BY_SPI 1
+```
+
+change it to
+
+```cpp
+#define TRANSFER_BY_SPI 0
+```
+
+to use the UART mode.
+
+4. Stack the Camera Shield onto Arduino and Insert a mocro-SD card to the Camera Shield, you should pay attention to the serial jumpers that you defined in you code.
+
+5. Compile the sketch and upload it to your arduino board. Open the Serial port of Arduino IDE, you can see the debug information shown from the Serial port. and the SD card status LED will blink quickly during the data transfer.
+
+6. When the program finishes, pull out the SD card and insert it to your computer, you can see your photos. Have fun
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+* [Camera Shield Library on gitHub](https://github.com/Seeed-Studio/Camera_Shield_VC0706)
+
+* [Schematic of Camera Shield](https://files.seeedstudio.com/wiki/Camera_Shield/res/CameraShield-Schematic.zip)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-Energy Shield is a LiPo battery based power shield that keeps your project alive. It keeps its battery charged whenever an available power source exists. It accepts a wide range of power sources, from common solar cells via JST connector and USB via USB port on microcontroller, to 9V and 12V DC adapters via DC Jack on your Arduino. Meanwhile it can not only provide power for your Arduino project, with a standard USB port populated on the shield, it’s also capable of rescuing your mobile electric devices from dying batteries, such as mobile phone, mp3 and tablet.
-
-
-
-## Features
-
-- Accept wide range of power inputs
-- Overvoltage protection
-- 85%+ high power conversion efficiency
-- Comprehensive LEDs indicators for charging and working status
-
-## Specifications
-
-**Power Output Specifications**
-
-
-
-
-
Item
-
Min
-
Typical
-
Max
-
Unit
-
-
-
voltage
-
4.9
-
5
-
5.1
-
V
-
-
-
current
-
5
-
/
-
750
-
mA
-
-
-
-**Power Input Specifications via JST Connector**
-
-| Item | Min | Typical | Max | Unit |
-|--------------------|-----|---------|-----|------|
-| Effective Voltage | 4.5 | 5 | 5.5 | V |
-| Current | 1 | / | 800 | mA |
-| Protection Voltage | / | / | 12 | V |
-
-
-
-
-
Item
-
Min
-
Typical
-
Max
-
Unit
-
-
-
Effective Voltage
-
4.5
-
5
-
5.5
-
V
-
-
-
current
-
1
-
/
-
800
-
mA
-
-
-
Protection Voltage
-
/
-
/
-
12
-
V
-
-
-
-**Working Mode Explanation**
-
-Energy shield can draw current from three different ports to charge the battery, including JST connector, USB port @ Arduino and DC jack. The voltage ranges vary as below:
-
-
-When input voltage is under 6.6V, you can switch the working mode of Energy Shield between “Charge” and “ON” via the working mode select switch. In “Charge” condition, Lipo battery doesn’t output but only pull current from any existing power source. In “ON” condition, the battery gets charged as well as supplies power to the whole system.
-
-However when input voltage exceeds 6.6V, Energy Shield is forced to enter the “Charge” mode regardless of the switch status.
-
-## Hardware Overview
-
----------
-
-
-**Hardware Config**
-
-U1: ISL97516 IC, boost chip;
-
-U3: CN3065 IC, charge management chip;
-
-U4,U8: LM293D IC, dual differential comparators;
-
-Charge Indicator: it lights in charging status;
-
-Capacity Indicator: indicate the remaining life of battery;
-
-SW2 Button: check the capacity of battery;
-
-**Pins Used on Arduino**
-
-Vin pin: convey power from DC jack to charge battery;
-
-5V pin: convey power from USB port to charge battery;
-
-**Other Interfaces**
-
-JST socket:provided for external power sources that requires JST connector, like solar panel;
-
-Battery socket: used to hook up LiPo battery;
-
-USB port: output 5V for other devices;
-
-Usage
------
-
-### 1. Charge Examples
-
-You can charge the Lipo battery with massive external power sources. Here we show you usages of two common powersources.
-
-**1) Solar Panel**
-
-Solar panel is one of the most common green power sources we use. The typical output of one unit is around 5V. We provide [lots of solar panels](https://www.seeedstudio.com/s/solar%20panel.html) at our store. They are all pre-assembled with JST connencors which can seamlessly match up with Energy Shield.
-
-Plug solar panel into JST socket on the shield as below.
-
-:::note
-Make sure there is sufficient light to provide considerable current.
-:::
-
-
-
-Now, press down SW2. You will find the "Charge" indicator LED lights up. The other indicator "Capacity" indicates remaining power of battery. When the remaining power is below 30%, it turns red. When remaining power is between 30% - 80%, it turns yellow. Otherwise it's green.
-
-
-**2) 9V Adaptor**
-
-If you are using a DC adaptor to supply power to your project, then 9V adaptor won't be unfamiliar to you. By connecting a 9V adapter to DC Jack of Arduino, you can run your project as well as charge the battery simultaneously.
-
-
-
-
-
-### 2. Shield power for device
-
-**1) Supply Power For Arduino**
-
-
-
-Switch the working mode select switch to "ON". Check on the power indicator LED on Arduino to see if it works appropriately.
-
-**2) Supply Power For Mobile Devices**
-
-
-
-Use the standard USB port on the shield to supply power to mobile devices.
-
-### 3. Conversion Efficiency
-
-
-
-The graph above describes the conversion efficiency of boost circuit of Energy Shield. Boost circuit boosts the voltage of Lipo battery, which is typically 4.2V or 3.7V with the drop of remaining power, to 5V and supplies outward. You can find this conversion efficiency peaks when output current is around 200mA.
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-- [Energy Shield Eagle File](https://files.seeedstudio.com/wiki/Energy_Shield/res/Energy_Shield_Eagel_File.zip)
-- [CN3065 Datasheet](http://www.consonance-elec.com/pdf/datasheet/DSE-CN3065.pdf)
-- [ISL97516 Datasheet](https://files.seeedstudio.com/wiki/Energy_Shield/res/ISL97516.pdf)
-- [LM293D Datasheet](https://files.seeedstudio.com/wiki/Energy_Shield/res/LM293D.pdf)
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+Energy Shield is a LiPo battery based power shield that keeps your project alive. It keeps its battery charged whenever an available power source exists. It accepts a wide range of power sources, from common solar cells via JST connector and USB via USB port on microcontroller, to 9V and 12V DC adapters via DC Jack on your Arduino. Meanwhile it can not only provide power for your Arduino project, with a standard USB port populated on the shield, it’s also capable of rescuing your mobile electric devices from dying batteries, such as mobile phone, mp3 and tablet.
+
+
+
+## Features
+
+- Accept wide range of power inputs
+- Overvoltage protection
+- 85%+ high power conversion efficiency
+- Comprehensive LEDs indicators for charging and working status
+
+## Specifications
+
+**Power Output Specifications**
+
+
+
+
+
Item
+
Min
+
Typical
+
Max
+
Unit
+
+
+
voltage
+
4.9
+
5
+
5.1
+
V
+
+
+
current
+
5
+
/
+
750
+
mA
+
+
+
+**Power Input Specifications via JST Connector**
+
+| Item | Min | Typical | Max | Unit |
+|--------------------|-----|---------|-----|------|
+| Effective Voltage | 4.5 | 5 | 5.5 | V |
+| Current | 1 | / | 800 | mA |
+| Protection Voltage | / | / | 12 | V |
+
+
+
+
+
Item
+
Min
+
Typical
+
Max
+
Unit
+
+
+
Effective Voltage
+
4.5
+
5
+
5.5
+
V
+
+
+
current
+
1
+
/
+
800
+
mA
+
+
+
Protection Voltage
+
/
+
/
+
12
+
V
+
+
+
+**Working Mode Explanation**
+
+Energy shield can draw current from three different ports to charge the battery, including JST connector, USB port @ Arduino and DC jack. The voltage ranges vary as below:
+
+
+When input voltage is under 6.6V, you can switch the working mode of Energy Shield between “Charge” and “ON” via the working mode select switch. In “Charge” condition, Lipo battery doesn’t output but only pull current from any existing power source. In “ON” condition, the battery gets charged as well as supplies power to the whole system.
+
+However when input voltage exceeds 6.6V, Energy Shield is forced to enter the “Charge” mode regardless of the switch status.
+
+## Hardware Overview
+
+---------
+
+
+**Hardware Config**
+
+U1: ISL97516 IC, boost chip;
+
+U3: CN3065 IC, charge management chip;
+
+U4,U8: LM293D IC, dual differential comparators;
+
+Charge Indicator: it lights in charging status;
+
+Capacity Indicator: indicate the remaining life of battery;
+
+SW2 Button: check the capacity of battery;
+
+**Pins Used on Arduino**
+
+Vin pin: convey power from DC jack to charge battery;
+
+5V pin: convey power from USB port to charge battery;
+
+**Other Interfaces**
+
+JST socket:provided for external power sources that requires JST connector, like solar panel;
+
+Battery socket: used to hook up LiPo battery;
+
+USB port: output 5V for other devices;
+
+Usage
+-----
+
+### 1. Charge Examples
+
+You can charge the Lipo battery with massive external power sources. Here we show you usages of two common powersources.
+
+**1) Solar Panel**
+
+Solar panel is one of the most common green power sources we use. The typical output of one unit is around 5V. We provide [lots of solar panels](https://www.seeedstudio.com/s/solar%20panel.html) at our store. They are all pre-assembled with JST connencors which can seamlessly match up with Energy Shield.
+
+Plug solar panel into JST socket on the shield as below.
+
+:::note
+Make sure there is sufficient light to provide considerable current.
+:::
+
+
+
+Now, press down SW2. You will find the "Charge" indicator LED lights up. The other indicator "Capacity" indicates remaining power of battery. When the remaining power is below 30%, it turns red. When remaining power is between 30% - 80%, it turns yellow. Otherwise it's green.
+
+
+**2) 9V Adaptor**
+
+If you are using a DC adaptor to supply power to your project, then 9V adaptor won't be unfamiliar to you. By connecting a 9V adapter to DC Jack of Arduino, you can run your project as well as charge the battery simultaneously.
+
+
+
+
+
+### 2. Shield power for device
+
+**1) Supply Power For Arduino**
+
+
+
+Switch the working mode select switch to "ON". Check on the power indicator LED on Arduino to see if it works appropriately.
+
+**2) Supply Power For Mobile Devices**
+
+
+
+Use the standard USB port on the shield to supply power to mobile devices.
+
+### 3. Conversion Efficiency
+
+
+
+The graph above describes the conversion efficiency of boost circuit of Energy Shield. Boost circuit boosts the voltage of Lipo battery, which is typically 4.2V or 3.7V with the drop of remaining power, to 5V and supplies outward. You can find this conversion efficiency peaks when output current is around 200mA.
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+- [Energy Shield Eagle File](https://files.seeedstudio.com/wiki/Energy_Shield/res/Energy_Shield_Eagel_File.zip)
+- [CN3065 Datasheet](http://www.consonance-elec.com/pdf/datasheet/DSE-CN3065.pdf)
+- [ISL97516 Datasheet](https://files.seeedstudio.com/wiki/Energy_Shield/res/ISL97516.pdf)
+- [LM293D Datasheet](https://files.seeedstudio.com/wiki/Energy_Shield/res/LM293D.pdf)
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-Grove - Mega Shield is a extension board for Arduino Mega and Google ADK. We have standardized all the connectors into 4 pins(Signal 1,Signal 2,VCC and GND) 2mm connectors and keep some of the 3pin(Signal, VCC and GND ) 2.54mm headers for Servo and Electronic Bricks , which simplify the wiring of electronics projects. The 4pins buckled connectors also make the wiring situation more stable. The Mega Shield includes Digital 0 - 21 and Analog 0 - 15; We abandon Digital 22 - 53 for easily installing Mega Shield with Xduino Mega/Google ADK.
-
-
-
-## Features
----
-- Arduino Mega1280/2560 compatible
-- Grove compatible
-- Google ADK compatible
-- Dimensions: 92.8 mm X 57.2 mm.
-
-## Function Block
----
-The purpose of the Grove - Mega Shield is to allow easy connection of Xduino Mega/Google ADK input and output pins to the Grove units.
-
-Each socket is clearly labelled with its matching I/O pin. the Grove - Mega Shield can be divided into four sections: Reset Button, Analog Area, Digital Area and Power Area.
-Please consider the following diagram:
-
-
-
-The Digital Area of Grove - Mega Shield can also be partitioned into four sections according to different function of GPIO: IIC( 3 connectors ), UART( UART0-3 ), PWM ( PWM2-13 ) and ICSP( not connector ). Please be aware that PWM have two ways of appearance: 3Pin 2.54mm Header and our standard 4Pin 2mm connector. Those two forms of appearance serve different purpose, 4Pin 2mm connectors can connect to our standard Groves while 3Pin 2.54mm Header can connect to Servo, Ultra Sonic range measurement module and Electronic Bricks. Please be aware that When using 3Pin and 4Pin modules on PWM at the same time, Do take extra attention in case of multi-using the same GPIO. Please refer to the following diagram:
-
-
-
-# Grove - Mega Shield
-
-
-
-
-# Grove - Mega Shield v1.1
-
-
-
-
-
-## Resources
----
-- [Eagle File of Grove - Mega Shield.](https://files.seeedstudio.com/wiki/Grove-Mega_Shield/res/Eagle_file_of_Megashield.zip)
-- [Eagle File of Grove - Mega Shield v1.1.](https://files.seeedstudio.com/wiki/Grove-Mega_Shield/res/Eagle_file_of_Megashield_v1.1.zip)
-
-## Tech Support & Product Discussion
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+Grove - Mega Shield is a extension board for Arduino Mega and Google ADK. We have standardized all the connectors into 4 pins(Signal 1,Signal 2,VCC and GND) 2mm connectors and keep some of the 3pin(Signal, VCC and GND ) 2.54mm headers for Servo and Electronic Bricks , which simplify the wiring of electronics projects. The 4pins buckled connectors also make the wiring situation more stable. The Mega Shield includes Digital 0 - 21 and Analog 0 - 15; We abandon Digital 22 - 53 for easily installing Mega Shield with Xduino Mega/Google ADK.
+
+
+
+## Features
+---
+- Arduino Mega1280/2560 compatible
+- Grove compatible
+- Google ADK compatible
+- Dimensions: 92.8 mm X 57.2 mm.
+
+## Function Block
+---
+The purpose of the Grove - Mega Shield is to allow easy connection of Xduino Mega/Google ADK input and output pins to the Grove units.
+
+Each socket is clearly labelled with its matching I/O pin. the Grove - Mega Shield can be divided into four sections: Reset Button, Analog Area, Digital Area and Power Area.
+Please consider the following diagram:
+
+
+
+The Digital Area of Grove - Mega Shield can also be partitioned into four sections according to different function of GPIO: IIC( 3 connectors ), UART( UART0-3 ), PWM ( PWM2-13 ) and ICSP( not connector ). Please be aware that PWM have two ways of appearance: 3Pin 2.54mm Header and our standard 4Pin 2mm connector. Those two forms of appearance serve different purpose, 4Pin 2mm connectors can connect to our standard Groves while 3Pin 2.54mm Header can connect to Servo, Ultra Sonic range measurement module and Electronic Bricks. Please be aware that When using 3Pin and 4Pin modules on PWM at the same time, Do take extra attention in case of multi-using the same GPIO. Please refer to the following diagram:
+
+
+
+# Grove - Mega Shield
+
+
+
+
+# Grove - Mega Shield v1.1
+
+
+
+
+
+## Resources
+---
+- [Eagle File of Grove - Mega Shield.](https://files.seeedstudio.com/wiki/Grove-Mega_Shield/res/Eagle_file_of_Megashield.zip)
+- [Eagle File of Grove - Mega Shield v1.1.](https://files.seeedstudio.com/wiki/Grove-Mega_Shield/res/Eagle_file_of_Megashield_v1.1.zip)
+
+## Tech Support & Product Discussion
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
\ No newline at end of file
diff --git a/docs/Top_Brand/Arduino/shield/Grove_Shield_for_Arduino_Nano.md b/docs/Top_Brand/Arduino/shield/Grove_Shield_for_Arduino_Nano.md
index ecd36a68f6416..550820351f171 100644
--- a/docs/Top_Brand/Arduino/shield/Grove_Shield_for_Arduino_Nano.md
+++ b/docs/Top_Brand/Arduino/shield/Grove_Shield_for_Arduino_Nano.md
@@ -1,189 +1,186 @@
----
-description: Grove_Shield_for_Arduino_Nano
-title: Grove Shield for Arduino Nano
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Grove_Shield_for_Arduino_Nano
-sku: 103100124
-last_update:
- date: 02/02/2023
- author: Eico
-
-no_comments: false # for Disqus
-
----
-
-
-Grove Shield for Arduino Nano provides you a simple way to connect with Arduino Nano and also Seeeduino Nano. This shield helps you get rid of breadboard and jumper wires by pulling out the pins of the motherboard and expands to 8 Grove connectors. This shield pulls out the pins of the motherboard and expands to 8 Grove connectors, including 3 Grove digital connectors, 3 Grove analog connectors, 1 Grove I2C connector, and 1 Grove UART connector.
-
-
-
-## Specification
-
-
-
-
-
Parameter
-
Value/Range
-
-
-
Operation Temperature
-
-25℃ to +85℃
-
-
-
Analog Ports
-
3
-
-
-
Digital Ports
-
3
-
-
-
UART Ports
-
1
-
-
-
I2C Ports
-
1
-
-
-
Size
-
45mm x40mm
-
-
-
-Grove Shield V1.0 to V1.1, supports the Arduino Nano 33 series development board.
-
-
-
-**V1.1 Change Note**: Add VCC 3.3V/5V Switch
-
-So far, Grove Shield has been upgraded to version v1.3.
-
-
-
-**V1.3 Change Note**: Version V1.3 of the Grove Shield cuts the wires connecting the RST and RSE pins on both sides.
-
-## Compatible Boards
-
-V1.0 Support List:
-
-- [Seeeduino nano](https://www.seeedstudio.com/Seeeduino-Nano-p-4111.html)
-- Arduino nano
-
-V1.1 Support List:
-
-- Arduino Nano
-- Seeeduino Nano
-- Arduino Nano Every
-- Arduino Nano 33 IoT*
-- Arduino Nano 33 BLE*
-- Arduino Nano 33 BLE Sense*
-
-V1.3 Support List:
-
-- Arduino Nano
-- Seeeduino Nano
-- Arduino Nano Every
-- Arduino Nano 33 IoT*
-- Arduino Nano 33 BLE*
-- Arduino Nano 33 BLE Sense*
-- Arduino ESP32 Nano
-
-:::caution
-To work with Arduino 33 serial boards, please switch the VCC power to 3.3V. If the VCC power supply is switched to 5V, the development board may be damaged!
-:::
-
-## Hardware Overview
-
-
-
-- **1-Analog Ports**: include 3 anlog ports, A0, A2, A6.
-- **2-Digital Ports**: include 3 digital ports, D2, D4, D6.
-- **3-UART Port**: 1 UART port.
-- **4-I2C Ports**: 1 I2C ports.
-
-## Getting Started
-
-### Hardware
-
-- Step 1. Prepare the below stuffs:
-
-
-
-- Step 2. Connect Grove - Buzzer to port D4 of Grove Shield
-- Step 3. Connect Grove - Button to port D2 of Grove Shield
-- Step 4. Plug Grove Shield for Arduino Nano into Seeeduino nano
-- Step 5. Connect Seeeduino to PC through a USB cable
-
-
-
-### Software
-
-- Step 1. Copy below code to Arduino IDE and upload to Seeeduino.
-
-```cpp
-const int button = 2; // connect a button
-const int buzzer = 4; // connect a buzzer
-void setup()
-{
- pinMode(button, INPUT); //set button as an INPUT device
- pinMode(buzzer, OUTPUT); //set LED as an OUTPUT device
-}
-void loop()
-{
- int btn = digitalRead(button); //read the status of the button
- digitalWrite(buzzer, btn);
- delay(10);
-}
-```
-
-- Step 2. Press the button and we will hear the buzzer.
-
-## FAQ
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-- **[Eagle]** [Grove shield for Arduino Nano PCB&SCH](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano v1.0PCB&SCH.zip)
-- **[PDF]** [Grove shield for Arduino Nano PCB&SCH](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano v1.0PCB&SCH.pdf)
-- **[SCH]** [Grove shield for Arduino Nano SCH](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano.sch)
-- **[BRD]** [Grove shield for Arduino Nano BRD](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano.brd)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
-
+---
+description: Grove_Shield_for_Arduino_Nano
+title: Grove Shield for Arduino Nano
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /Grove_Shield_for_Arduino_Nano
+sku: 103100124
+last_update:
+ date: 02/02/2023
+ author: Eico
+no_comments: false # for Disqus
+---
+
+
+Grove Shield for Arduino Nano provides you a simple way to connect with Arduino Nano and also Seeeduino Nano. This shield helps you get rid of breadboard and jumper wires by pulling out the pins of the motherboard and expands to 8 Grove connectors. This shield pulls out the pins of the motherboard and expands to 8 Grove connectors, including 3 Grove digital connectors, 3 Grove analog connectors, 1 Grove I2C connector, and 1 Grove UART connector.
+
+
+
+## Specification
+
+
+
+
+
Parameter
+
Value/Range
+
+
+
Operation Temperature
+
-25℃ to +85℃
+
+
+
Analog Ports
+
3
+
+
+
Digital Ports
+
3
+
+
+
UART Ports
+
1
+
+
+
I2C Ports
+
1
+
+
+
Size
+
45mm x40mm
+
+
+
+Grove Shield V1.0 to V1.1, supports the Arduino Nano 33 series development board.
+
+
+
+**V1.1 Change Note**: Add VCC 3.3V/5V Switch
+
+So far, Grove Shield has been upgraded to version v1.3.
+
+
+
+**V1.3 Change Note**: Version V1.3 of the Grove Shield cuts the wires connecting the RST and RSE pins on both sides.
+
+## Compatible Boards
+
+V1.0 Support List:
+
+- [Seeeduino nano](https://www.seeedstudio.com/Seeeduino-Nano-p-4111.html)
+- Arduino nano
+
+V1.1 Support List:
+
+- Arduino Nano
+- Seeeduino Nano
+- Arduino Nano Every
+- Arduino Nano 33 IoT*
+- Arduino Nano 33 BLE*
+- Arduino Nano 33 BLE Sense*
+
+V1.3 Support List:
+
+- Arduino Nano
+- Seeeduino Nano
+- Arduino Nano Every
+- Arduino Nano 33 IoT*
+- Arduino Nano 33 BLE*
+- Arduino Nano 33 BLE Sense*
+- Arduino ESP32 Nano
+
+:::caution
+To work with Arduino 33 serial boards, please switch the VCC power to 3.3V. If the VCC power supply is switched to 5V, the development board may be damaged!
+:::
+
+## Hardware Overview
+
+
+
+- **1-Analog Ports**: include 3 anlog ports, A0, A2, A6.
+- **2-Digital Ports**: include 3 digital ports, D2, D4, D6.
+- **3-UART Port**: 1 UART port.
+- **4-I2C Ports**: 1 I2C ports.
+
+## Getting Started
+
+### Hardware
+
+- Step 1. Prepare the below stuffs:
+
+
+
+- Step 2. Connect Grove - Buzzer to port D4 of Grove Shield
+- Step 3. Connect Grove - Button to port D2 of Grove Shield
+- Step 4. Plug Grove Shield for Arduino Nano into Seeeduino nano
+- Step 5. Connect Seeeduino to PC through a USB cable
+
+
+
+### Software
+
+- Step 1. Copy below code to Arduino IDE and upload to Seeeduino.
+
+```cpp
+const int button = 2; // connect a button
+const int buzzer = 4; // connect a buzzer
+void setup()
+{
+ pinMode(button, INPUT); //set button as an INPUT device
+ pinMode(buzzer, OUTPUT); //set LED as an OUTPUT device
+}
+void loop()
+{
+ int btn = digitalRead(button); //read the status of the button
+ digitalWrite(buzzer, btn);
+ delay(10);
+}
+```
+
+- Step 2. Press the button and we will hear the buzzer.
+
+## FAQ
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+- **[Eagle]** [Grove shield for Arduino Nano PCB&SCH](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano v1.0PCB&SCH.zip)
+- **[PDF]** [Grove shield for Arduino Nano PCB&SCH](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano v1.0PCB&SCH.pdf)
+- **[SCH]** [Grove shield for Arduino Nano SCH](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano.sch)
+- **[BRD]** [Grove shield for Arduino Nano BRD](https://files.seeedstudio.com/products/103100124/res/Grove Shield for Arduino Nano.brd)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-:::note
-This document works for Motor Shield V2.0/2.1/2.2.
-:::
-
-The Motor Shield is a driver module for motors that allows you to use Arduino to control the working speed and direction of the motor. Based on the Dual Full-Bridge Drive Chip L298, it is able to drive two DC motors or a step motor. The Motor Shield can either be powered by Arduino directly or by an external 6V~15V power supply via the terminal input. This module can be used for the development of micro robots and intelligent vehicles, etc
-
-
-
-
-
Version
-
-
-
Revision
-
Descriptions
-
Release
-
-
-
v1.0
-
Initial public release
-
NA
-
-
-
v2.0
-
Enable +5V Pin of Arduino/Seeeduino to power motor
-
2013-2
-
-
-
-## Features
-
--------------------
-
-- Standard Arduino UNO Shield pin out
-- Based on L298 full bridge IC
-- Drive 2 DC Motor or 1 Stepper
-- External power input available
-- Led indicators
-- Heat sink for better performance
-- Arduino library
-
-## Specifications
-
--------------------
-
-
-
-
-
Spec
-
Value
-
-
-
Operating voltage
-
5V
-
-
-
External Power
-
6-15V
-
-
-
Output Current
-
2.0A Max @ Each Channel
-
-
-
PWM Range
-
0-100%
-
-
-
Output
-
2 Channels, 4 Ports
-
-
-
-## Hardware Overview
-
-
-
-**1**.Channel 1 indicator, include 3 leds
-
-- EB - channel 1 enable, high active
-- IN3 - status of OUT3
-- IN4 - status of OUT4
-
-**2**.Channel 1 Sense - Please connect the left 2 pins together for normal usage.
-
-**Note** that it's a high level application for sense the current, please refer to datasheet and schematic for more information.
-
-**3**.OUTPUT - There're 2 channels, each channel has 2 output
-
-- Channel 0 - OUT1, OUT2
-- Channel 1 - OUT3, OUT4
-
-**4**.Channel 0 Sense
-
-**5**.Channel 0 indicator, include 3 leds
-
-- EB - channel 0 enable, high active
-- IN1 - status of OUT1
-- IN2 - status of OUT2
-
-**6**.External Power Input, range 6-15V
-
-**7**.Reset indicator - turn red when Reset button is pressed
-
-**8**.Reset button - pressed to reset the shield and Arduino
-
-**9**.Power indicator - turn green when power in, either internal or external
-
-**A.** Power switch
-
-- Connect - Get power from Arduino
-- Disconnect - Get power from External sources
-
-**B.** Standard Arduino shield pin out
-
-### Digital Pin Used
-
-
-
-
-
Arduino Pin
-
Function
-
-
-
D0
-
Not Used
-
-
-
D1
-
Not Used
-
-
-
D2
-
Not Used
-
-
-
D3
-
Not Used
-
-
-
D4
-
Not Used
-
-
-
D5
-
Not Used
-
-
-
D6
-
Not Used
-
-
-
D7
-
Not Used
-
-
-
D8
-
OUT1
-
-
-
D9
-
Enable of Channel0
-
-
-
D10
-
Enable of Channel1
-
-
-
D11
-
OUT2
-
-
-
D12
-
OUT3
-
-
-
D13
-
OUT4
-
-
-
-:::note
-D8~D13 are used by Motor Shield. Please don't use those pins to avoid conflict.
-:::
-
-### Analog Pin Used
-
-
-
-
-
Arduino Pin
-
Function
-
-
-
D0
-
Not Used
-
-
-
D1
-
Not Used
-
-
-
D2
-
Not Used
-
-
-
D3
-
Not Used
-
-
-
D4
-
Not Used
-
-
-
D5
-
Not Used
-
-
-
-:::note
-Not Used means you can use those pins freely.
-:::
-
-## Getting Started
-
--------------------
-
-### Drive a DC motor
-
-#### Connection
-
-Here we will show you how this Motor Shield works via a simple demo. First of all, you need to prepare the below stuffs:
-
-
-
-- Set **SEN_A** and **SEN_B**, connect the left 2 pins together with a jumper.
-- Connect **MB_EN** together with a jumper, as we are not going use an external power.
-- Connect DC motor to Chanel 0 (OUT1 and OUT2).
-- Plug Motor Shield into Arduino.
-- Connect Arduino to PC via a USB cable.
-
-
-
-#### Software
-
-- Click below button to download the motor shield library.
-- Please follow [how to install an arduino library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library/) procedures to install the library.
-
-
-
-- Upload the code to Seeeduino V4.
-
-```cpp
-// Demo function:The application method to drive the DC motor.
-// Author:Loovee (luweicong@seeed.cc)
-// 2016-3-11
-
-#include "MotorDriver.h"
-
-MotorDriver motor;
-
-void setup()
-{
- // initialize
- motor.begin();
-}
-
-void loop()
-{
- motor.speed(0, 100); // set motor0 to speed 100
- delay(1000);
- motor.brake(0); // brake
- delay(1000);
- motor.speed(0, -100); // set motor0 to speed -100
- delay(1000);
- motor.stop(0); // stop
- delay(1000);
-}
-// END FILE
-```
-
-- Then you will find your motor move (1s), stop (1s), move back (1s), stop (1s), and loop.
-
-If nothing happens, please make sure:
-
-- We have uploaded the code successfully
-- The motor is connected properly
-- The led indicators blink right
-
-### Drive a Stepper
-
-#### Connection
-
-Here we will show you how this Motor Shield works via a simple demo. First of all, you need to prepare the below stuffs:
-
-
-
-- Set **SEN_A** and **SEN_B**, connect the left 2 pins together with a jumper.
-- Connect **MB_EN** together with a jumper, as we are not going use an external power.
-- Find the pin definitions of you stepper, and connect it to the OUTPUT of the shield. As below:
-
-
-
-
-
stepper
-
OUT1
-
-
-
A+
-
OUT2
-
-
-
A-
-
OUT3
-
-
-
B+
-
OUT4
-
-
-
B-
-
Not Used
-
-
-
-- Plug Motor Shield into Arduino.
-- Connect Arduino to PC via a USB cable.
-
-#### Software
-
-Copy below code to Arduino IDE and upload it to Seeeduino V4, then you will find your stepper move.
-
-```cpp
-/*
- * Stepper test for Seeed Motor Shield V2
- * loovee @ 15 Mar, 2016
- */
-
-#include
-
-// change this to the number of steps on your motor
-#define STEPS 200
-
-// create an instance of the stepper class, specifying
-// the number of steps of the motor and the pins it's
-// attached to
-Stepper stepper(STEPS, 8, 11, 12, 13);
-
-// the previous reading from the analog input
-int previous = 0;
-
-void step(int steps)
-{
- digitalWrite(9, HIGH);
- digitalWrite(10, HIGH);
- stepper.step(steps);
- digitalWrite(9, LOW);
- digitalWrite(10, LOW);
-}
-
-void setup()
-{
- // set the speed of the motor to 30 RPMs
- pinMode(9, OUTPUT);
- pinMode(10, OUTPUT);
- digitalWrite(9, LOW);
- digitalWrite(10, LOW);
- stepper.setSpeed(30);
-}
-
-void loop()
-{
- step(1000);
- step(-1000);
-}
-
-// END FILE
-```
-
-If nothing happens, please double check if you have connected the wire right.
-
-## Library APIs
-
----------
-
-### DC Motor APIs
-
-#### begin
-
-**Description**
-
-```Javascript
-void begin();
-```
-
-#### speed
-
-**Description**
-
-```Javascript
-void move(int motor_id, int speed);
-```
-
-- motor_id
- - 0 - Chanel 0
- - 1 - Chanel 1
-- speed: -100~100, the larger the faster, 0 for stop
-
-**stop**
-
-```Javascript
-void stop(unsigned char motor_id);
-```
-
-**brake**
-
-```Javascript
-void brake(unsigned char motor_id);
-```
-
-#### Stepper
-
-**Note** that we use the library provided by Arduino IDE to drive a stepper.
-
-There's something need to be modified, please refer to the examples.
-
-## FAQs
-
-**Q1: The purpose of the jumper MB_EN**
-
-A1: You can see a power jumper(MB_EN) on the motor shield. If you move it, the Arduino can provide power to Shield, but the shield(if the shield has connected to a external power) can't provide power to Arduino.
-
-If the jumper exists, one can provide power to the other under two situation:
-
-- USB to Arduino: if no external power connected to Shield separately, the Arduino will provide power to Shield via VCC pin.
-
-- External Power connected to Shield:If shield has a separate power, the voltage would through a rectifier(78M05) first, and then provide power to Arduino. At this situation, no current of Arduino could through Arduino to Shield via 78M05.
-
-So the purpose of this jumper is a choice whether you would wanna use shield to provide power to Arduino or not.
-
-**Q2: Is there a pin conflict between the SD card shield (103030005) and the Motor shield (105030001) on Arduino UNO? How to use them together?**
-
-A2: There is a pin conflict between Motor shield and SD card shield in digital pins D11,D12,D13 of the Arduino Uno. So you cannot stack them together with the Arduino Uno board. Here is the solution to use them together.
-
-- Step 1.Stack the SD card shield to the Arduino.
-- Step 2.Modify the library of Motordriver.h as follows.
-
-```cpp
-/******Pins definitions*************/
-#define MOTORSHIELD_IN1 8
-#define MOTORSHIELD_IN2 7
-#define MOTORSHIELD_IN3 6
-#define MOTORSHIELD_IN4 5
-#define SPEEDPIN_A 9
-#define SPEEDPIN_B 10
-```
-
-**Q3.Do not stack the motor shield but make connections separately as follows from the Arduino using jumper wires.**
-
-A3: Here is the connection.
-
-
-
-## Resources
-
--------------------
-
-- **[Eagle]** [Motor Shield V2.0 Eagle File](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_Shield_Eagle_File.zip)
-- **[Eagle]** [Motor shield V2.1 Eagle File](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_shield_2.1.rar)
-- **[PDF]** [Motor Shield 2.0 schematics](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_shield_2.0.pdf)
-- **[PDF]** [Motor Shield 2.1 schematics](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_shield_2.1.pdf)
-- **[PDF]** [Motor Shield 2.2 schematics](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor%20Shield%20v2.2.pdf)
-- **[Library]** [Motor Shield Library](https://github.com/Seeed-Studio/SeeedMotorShieldV2/archive/master.zip)
-- **[Datasheet]** [L298 Datasheet](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/L298.pdf)
-- **[Datasheet]** [78M05 Datasheet](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/78M05_datasheet.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+:::note
+This document works for Motor Shield V2.0/2.1/2.2.
+:::
+
+The Motor Shield is a driver module for motors that allows you to use Arduino to control the working speed and direction of the motor. Based on the Dual Full-Bridge Drive Chip L298, it is able to drive two DC motors or a step motor. The Motor Shield can either be powered by Arduino directly or by an external 6V~15V power supply via the terminal input. This module can be used for the development of micro robots and intelligent vehicles, etc
+
+
+
+
+
Version
+
+
+
Revision
+
Descriptions
+
Release
+
+
+
v1.0
+
Initial public release
+
NA
+
+
+
v2.0
+
Enable +5V Pin of Arduino/Seeeduino to power motor
+
2013-2
+
+
+
+## Features
+
+-------------------
+
+- Standard Arduino UNO Shield pin out
+- Based on L298 full bridge IC
+- Drive 2 DC Motor or 1 Stepper
+- External power input available
+- Led indicators
+- Heat sink for better performance
+- Arduino library
+
+## Specifications
+
+-------------------
+
+
+
+
+
Spec
+
Value
+
+
+
Operating voltage
+
5V
+
+
+
External Power
+
6-15V
+
+
+
Output Current
+
2.0A Max @ Each Channel
+
+
+
PWM Range
+
0-100%
+
+
+
Output
+
2 Channels, 4 Ports
+
+
+
+## Hardware Overview
+
+
+
+**1**.Channel 1 indicator, include 3 leds
+
+- EB - channel 1 enable, high active
+- IN3 - status of OUT3
+- IN4 - status of OUT4
+
+**2**.Channel 1 Sense - Please connect the left 2 pins together for normal usage.
+
+**Note** that it's a high level application for sense the current, please refer to datasheet and schematic for more information.
+
+**3**.OUTPUT - There're 2 channels, each channel has 2 output
+
+- Channel 0 - OUT1, OUT2
+- Channel 1 - OUT3, OUT4
+
+**4**.Channel 0 Sense
+
+**5**.Channel 0 indicator, include 3 leds
+
+- EB - channel 0 enable, high active
+- IN1 - status of OUT1
+- IN2 - status of OUT2
+
+**6**.External Power Input, range 6-15V
+
+**7**.Reset indicator - turn red when Reset button is pressed
+
+**8**.Reset button - pressed to reset the shield and Arduino
+
+**9**.Power indicator - turn green when power in, either internal or external
+
+**A.** Power switch
+
+- Connect - Get power from Arduino
+- Disconnect - Get power from External sources
+
+**B.** Standard Arduino shield pin out
+
+### Digital Pin Used
+
+
+
+
+
Arduino Pin
+
Function
+
+
+
D0
+
Not Used
+
+
+
D1
+
Not Used
+
+
+
D2
+
Not Used
+
+
+
D3
+
Not Used
+
+
+
D4
+
Not Used
+
+
+
D5
+
Not Used
+
+
+
D6
+
Not Used
+
+
+
D7
+
Not Used
+
+
+
D8
+
OUT1
+
+
+
D9
+
Enable of Channel0
+
+
+
D10
+
Enable of Channel1
+
+
+
D11
+
OUT2
+
+
+
D12
+
OUT3
+
+
+
D13
+
OUT4
+
+
+
+:::note
+D8~D13 are used by Motor Shield. Please don't use those pins to avoid conflict.
+:::
+
+### Analog Pin Used
+
+
+
+
+
Arduino Pin
+
Function
+
+
+
D0
+
Not Used
+
+
+
D1
+
Not Used
+
+
+
D2
+
Not Used
+
+
+
D3
+
Not Used
+
+
+
D4
+
Not Used
+
+
+
D5
+
Not Used
+
+
+
+:::note
+Not Used means you can use those pins freely.
+:::
+
+## Getting Started
+
+-------------------
+
+### Drive a DC motor
+
+#### Connection
+
+Here we will show you how this Motor Shield works via a simple demo. First of all, you need to prepare the below stuffs:
+
+
+
+- Set **SEN_A** and **SEN_B**, connect the left 2 pins together with a jumper.
+- Connect **MB_EN** together with a jumper, as we are not going use an external power.
+- Connect DC motor to Chanel 0 (OUT1 and OUT2).
+- Plug Motor Shield into Arduino.
+- Connect Arduino to PC via a USB cable.
+
+
+
+#### Software
+
+- Click below button to download the motor shield library.
+- Please follow [how to install an arduino library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library/) procedures to install the library.
+
+
+
+- Upload the code to Seeeduino V4.
+
+```cpp
+// Demo function:The application method to drive the DC motor.
+// Author:Loovee (luweicong@seeed.cc)
+// 2016-3-11
+
+#include "MotorDriver.h"
+
+MotorDriver motor;
+
+void setup()
+{
+ // initialize
+ motor.begin();
+}
+
+void loop()
+{
+ motor.speed(0, 100); // set motor0 to speed 100
+ delay(1000);
+ motor.brake(0); // brake
+ delay(1000);
+ motor.speed(0, -100); // set motor0 to speed -100
+ delay(1000);
+ motor.stop(0); // stop
+ delay(1000);
+}
+// END FILE
+```
+
+- Then you will find your motor move (1s), stop (1s), move back (1s), stop (1s), and loop.
+
+If nothing happens, please make sure:
+
+- We have uploaded the code successfully
+- The motor is connected properly
+- The led indicators blink right
+
+### Drive a Stepper
+
+#### Connection
+
+Here we will show you how this Motor Shield works via a simple demo. First of all, you need to prepare the below stuffs:
+
+
+
+- Set **SEN_A** and **SEN_B**, connect the left 2 pins together with a jumper.
+- Connect **MB_EN** together with a jumper, as we are not going use an external power.
+- Find the pin definitions of you stepper, and connect it to the OUTPUT of the shield. As below:
+
+
+
+
+
stepper
+
OUT1
+
+
+
A+
+
OUT2
+
+
+
A-
+
OUT3
+
+
+
B+
+
OUT4
+
+
+
B-
+
Not Used
+
+
+
+- Plug Motor Shield into Arduino.
+- Connect Arduino to PC via a USB cable.
+
+#### Software
+
+Copy below code to Arduino IDE and upload it to Seeeduino V4, then you will find your stepper move.
+
+```cpp
+/*
+ * Stepper test for Seeed Motor Shield V2
+ * loovee @ 15 Mar, 2016
+ */
+
+#include
+
+// change this to the number of steps on your motor
+#define STEPS 200
+
+// create an instance of the stepper class, specifying
+// the number of steps of the motor and the pins it's
+// attached to
+Stepper stepper(STEPS, 8, 11, 12, 13);
+
+// the previous reading from the analog input
+int previous = 0;
+
+void step(int steps)
+{
+ digitalWrite(9, HIGH);
+ digitalWrite(10, HIGH);
+ stepper.step(steps);
+ digitalWrite(9, LOW);
+ digitalWrite(10, LOW);
+}
+
+void setup()
+{
+ // set the speed of the motor to 30 RPMs
+ pinMode(9, OUTPUT);
+ pinMode(10, OUTPUT);
+ digitalWrite(9, LOW);
+ digitalWrite(10, LOW);
+ stepper.setSpeed(30);
+}
+
+void loop()
+{
+ step(1000);
+ step(-1000);
+}
+
+// END FILE
+```
+
+If nothing happens, please double check if you have connected the wire right.
+
+## Library APIs
+
+---------
+
+### DC Motor APIs
+
+#### begin
+
+**Description**
+
+```Javascript
+void begin();
+```
+
+#### speed
+
+**Description**
+
+```Javascript
+void move(int motor_id, int speed);
+```
+
+- motor_id
+ - 0 - Chanel 0
+ - 1 - Chanel 1
+- speed: -100~100, the larger the faster, 0 for stop
+
+**stop**
+
+```Javascript
+void stop(unsigned char motor_id);
+```
+
+**brake**
+
+```Javascript
+void brake(unsigned char motor_id);
+```
+
+#### Stepper
+
+**Note** that we use the library provided by Arduino IDE to drive a stepper.
+
+There's something need to be modified, please refer to the examples.
+
+## FAQs
+
+**Q1: The purpose of the jumper MB_EN**
+
+A1: You can see a power jumper(MB_EN) on the motor shield. If you move it, the Arduino can provide power to Shield, but the shield(if the shield has connected to a external power) can't provide power to Arduino.
+
+If the jumper exists, one can provide power to the other under two situation:
+
+- USB to Arduino: if no external power connected to Shield separately, the Arduino will provide power to Shield via VCC pin.
+
+- External Power connected to Shield:If shield has a separate power, the voltage would through a rectifier(78M05) first, and then provide power to Arduino. At this situation, no current of Arduino could through Arduino to Shield via 78M05.
+
+So the purpose of this jumper is a choice whether you would wanna use shield to provide power to Arduino or not.
+
+**Q2: Is there a pin conflict between the SD card shield (103030005) and the Motor shield (105030001) on Arduino UNO? How to use them together?**
+
+A2: There is a pin conflict between Motor shield and SD card shield in digital pins D11,D12,D13 of the Arduino Uno. So you cannot stack them together with the Arduino Uno board. Here is the solution to use them together.
+
+- Step 1.Stack the SD card shield to the Arduino.
+- Step 2.Modify the library of Motordriver.h as follows.
+
+```cpp
+/******Pins definitions*************/
+#define MOTORSHIELD_IN1 8
+#define MOTORSHIELD_IN2 7
+#define MOTORSHIELD_IN3 6
+#define MOTORSHIELD_IN4 5
+#define SPEEDPIN_A 9
+#define SPEEDPIN_B 10
+```
+
+**Q3.Do not stack the motor shield but make connections separately as follows from the Arduino using jumper wires.**
+
+A3: Here is the connection.
+
+
+
+## Resources
+
+-------------------
+
+- **[Eagle]** [Motor Shield V2.0 Eagle File](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_Shield_Eagle_File.zip)
+- **[Eagle]** [Motor shield V2.1 Eagle File](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_shield_2.1.rar)
+- **[PDF]** [Motor Shield 2.0 schematics](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_shield_2.0.pdf)
+- **[PDF]** [Motor Shield 2.1 schematics](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor_shield_2.1.pdf)
+- **[PDF]** [Motor Shield 2.2 schematics](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/Motor%20Shield%20v2.2.pdf)
+- **[Library]** [Motor Shield Library](https://github.com/Seeed-Studio/SeeedMotorShieldV2/archive/master.zip)
+- **[Datasheet]** [L298 Datasheet](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/L298.pdf)
+- **[Datasheet]** [78M05 Datasheet](https://files.seeedstudio.com/wiki/Motor_Shield_V2.0/resource/78M05_datasheet.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-Time to build your real-time MIDI instrument/music player! It can play many format including MP3, WMA, WAV, AAC, MIDI, Ogg Vorbis. The Music Shield is an audio encoder/decoder compatible with Arduino, Seeeduino, Seeeduino Mega and Arduino Mega. It is based on the VC1053B chip, which enabled it to play sound files from SD card and do short-time recording as well. You can also use it to play MIDI notes by slightly changing its hardware installations. Due to the SPI communication mode, it keeps a minimum number of IO port that facilitates users’ own developments of this device. Additionally, the new multifunction button provides greater convenience for users to control.
-
-:::note
-The recording function works with Seeeduino Mega and Arduino Mega only. And the maximum size SD card you can use is 2GB.
-:::
-
-
-
-Hardware Overview
------------------
-
-
-
-**Multifunction button:** Change volume and select songs.
-
-**Play/Pause indicator LED (GREEN):**Blinks while playing.
-
-**Headsets interface:** It can drive 16 ohm or 32 Ohm earphone and could serve as a external audio input port.
-
-**Micro SD card**: Can be FAT16 or FAT32, the maximum size SD card you can use is 2GB.
-
-**U2:** VS1053B IC,Ogg Vorbis/MP3/AAC/WMA/FLAC/MIDI audio codec.
-
-**U3,U7:** 74VHC125 IC, Quad Buffer
-
-**I2S:** For digital audio input/output.
-
-**ISP interface**: for bringing SPI port when using with Mega series products.
-
-***Pins usage on Arduino***
-
-**Pins used for Play Control:**
-
-D3 - Receiving signal from button for Volume Up.
-
-D4 - Receiving signal from switch for Next Song function.
-
-D5 - Receiving signal from switch for Play&Stop and Record function.
-
-D6 - Receiving signal from switch for Previous Song function.
-
-D7 - Receiving signal from button for Volume Down.
-
-D8 - Green Led instructions.
-
-**Pins Used for SPI Interface:**
-
-D10 - SPI Chip Select
-
-D11 - SPI MOSI
-
-D12 - SPI MISO
-
-D13 - SPI SCK
-
-**Pins Used for VS1053 Interface:**
-
-A0 - Reset of VS1053
-
-A1 - Data Require of VS1053
-
-A2 - Data Select of VS1053
-
-A3 - Chip Select of VS1053
-
-Getting Started
----------------
-
-
-
-:::note
-
If you want to use MIDI function, you need to change the hardware installation.
-
If you changed the hardware installation in order to use MIDI function, you are not able to use playback & recording functions until you restore it to the original condition.
-:::
-
-### **Play music**
-
-1. Make sure there are songs in the micro SD card.
-2. Download [Music shield V2.0 library](https://github.com/Seeed-Studio/Music_Shield)
-3. Unzip and copy the folder to Arduino’s library path: ..\arduino-1.0\libraries.
-
-:::note
-
-1. Change the folder name of the extracted library if Arduino throws an error while loading.
-2. Change the included header (to Arduino.h) in the example file if there is a `arduino.h: No such file or directory` error while compiling.
-:::
-
-**Demo 1: Play songs (e.g. in shuffle mode)**
-
-In order to use the playback function, you need to create a playlist first.
-
-1. Restart the Arduino IDE. Open “creatList” example via the path: File --> Examples --> MusicPlayer --> creatList as below.
-
-
-
-2. Set the play mode. In “creatList”, the function we use is described as follows.
-
- **Name:** setPlayMode(unsigned char playmode);
-
- **Function:** Set the play mode. There are four modes you can set: MODE_NORMAL, MODE_SHUFFLE, MODE_REPEAT_LIST, MODE_REPEAT_ONE. Each mode stands for different playing orders.
-
-
-
-3. Select the type of Arduino board that you are using by the path: Tools --> Board --> for example Arduino UNO.
-4. Select the correct serial port you are using by the path: Tools --> Serial Port --> for example COM3.
-5. Upload the code. Click to Serial Monitor when “Done uploading” appears, you will find the order of songs is randomized on the list.
-
-
-
-When multifunction button is pressed up or down, the volume will change. Of course, you can try others play modes.
-
-**Demo 2: Play selected songs**
-
-1. This demo will show you how to play part of the songs from all songs in the SD card. Open the “addToList” example via the path: File --> Examples --> MusicPlayer --> addToList.
-
-
-
-2. Select songs from the playlist.You just need to list songs you want to play by name correctly in the function addToPlayList(char *songName) .
-But you must ensure that the song has been stored in the SD card and the format of those songs must be one of MP3,WMA,WAV,AAC,MIDI,Ogg Vorbis.
-
-3. Upload code. When you complete the upload,new add songs will be played.
-
-**Demo 3: Control Volume by analog port**
-
-1. Plug the Grove-Base Shield onto the Music shield, Connect the Grove socket of the Rotary and analog port 4 of the Base Shield with a Grove cable. You can change to the digital port as well. But don't forget to change the port number in the definition of the demo code at the same time.
-
-
-
-2. Open the “analogInputControl” example and upload it onto your Arduino Board.
-
-3. Rotate the knob to change music volume.
-
-**Demo 4: Record music:(Only support ATmega1280 and ATmega2560 based board)**
-
-1. Upload any sketch in Music Shield library, for example the sketch "creatList". Open the Serial Monitor and it will play audio files on SD card.
-2. Press down the multifunction button for 5 seconds, then the indicator LED will light off.
-3. Press down the multifunction button for 5 seconds again, then the music shield will begin to record, the green indicator LED will blink.
-4. Quickly press down the multifunction button again, it will stop recording.
-5. Record will be played in the last place.
-
-**Demo 5: Using MIDI**
-
-1. This demo will show you how to play notes from 3.5mm using MIDI.Open the "MidiDemoPlayer" example via the path: File --> Examples --> MusicPlayer --> MidiDemoPlayer.
-
-
-
-2. Upload Code to your arduino UNO.
-
-Reference
----------
-
-**MIDI number to note reference list**
-
-
-
-## Schematic Online Viewer
-
-
-
-
-Resources
----------
-
-- [Music Shield V2.2 Eagle Files](https://files.seeedstudio.com/wiki/Music_Shield_V2.2/res/Music_Shield_v2.2.zip)
-- [Music Shield V2.2 Schematic.pdf](https://files.seeedstudio.com/wiki/Music_Shield_V2.2/res/Music_Shield_v2.2_pdf.pdf)
-- [VS1053 Datasheet](https://files.seeedstudio.com/wiki/Music_Shield_V2.2/res/VS1053.pdf)
-- [Music Shield libraries](https://github.com/Seeed-Studio/Music_Shield)
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+Time to build your real-time MIDI instrument/music player! It can play many format including MP3, WMA, WAV, AAC, MIDI, Ogg Vorbis. The Music Shield is an audio encoder/decoder compatible with Arduino, Seeeduino, Seeeduino Mega and Arduino Mega. It is based on the VC1053B chip, which enabled it to play sound files from SD card and do short-time recording as well. You can also use it to play MIDI notes by slightly changing its hardware installations. Due to the SPI communication mode, it keeps a minimum number of IO port that facilitates users’ own developments of this device. Additionally, the new multifunction button provides greater convenience for users to control.
+
+:::note
+The recording function works with Seeeduino Mega and Arduino Mega only. And the maximum size SD card you can use is 2GB.
+:::
+
+
+
+Hardware Overview
+-----------------
+
+
+
+**Multifunction button:** Change volume and select songs.
+
+**Play/Pause indicator LED (GREEN):**Blinks while playing.
+
+**Headsets interface:** It can drive 16 ohm or 32 Ohm earphone and could serve as a external audio input port.
+
+**Micro SD card**: Can be FAT16 or FAT32, the maximum size SD card you can use is 2GB.
+
+**U2:** VS1053B IC,Ogg Vorbis/MP3/AAC/WMA/FLAC/MIDI audio codec.
+
+**U3,U7:** 74VHC125 IC, Quad Buffer
+
+**I2S:** For digital audio input/output.
+
+**ISP interface**: for bringing SPI port when using with Mega series products.
+
+***Pins usage on Arduino***
+
+**Pins used for Play Control:**
+
+D3 - Receiving signal from button for Volume Up.
+
+D4 - Receiving signal from switch for Next Song function.
+
+D5 - Receiving signal from switch for Play&Stop and Record function.
+
+D6 - Receiving signal from switch for Previous Song function.
+
+D7 - Receiving signal from button for Volume Down.
+
+D8 - Green Led instructions.
+
+**Pins Used for SPI Interface:**
+
+D10 - SPI Chip Select
+
+D11 - SPI MOSI
+
+D12 - SPI MISO
+
+D13 - SPI SCK
+
+**Pins Used for VS1053 Interface:**
+
+A0 - Reset of VS1053
+
+A1 - Data Require of VS1053
+
+A2 - Data Select of VS1053
+
+A3 - Chip Select of VS1053
+
+Getting Started
+---------------
+
+
+
+:::note
+
If you want to use MIDI function, you need to change the hardware installation.
+
If you changed the hardware installation in order to use MIDI function, you are not able to use playback & recording functions until you restore it to the original condition.
+:::
+
+### **Play music**
+
+1. Make sure there are songs in the micro SD card.
+2. Download [Music shield V2.0 library](https://github.com/Seeed-Studio/Music_Shield)
+3. Unzip and copy the folder to Arduino’s library path: ..\arduino-1.0\libraries.
+
+:::note
+
+1. Change the folder name of the extracted library if Arduino throws an error while loading.
+2. Change the included header (to Arduino.h) in the example file if there is a `arduino.h: No such file or directory` error while compiling.
+:::
+
+**Demo 1: Play songs (e.g. in shuffle mode)**
+
+In order to use the playback function, you need to create a playlist first.
+
+1. Restart the Arduino IDE. Open “creatList” example via the path: File --> Examples --> MusicPlayer --> creatList as below.
+
+
+
+2. Set the play mode. In “creatList”, the function we use is described as follows.
+
+ **Name:** setPlayMode(unsigned char playmode);
+
+ **Function:** Set the play mode. There are four modes you can set: MODE_NORMAL, MODE_SHUFFLE, MODE_REPEAT_LIST, MODE_REPEAT_ONE. Each mode stands for different playing orders.
+
+
+
+3. Select the type of Arduino board that you are using by the path: Tools --> Board --> for example Arduino UNO.
+4. Select the correct serial port you are using by the path: Tools --> Serial Port --> for example COM3.
+5. Upload the code. Click to Serial Monitor when “Done uploading” appears, you will find the order of songs is randomized on the list.
+
+
+
+When multifunction button is pressed up or down, the volume will change. Of course, you can try others play modes.
+
+**Demo 2: Play selected songs**
+
+1. This demo will show you how to play part of the songs from all songs in the SD card. Open the “addToList” example via the path: File --> Examples --> MusicPlayer --> addToList.
+
+
+
+2. Select songs from the playlist.You just need to list songs you want to play by name correctly in the function addToPlayList(char *songName) .
+But you must ensure that the song has been stored in the SD card and the format of those songs must be one of MP3,WMA,WAV,AAC,MIDI,Ogg Vorbis.
+
+3. Upload code. When you complete the upload,new add songs will be played.
+
+**Demo 3: Control Volume by analog port**
+
+1. Plug the Grove-Base Shield onto the Music shield, Connect the Grove socket of the Rotary and analog port 4 of the Base Shield with a Grove cable. You can change to the digital port as well. But don't forget to change the port number in the definition of the demo code at the same time.
+
+
+
+2. Open the “analogInputControl” example and upload it onto your Arduino Board.
+
+3. Rotate the knob to change music volume.
+
+**Demo 4: Record music:(Only support ATmega1280 and ATmega2560 based board)**
+
+1. Upload any sketch in Music Shield library, for example the sketch "creatList". Open the Serial Monitor and it will play audio files on SD card.
+2. Press down the multifunction button for 5 seconds, then the indicator LED will light off.
+3. Press down the multifunction button for 5 seconds again, then the music shield will begin to record, the green indicator LED will blink.
+4. Quickly press down the multifunction button again, it will stop recording.
+5. Record will be played in the last place.
+
+**Demo 5: Using MIDI**
+
+1. This demo will show you how to play notes from 3.5mm using MIDI.Open the "MidiDemoPlayer" example via the path: File --> Examples --> MusicPlayer --> MidiDemoPlayer.
+
+
+
+2. Upload Code to your arduino UNO.
+
+Reference
+---------
+
+**MIDI number to note reference list**
+
+
+
+## Schematic Online Viewer
+
+
+
+
+Resources
+---------
+
+- [Music Shield V2.2 Eagle Files](https://files.seeedstudio.com/wiki/Music_Shield_V2.2/res/Music_Shield_v2.2.zip)
+- [Music Shield V2.2 Schematic.pdf](https://files.seeedstudio.com/wiki/Music_Shield_V2.2/res/Music_Shield_v2.2_pdf.pdf)
+- [VS1053 Datasheet](https://files.seeedstudio.com/wiki/Music_Shield_V2.2/res/VS1053.pdf)
+- [Music Shield libraries](https://github.com/Seeed-Studio/Music_Shield)
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-NFC (Near Field Communication) is a technology that is widely used. Some of NFC's applications include wireless access control systems (e.g. keyless doors, and locks), and mobile device payments (e.g. store registers that receive payment information via a phone application).
-
-The NFC Shield features a transceiver module, PN532, which handles wireless communication at 13.56MHz, this means that you can read and write a 13.56MHz tag with this shield or implement point to point (P2P) data exchange between the shield and a smart phone.
-
-For this new version of the shield we have created a separate, independent, PCB antenna area which allows you to more easily stretch the NFC interface outside of your main circuit enclosure.
-
-
-
-Application Ideas
------------------
-
-If you want to make some awesome projects by NFC Shield V2.0, here are some projects for reference.
-
-### NFC Shield Demo
-
-***Paper Man, an interesting object to interact with Android***
-
-
-
-[Make it NOW!](https://www.seeedstudio.com/recipe/40-paper-man-an-interesting-object-to-interact-with-android.html)
-
-[***More Awesome Projects by NFC Shield V2.0***](https://www.seeedstudio.com/recipe/index.php?query=NFC+Shield)
-
-Features
---------
-
-- Use of the ICSP header for SPI. This means that the shield works with the following Arduino development boards: Uno, Mega, Leonardo
-- Wireless NFC communication at 13.56MHz
-- SPI protocol - pin saving interface that requires only 4 pins
-- Input Voltage: 5V from the Arduino's 5V pin
-- Typical Current: 100mA
-- 5cm max effective range
-- Supports P2P communication
-- Support ISO14443 Type A and Type B protocols
-
-Hardware Overview
------------------
-
-The NFC shield's pins and other terminals are described below.
-
-
-
-**NFC shield interface**
-
-- D10 and D9 are used for SPI chip select (CS/SS). D10 is connected by default, to connect D9 soldering the SS pad to the D9 pad and scraping off the connection between SS and D10 is required.
-- D2 can be used to receive the shield's interrupt request (IRQ) pin signal. The interrupt is not connect by default, soldering of the "D2/INT0" and "IRQ" pads is required.
-- The shield gets its SPI interface (SPI MOSI, MISO, and SCK pins) from the Arduino's ICSP header directly, this means that the shield works the following Arduinos: Uno, Mega, and Leonardo.
-- The ANT1 terminal is where the NFC antenna (included with the shield) is connected to.
-- The shield is powered by 5V from the Arduino board.
-
-The NFC shield's antenna, included with the shield, is a separate PCB module that is attached to the shield via a cable. The antenna is the area used to receive and transmit information.
-
-
-
-**NFC antenna PCB attachment**
-
-NFC Shield Setup
-----------------
-
-### Hardware Installation
-
-1. Attach the NFC Antenna to the shield.
-2. Stack the NFC Shield on your Arduino development board and connect the board to a PC using a USB cable.
-
-### Software Libraries Installation
-
-- **Step 1.** Download [Seeed Arduino NFC Library](https://github.com/Seeed-Studio/Seeed_Arduino_NFC).
-
-- **Step 2.** Refer to [How to install library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library) to install **Seeed Arduino NFC** library for Arduino.
-
-- **Step 3.** Open “WriteTag” code via the path: **File --> Examples --> WriteTag**.
-
-- **Step 4.** Modify the code as below to enable SPI communication.
-
-```cpp
-#if 0
- #include
- #include
-
-
- PN532_SPI pn532spi(SPI, 10);
- NfcAdapter nfc = NfcAdapter(pn532spi);
-#else
-
- #include
- #include
-
-
- PN532_I2C pn532_i2c(Wire);
- NfcAdapter nfc = NfcAdapter(pn532_i2c);
-#endif
-
-void setup() {
- SERIAL.begin(9600);
- SERIAL.println("NDEF Writer");
- nfc.begin();
-}
-```
-
-**Arduino available libraries menu**
-
-NFC Shield Examples/Applications
---------------------------------
-
-### Example: NFC WriteTag
-
-This example will show you how to use the NFC shield to scan an NFC tag and display its information/data.
-
-In the Arduino IDE copy, paste, then upload the code below to your board.
-
-#### Code
-
-```cpp
-#include
-#include
-#if 0
- #include
- #include
-
-
- PN532_SPI pn532spi(SPI, 10);
- NfcAdapter nfc = NfcAdapter(pn532spi);
-#else
-
- #include
- #include
-
-
- PN532_I2C pn532_i2c(Wire);
- NfcAdapter nfc = NfcAdapter(pn532_i2c);
-#endif
-
-void setup() {
- SERIAL.begin(9600);
- SERIAL.println("NDEF Writer");
- nfc.begin();
-}
-
-void loop() {
- SERIAL.println("\nPlace a formatted Mifare Classic or Ultralight NFC tag on the reader.");
- if (nfc.tagPresent()) {
- NdefMessage message = NdefMessage();
- message.addUriRecord("http://arduino.cc");
-
- bool success = nfc.write(message);
- if (success) {
- SERIAL.println("Success. Try reading this tag with your phone.");
- } else {
- SERIAL.println("Write failed.");
- }
- }
- delay(5000);
-}
-```
-
-To test the code:
-
-1. Open the Arduino Serial monitor window
-2. Set the baudrate to 115200
-3. Hold an NFC tag over the NFC antenna area
-4. The NFC shield will scan the tag and you should be able to see the NFC tag’s UID, tag type, and message (if available) in the serial monitor window. See the figure below.
-
-
-
-
-
-
-
-
-
-
-
-## FAQs
-
-**Q1: What's the length of the cable? And how long it can be if I want a longer one?**
-
-A1: The cable we sold with NFC shield is 12cm. If you want a longer one yourself, please no more than 15cm with a IPX/U.FL connector.
-
-**Q2: Can two or more antennae be added to NFC Shield V2.0 (SKU: 113030001)?**
-
-A2: NFC shield v2 is based on PN532 chip. Please note that the design only supports one antenna.
-
-## NFC Shield v2.0 Eagle File Schematic Online Viewer
-
-
-
-Resources
----------
-
-- [NFC Shield v2.0 Schematic](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_Schematic.pdf)
-- [NFC Shield v2.0 Eagle File](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_V2.0b_Eagle_files.zip)
-- [NFC Shield v2.1 Schematic](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_v2.1.pdf)
-- [NFC Shield v2.1 Eagle File](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_v2.1_Eagle_File.zip)
-- [PN532 Datasheet](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/PN532.pdf)
-- [FAQ of NFC Shield](http://support.seeedstudio.com/knowledgebase/articles/462025-nfc-shield-sku-sld01097p)
-- [Seeed Arduino NFC Library](https://github.com/Seeed-Studio/Seeed_Arduino_NFC)
-- [PN532 Library](https://github.com/Seeed-Studio/PN532)aaa
-
-## Project
-
-**Paper Man** An interesting way to communicate with your Android device through the NFC technology.
-
-
-
-**NFC Card Controlled Remote Car** Challenge your coordination: build your own NFC-controlled car
-
-
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+NFC (Near Field Communication) is a technology that is widely used. Some of NFC's applications include wireless access control systems (e.g. keyless doors, and locks), and mobile device payments (e.g. store registers that receive payment information via a phone application).
+
+The NFC Shield features a transceiver module, PN532, which handles wireless communication at 13.56MHz, this means that you can read and write a 13.56MHz tag with this shield or implement point to point (P2P) data exchange between the shield and a smart phone.
+
+For this new version of the shield we have created a separate, independent, PCB antenna area which allows you to more easily stretch the NFC interface outside of your main circuit enclosure.
+
+
+
+Application Ideas
+-----------------
+
+If you want to make some awesome projects by NFC Shield V2.0, here are some projects for reference.
+
+### NFC Shield Demo
+
+***Paper Man, an interesting object to interact with Android***
+
+
+
+[Make it NOW!](https://www.seeedstudio.com/recipe/40-paper-man-an-interesting-object-to-interact-with-android.html)
+
+[***More Awesome Projects by NFC Shield V2.0***](https://www.seeedstudio.com/recipe/index.php?query=NFC+Shield)
+
+Features
+--------
+
+- Use of the ICSP header for SPI. This means that the shield works with the following Arduino development boards: Uno, Mega, Leonardo
+- Wireless NFC communication at 13.56MHz
+- SPI protocol - pin saving interface that requires only 4 pins
+- Input Voltage: 5V from the Arduino's 5V pin
+- Typical Current: 100mA
+- 5cm max effective range
+- Supports P2P communication
+- Support ISO14443 Type A and Type B protocols
+
+Hardware Overview
+-----------------
+
+The NFC shield's pins and other terminals are described below.
+
+
+
+**NFC shield interface**
+
+- D10 and D9 are used for SPI chip select (CS/SS). D10 is connected by default, to connect D9 soldering the SS pad to the D9 pad and scraping off the connection between SS and D10 is required.
+- D2 can be used to receive the shield's interrupt request (IRQ) pin signal. The interrupt is not connect by default, soldering of the "D2/INT0" and "IRQ" pads is required.
+- The shield gets its SPI interface (SPI MOSI, MISO, and SCK pins) from the Arduino's ICSP header directly, this means that the shield works the following Arduinos: Uno, Mega, and Leonardo.
+- The ANT1 terminal is where the NFC antenna (included with the shield) is connected to.
+- The shield is powered by 5V from the Arduino board.
+
+The NFC shield's antenna, included with the shield, is a separate PCB module that is attached to the shield via a cable. The antenna is the area used to receive and transmit information.
+
+
+
+**NFC antenna PCB attachment**
+
+NFC Shield Setup
+----------------
+
+### Hardware Installation
+
+1. Attach the NFC Antenna to the shield.
+2. Stack the NFC Shield on your Arduino development board and connect the board to a PC using a USB cable.
+
+### Software Libraries Installation
+
+- **Step 1.** Download [Seeed Arduino NFC Library](https://github.com/Seeed-Studio/Seeed_Arduino_NFC).
+
+- **Step 2.** Refer to [How to install library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library) to install **Seeed Arduino NFC** library for Arduino.
+
+- **Step 3.** Open “WriteTag” code via the path: **File --> Examples --> WriteTag**.
+
+- **Step 4.** Modify the code as below to enable SPI communication.
+
+```cpp
+#if 0
+ #include
+ #include
+
+
+ PN532_SPI pn532spi(SPI, 10);
+ NfcAdapter nfc = NfcAdapter(pn532spi);
+#else
+
+ #include
+ #include
+
+
+ PN532_I2C pn532_i2c(Wire);
+ NfcAdapter nfc = NfcAdapter(pn532_i2c);
+#endif
+
+void setup() {
+ SERIAL.begin(9600);
+ SERIAL.println("NDEF Writer");
+ nfc.begin();
+}
+```
+
+**Arduino available libraries menu**
+
+NFC Shield Examples/Applications
+--------------------------------
+
+### Example: NFC WriteTag
+
+This example will show you how to use the NFC shield to scan an NFC tag and display its information/data.
+
+In the Arduino IDE copy, paste, then upload the code below to your board.
+
+#### Code
+
+```cpp
+#include
+#include
+#if 0
+ #include
+ #include
+
+
+ PN532_SPI pn532spi(SPI, 10);
+ NfcAdapter nfc = NfcAdapter(pn532spi);
+#else
+
+ #include
+ #include
+
+
+ PN532_I2C pn532_i2c(Wire);
+ NfcAdapter nfc = NfcAdapter(pn532_i2c);
+#endif
+
+void setup() {
+ SERIAL.begin(9600);
+ SERIAL.println("NDEF Writer");
+ nfc.begin();
+}
+
+void loop() {
+ SERIAL.println("\nPlace a formatted Mifare Classic or Ultralight NFC tag on the reader.");
+ if (nfc.tagPresent()) {
+ NdefMessage message = NdefMessage();
+ message.addUriRecord("http://arduino.cc");
+
+ bool success = nfc.write(message);
+ if (success) {
+ SERIAL.println("Success. Try reading this tag with your phone.");
+ } else {
+ SERIAL.println("Write failed.");
+ }
+ }
+ delay(5000);
+}
+```
+
+To test the code:
+
+1. Open the Arduino Serial monitor window
+2. Set the baudrate to 115200
+3. Hold an NFC tag over the NFC antenna area
+4. The NFC shield will scan the tag and you should be able to see the NFC tag’s UID, tag type, and message (if available) in the serial monitor window. See the figure below.
+
+
+
+
+
+
+
+
+
+
+
+## FAQs
+
+**Q1: What's the length of the cable? And how long it can be if I want a longer one?**
+
+A1: The cable we sold with NFC shield is 12cm. If you want a longer one yourself, please no more than 15cm with a IPX/U.FL connector.
+
+**Q2: Can two or more antennae be added to NFC Shield V2.0 (SKU: 113030001)?**
+
+A2: NFC shield v2 is based on PN532 chip. Please note that the design only supports one antenna.
+
+## NFC Shield v2.0 Eagle File Schematic Online Viewer
+
+
+
+Resources
+---------
+
+- [NFC Shield v2.0 Schematic](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_Schematic.pdf)
+- [NFC Shield v2.0 Eagle File](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_V2.0b_Eagle_files.zip)
+- [NFC Shield v2.1 Schematic](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_v2.1.pdf)
+- [NFC Shield v2.1 Eagle File](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/NFC_Shield_v2.1_Eagle_File.zip)
+- [PN532 Datasheet](https://files.seeedstudio.com/wiki/NFC_Shield_V2.0/res/PN532.pdf)
+- [FAQ of NFC Shield](http://support.seeedstudio.com/knowledgebase/articles/462025-nfc-shield-sku-sld01097p)
+- [Seeed Arduino NFC Library](https://github.com/Seeed-Studio/Seeed_Arduino_NFC)
+- [PN532 Library](https://github.com/Seeed-Studio/PN532)aaa
+
+## Project
+
+**Paper Man** An interesting way to communicate with your Android device through the NFC technology.
+
+
+
+**NFC Card Controlled Remote Car** Challenge your coordination: build your own NFC-controlled car
+
+
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-Build your own Arduino shield using the compact and flexible Proto Shield kit. Solder together a limitless range of circuits and reuse it in all your Arduino projects. A standard 0.1" prototyping grid accepts commonly used through-hole parts and chips. Basic components (resistors, potentiometer, LEDs, switches) are included to help you get started with your custom shield.
-
-
-
-## Features
----
-* Arduino compatible
-
-* Large 0.1 inch pitch prototyping area
-
-* A variety of through-hole sizes to fit most parts
-
-* Arduino UART and I2C port pin breakouts for easy external communication interfacing
-
-* Dual ISP breakouts for easy programming and stacking
-
-* 3.3 volt, 5 volt, and ground power rails are easily available anywhere on the board
-
-* Breadboard style prototyping area
-
-* USB type B connector
-
-* Basic components included (buttons, switches, LEDs, resistors, USB jack)
-
-
-## Components included in the kit
----
-* 1 Arduino compatible Proto Board
-
-* 1 B type USB connector
-
-* 1 40-pin 2.54mm male long header
-
-* 1 40-pin 2.54mm female header
-
-* 2 40-pin 2.54mm male headers
-
-* 1 40-pin 2.54mm spacer
-
-* 3 8-pin 2.54mm female headers
-
-* 1 6-pin 2.54mm female header
-
-* 1 ISP female pin header
-
-* 1 ISP male pin header
-
-* 1 10k ohm potentiometer
-
-* 4 1k ohm resistors
-
-* 2 10k ohm resistors
-
-* 2 3mm red LEDs
-
-* 2 3mm green LEDs
-
-* 1 3mm dual color LED
-
-* 4 Mini push button switches
-
-* 2 DPDT switches
-
-## Board trace schematic
----
-
-
-
-## Assembly
-
-**Step 1:** Solder the Red LED to the holes in the Power Socket outline. Be sure to match the flat side of the LED with the outline on the board. Solder the green LED to the holes in the pin13 outline on the board, again, matching the flat side of the LED to the board outline. Solder two 1K resistors to R1 and R2. Solder Reset button and ISP header per the picture below. Note: The reset button is easier to install if you insert it before inserting the ISP header.
-
-
-
-**Step 2:** Solder the female and male connectors. Note: solder ADC6 and ADC7 **ONLY** if your are using a [Seeeduino](https://www.seeedstudio.com/depot/index.php?main_page=advanced_search_result&search_in_description=0&zenid=15c0e10e2d81d5481f863ae4eaaf7ca1&keyword=seeeduino&x=0&y=0). When using an Arduino, do **NOT** solder ADC6 and ADC7.
-
-
-
-
-
-**Step 3:** Solder the USB connector to the USB port, and the potentiometer in the 80 mil holes. Solder the bottom left Power pins to suit your project.
-
-
-
-Your finished kit should look similar to the picture above.
-
-
-## Resources
----
-* [Sources file](https://files.seeedstudio.com/wiki/Protoshield_Kit_for_Arduino/res/ProtoShield.brd)
-
-## Tech Support & Product Discussion
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+Build your own Arduino shield using the compact and flexible Proto Shield kit. Solder together a limitless range of circuits and reuse it in all your Arduino projects. A standard 0.1" prototyping grid accepts commonly used through-hole parts and chips. Basic components (resistors, potentiometer, LEDs, switches) are included to help you get started with your custom shield.
+
+
+
+## Features
+---
+* Arduino compatible
+
+* Large 0.1 inch pitch prototyping area
+
+* A variety of through-hole sizes to fit most parts
+
+* Arduino UART and I2C port pin breakouts for easy external communication interfacing
+
+* Dual ISP breakouts for easy programming and stacking
+
+* 3.3 volt, 5 volt, and ground power rails are easily available anywhere on the board
+
+* Breadboard style prototyping area
+
+* USB type B connector
+
+* Basic components included (buttons, switches, LEDs, resistors, USB jack)
+
+
+## Components included in the kit
+---
+* 1 Arduino compatible Proto Board
+
+* 1 B type USB connector
+
+* 1 40-pin 2.54mm male long header
+
+* 1 40-pin 2.54mm female header
+
+* 2 40-pin 2.54mm male headers
+
+* 1 40-pin 2.54mm spacer
+
+* 3 8-pin 2.54mm female headers
+
+* 1 6-pin 2.54mm female header
+
+* 1 ISP female pin header
+
+* 1 ISP male pin header
+
+* 1 10k ohm potentiometer
+
+* 4 1k ohm resistors
+
+* 2 10k ohm resistors
+
+* 2 3mm red LEDs
+
+* 2 3mm green LEDs
+
+* 1 3mm dual color LED
+
+* 4 Mini push button switches
+
+* 2 DPDT switches
+
+## Board trace schematic
+---
+
+
+
+## Assembly
+
+**Step 1:** Solder the Red LED to the holes in the Power Socket outline. Be sure to match the flat side of the LED with the outline on the board. Solder the green LED to the holes in the pin13 outline on the board, again, matching the flat side of the LED to the board outline. Solder two 1K resistors to R1 and R2. Solder Reset button and ISP header per the picture below. Note: The reset button is easier to install if you insert it before inserting the ISP header.
+
+
+
+**Step 2:** Solder the female and male connectors. Note: solder ADC6 and ADC7 **ONLY** if your are using a [Seeeduino](https://www.seeedstudio.com/depot/index.php?main_page=advanced_search_result&search_in_description=0&zenid=15c0e10e2d81d5481f863ae4eaaf7ca1&keyword=seeeduino&x=0&y=0). When using an Arduino, do **NOT** solder ADC6 and ADC7.
+
+
+
+
+
+**Step 3:** Solder the USB connector to the USB port, and the potentiometer in the 80 mil holes. Solder the bottom left Power pins to suit your project.
+
+
+
+Your finished kit should look similar to the picture above.
+
+
+## Resources
+---
+* [Sources file](https://files.seeedstudio.com/wiki/Protoshield_Kit_for_Arduino/res/ProtoShield.brd)
+
+## Tech Support & Product Discussion
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
\ No newline at end of file
diff --git a/docs/Top_Brand/Arduino/shield/RGBW_Stripe_WireLess_Shield_V1.0.md b/docs/Top_Brand/Arduino/shield/RGBW_Stripe_WireLess_Shield_V1.0.md
index a3de957bbbc0e..ea3ff4cde77b8 100644
--- a/docs/Top_Brand/Arduino/shield/RGBW_Stripe_WireLess_Shield_V1.0.md
+++ b/docs/Top_Brand/Arduino/shield/RGBW_Stripe_WireLess_Shield_V1.0.md
@@ -1,126 +1,123 @@
----
-description: RGBW_Stripe_WireLess_Shield_V1.0
-title: RGBW Stripe WireLess Shield V1.0
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /RGBW_Stripe_WireLess_Shield_V1.0
-last_update:
- date: 02/02/2023
- author: Eico
-
-no_comments: false # for Disqus
-
----
-
-
-
-RGBW Stripe WireLess Shield has 4 PWM output to connect RGBW LED Strip.
-Anyone can handle a load of 1.5 A with a voltage of 5 to 24 V.
-Integrated control in 5 Arduino easily provide power from the input power supply.
-Self-renewing fuse protects LED Strip overcurrent.
-For remote control RGB tape used popular transceiver nRF24L01+.
-The most interesting is that the board has a memory, and you can now update the firmware of your Arduino through the air!
-
-
-
-
-
-
-## Feature
-
-* Built on Arduino-compatible architecture (DualOptiboot)
-
-* Compatibility with 12 - 24V RGB LED Strip
-
-* 4 PWM output (RGBW)
-
-* On board 64kb SPI flash / E2prom (for OTA firmware updates)
-
-* Built-in Auto LED RF activity (for nRF24L01 +)
-
-* Mini transceiver 2.4G nRF24L01 +
-
-* Self-renewing fuse
-
-* Built-in button
-
-* GROVE-compatible connector: I2C
-
-## Layout and schematics
-
-
-
-
-
-
-
-## Libraries
-
-### Necessary libraries
-
-### Demo code (example)
-
-```cpp
-
-int L_RED = 6;
-int L_GREEN = 9;
-int L_BLUE = 3;
-int L_WHITE = 5;
-
-int brightness = 0;
-int fadeAmount = 5;
-
-void setup() {
- pinMode(L_RED, OUTPUT);
- pinMode(L_GREEN, OUTPUT);
- pinMode(L_BLUE, OUTPUT);
- pinMode(L_WHITE, OUTPUT);
-}
-
-void loop() {
- // RED
- analogWrite(L_RED, brightness);
- brightness = brightness + fadeAmount;
- if (brightness == 0 || brightness == 255) {
- fadeAmount = -fadeAmount ;
- }
- // GREEN
- analogWrite(L_GREEN, brightness);
- brightness = brightness + fadeAmount;
- if (brightness == 0 || brightness == 255) {
- fadeAmount = -fadeAmount ;
- }
- // BLUE
- analogWrite(L_BLUE, brightness);
- brightness = brightness + fadeAmount;
- if (brightness == 0 || brightness == 255) {
- fadeAmount = -fadeAmount ;
- }
- // WHITE
- analogWrite(L_WHITE, brightness);
- brightness = brightness + fadeAmount;
- if (brightness == 0 || brightness == 255) {
- fadeAmount = -fadeAmount ;
- }
-}
-```
-
-## Version Tracker
-
-| Revision | Description | Release |
-|----------|-------------|---------|
-| 1.0 rev 1 | Public version | 19.11.2015 |
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+RGBW Stripe WireLess Shield has 4 PWM output to connect RGBW LED Strip.
+Anyone can handle a load of 1.5 A with a voltage of 5 to 24 V.
+Integrated control in 5 Arduino easily provide power from the input power supply.
+Self-renewing fuse protects LED Strip overcurrent.
+For remote control RGB tape used popular transceiver nRF24L01+.
+The most interesting is that the board has a memory, and you can now update the firmware of your Arduino through the air!
+
+
+
+
+
+
+## Feature
+
+* Built on Arduino-compatible architecture (DualOptiboot)
+
+* Compatibility with 12 - 24V RGB LED Strip
+
+* 4 PWM output (RGBW)
+
+* On board 64kb SPI flash / E2prom (for OTA firmware updates)
+
+* Built-in Auto LED RF activity (for nRF24L01 +)
+
+* Mini transceiver 2.4G nRF24L01 +
+
+* Self-renewing fuse
+
+* Built-in button
+
+* GROVE-compatible connector: I2C
+
+## Layout and schematics
+
+
+
+
+
+
+
+## Libraries
+
+### Necessary libraries
+
+### Demo code (example)
+
+```cpp
+
+int L_RED = 6;
+int L_GREEN = 9;
+int L_BLUE = 3;
+int L_WHITE = 5;
+
+int brightness = 0;
+int fadeAmount = 5;
+
+void setup() {
+ pinMode(L_RED, OUTPUT);
+ pinMode(L_GREEN, OUTPUT);
+ pinMode(L_BLUE, OUTPUT);
+ pinMode(L_WHITE, OUTPUT);
+}
+
+void loop() {
+ // RED
+ analogWrite(L_RED, brightness);
+ brightness = brightness + fadeAmount;
+ if (brightness == 0 || brightness == 255) {
+ fadeAmount = -fadeAmount ;
+ }
+ // GREEN
+ analogWrite(L_GREEN, brightness);
+ brightness = brightness + fadeAmount;
+ if (brightness == 0 || brightness == 255) {
+ fadeAmount = -fadeAmount ;
+ }
+ // BLUE
+ analogWrite(L_BLUE, brightness);
+ brightness = brightness + fadeAmount;
+ if (brightness == 0 || brightness == 255) {
+ fadeAmount = -fadeAmount ;
+ }
+ // WHITE
+ analogWrite(L_WHITE, brightness);
+ brightness = brightness + fadeAmount;
+ if (brightness == 0 || brightness == 255) {
+ fadeAmount = -fadeAmount ;
+ }
+}
+```
+
+## Version Tracker
+
+| Revision | Description | Release |
+|----------|-------------|---------|
+| 1.0 rev 1 | Public version | 19.11.2015 |
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-RS232 Shield is a standard communication port for industry equipment.This module is base on MAX232,which is a dual driver/receiver that includes a capacitive voltage generator to supply TIA/EIA-232-F voltage levels from a single 5-V supply. The shield integrates DB9 connectors (female) that provide connection to various devices with RS232 interface. Also the RS232 headers will facilitate your connections and commissioning. It provides the welding areas to make full use of extra space on it, which is highly convenient for prototyping.
-
-
-
-## Specifications
--------------
-
-- Meets or Exceeds TIA/EIA-232-F and ITU
-- Operates Up To 120 kbit/s
-- Low Supply Current
-- LED Indicator
-- DB9 Connectors(female)
-- Welding Areas
-
-
-## Interface Function
-------------------
-
-**Usage**
-
-First,we can test it by computer.
-
-### Hardware Installation
-
-1. Seeeduino v3.0,Mini usb Cable,RS232 Shield,RS232 to USB Cable.
-2. Make the connections as below. The jumper hats can be used to select the software serial port from the digital pins. You can set them to D7(232_TX) and D6(232_RX), and modify the code to "*SoftwareSerial mySerial(7, 6); // 232_TX, 232_RX*"
-
-
-
-### Software Part
-
-- 1) Open Arduino IDE, and paste the code below.
-
-```cpp
-
-#include
-
-SoftwareSerial mySerial(7, 6); //232_TX,232_RX
-
-void setup()
-{
- // Open serial communications and wait for port to open:
- Serial.begin(9600);
- while (!Serial) {
- ; // wait for serial port to connect. Needed for Leonardo only
- }
-
-
- Serial.println("Goodnight moon!");
-
- // set the data rate for the SoftwareSerial port
- mySerial.begin(9600);
- mySerial.println("Hello, world?");
-}
-
-void loop() // run over and over
-{
- if (mySerial.available())
- Serial.write(mySerial.read());
- if (Serial.available())
- mySerial.write(Serial.read());
-}
-```
-
-- 2) Upload the code. Note that you should select the correct board type and COM port.
-- 3) Open the Serial Monitor.
-
-You can see :
-
-
-
-
- ## Schematic Online Viewer
-
-
-
-
-
-
-Resources
---------
-
-- [RS232 Shield eagle file](https://files.seeedstudio.com/wiki/RS232_Shield/res/RS232_Shield_v1.0_Eagle.zip)
-- [RS232_Shield_v1.0.pdf](https://files.seeedstudio.com/wiki/RS232_Shield/res/RS232_Shield_v1.pdf)
-- [Datasheet MAX232D.pdf](https://files.seeedstudio.com/wiki/RS232_Shield/res/MAX232D.pdf)
-
-
-
-
-## Tech Support & Product Discussion
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+RS232 Shield is a standard communication port for industry equipment.This module is base on MAX232,which is a dual driver/receiver that includes a capacitive voltage generator to supply TIA/EIA-232-F voltage levels from a single 5-V supply. The shield integrates DB9 connectors (female) that provide connection to various devices with RS232 interface. Also the RS232 headers will facilitate your connections and commissioning. It provides the welding areas to make full use of extra space on it, which is highly convenient for prototyping.
+
+
+
+## Specifications
+-------------
+
+- Meets or Exceeds TIA/EIA-232-F and ITU
+- Operates Up To 120 kbit/s
+- Low Supply Current
+- LED Indicator
+- DB9 Connectors(female)
+- Welding Areas
+
+
+## Interface Function
+------------------
+
+**Usage**
+
+First,we can test it by computer.
+
+### Hardware Installation
+
+1. Seeeduino v3.0,Mini usb Cable,RS232 Shield,RS232 to USB Cable.
+2. Make the connections as below. The jumper hats can be used to select the software serial port from the digital pins. You can set them to D7(232_TX) and D6(232_RX), and modify the code to "*SoftwareSerial mySerial(7, 6); // 232_TX, 232_RX*"
+
+
+
+### Software Part
+
+- 1) Open Arduino IDE, and paste the code below.
+
+```cpp
+
+#include
+
+SoftwareSerial mySerial(7, 6); //232_TX,232_RX
+
+void setup()
+{
+ // Open serial communications and wait for port to open:
+ Serial.begin(9600);
+ while (!Serial) {
+ ; // wait for serial port to connect. Needed for Leonardo only
+ }
+
+
+ Serial.println("Goodnight moon!");
+
+ // set the data rate for the SoftwareSerial port
+ mySerial.begin(9600);
+ mySerial.println("Hello, world?");
+}
+
+void loop() // run over and over
+{
+ if (mySerial.available())
+ Serial.write(mySerial.read());
+ if (Serial.available())
+ mySerial.write(Serial.read());
+}
+```
+
+- 2) Upload the code. Note that you should select the correct board type and COM port.
+- 3) Open the Serial Monitor.
+
+You can see :
+
+
+
+
+ ## Schematic Online Viewer
+
+
+
+
+
+
+Resources
+--------
+
+- [RS232 Shield eagle file](https://files.seeedstudio.com/wiki/RS232_Shield/res/RS232_Shield_v1.0_Eagle.zip)
+- [RS232_Shield_v1.0.pdf](https://files.seeedstudio.com/wiki/RS232_Shield/res/RS232_Shield_v1.pdf)
+- [Datasheet MAX232D.pdf](https://files.seeedstudio.com/wiki/RS232_Shield/res/MAX232D.pdf)
+
+
+
+
+## Tech Support & Product Discussion
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
\ No newline at end of file
diff --git a/docs/Top_Brand/Arduino/shield/Relay_Shield_v3.md b/docs/Top_Brand/Arduino/shield/Relay_Shield_v3.md
index 317cdafa759d4..a5753b44721ac 100644
--- a/docs/Top_Brand/Arduino/shield/Relay_Shield_v3.md
+++ b/docs/Top_Brand/Arduino/shield/Relay_Shield_v3.md
@@ -1,278 +1,275 @@
----
-description: Relay_Shield_v3
-title: Relay Shield v3
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Relay_Shield_v3
-sku: 103030009
-last_update:
- date: 01/11/2023
- author: Eico
-
-no_comments: false # for Disqus
-
----
-
-
-
-The Relay Shield provides a solution for controlling high current devices that cannot be controlled by Arduino’s Digital I/O pins due to current and voltage limits.
-
-The Relay Shield features four high quality relays and provides NO/NC interfaces, four dynamic LED indicators to show the on/off state of each relay, and the standardized shield form factor to provide a smooth connection to the Arduino/Seeeduino board or other Arduino compatible boards.
-
-
-
-## Features
-
----
-
-- Arudino Uno/Leonardo/Seeeduino compatible; Other board or microcontroller via jumper cables
-- Interface via digital I/O pins 4,5,6, and 7
-- Relay screw terminals
-- Standardized shield shape and design
-- LED working status indicators for each relay
-- High quality relays
-- COM, NO (Normally Open), and NC (Normally Closed) relay pins for each relay
-- Update pin SCL, SDA, IOREF, NC.
-
-## Specification
-
-
-
-
-
Item
-
Min
-
Typical
-
Max
-
Unit
-
-
-
Supply Voltage
-
4.75
-
5
-
5.25
-
VDC
-
-
-
Working Current
-
8
-
-
-
250
-
mA
-
-
-
Switching Voltage
-
-
-
-
-
30
-
VDC
-
-
-
Switching Current
-
-
-
-
-
8
-
A
-
-
-
Frequency
-
-
-
1
-
-
-
HZ
-
-
-
Switching Power
-
-
-
-
-
70
-
W
-
-
-
Relay Life
-
100000
-
-
-
-
-
Cycle
-
-
-
ESD contact discharge
-
-
-
±4
-
-
-
KV
-
-
-
ESD air discharge
-
-
-
±8
-
-
-
KV
-
-
-
Dimension
-
-
-
68.7X53.5X30.8
-
-
-
mm
-
-
-
Net Weight
-
-
-
55±2
-
-
-
g
-
-
-
-:::caution
-
-1. Please place 2 layers of electrical tape on the top of the Arduino's usb connector. This will prevent the relay shield from making contact.
-2. Do not operate voltage more than 35V DC.
-:::
-
-## Shield Interface Description
-
----
-
-
-
-- Digital 4 – controls RELAY4’s COM4 pin (located in J4)
-- Digital 5 – controls RELAY3’s COM3 pin (located in J3)
-- Digital 6 – controls RELAY2’s COM2 pin (located in J2)
-- Digital 7 – controls RELAY1’s COM1 pin (located in J1)
-
-**J1 Interface/Terminal Pin Description:**
-
-- **COM1 (Common Pin)** : The relay pin controlled from the digital pin.
-
-- **NC1 (Normally Closed)**: This terminal will be connected to COM1 when the RELAY1 control pin (Digital 7 I/O pin) is set low and disconnected when the RELAY1 control pin is set high.
-
-- **NO1 (Normally Open)**: This terminal will be connected to COM1 when the RELAY1 control pin (Digital 7 I/O pin) is set high and disconnected when the RELAY1 control pin is set low.
-
-**Terminals J2-4 are similar to J1 except that they control RELAY2-RELAY4 respectively.**
-
-:::note
-Only four Arduino Digital I/O pins, pins 4-7, are required to control the four different relays. Additionally the 5V and two GND Arduino pins are also required to power up the Relay Shield.
-:::
-
-## Relays Operation/Tutorial
-
----
-Relays are basically electromagnetic switches: when the relay is energized by the control circuit (i.e. when a voltage and current is applied to the coil), the current and coil create a magnetic field which is able to attract the COM terminal towards the NO terminal, when the control circuit removes the applied voltage and current the COM terminal returns to contact the NC terminal due to a mechanical force (usually a spring).
-
-Some practical relay applications include: control of high voltage using low voltage, motor control, remote control, anti-hearing alarm, automatic temperature alarm, incubators and son on.
-
-A motor control application with one relay and one motor is shown below:
-
-
-
-
-
-In the case of the Relay Shield, the two “Control Circuit” terminals for each of the four relays are controlled by only one Arduino Digital I/O pin. Pins 4, 5, 6, and 7 control relays 4, 3, 2, and 1 respectively.
-
-## Relay Shield Example(s)/Usage
-
-Now that you know how a relay works internally, let us show you how to use the Relay Shield.
-
-**Example #1: DC Motor Control**
-
-1.Stack the Relay Shield onto the Arduino development board.
-
-2.Connect Arduino to your PC using a USB cable.
-
-3.We will use RELAY3 to control the DC motor. Connect the DC motor and Relay Shield as shown in the schematic and figure below:
-
-
-
-
-
-:::note
-The external power supply in the figure above can be a battery or power supply. The external supply must be able to provide enough current and be set to the correct voltage for the motor. In our testing, we used a lithium battery as the external power supply for the motor.
-:::
-
-4.Start the Arduino IDE and upload the following code to the Arduino board:
-
-```cpp
-int MotorControl = 5; // Digital Arduino Pin used to control the motor
-
-// the setup routine runs once when you press reset:
-void setup() {
- // declare pin 5 to be an output:
- pinMode(MotorControl, OUTPUT);
-}
-
-// the loop routine runs over and over again forever:
-void loop() {
- digitalWrite(MotorControl,HIGH);// NO3 and COM3 Connected (the motor is running)
- delay(1000); // wait 1000 milliseconds (1 second)
- digitalWrite(MotorControl,LOW);// NO3 and COM3 Disconnected (the motor is not running)
- delay(1000); // wait 1000 milliseconds (1 second)
-}
-```
-
-When you have uploaded the code to your Arduino/Seeeduino board the motor should run one second, stop for another second and repeat the process indefinitely. When the motor is running (NO3 and COM3 are connected), the NO3 LED indicator will be lit.
-
-**Example #2: How to Use More Than One Relay Shield With Only One Arduino/Seeeduino Board**
-
-Because the Relay Shield uses digital pins on the Arduino to control each the relays, more than one Relay Shield can be used with the same Arduino board, to do so simply follow these steps:
-
-1.Stack one of the Relay Shields (let’s call this one Relay Shield #1) onto the Arduino development board
-
-2.Connect another Relay Shield (let’s call this one Relay Shield #2) using jumper cables/wires to Relay Shield #1 as shown in the figure below:
-
-
-
-- Relay Shield #1 GND pin is connected to Relay Shield #2 GND pin
-- Relay Shield #1 5V pin is connected to Relay Shield #2 5V pin
-- Relay Shield #1 Digital Pins 8, 9, 10, and 11, are connected to Relay Shield #2 Digital Pins 7, 6, 5, and 4 respectively.
-
-3.Now you can control relays 1, 2, 3, and 4 in Relay Shield #2 using the Arduino’s 8, 9, 10, and 11 digital I/O pins. See sample code below for controlling RELAY1 in Relay Shield #2:
-
-```cpp
-int relay1inShield2 = 8; // Digital Arduino Pin 8 is used to control relay 1 in Relay Shield #2
-
-// the setup routine runs once when you press reset:
-void setup() {
- // declare pin 8 to be an output:
- pinMode(relay1inShield2, OUTPUT);
-}
-
-// the loop routine runs over and over again forever:
-void loop() {
- digitalWrite(relay1inShield2,HIGH); // relay is energized (NO is connected to COM)
- delay(1000); // wait 1000 milliseconds (1 second)
- digitalWrite(relay1inShield2,LOW); // NO is disconnected from COM
- delay(1000); // wait 1000 milliseconds (1 second)
-}
-```
-
-## Related Reading
-
----
-
-- [FAQ of Relay Shield](http://support.seeedstudio.com/knowledgebase/articles/462030-relay-shield-sku-sld01101p)
-
-## Schematic Online Viewer
-
-
-
-
-## Resource
-
----
-
-- [Relay Shield v3.0](https://files.seeedstudio.com/wiki/Relay_Shield_v3.0/res/Relay_Shield_v3.0.zip)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+The Relay Shield provides a solution for controlling high current devices that cannot be controlled by Arduino’s Digital I/O pins due to current and voltage limits.
+
+The Relay Shield features four high quality relays and provides NO/NC interfaces, four dynamic LED indicators to show the on/off state of each relay, and the standardized shield form factor to provide a smooth connection to the Arduino/Seeeduino board or other Arduino compatible boards.
+
+
+
+## Features
+
+---
+
+- Arudino Uno/Leonardo/Seeeduino compatible; Other board or microcontroller via jumper cables
+- Interface via digital I/O pins 4,5,6, and 7
+- Relay screw terminals
+- Standardized shield shape and design
+- LED working status indicators for each relay
+- High quality relays
+- COM, NO (Normally Open), and NC (Normally Closed) relay pins for each relay
+- Update pin SCL, SDA, IOREF, NC.
+
+## Specification
+
+
+
+
+
Item
+
Min
+
Typical
+
Max
+
Unit
+
+
+
Supply Voltage
+
4.75
+
5
+
5.25
+
VDC
+
+
+
Working Current
+
8
+
-
+
250
+
mA
+
+
+
Switching Voltage
+
-
+
-
+
30
+
VDC
+
+
+
Switching Current
+
-
+
-
+
8
+
A
+
+
+
Frequency
+
-
+
1
+
-
+
HZ
+
+
+
Switching Power
+
-
+
-
+
70
+
W
+
+
+
Relay Life
+
100000
+
-
+
-
+
Cycle
+
+
+
ESD contact discharge
+
-
+
±4
+
-
+
KV
+
+
+
ESD air discharge
+
-
+
±8
+
-
+
KV
+
+
+
Dimension
+
-
+
68.7X53.5X30.8
+
-
+
mm
+
+
+
Net Weight
+
-
+
55±2
+
-
+
g
+
+
+
+:::caution
+
+1. Please place 2 layers of electrical tape on the top of the Arduino's usb connector. This will prevent the relay shield from making contact.
+2. Do not operate voltage more than 35V DC.
+:::
+
+## Shield Interface Description
+
+---
+
+
+
+- Digital 4 – controls RELAY4’s COM4 pin (located in J4)
+- Digital 5 – controls RELAY3’s COM3 pin (located in J3)
+- Digital 6 – controls RELAY2’s COM2 pin (located in J2)
+- Digital 7 – controls RELAY1’s COM1 pin (located in J1)
+
+**J1 Interface/Terminal Pin Description:**
+
+- **COM1 (Common Pin)** : The relay pin controlled from the digital pin.
+
+- **NC1 (Normally Closed)**: This terminal will be connected to COM1 when the RELAY1 control pin (Digital 7 I/O pin) is set low and disconnected when the RELAY1 control pin is set high.
+
+- **NO1 (Normally Open)**: This terminal will be connected to COM1 when the RELAY1 control pin (Digital 7 I/O pin) is set high and disconnected when the RELAY1 control pin is set low.
+
+**Terminals J2-4 are similar to J1 except that they control RELAY2-RELAY4 respectively.**
+
+:::note
+Only four Arduino Digital I/O pins, pins 4-7, are required to control the four different relays. Additionally the 5V and two GND Arduino pins are also required to power up the Relay Shield.
+:::
+
+## Relays Operation/Tutorial
+
+---
+Relays are basically electromagnetic switches: when the relay is energized by the control circuit (i.e. when a voltage and current is applied to the coil), the current and coil create a magnetic field which is able to attract the COM terminal towards the NO terminal, when the control circuit removes the applied voltage and current the COM terminal returns to contact the NC terminal due to a mechanical force (usually a spring).
+
+Some practical relay applications include: control of high voltage using low voltage, motor control, remote control, anti-hearing alarm, automatic temperature alarm, incubators and son on.
+
+A motor control application with one relay and one motor is shown below:
+
+
+
+
+
+In the case of the Relay Shield, the two “Control Circuit” terminals for each of the four relays are controlled by only one Arduino Digital I/O pin. Pins 4, 5, 6, and 7 control relays 4, 3, 2, and 1 respectively.
+
+## Relay Shield Example(s)/Usage
+
+Now that you know how a relay works internally, let us show you how to use the Relay Shield.
+
+**Example #1: DC Motor Control**
+
+1.Stack the Relay Shield onto the Arduino development board.
+
+2.Connect Arduino to your PC using a USB cable.
+
+3.We will use RELAY3 to control the DC motor. Connect the DC motor and Relay Shield as shown in the schematic and figure below:
+
+
+
+
+
+:::note
+The external power supply in the figure above can be a battery or power supply. The external supply must be able to provide enough current and be set to the correct voltage for the motor. In our testing, we used a lithium battery as the external power supply for the motor.
+:::
+
+4.Start the Arduino IDE and upload the following code to the Arduino board:
+
+```cpp
+int MotorControl = 5; // Digital Arduino Pin used to control the motor
+
+// the setup routine runs once when you press reset:
+void setup() {
+ // declare pin 5 to be an output:
+ pinMode(MotorControl, OUTPUT);
+}
+
+// the loop routine runs over and over again forever:
+void loop() {
+ digitalWrite(MotorControl,HIGH);// NO3 and COM3 Connected (the motor is running)
+ delay(1000); // wait 1000 milliseconds (1 second)
+ digitalWrite(MotorControl,LOW);// NO3 and COM3 Disconnected (the motor is not running)
+ delay(1000); // wait 1000 milliseconds (1 second)
+}
+```
+
+When you have uploaded the code to your Arduino/Seeeduino board the motor should run one second, stop for another second and repeat the process indefinitely. When the motor is running (NO3 and COM3 are connected), the NO3 LED indicator will be lit.
+
+**Example #2: How to Use More Than One Relay Shield With Only One Arduino/Seeeduino Board**
+
+Because the Relay Shield uses digital pins on the Arduino to control each the relays, more than one Relay Shield can be used with the same Arduino board, to do so simply follow these steps:
+
+1.Stack one of the Relay Shields (let’s call this one Relay Shield #1) onto the Arduino development board
+
+2.Connect another Relay Shield (let’s call this one Relay Shield #2) using jumper cables/wires to Relay Shield #1 as shown in the figure below:
+
+
+
+- Relay Shield #1 GND pin is connected to Relay Shield #2 GND pin
+- Relay Shield #1 5V pin is connected to Relay Shield #2 5V pin
+- Relay Shield #1 Digital Pins 8, 9, 10, and 11, are connected to Relay Shield #2 Digital Pins 7, 6, 5, and 4 respectively.
+
+3.Now you can control relays 1, 2, 3, and 4 in Relay Shield #2 using the Arduino’s 8, 9, 10, and 11 digital I/O pins. See sample code below for controlling RELAY1 in Relay Shield #2:
+
+```cpp
+int relay1inShield2 = 8; // Digital Arduino Pin 8 is used to control relay 1 in Relay Shield #2
+
+// the setup routine runs once when you press reset:
+void setup() {
+ // declare pin 8 to be an output:
+ pinMode(relay1inShield2, OUTPUT);
+}
+
+// the loop routine runs over and over again forever:
+void loop() {
+ digitalWrite(relay1inShield2,HIGH); // relay is energized (NO is connected to COM)
+ delay(1000); // wait 1000 milliseconds (1 second)
+ digitalWrite(relay1inShield2,LOW); // NO is disconnected from COM
+ delay(1000); // wait 1000 milliseconds (1 second)
+}
+```
+
+## Related Reading
+
+---
+
+- [FAQ of Relay Shield](http://support.seeedstudio.com/knowledgebase/articles/462030-relay-shield-sku-sld01101p)
+
+## Schematic Online Viewer
+
+
+
+
+## Resource
+
+---
+
+- [Relay Shield v3.0](https://files.seeedstudio.com/wiki/Relay_Shield_v3.0/res/Relay_Shield_v3.0.zip)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-The Renbotics ServoShield is an Arduino-compatible shield that uses two 4017 decade counters to drive up to 16 servos using only 4 pins (digital pins 6 to 9) and as little as one 8bit timer (Timer 2) in standard mode or two 16/8bit timers (Timer 1 and Timer 2 for Duemilanove or Timer 3 for Mega) in high accuracy mode. It also includes a 196 point breadboard style prototyping area.
-
-
-
-## Features
-
-* 16 Servo Channels
-
-* Convenient screw terminal for servo power supply
-
-* 196 Point breadboard style prototyping area
-
-* Compatible with Arduino Duemilanove and Arduino Mega
-
-* Easy to use API
-
-## Application Ideas
-
-* Robotics
-
-* Animatronics
-
-* Mechatronic Art
-
-## Usage
-
-### Hardware Installation
-
-Accembled View:
-
-
-
-### Programming
-
-**Sample 1: Simple servo sweeper**
-
-```cpp
-#include
-ServoShield servos; //Create a ServoShield object
-void setup()
-{
- for (int servo = 0; servo < 16; servo++)//Initialize all 16 servos
- {
- servos.setbounds(servo, 1000, 2000); //Set the minimum and maximum pulse duration
- servos.setposition(servo, 1500); //Set the initial position of the servo
- }
- servos.start(); //Start the servo shield
-}
-void loop()
-{
- for(int pos = 1000; pos < 2000; pos++) //Move the servos from 0 degrees to 180 degrees
- { //in steps of 1 degree
- for (int i = 0; i < 16; i++) //for all 16 servos
- servos.setposition(i, pos); //Tell servo to go to position in variable 'pos'
- delay(1);
- }
- for(int pos = 2000; pos >= 1000; pos--)//Move the servos from 180 degrees to 0 degrees
- {
- for (int i = 0; i < 16; i++) //all 16 servos
- servos.setposition(i, pos); //Tell servo to go to position in variable 'pos'
- delay(1);
- }
-}
-```
-
-## Bill of Materials (BOM) /parts list
-
-* 2 x 4017 Decade Counter DIP16
-
-* 2 x 10nf Capacitors
-
-* 2 x 6 pin Female Shield Stacking Headers
-
-* 2 x 8 pin Female Shield Stacking Headers
-
-* 1 x 2 pin Screw Terminal
-
-* 3 x 16 pin Male Breakaway Headers
-
-## Version Tracker
-
-| Revision | Descriptions | Release |
-|----------|-------------|---------|
-| v1.1 | Initial public release | Aug 23, 2009 |
-
-## Resources
-
-* [Manual Rev 1.5](https://www.seeedstudio.com/depot/datasheet/RenboticsServoShield1.5.pdf)
-
-* [Arduino Library Rev 1.3 (Updated 07-09-2009)](https://www.seeedstudio.com/depot/images/product/ServoShield.zip)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+The Renbotics ServoShield is an Arduino-compatible shield that uses two 4017 decade counters to drive up to 16 servos using only 4 pins (digital pins 6 to 9) and as little as one 8bit timer (Timer 2) in standard mode or two 16/8bit timers (Timer 1 and Timer 2 for Duemilanove or Timer 3 for Mega) in high accuracy mode. It also includes a 196 point breadboard style prototyping area.
+
+
+
+## Features
+
+* 16 Servo Channels
+
+* Convenient screw terminal for servo power supply
+
+* 196 Point breadboard style prototyping area
+
+* Compatible with Arduino Duemilanove and Arduino Mega
+
+* Easy to use API
+
+## Application Ideas
+
+* Robotics
+
+* Animatronics
+
+* Mechatronic Art
+
+## Usage
+
+### Hardware Installation
+
+Accembled View:
+
+
+
+### Programming
+
+**Sample 1: Simple servo sweeper**
+
+```cpp
+#include
+ServoShield servos; //Create a ServoShield object
+void setup()
+{
+ for (int servo = 0; servo < 16; servo++)//Initialize all 16 servos
+ {
+ servos.setbounds(servo, 1000, 2000); //Set the minimum and maximum pulse duration
+ servos.setposition(servo, 1500); //Set the initial position of the servo
+ }
+ servos.start(); //Start the servo shield
+}
+void loop()
+{
+ for(int pos = 1000; pos < 2000; pos++) //Move the servos from 0 degrees to 180 degrees
+ { //in steps of 1 degree
+ for (int i = 0; i < 16; i++) //for all 16 servos
+ servos.setposition(i, pos); //Tell servo to go to position in variable 'pos'
+ delay(1);
+ }
+ for(int pos = 2000; pos >= 1000; pos--)//Move the servos from 180 degrees to 0 degrees
+ {
+ for (int i = 0; i < 16; i++) //all 16 servos
+ servos.setposition(i, pos); //Tell servo to go to position in variable 'pos'
+ delay(1);
+ }
+}
+```
+
+## Bill of Materials (BOM) /parts list
+
+* 2 x 4017 Decade Counter DIP16
+
+* 2 x 10nf Capacitors
+
+* 2 x 6 pin Female Shield Stacking Headers
+
+* 2 x 8 pin Female Shield Stacking Headers
+
+* 1 x 2 pin Screw Terminal
+
+* 3 x 16 pin Male Breakaway Headers
+
+## Version Tracker
+
+| Revision | Descriptions | Release |
+|----------|-------------|---------|
+| v1.1 | Initial public release | Aug 23, 2009 |
+
+## Resources
+
+* [Manual Rev 1.5](https://www.seeedstudio.com/depot/datasheet/RenboticsServoShield1.5.pdf)
+
+* [Arduino Library Rev 1.3 (Updated 07-09-2009)](https://www.seeedstudio.com/depot/images/product/ServoShield.zip)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-This is the newly released SD card V4.0 shield. It provides a storage space for your Arduino. Users can read/write SD card via Arduino’s built-in SD library. It supports SD, SDHC and Micro SD cards. It will only occupy the SPI port of your Arduino. Comparing to previous versions, it combines the standart SD slot and the Micro SD slot into a standard one, the included adaptor enables using of Micro SD cards . You can stack on other shields that work with the unused pins. Additionally, the preformed I2C and UART port facilitates your connection with Grove modules.
-
-
-
-## Application Ideas
-
------------------
-
-If you want to make some awesome projects with SD Card Shield, here are some projects for your reference.
-
-Here we introduce a project about [LinkIt ONE](https://www.seeedstudio.com/depot/LinkIt-ONE-p-2017.html) using SD Card.
-
-### Music Player with LinkIt One
-
-
-
-This project uses Grove - Water Sensor to create a simple but effective solution to watering plants.
-
-[Make it NOW!](https://www.seeedstudio.com/recipe/246-music-player-with-linkit-one.html)
-
-[***More Awesome Projects by SD Card***](https://www.seeedstudio.com/recipe/index.php?query=SD+Card)
-
-Features
---------
-
-- Standard SD card, SDHC card and TF card compatible
-- UART Grove & I2C connection compatible
-- Fully supported SD Library
-- Minimal number of SPI port
-- Truly stackable
-
-Specifications
---------------
-
-
-
-**Pins usage on Arduino (with SD card)**
-
-D4: SD_CS;
-
-D11: SD_DI;
-
-D12: SD_DO;
-
-D13: SD_CLK.
-
-:::note
-The SD card format can be FAT16 or FAT32.The size of SD card and the SDHC card more than 16GB is not supported.
-:::
-
-Usage
------
-
-The following is the installation of the SD card shield.
-
-### Hardware Installation
-
-1. Insert your SD card into the socket, Plug the SD Card Shield onto the Arduino .
-2. Connect the Arduino to PC using USB cable.
-
-:::note
-When you use a Micro SD card, please insert Micro SD card into the adopter, and then insert the Micro SD card Adopter into the socket as shown below.
-:::
-
-
-
-When you complete the hardware installation, it should look like this
-
-
-
-### Upload the program
-
-1. Restart the Arduino IDE. Open "CardInfo"example via the path: File --> Examples --> SD --> CardInfo.
-
- This example shows how use the utility libraries on which the SD library is based in order to get info about your SD card.Very useful for testing a card when
-
- You are not sure whether its working or not. There are also many other examples in this library, like “ReadWrite”. You can always try them out.
-
-
-
- There is a brief description to above code:
-
- First check if the card is working. If not, there will output some reasons that may lead to this result.
-
- In the case of the SD card normal work, it will print the SD card type.Then print the type and size of the FAT-type volume.
-
- Finally, get the files information such as name, date and size in bytes that found on the card.
-
-2. Upload the code.
-
-3. View Results. You can see the follow image after Click the serial monitor.
-
-
-
-4. If an error occurs, please recheck all the previous steps, and make sure the SD card is working. If none of that fixes the problem, try replacing the SD card.
-
-:::note
-Arduino default code returns SD size incorrectly if your SD is card more than 4G. The following code can solve this issue.
-:::
-
-```cpp
- /*
- SD card test
-
- This example shows how use the utility libraries on which the'
- SD library is based in order to get info about your SD card.
- Very useful for testing a card when you're not sure whether its working or not.
-
- The circuit:
- * SD card attached to SPI bus as follows:
- ** MOSI - pin 11 on Arduino Uno/Duemilanove/Diecimila
- ** MISO - pin 12 on Arduino Uno/Duemilanove/Diecimila
- ** CLK - pin 13 on Arduino Uno/Duemilanove/Diecimila
- ** CS - depends on your SD card shield or module.
- ** Pin 4 used here for consistency with other Arduino examples
-
-
- created 28 Mar 2011
- by Limor Fried
- modified 9 Apr 2012
- by Tom Igoe
- */
- // include the SD library:
- #include
- #include
-
- // set up variables using the SD utility library functions:
- Sd2Card card;
- SdVolume volume;
- SdFile root;
-
- // change this to match your SD shield or module;
- // Arduino Ethernet shield: pin 4
- // Adafruit SD shields and modules: pin 10
- // Sparkfun SD shield: pin 8
- const int chipSelect = 4;
-
- void setup()
- {
- // Open serial communications and wait for port to open:
- Serial.begin(9600);
- while (!Serial) {
- ; // wait for serial port to connect. Needed for Leonardo only
- }
-
-
- Serial.print("\nInitializing SD card...");
- // On the Ethernet Shield, CS is pin 4. It's set as an output by default.
- // Note that even if it's not used as the CS pin, the hardware SS pin
- // (10 on most Arduino boards, 53 on the Mega) must be left as an output
- // or the SD library functions will not work.
- pinMode(10, OUTPUT); // change this to 53 on a mega
-
-
- // we'll use the initialization code from the utility libraries
- // since we're just testing if the card is working!
- if (!card.init(SPI_HALF_SPEED, chipSelect)) {
- Serial.println("initialization failed. Things to check:");
- Serial.println("* is a card is inserted?");
- Serial.println("* Is your wiring correct?");
- Serial.println("* did you change the chipSelect pin to match your shield or module?");
- return;
- } else {
- Serial.println("Wiring is correct and a card is present.");
- }
-
- // print the type of card
- Serial.print("\nCard type: ");
- switch (card.type()) {
- case SD_CARD_TYPE_SD1:
- Serial.println("SD1");
- break;
- case SD_CARD_TYPE_SD2:
- Serial.println("SD2");
- break;
- case SD_CARD_TYPE_SDHC:
- Serial.println("SDHC");
- break;
- default:
- Serial.println("Unknown");
- }
-
- // Now we will try to open the 'volume'/'partition' - it should be FAT16 or FAT32
- if (!volume.init(card)) {
- Serial.println("Could not find FAT16/FAT32 partition.\nMake sure you've formatted the card");
- return;
- }
-
-
- // print the type and size of the first FAT-type volume
-
- uint64_t volumesize64;
- uint32_t volumesize32;
- Serial.print("\nVolume type is FAT");
- Serial.println(volume.fatType(), DEC);
- Serial.println();
-
- volumesize64 = volume.blocksPerCluster(); // clusters are collections of blocks
- volumesize64 *= volume.clusterCount(); // we'll have a lot of clusters
- volumesize64 *= 512; // SD card blocks are always 512 bytes
-
- Serial.print("Volume size (bytes): ");
- printLLNumber(volumesize64, DEC);
- Serial.println();
-
- Serial.print("Volume size (Kbytes): ");
- volumesize32 = volumesize64/1024;
- Serial.println(volumesize32);
-
- Serial.print("Volume size (Mbytes): ");
- volumesize32 /= 1024;
- Serial.println(volumesize32);
- /*uint64_t volumesize;
- Serial.print("\nVolume type is FAT");
- Serial.println(volume.fatType(), DEC);
- Serial.println();
-
- volumesize = volume.blocksPerCluster(); // clusters are collections of blocks
- volumesize *= volume.clusterCount(); // we'll have a lot of clusters
- volumesize *= 512; // SD card blocks are always 512 bytes
- Serial.print("Volume size (bytes): ");
- Serial.println(volumesize,DEC);
- Serial.print("Volume size (Kbytes): ");
- volumesize /= 1024;
- Serial.println(volumesize,DEC);
- Serial.print("Volume size (Mbytes): ");
- volumesize /= 1024;
- Serial.println(volumesize,DEC);
- */
-
- Serial.println("\nFiles found on the card (name, date and size in bytes): ");
- root.openRoot(volume);
-
- // list all files in the card with date and size
- root.ls(LS_R | LS_DATE | LS_SIZE);
- }
-
-
- void loop(void) {
-
- }
- void printLLNumber(uint64_t n, uint8_t base)
- {
- unsigned char buf[16 * sizeof(long)];
- unsigned int i = 0;
-
- if (n == 0)
- {
- Serial.print((char)'0');
- return;
- }
-
- while (n > 0)
- {
- buf[i++] = n % base;
- n /= base;
- }
-
- for (; i > 0; i--)
- Serial.print((char) (buf[i - 1] < 10 ?
- '0' + buf[i - 1] :
- 'A' + buf[i - 1] - 10));
- }
-```
-
-## SD Card Shield v4.0 Schematic Online Viewer
-
-
-
-Resources
----------
-
-- [SD Card Shield v4.0 Schematic](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/SD_Card_Shiled_v4.0.pdf)
-
-- [SD Card Shield v4.0 Eagle File.zip](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/PCBA-SD%20Card%20shield%20V4.0.zip)
-
-- [SD Card Shield v4.0a Eagle File.zip](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/SD_Card_Shield_v4.0a.zip)
-
-- [SD Card Shield v4.3 Eagle file.zip](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/SD_Card_Shield_v4.3_eagle_file.zip)
-
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+This is the newly released SD card V4.0 shield. It provides a storage space for your Arduino. Users can read/write SD card via Arduino’s built-in SD library. It supports SD, SDHC and Micro SD cards. It will only occupy the SPI port of your Arduino. Comparing to previous versions, it combines the standart SD slot and the Micro SD slot into a standard one, the included adaptor enables using of Micro SD cards . You can stack on other shields that work with the unused pins. Additionally, the preformed I2C and UART port facilitates your connection with Grove modules.
+
+
+
+## Application Ideas
+
+-----------------
+
+If you want to make some awesome projects with SD Card Shield, here are some projects for your reference.
+
+Here we introduce a project about [LinkIt ONE](https://www.seeedstudio.com/depot/LinkIt-ONE-p-2017.html) using SD Card.
+
+### Music Player with LinkIt One
+
+
+
+This project uses Grove - Water Sensor to create a simple but effective solution to watering plants.
+
+[Make it NOW!](https://www.seeedstudio.com/recipe/246-music-player-with-linkit-one.html)
+
+[***More Awesome Projects by SD Card***](https://www.seeedstudio.com/recipe/index.php?query=SD+Card)
+
+Features
+--------
+
+- Standard SD card, SDHC card and TF card compatible
+- UART Grove & I2C connection compatible
+- Fully supported SD Library
+- Minimal number of SPI port
+- Truly stackable
+
+Specifications
+--------------
+
+
+
+**Pins usage on Arduino (with SD card)**
+
+D4: SD_CS;
+
+D11: SD_DI;
+
+D12: SD_DO;
+
+D13: SD_CLK.
+
+:::note
+The SD card format can be FAT16 or FAT32.The size of SD card and the SDHC card more than 16GB is not supported.
+:::
+
+Usage
+-----
+
+The following is the installation of the SD card shield.
+
+### Hardware Installation
+
+1. Insert your SD card into the socket, Plug the SD Card Shield onto the Arduino .
+2. Connect the Arduino to PC using USB cable.
+
+:::note
+When you use a Micro SD card, please insert Micro SD card into the adopter, and then insert the Micro SD card Adopter into the socket as shown below.
+:::
+
+
+
+When you complete the hardware installation, it should look like this
+
+
+
+### Upload the program
+
+1. Restart the Arduino IDE. Open "CardInfo"example via the path: File --> Examples --> SD --> CardInfo.
+
+ This example shows how use the utility libraries on which the SD library is based in order to get info about your SD card.Very useful for testing a card when
+
+ You are not sure whether its working or not. There are also many other examples in this library, like “ReadWrite”. You can always try them out.
+
+
+
+ There is a brief description to above code:
+
+ First check if the card is working. If not, there will output some reasons that may lead to this result.
+
+ In the case of the SD card normal work, it will print the SD card type.Then print the type and size of the FAT-type volume.
+
+ Finally, get the files information such as name, date and size in bytes that found on the card.
+
+2. Upload the code.
+
+3. View Results. You can see the follow image after Click the serial monitor.
+
+
+
+4. If an error occurs, please recheck all the previous steps, and make sure the SD card is working. If none of that fixes the problem, try replacing the SD card.
+
+:::note
+Arduino default code returns SD size incorrectly if your SD is card more than 4G. The following code can solve this issue.
+:::
+
+```cpp
+ /*
+ SD card test
+
+ This example shows how use the utility libraries on which the'
+ SD library is based in order to get info about your SD card.
+ Very useful for testing a card when you're not sure whether its working or not.
+
+ The circuit:
+ * SD card attached to SPI bus as follows:
+ ** MOSI - pin 11 on Arduino Uno/Duemilanove/Diecimila
+ ** MISO - pin 12 on Arduino Uno/Duemilanove/Diecimila
+ ** CLK - pin 13 on Arduino Uno/Duemilanove/Diecimila
+ ** CS - depends on your SD card shield or module.
+ ** Pin 4 used here for consistency with other Arduino examples
+
+
+ created 28 Mar 2011
+ by Limor Fried
+ modified 9 Apr 2012
+ by Tom Igoe
+ */
+ // include the SD library:
+ #include
+ #include
+
+ // set up variables using the SD utility library functions:
+ Sd2Card card;
+ SdVolume volume;
+ SdFile root;
+
+ // change this to match your SD shield or module;
+ // Arduino Ethernet shield: pin 4
+ // Adafruit SD shields and modules: pin 10
+ // Sparkfun SD shield: pin 8
+ const int chipSelect = 4;
+
+ void setup()
+ {
+ // Open serial communications and wait for port to open:
+ Serial.begin(9600);
+ while (!Serial) {
+ ; // wait for serial port to connect. Needed for Leonardo only
+ }
+
+
+ Serial.print("\nInitializing SD card...");
+ // On the Ethernet Shield, CS is pin 4. It's set as an output by default.
+ // Note that even if it's not used as the CS pin, the hardware SS pin
+ // (10 on most Arduino boards, 53 on the Mega) must be left as an output
+ // or the SD library functions will not work.
+ pinMode(10, OUTPUT); // change this to 53 on a mega
+
+
+ // we'll use the initialization code from the utility libraries
+ // since we're just testing if the card is working!
+ if (!card.init(SPI_HALF_SPEED, chipSelect)) {
+ Serial.println("initialization failed. Things to check:");
+ Serial.println("* is a card is inserted?");
+ Serial.println("* Is your wiring correct?");
+ Serial.println("* did you change the chipSelect pin to match your shield or module?");
+ return;
+ } else {
+ Serial.println("Wiring is correct and a card is present.");
+ }
+
+ // print the type of card
+ Serial.print("\nCard type: ");
+ switch (card.type()) {
+ case SD_CARD_TYPE_SD1:
+ Serial.println("SD1");
+ break;
+ case SD_CARD_TYPE_SD2:
+ Serial.println("SD2");
+ break;
+ case SD_CARD_TYPE_SDHC:
+ Serial.println("SDHC");
+ break;
+ default:
+ Serial.println("Unknown");
+ }
+
+ // Now we will try to open the 'volume'/'partition' - it should be FAT16 or FAT32
+ if (!volume.init(card)) {
+ Serial.println("Could not find FAT16/FAT32 partition.\nMake sure you've formatted the card");
+ return;
+ }
+
+
+ // print the type and size of the first FAT-type volume
+
+ uint64_t volumesize64;
+ uint32_t volumesize32;
+ Serial.print("\nVolume type is FAT");
+ Serial.println(volume.fatType(), DEC);
+ Serial.println();
+
+ volumesize64 = volume.blocksPerCluster(); // clusters are collections of blocks
+ volumesize64 *= volume.clusterCount(); // we'll have a lot of clusters
+ volumesize64 *= 512; // SD card blocks are always 512 bytes
+
+ Serial.print("Volume size (bytes): ");
+ printLLNumber(volumesize64, DEC);
+ Serial.println();
+
+ Serial.print("Volume size (Kbytes): ");
+ volumesize32 = volumesize64/1024;
+ Serial.println(volumesize32);
+
+ Serial.print("Volume size (Mbytes): ");
+ volumesize32 /= 1024;
+ Serial.println(volumesize32);
+ /*uint64_t volumesize;
+ Serial.print("\nVolume type is FAT");
+ Serial.println(volume.fatType(), DEC);
+ Serial.println();
+
+ volumesize = volume.blocksPerCluster(); // clusters are collections of blocks
+ volumesize *= volume.clusterCount(); // we'll have a lot of clusters
+ volumesize *= 512; // SD card blocks are always 512 bytes
+ Serial.print("Volume size (bytes): ");
+ Serial.println(volumesize,DEC);
+ Serial.print("Volume size (Kbytes): ");
+ volumesize /= 1024;
+ Serial.println(volumesize,DEC);
+ Serial.print("Volume size (Mbytes): ");
+ volumesize /= 1024;
+ Serial.println(volumesize,DEC);
+ */
+
+ Serial.println("\nFiles found on the card (name, date and size in bytes): ");
+ root.openRoot(volume);
+
+ // list all files in the card with date and size
+ root.ls(LS_R | LS_DATE | LS_SIZE);
+ }
+
+
+ void loop(void) {
+
+ }
+ void printLLNumber(uint64_t n, uint8_t base)
+ {
+ unsigned char buf[16 * sizeof(long)];
+ unsigned int i = 0;
+
+ if (n == 0)
+ {
+ Serial.print((char)'0');
+ return;
+ }
+
+ while (n > 0)
+ {
+ buf[i++] = n % base;
+ n /= base;
+ }
+
+ for (; i > 0; i--)
+ Serial.print((char) (buf[i - 1] < 10 ?
+ '0' + buf[i - 1] :
+ 'A' + buf[i - 1] - 10));
+ }
+```
+
+## SD Card Shield v4.0 Schematic Online Viewer
+
+
+
+Resources
+---------
+
+- [SD Card Shield v4.0 Schematic](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/SD_Card_Shiled_v4.0.pdf)
+
+- [SD Card Shield v4.0 Eagle File.zip](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/PCBA-SD%20Card%20shield%20V4.0.zip)
+
+- [SD Card Shield v4.0a Eagle File.zip](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/SD_Card_Shield_v4.0a.zip)
+
+- [SD Card Shield v4.3 Eagle file.zip](https://files.seeedstudio.com/wiki/SD_Card_shield_V4.0/res/SD_Card_Shield_v4.3_eagle_file.zip)
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
+
diff --git a/docs/Top_Brand/Arduino/shield/Shield_Introduction.md b/docs/Top_Brand/Arduino/shield/Shield_Introduction.md
index de31ddc5c788e..3d700cbfe2959 100644
--- a/docs/Top_Brand/Arduino/shield/Shield_Introduction.md
+++ b/docs/Top_Brand/Arduino/shield/Shield_Introduction.md
@@ -1,60 +1,57 @@
----
-description: Shield_Introduction
-title: Shield Introduction
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Shield_Introduction
-last_update:
- date: 01/10/2023
- author: Eico
-
-no_comments: false # for Disqus
-
----
-
----
-This section includes extension boards that created by Seeed.
-
-## Product List
----
-
-Here is the list of the Seeeduino Boards you can find in the Seeed WiKi. The list will constantly updated.
-
-- [2.8'' TFT Touch Shield v2.0](https://wiki.seeedstudio.com/2.8inch_TFT_Touch_Shield_v2.0/)
-- [4A Motor Shield](https://wiki.seeedstudio.com/4A_Motor_Shield/)
-- [Base Shield V2](https://wiki.seeedstudio.com/Base_Shield_V2/)
-- [Bluetooth Shield V2.0](https://wiki.seeedstudio.com/Bluetooth_Shield_V2/)
-- [CAN-BUS Shield V1.2](https://wiki.seeedstudio.com/CAN-BUS_Shield_V1.2/)
-- [CAN-BUS Shield V2.0](https://wiki.seeedstudio.com/CAN-BUS_Shield_V2.0/)
-- [Camera Shield](https://wiki.seeedstudio.com/Camera_Shield/)
-- [EL Shield](https://wiki.seeedstudio.com/EL_Shield/)
-- [Energy Shield](https://wiki.seeedstudio.com/Energy_Shield/)
-- [GPRS Shield V1.0](https://wiki.seeedstudio.com/GPRS_Shield_v1.0/)
-- [GPRS Shield V3.0](https://wiki.seeedstudio.com/GPRS_Shield_V3.0/)
-- [Mbed Shield](https://wiki.seeedstudio.com/mbed_Shield/)
-- [Motor Shield V2.0](https://wiki.seeedstudio.com/Motor_Shield_V2.0/)
-- [Music Shield V2.2](https://wiki.seeedstudio.com/Music_Shield_V2.2/)
-- [NFC Shield V2.0](https://wiki.seeedstudio.com/NFC_Shield_V2.0/)
-- [Protoshield Kit for Arduino](https://wiki.seeedstudio.com/Protoshield_Kit_for_Arduino/)
-- [RS232 Shield](https://wiki.seeedstudio.com/RS232_Shield/)
-- [Relay Shield v3.0](https://wiki.seeedstudio.com/Relay_Shield_v3/)
-- [SD Card shield V4.0](https://wiki.seeedstudio.com/SD_Card_shield_V4.0/)
-- [Seeed BLE Shield v1](https://wiki.seeedstudio.com/Seeed_BLE_Shield/)
-- [Small e-Paper Shield V2](https://wiki.seeedstudio.com/Small_e-Paper_Shield_V2/)
-- [Solar Charger Shield V2.2](https://wiki.seeedstudio.com/Solar_Charger_Shield_V2.2/)
-- [W5500 Ethernet Shield v1.0](https://wiki.seeedstudio.com/W5500_Ethernet_Shield_v1.0/)
-- [Wifi Shield (Fi250) V1.1](https://wiki.seeedstudio.com/Wifi_Shield_Fi250_V1.1/)
-- [Wifi Shield V2.0](https://wiki.seeedstudio.com/Wifi_Shield_V2.0/)
-
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
-
-
-
-
-
-
-
+---
+description: Shield_Introduction
+title: Shield Introduction
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /Shield_Introduction
+last_update:
+ date: 01/10/2023
+ author: Eico
+no_comments: false # for Disqus
+---
+
+---
+This section includes extension boards that created by Seeed.
+
+## Product List
+---
+
+Here is the list of the Seeeduino Boards you can find in the Seeed WiKi. The list will constantly updated.
+
+- [2.8'' TFT Touch Shield v2.0](https://wiki.seeedstudio.com/2.8inch_TFT_Touch_Shield_v2.0/)
+- [4A Motor Shield](https://wiki.seeedstudio.com/4A_Motor_Shield/)
+- [Base Shield V2](https://wiki.seeedstudio.com/Base_Shield_V2/)
+- [Bluetooth Shield V2.0](https://wiki.seeedstudio.com/Bluetooth_Shield_V2/)
+- [CAN-BUS Shield V1.2](https://wiki.seeedstudio.com/CAN-BUS_Shield_V1.2/)
+- [CAN-BUS Shield V2.0](https://wiki.seeedstudio.com/CAN-BUS_Shield_V2.0/)
+- [Camera Shield](https://wiki.seeedstudio.com/Camera_Shield/)
+- [EL Shield](https://wiki.seeedstudio.com/EL_Shield/)
+- [Energy Shield](https://wiki.seeedstudio.com/Energy_Shield/)
+- [GPRS Shield V1.0](https://wiki.seeedstudio.com/GPRS_Shield_v1.0/)
+- [GPRS Shield V3.0](https://wiki.seeedstudio.com/GPRS_Shield_V3.0/)
+- [Mbed Shield](https://wiki.seeedstudio.com/mbed_Shield/)
+- [Motor Shield V2.0](https://wiki.seeedstudio.com/Motor_Shield_V2.0/)
+- [Music Shield V2.2](https://wiki.seeedstudio.com/Music_Shield_V2.2/)
+- [NFC Shield V2.0](https://wiki.seeedstudio.com/NFC_Shield_V2.0/)
+- [Protoshield Kit for Arduino](https://wiki.seeedstudio.com/Protoshield_Kit_for_Arduino/)
+- [RS232 Shield](https://wiki.seeedstudio.com/RS232_Shield/)
+- [Relay Shield v3.0](https://wiki.seeedstudio.com/Relay_Shield_v3/)
+- [SD Card shield V4.0](https://wiki.seeedstudio.com/SD_Card_shield_V4.0/)
+- [Seeed BLE Shield v1](https://wiki.seeedstudio.com/Seeed_BLE_Shield/)
+- [Small e-Paper Shield V2](https://wiki.seeedstudio.com/Small_e-Paper_Shield_V2/)
+- [Solar Charger Shield V2.2](https://wiki.seeedstudio.com/Solar_Charger_Shield_V2.2/)
+- [W5500 Ethernet Shield v1.0](https://wiki.seeedstudio.com/W5500_Ethernet_Shield_v1.0/)
+- [Wifi Shield (Fi250) V1.1](https://wiki.seeedstudio.com/Wifi_Shield_Fi250_V1.1/)
+- [Wifi Shield V2.0](https://wiki.seeedstudio.com/Wifi_Shield_V2.0/)
+
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
+
+
+
+
\ No newline at end of file
diff --git a/docs/Top_Brand/Arduino/shield/Solar_Charger_Shield_V2.2.md b/docs/Top_Brand/Arduino/shield/Solar_Charger_Shield_V2.2.md
index 71712e44f57d8..f65cfb016285e 100644
--- a/docs/Top_Brand/Arduino/shield/Solar_Charger_Shield_V2.2.md
+++ b/docs/Top_Brand/Arduino/shield/Solar_Charger_Shield_V2.2.md
@@ -1,188 +1,185 @@
----
-description: Solar Charger Shield V2.2
-title: Solar Charger Shield V2.2
-
-image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /Solar_Charger_Shield_V2.2
-sku: 106990020
-last_update:
- date: 01/11/2023
- author: Eico
-
-no_comments: false # for Disqus
-
----
-
-
-
-The solar charger is a stackable shield to Arduino compatible platforms, enables adaptive battery power and act as energy harvester for in-field charging. You may use various batteries that has the voltage of 3.0V-4.2V to shift up for 5V output, or put on Li-ion battery and solar panel to form an autonomous sensor unit. The maximum current provided by the board can get up to 600mA. An usb connector is also useful to charge the battery.
-
-
-
-## Features
-
----
-
-* Short circuit protection
-
-* 3W Output Power when connecting battery
-
-* Continuous Charge Current Up to 900mA
-
-* Battery status indication ( Red : Charging , Green: Charged )
-
-* Micro-USB Connector
-
-## Specification
-
----
-
-* Battery input voltage: 3.0~4.5V
-
-* USB input voltage: 4.75~5.25V
-
-* Solar input voltage: 4.8~6V
-
-* Maximum Output Power(with battery): 3W(600mA@5V)
-
-* Ripple voltage:<100mV @ 500mA
-
-* Dimensions: 68*53mm
-
-## Applications
-
----
-
-* Wireless sensor unit
-* Solar charge
-* Tweet-a-volt-arduino
-
-## Information on use of Solar panels for charging
-
----
-
-1) The solar charger shield produces charges under sunlight and light from filament bulbs. Its function is more effective in the former than in the latter. Solar panels require invisible radiations namely ultraviolet and infrared radiations for producing current.
-
-2) In order to test the system under filament bulb, hold the solar panel at a distance, less than 20cm(< 0.5 feet). However, the charging may not be effective under filament bulbs.
-
-3) Place the solar panel at an angle such that the maximum amount of sunlight is incident on it.
-
-4) Protect the solar panel from excessive exposure to water/water vapors. This may oxidize the surface of the solar panel and reduce its performance.
-
-5) The Solar panel usually comes with a protective transparent sheet of cover. Remove the transparent plastic sheet for better performance of the solar panel.
-
-6) Protect the surface of the solar panel from scratches
-
-## Caution
-
----
-
-1) The solar charger shield is designed to protect any potential short circuit. However care must be taken to avoid any such situations.
-
-2) The solar shield should not be operated at voltages greater than 5V
-
-## Usage
-
----
-
-1) Connect the Solar panel and the Li-Pol battery in their designated places as shown in the figure below:
-
-
-
-Solar_Charger_Shield_v2.2_inputs.jpg
-
-2) Place the solar under sunlight or filament bulbs as mentioned in the "Information for using solar panels" section
-
-3) Ensure that the charging (Red) light glows as shown in the figure below:
-
-
-
-4) When the battery is fully charged, the green light glows.
-
-5) Then you can mount the shield on to the arduino. As you power up the solar charger shield, it should power up the arduino as shown in the figure below:
-
-
-
-## Testing the solar shield with a simple arduino program
-
----
-This section will teach you how to measure the voltage of Lipo Battery.
-
-In order to connect the VBAT pin to Analog pin A0, so that we can read the data from A0 pin, we need to Short R7 using a 0ohm resistor as shown in the figure
-
-
-
-### Programming Example
-
-You can measure the voltage of Battery using the following example:
-
-```cpp
-/*
- Solar charger shield voltage measurement example. Connect VBAT pin to analog pin A0.
-
- The pin measures 2.0 V when not under direct exposre to sunlight and 5V when exposed to sunlight.
-
- This example code is in the public domain.
-
- */
-
-// These constants won't change. They're used to give names
-// to the pins used:
-const int analogInPin = A0; // Analog input pin that the VBAT pin is attached to
-
-
-int BatteryValue = 0; // value read from the VBAT pin
-float outputValue = 0; // variable for voltage calculation
-
-void setup() {
- // initialize serial communications at 9600 bps:
- Serial.begin(9600);
-}
-
-void loop() {
- // read the analog in value:
- BatteryValue = analogRead(analogInPin);
- // Calculate the battery voltage value
- outputValue = (float(BatteryValue)*5)/1023*2;
- // print the results to the serial monitor:
- Serial.print("Analog value = " );
- Serial.print(BatteryValue);
- Serial.print("\t voltage = ");
- Serial.println(outputValue);
- Serial.println("V \n");
-
- // wait 10 milliseconds before the next loop
- // for the analog-to-digital converter to settle
- // after the last reading:
- delay(10);
-}
-```
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
----
-* [Solar Charger Shield v2.2 sch&pcb](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/Solar_Charger_Shield_v2.2_sch_pcb.zip)
-
-* [Solar Charger Shield v2.2.pdf](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/Solar%20Charger%20Shield%20v2.2.pdf)
-* [DSE-CN3065.pdf](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/DSE-CN3065.pdf)
-
-* [ETA1036.pdf](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/ETA1036.pdf)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+The solar charger is a stackable shield to Arduino compatible platforms, enables adaptive battery power and act as energy harvester for in-field charging. You may use various batteries that has the voltage of 3.0V-4.2V to shift up for 5V output, or put on Li-ion battery and solar panel to form an autonomous sensor unit. The maximum current provided by the board can get up to 600mA. An usb connector is also useful to charge the battery.
+
+
+
+## Features
+
+---
+
+* Short circuit protection
+
+* 3W Output Power when connecting battery
+
+* Continuous Charge Current Up to 900mA
+
+* Battery status indication ( Red : Charging , Green: Charged )
+
+* Micro-USB Connector
+
+## Specification
+
+---
+
+* Battery input voltage: 3.0~4.5V
+
+* USB input voltage: 4.75~5.25V
+
+* Solar input voltage: 4.8~6V
+
+* Maximum Output Power(with battery): 3W(600mA@5V)
+
+* Ripple voltage:<100mV @ 500mA
+
+* Dimensions: 68*53mm
+
+## Applications
+
+---
+
+* Wireless sensor unit
+* Solar charge
+* Tweet-a-volt-arduino
+
+## Information on use of Solar panels for charging
+
+---
+
+1) The solar charger shield produces charges under sunlight and light from filament bulbs. Its function is more effective in the former than in the latter. Solar panels require invisible radiations namely ultraviolet and infrared radiations for producing current.
+
+2) In order to test the system under filament bulb, hold the solar panel at a distance, less than 20cm(< 0.5 feet). However, the charging may not be effective under filament bulbs.
+
+3) Place the solar panel at an angle such that the maximum amount of sunlight is incident on it.
+
+4) Protect the solar panel from excessive exposure to water/water vapors. This may oxidize the surface of the solar panel and reduce its performance.
+
+5) The Solar panel usually comes with a protective transparent sheet of cover. Remove the transparent plastic sheet for better performance of the solar panel.
+
+6) Protect the surface of the solar panel from scratches
+
+## Caution
+
+---
+
+1) The solar charger shield is designed to protect any potential short circuit. However care must be taken to avoid any such situations.
+
+2) The solar shield should not be operated at voltages greater than 5V
+
+## Usage
+
+---
+
+1) Connect the Solar panel and the Li-Pol battery in their designated places as shown in the figure below:
+
+
+
+Solar_Charger_Shield_v2.2_inputs.jpg
+
+2) Place the solar under sunlight or filament bulbs as mentioned in the "Information for using solar panels" section
+
+3) Ensure that the charging (Red) light glows as shown in the figure below:
+
+
+
+4) When the battery is fully charged, the green light glows.
+
+5) Then you can mount the shield on to the arduino. As you power up the solar charger shield, it should power up the arduino as shown in the figure below:
+
+
+
+## Testing the solar shield with a simple arduino program
+
+---
+This section will teach you how to measure the voltage of Lipo Battery.
+
+In order to connect the VBAT pin to Analog pin A0, so that we can read the data from A0 pin, we need to Short R7 using a 0ohm resistor as shown in the figure
+
+
+
+### Programming Example
+
+You can measure the voltage of Battery using the following example:
+
+```cpp
+/*
+ Solar charger shield voltage measurement example. Connect VBAT pin to analog pin A0.
+
+ The pin measures 2.0 V when not under direct exposre to sunlight and 5V when exposed to sunlight.
+
+ This example code is in the public domain.
+
+ */
+
+// These constants won't change. They're used to give names
+// to the pins used:
+const int analogInPin = A0; // Analog input pin that the VBAT pin is attached to
+
+
+int BatteryValue = 0; // value read from the VBAT pin
+float outputValue = 0; // variable for voltage calculation
+
+void setup() {
+ // initialize serial communications at 9600 bps:
+ Serial.begin(9600);
+}
+
+void loop() {
+ // read the analog in value:
+ BatteryValue = analogRead(analogInPin);
+ // Calculate the battery voltage value
+ outputValue = (float(BatteryValue)*5)/1023*2;
+ // print the results to the serial monitor:
+ Serial.print("Analog value = " );
+ Serial.print(BatteryValue);
+ Serial.print("\t voltage = ");
+ Serial.println(outputValue);
+ Serial.println("V \n");
+
+ // wait 10 milliseconds before the next loop
+ // for the analog-to-digital converter to settle
+ // after the last reading:
+ delay(10);
+}
+```
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+---
+* [Solar Charger Shield v2.2 sch&pcb](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/Solar_Charger_Shield_v2.2_sch_pcb.zip)
+
+* [Solar Charger Shield v2.2.pdf](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/Solar%20Charger%20Shield%20v2.2.pdf)
+* [DSE-CN3065.pdf](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/DSE-CN3065.pdf)
+
+* [ETA1036.pdf](https://files.seeedstudio.com/wiki/Solar_Charger_Shield_V2.2/res/ETA1036.pdf)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-The Spartan Edge Accelerator Board (SEA Board in short) is a lightweight FPGA development board, it is based on the Xilinx Spartan-7 chip and follows the Arduino shield form factor. Hence, you can use it as an Arduino shield to driver an LCD and a camera or as a stand-alone FPGA development board. Besides, with the help of on-board ESP32 chip, the SEA board also enables your Arduino with WiFi and Bluetooth function.
-
-**Spartan-7** is the newest and most cost-effective FPGA chip among Xilinx’s FPGA family, offers the best in class performance per watt.
-
-On top of that, we provide the full FPGA APIs for Arduino, which means Arduino users are able to use the FPGA function without knowing anything about FPGA. This board will broaden Arduino’s capability in many ways like simple image processing and computer vision application, signal encryption and decryption, and signal sampling and processing.
-
-## Features
-
-#### High-speed image processing
-
-- Integrated mipi, mini HDMI interface
-- Supports Raspberry Pi camera v1.0 (OV5640)
-- Maximum support for 30fps image transmission
-
-#### Encrypted Internet of Things
-
-- IoT WiFi and Bluetooth with ESP32
-- Support AWS, Azure and other cloud services
-- Support software encryption algorithm
-
-#### Multiple I/O port extensions
-
-- 20 user-defined extended I/O ports(Stand-alone mode)
-- 10 user-defined extended I/O ports(Arduino shield mode)
-- Full FPGA APIs for Arduino
-
-#### Onboard functional modules
-
-- 8-bit ADC & DAC
-- 6-axis accelerometer & gyroscope
-- 2 user RGB LEDs & buttons
-
-#### Two customized development modes
-
-- Arduino Shield Mode
-- FPGA Stand Alone Mode
-
-_Remarks: Users can choose different pin headers according to different needs and solder the pins according to their development needs._
-
-## Target users
-
-- Arduino Developers
-- IoT Developers
-- FPGA Developers
-
-## Applicable Cases
-
-- MIPI camera input and HDMI output Vivado engineering
-- On-board LED, DIP switch, ADC and DAC reference case
-- Onboard gyroscope case
-- Provide GPIO/UART/ADC/DAC/RGB-LED expansion for Arduino
-- Signal generator case (requires Arduino configuration)
-- ESP32 controlled signal generator case
-- Use the AWS GreenGrass IoT platform case
-- Color recognition and object tracking case
-- Graphic recognition case (triangle, circle and square recognition)
-- Digital Character Recognition Case
-- AES encryption and decryption algorithm implementation in FPGA
-- Implementation of the PID algorithm in the FPGA
-
-_New applications will be updated............._
-
-For more case resources, please visit [this Github page.](https://github.com/Pillar1989)
-
-## Specifications
-
-
-
-
-
Parameter
-
Value
-
-
-
FPGA
-
-
-
-
FPGA Chip
-
Spartan-7 XC7S15
-
-
-
Logic Cells
-
12,800
-
-
-
Slics
-
2000
-
-
-
CLB Flip-Flops
-
16000
-
-
-
Max. Distributed RAM (Kb)
-
150
-
-
-
Block RAM/FIFO w / ECC (36 kb each)
-
10
-
-
-
Max. Distributed RAM (Kb)
-
150
-
-
-
Total Block RAM (Kb)
-
360
-
-
-
Max. Distributed RAM (Kb)
-
150
-
-
-
Clock Mgmt Tiles (1 MMCM + 1 PLL)
-
2
-
-
-
DSP Slices
-
20
-
-
-
Wireless
-
-
-
-
Wireless Chip
-
Espressif ESP32-D0WDQ6
-
-
-
WiFi
-
802.11 b/g/n 2.4GHz
-
-
-
Bluetooth
-
Bluetooth 4.1 with BLE
-
-
-
Peripheral
-
-
-
-
Video
-
Mini HDMI x1
-
-
-
Camera
-
CSI/MIPI interface x1 (compatible with Raspberry Pi Camera V1 - OV5640)
-
-
-
SD card
-
20
-
-
-
DSP Slices
-
Micro SD/TF card slot x1
-
-
-
FPGA GPIO
-
10 pins header (IO9~IO0)
-
-
-
Arduino GPIO
-
32 pins header (Arduino form factor)
-
-
-
Grove
-
Grove Connector x2 (I2C/D2)
-
-
-
LED
-
Monochrome LED x2 RGB LED x2
-
-
-
Button
-
Boot x1 Reset x1 FPGA Reset x1 User x2
-
-
-
Switch
-
Power Mode Switch x1 5-Channel DIP Switch x1
-
-
-
Power
-
-
-
-
Operating Voltage
-
5V
-
-
-
IO Voltage
-
5V
-
-
-
Power Mode
-
USB Type C 5V VIN 8~17V Arduino Micro USB 5V
-
-
-
Other
-
-
-
-
ADC
-
8 bit ADC1173
-
-
-
Accelerometer and Gyroscope
-
6-axis LSM6DS3TR
-
-
-
-:::caution
-The SEA shield's IO voltage is 5V, and the FPGA's IO voltage is 3.3V, so we made a voltage divider to make the IOs voltage compatible. The 3.3V IO voltage of the SAM D21 series will be less than 3.3V after voltage division, which is not enough to drive the FPGA's IO. Therefore, at present, the SEA development board only supports the 5V IO Arduino board, such as [Arduino UNO](https://www.seeedstudio.com/Arduino-Uno-Rev3-p-2995.html) and [Seeeduino V4.2](https://www.seeedstudio.com/Seeeduino-V4-2-p-2517.html).
-:::
-
-## Hardware Overview
-
-
-
-
-
-
-
Number
-
Detail
-
-
-
1
-
FPGA : XC7S15-1FTGB196C
-
-
-
2
-
WiFi/Bluetooth : ESP32-D0WDQ6
-
-
-
3
-
6-axis Accelerometer and Gyroscope : LSM6DS3TR
-
-
-
4
-
DAC : DAC7311IDCKR
-
-
-
5
-
Buck-DCDC : TPS62130
-
-
-
6
-
USB-to-UART : CP2102-GMR
-
-
-
7
-
USB : Type-C
-
-
-
8
-
Mini HDMI
-
-
-
9
-
CSI Interface :MIPI Camera (compatible with Raspberry Pi Camera V1 - OV5640)
-
-
-
10
-
Arduino Header : Compatible with Arduino UNO
-
-
-
11
-
DIP Switchs : K1-K4 user switchs K5 Switch FPGA Programming Mode ->>>> JTAG : Using Xilinx official Programming Tool ->>>> Slave : Using ESP32 to Program the FPGA
-
-
-
12
-
ESP32 Button :Boot and RST
-
-
-
13
-
FPGA Button :USER1 USER2 FPGA_RST
-
-
-
14
-
User LED: L1/L2/RGB1/RGB2 PWR : Power On FPGA_DONE : Light up after programming the FPGA with esp32.
-
-
-
15
-
Power Switch : USB->Powered by USB Type C (5V DC) 5V->Powered by VIN Pin (8~17V DC)
-
-
-
16
-
Power Mode: OFF->Isolate the power supply of Arduino and Shield ON->Connect Power of Arduino and Shield
-
-
-
17
-
DAC Output and ADC Input Header
-
-
-
18
-
FPGA IO : IO9~IO0
-
-
-
19
-
FPGA JTAG Download Interface
-
-
-
20
-
Grove Connector : 1x I2C; 1x D2&D3
-
-
-
21
-
Ceramic chip antenna
-
-
-
22
-
ADC : ADC1173
-
-
-
23
-
SPI Flash : W25Q32JVZPIG
-
-
-
24
-
Analog Switch :DG2788A
-
-
-
25
-
LDO : XC6221B102MR
-
-
-
26
-
LDO : RT9013-18GB
-
-
-
27
-
LDO : CJ1117-3V3
-
-
-
28
-
SD card slot : Micro SD/TF card
-
-
-
-## Getting Started
-
-Spartan Edge Accelerator Board can work in two modes:
-
-- Arduino shield Mode
-- Stand-alone Mode
-
-In brief, it can work as a Arduino shield to bring the Arduino FPGA and Wireless features, it also can work as a FPGA development board without an Arduino.
-
-### Arduino shield Mode
-
-In this wiki, we use Seeeduino V4.2, you can also use Arduino UNO, they are fully compatible with each other.
-
-#### Hardware
-
-**Materials required**
-
-- [Seeeduino V4.2](https://www.seeedstudio.com/Seeeduino-V4-2-p-2517.html) x1
-- [Spartan Edge Accelerator Board](#A) x1
-- [Micro SD card or TF card](https://www.seeedstudio.com/micro-SD-Card-Card-with-Card-Reader-32GB-Class-10-p-4082.html) x1
-- [USB Type C data cable](https://www.seeedstudio.com/USB-Type-C-to-A-Cable-1Meter-p-4085.html) x1
-
-**Hardware Connection**
-
-- Step1. Insert the Micro SD card or TF card into the SD card slot
-- Step2. Plug the SEA Board into the Arduino
-- Step3. Use one of the following three methods to power the system
-
-
-
-
-
Power Port
-
Input Voltage
-
Power Switch Position
-
Power Mode Position
-
-
-
Powered by SEA board USB Type C port
-
5V DC
-
USB
-
ON
-
-
-
Powered by Seeeduino V4.2 micro USB port
-
5V DC
-
-
-
ON
-
-
-
Powered by Seeeduino V4.2 DC port
-
8~17V DC
-
5V
-
ON
-
-
-
-
-
-:::caution
-You can also power both the SEA board and the Arduino at the same time, but please make sure you have set the Power Mode Position to **OFF**. Only then, the system power will be isolated, and you can power the Arduino and SEA board separately.
-:::
-
--------
-
-#### Spartan Edge Accelerator Board ESP32 Boot
-
-Firstly, to work with Arduino, we should load bitstream(FPGA Logic) from SD Card to the on-board FPGA(xc7s15). The following library will show you how to do this via on-board ESP32.
-
-a library for Spartan Edge Accelerator Board
-
-The purpose of this library is to load bitstream(FPGA Logic) from SDCard to the on-board FPGA(xc7s15) by the on-board ESP32.
-
-The software development environment is [Arduino IDE](https://www.arduino.cc/en/Main/Software) with [ESP32 Boards support](https://github.com/espressif/arduino-esp32).
-
-Since Version 1.6.4, Arduino allows installation of third-party platform packages using Boards Manager. We have packages available for Windows, Mac OS, and Linux (32 and 64 bit).
-
-- Install the current upstream Arduino IDE at the 1.8 level or later. The current version is at the [Arduino website](https://arduino.cc/en/main/software).
-- Start Arduino and open Preferences window.
-- Enter ```https://dl.espressif.com/dl/package_esp32_index.json``` into _Additional Board Manager URLs_ field. You can add multiple URLs, separating them with commas.
-- Open Boards Manager from Tools > Board menu and install _esp32_ platform (and don't forget to select your ESP32 board from Tools > Board menu after installation).
-- select _**tool->board->DOIT ESP32 DEVKIT**_
-
-Stable release link: `https://dl.espressif.com/dl/package_esp32_index.json`
-Development release link: `https://dl.espressif.com/dl/package_esp32_dev_index.json`
-If you want more details, you can click the [link](https://github.com/espressif/arduino-esp32)
-
-##### Library Usage
-
-- **1.Download the ESP32 Boot Library**
-
-
-
-Then add this library to your Arduino IDE.
-
-If you don't know how to install the library, please kindly check:
-
- [Installing Additional Arduino Libraries](https://www.arduino.cc/en/Guide/Libraries)
-
- You can find two example folders in this library
-
-
-
-
-
-
-
Example
-
Description
-
-
-
01LoadDefaultBitstream
-
This example will load SDCard file /overlay/default.bit to FPGA
-
-
-
02LoadConfigBitstream
-
This example will read a ini format file /board_config.ini in SDCard,then load the bitstream spcified by the value of key overlay_on_boot to FPGA.
-
-
-
-- **2.Prepare SDCard**
- 2.1 Format the SDCard with FAT16/FAT32 filesystem.
-
-
-
- 2.2 Create a top level subfolder named **overlay** in the SDCard.
- 2.3 Put your bitstream or [sample bitstream](https://github.com/Pillar1989/Demo_project/tree/master/spi2gpio) files (must have a extend name .bit) into the folder **overlay**.
-
-:::tip
-The sample bitsteam : GPIO extension controlled by SPI interface, with support of ADC/DAC/RGB-LED, see [source code](https://github.com/Pillar1989/Demo_project/tree/master/spi2gpio).
-:::
-
- 2.4 If you run example 01LoadDefaultBitstream, rename the bitstream file in **overlay** to **default.bit**.
-
-
-
- 2.5 If you run example 02LoadConfigBitstream, put [**board_config.ini**](https://github.com/Pillar1989/spartan-edge-esp32-boot/blob/master/extras/board_config.ini) into SDCard root folder.
- 2.6 Insert the SDCard to the Spartan (Edge Accelerator) Board.
-
-- **3.Upload example**
- 3.1 Connect the Spartan Board through USB Type-C wire to the PC, and install USB232 driver (chip CP2102).
- 3.2 Turn the power switch (near the USB Type-C slot) to USB side to power on the board.
- 3.3 Open one of the library examples by Arduino IDE.
- 3.4 Check Board & Port setting in Arduino IDE as described in last section.
- 3.5 Press 'BOOT' Button on Sparton Board and last more than 1 seconds to force ESP32 enter Bootloader mode.
- 3.6 Press 'Upload' button in Arduino IDE to upload the example ('s compiled binary) to ESP32.
-
-- **4.Run example**
- 4.1 Make sure the on-board DIP-switch K5 (last one) on Slave(ON) side, which enable FPGA programing by other device(MCU).
- 4.2 Press 'RST' button on Spartan Board to startup the example.
- 4.3 After the example bootup a few seconds, the FPGA_DONE(red color) LED on the board will light on.
-
-------
-
-#### Spartan Edge Accelerator Board IO Example
-
-Then, the following tutorial will show you how to control the GPIO/ADC/DAC/RGB-LED resources of Spartan Edge Accelerator Board with Arduino.
-
-- Download the IO Example Library:
-
-
-
-- Add this library to your Arduino IDE. If you don't know how to install the library, please kindly check:
-
- [Installing Additional Arduino Libraries](https://www.arduino.cc/en/Guide/Libraries)
-
-- Located to the `examples` folder, choose any example, double cilck the .ino file.
-
-- Upload the demo. If you do not know how to upload the code, please check [How to upload code](https://wiki.seeedstudio.com/Upload_Code/).
-
-### Stand-alone Mode
-
-#### Hardware
-
-**Materials required**
-
-- [Spartan Edge Accelerator Board](#A) x1
-- [USB Type C data cable](https://www.seeedstudio.com/USB-Type-C-to-A-Cable-1Meter-p-4085.html) x1
-
-Just power the Spartan Edge Accelerator Board via the USB Type C cable.
-
-#### Software
-
-Spartan Edge Accelerator Board can also work as a traditional FPGA development board. The following traditional will show you how to use it at the stand-alone mode.
-
-In this section, you will learn about the Project mode features for project creation, source file management, design analysis, constraint definition, and synthesis and implementation run management. This could be used as a quick reference.
-
-First of all, you should download the vivado tutorial library, we will need some sorce files.
-
-
-
-- **Step 1: Creating a Project**
-
- _Launching Vivado_
-
- _Creating a New Project_
-
-1. After Vivado opens, select **Create Project** on the Getting Started page.
-
-2. Click **Next** in the New Project wizard
-
-3. Specify the Project Name and Location (Select “**Create project subdirectory**” to create a folder for your project)
-
-4. Click **Next**.
-
-5. Select **RTL Project** as the **Project Type** and click **Next**.(Select **Do not specify sources at this time** and add your files soon afterwards)
-
- _(The Vivado Design Suite allows for different design entry points depending on your source file types and design tasks. You can choose the suitable type of project.)_
-
-6. Select the **xc7s15ftgb196-1** part for project, and click Next, as shown in figure 1.
-
-7. Click **Finish**
-
-
-
-The Vivado IDE opens project_tutorial in the default layout, as shown in figure 2.
-
-
-
-The **Flow Navigator** shows the basic design process clearly.
-
-The **Sources** is made up of **Constraints**, **Simulation** **Sources** and **Utility** **Sources**.
-
-The **Design Runs** creates synth_1 and impl_1 by default.
-
-The **running status** of vivado is displayed in the upper right corner.
-
-- **Step 2: Add and Create Your Files**
-
- *in this step, we add **test.v** , **test_pin.xdc** , **test_sim.v** in our project. These files are located in different folders of **vivado_tutorial/vivado_tutorial.srcs***
-
-1. Click **Add Sources** in the **PROJECT MANAGER** of the Flow **Navigator** to add **RTL file**.
-
-2. Select **Add or create design sources** and click Next.
-
-3. Click the button and select options or click the options directly to add or create files, as shown in figure 3.
-
-
-
-4. Here, we add RTL files directly. Select **Add Files** and add file **test.v** in your directory, as shown in figure 4.
-
-
-
-5. Click **Finish**.
-
-6. Click **Add Sources** in the **PROJECT MANAGER** of the Flow **Navigator** again to add **constraints file**.
-
-7. Select **Add or create constraints** and click Next.
-
-8. Click **Add Files** and add your constraints file **test_pin.xdc** ,as shown in figure 5
-
-
-
-9. Click **Finish**.
-
-10. Click **Add Sources** in the **PROJECT MANAGER** of the Flow **Navigator** again to add **simulation file**.
-
-11. Select **Add or create simulation sources** and click Next.
-
-12. Click **Add Files** and add your simulation file **test_sim.v** ,as shown in figure 6
-
-
-
-13. Click **Finish**.
-
- Finally, the file we added will appear in the **Sources**, as shown in figure 7.
-
-
-
-- **Step 3: Elaborating the RTL Design**
-
- The Vivado IDE includes an RTL analysis and IP customizing environment. There are also several RTL Design Rule Checks (DRCs) to examine ways to improve performance or power on the RTL design.
-
-1. Select Open Elaborated Design in the Flow Navigator to elaborate the design.
-
-2. Ensure that the Layout Selector pull down menu in the main Toolbar has Default Layout selected. The Elaborated Design enables various analysis views including an RTL Netlist, Schematic, and Graphical Hierarchy. The views have a cross-select feature, which helps you to debug and optimize the RTL.
-
-3. Explore the logic hierarchy in the RTL Netlist window and examine the Schematic. You can traverse the schematic by double-clicking on cells to push into the hierarchy, or by using commands like the Expand Cone or Expand/Collapse from the Schematic popup menu.
-
-4. Select any logic instance in the Schematic and right-click to select the **Go to Source** or **Go to Definition** commands.
-
-5. Click the Messages window at the bottom of the Vivado IDE, and examine the messages.
-
-6. Click the **Collapse All** button in the Messages toolbar.
-
-7. Expand the Elaborated Design and the messages, as shown in figure 8.
-
-
-
-8. Click one of the links and the Text Editor opens the RTL source file with the relevant line highlighted.
-9. Close the Text Editor windows.
-10. Close the Elaborated Design by clicking on the **X** on the right side of the Elaborated Design window banner, and click OK to confirm.
-
-- **Step 4: Using the IP Catalog**
-
- The Xilinx IP Catalog provides access to the Vivado IP configuration and generation features. You can sort and search the Catalog in a variety of ways. IP can be customized, generated, and instantiated.
-
-1. Click the **IP Catalog** button in the Flow Navigator, under Project Manager.
-
-2. Browse the IP Catalog to examine the various categories and IP filtering capabilities.
-
-3. Choose the corresponding IP and perform native customization and configuration of IP within the tool and select **OK**
-
-4. Close the IP Catalog tab by clicking on the X on the window tab.
-
-- **Step 5: Running Behavioral Simulation**
-
- The Vivado IDE integrates the Vivado Simulator, which enables you to add and manage simulation sources in the project. You can configure simulation options, and create and manage simulation source sets. You can run behavioral simulation on RTL sources, prior to synthesis.
-
-1. In the Flow Navigator, under Project Manager, click the Settings command. The Settings dialog box opens with Project Settings at the top, and Tool Settings below that, as shown in figure 9.
-
-
-
-2. Examine the settings available on the **Simulation** page, then click **Cancel** to close the dialog box.
-3. Click the **Run Simulation** command in the Flow Navigator, then click the **Run Behaviora Simulation** in the sub-menu, as shown in figure 10.
-
-
-
-4. Drag the bar to the left and use these tools to zoom in or zoom out to see the appropriate image, as shown in figure 11 and figure 12.
-
-
-
-
-
-5. Click **X** on the Right-Up corner of figure 13 and click **OK** to close the SIMULATION.
-
-
-
-- **Step 6: Reviewing Design Run Settings**
-
- Design runs are a way of configuring and storing the many options available in the different steps of the synthesis and implementation process. You can configure these options and save the configurations as strategies to be used in future runs.
-
-1. In the Flow Navigator, under Project Manager, click the **Settings** command.
-
-2. Select the **Synthesis** page under Project Settings. For a complete description of these options, see the _Vivado Design Suite User Guide: Synthesis_([UG901](https://www.xilinx.com/support/documentation/sw_manuals/xilinx2018_3/ug901-vivado-synthesis.pdf)).
-
-3. Select the **Implementation** page under Project Settings. For a complete description of these options, see the _Vivado Design Suite User Guide: Implementation_([UG904](https://www.xilinx.com/support/documentation/sw_manuals/xilinx2018_3/ug904-vivado-implementation.pdf )).
-
-- **Step 7: Synthesizing and Implementing the Design**
-
- After configuring the synthesis and implementation run options, you can **run synthesis** and **run implementation** in the **Design Runs** or click the button or click corresponding buttons in the **Flow Navigator** to do this. The **running status** of vivado is displayed in the upper right corner while Synthesizing and Implementing.
-
- For this tutorial, we will run these steps in the Design Runs.
-
-1. Right click the syth_1 and select **Launch Runs**, as shown in figure 14.
-
-
-
-2. Click ok and running status is displayed in the upper right corner, as shown in figure 15.
-
-
-
-3. Click **Open Synthesized Design** for further design and analysis. You can see **Report Timing Summary** , **Report Utilization** and others, as shown in figure 16.
-
-
-
-4. Run Implementation in the same way, as shown in figure 17.
-
-
-
-5. Click **Open implemented Design** to see reports after implementation
-
-- **Step 8: Generating a Bitstream File**
-
- After **Implementing the Design,** we can see synthesis and implement Complete in the **Design Runs**,as shown in figure 18.
-
-
-
- Click **Generate Bitstream** in the Flow Navigator.
-
-- **Step 9: Download the file**
-
- After **Generate Bitstream,** you have two ways to load the file to FPGA.
-
- You can use the JTAG interface(on the Right-Up corner of figure 19) to load the bit file to FPGA in vivado, or use the ESP32 (on the Right-Down corner of figure 19) to load the bit file to FPGA.
-
-
-
- **Follow below steps, to load bitstream to FPGA through JTAG interface**
-
-1. Power the board and connect the [Platform Cable USB II](https://www.xilinx.com/products/boards-and-kits/hw-usb-ii-g.html) (Or Compatible Cable).
-
-2. Click **Open Target** and **Auto Connect** in the Flow Navigator.
-
-3. While connect to the board successfully, click **Program Device** and choose the bit file and click **Program**, as shown in figure 20
-
-
-
-1. After download the bit file, the **FPGA**_**DONE** **led** will light.
-
- *In this project, if you press any key or both of them(**USER1** and **USER2**), **LED L1** will go out.*
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-- **[PDF]** [Spartan-7 FPGAs Datasheet](https://files.seeedstudio.com/wiki/Spartan-Edge-Accelerator-Board/res/Spartan-7%20FPGAs%20Data%20Sheet.pdf)
-- **[PDF]** [ESP32 Datasheet](https://files.seeedstudio.com/wiki/Spartan-Edge-Accelerator-Board/res/ESP32-datasheet.pdf)
-- **[PDF]** [Spartan-Edge-Accelerator-Board Eagle File](https://github.com/SeeedDocument/Spartan-Edge-Accelerator-Board/tree/master/res/Spartan%20Edge%20Accelerator%20Board%20v1.0/202002626_Spartan%20Edge%20Accelerator%20Board%20v1.0_SCH%20%26%20PCB)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+The Spartan Edge Accelerator Board (SEA Board in short) is a lightweight FPGA development board, it is based on the Xilinx Spartan-7 chip and follows the Arduino shield form factor. Hence, you can use it as an Arduino shield to driver an LCD and a camera or as a stand-alone FPGA development board. Besides, with the help of on-board ESP32 chip, the SEA board also enables your Arduino with WiFi and Bluetooth function.
+
+**Spartan-7** is the newest and most cost-effective FPGA chip among Xilinx’s FPGA family, offers the best in class performance per watt.
+
+On top of that, we provide the full FPGA APIs for Arduino, which means Arduino users are able to use the FPGA function without knowing anything about FPGA. This board will broaden Arduino’s capability in many ways like simple image processing and computer vision application, signal encryption and decryption, and signal sampling and processing.
+
+## Features
+
+#### High-speed image processing
+
+- Integrated mipi, mini HDMI interface
+- Supports Raspberry Pi camera v1.0 (OV5640)
+- Maximum support for 30fps image transmission
+
+#### Encrypted Internet of Things
+
+- IoT WiFi and Bluetooth with ESP32
+- Support AWS, Azure and other cloud services
+- Support software encryption algorithm
+
+#### Multiple I/O port extensions
+
+- 20 user-defined extended I/O ports(Stand-alone mode)
+- 10 user-defined extended I/O ports(Arduino shield mode)
+- Full FPGA APIs for Arduino
+
+#### Onboard functional modules
+
+- 8-bit ADC & DAC
+- 6-axis accelerometer & gyroscope
+- 2 user RGB LEDs & buttons
+
+#### Two customized development modes
+
+- Arduino Shield Mode
+- FPGA Stand Alone Mode
+
+_Remarks: Users can choose different pin headers according to different needs and solder the pins according to their development needs._
+
+## Target users
+
+- Arduino Developers
+- IoT Developers
+- FPGA Developers
+
+## Applicable Cases
+
+- MIPI camera input and HDMI output Vivado engineering
+- On-board LED, DIP switch, ADC and DAC reference case
+- Onboard gyroscope case
+- Provide GPIO/UART/ADC/DAC/RGB-LED expansion for Arduino
+- Signal generator case (requires Arduino configuration)
+- ESP32 controlled signal generator case
+- Use the AWS GreenGrass IoT platform case
+- Color recognition and object tracking case
+- Graphic recognition case (triangle, circle and square recognition)
+- Digital Character Recognition Case
+- AES encryption and decryption algorithm implementation in FPGA
+- Implementation of the PID algorithm in the FPGA
+
+_New applications will be updated............._
+
+For more case resources, please visit [this Github page.](https://github.com/Pillar1989)
+
+## Specifications
+
+
+
+
+
Parameter
+
Value
+
+
+
FPGA
+
+
+
+
FPGA Chip
+
Spartan-7 XC7S15
+
+
+
Logic Cells
+
12,800
+
+
+
Slics
+
2000
+
+
+
CLB Flip-Flops
+
16000
+
+
+
Max. Distributed RAM (Kb)
+
150
+
+
+
Block RAM/FIFO w / ECC (36 kb each)
+
10
+
+
+
Max. Distributed RAM (Kb)
+
150
+
+
+
Total Block RAM (Kb)
+
360
+
+
+
Max. Distributed RAM (Kb)
+
150
+
+
+
Clock Mgmt Tiles (1 MMCM + 1 PLL)
+
2
+
+
+
DSP Slices
+
20
+
+
+
Wireless
+
+
+
+
Wireless Chip
+
Espressif ESP32-D0WDQ6
+
+
+
WiFi
+
802.11 b/g/n 2.4GHz
+
+
+
Bluetooth
+
Bluetooth 4.1 with BLE
+
+
+
Peripheral
+
+
+
+
Video
+
Mini HDMI x1
+
+
+
Camera
+
CSI/MIPI interface x1 (compatible with Raspberry Pi Camera V1 - OV5640)
+
+
+
SD card
+
20
+
+
+
DSP Slices
+
Micro SD/TF card slot x1
+
+
+
FPGA GPIO
+
10 pins header (IO9~IO0)
+
+
+
Arduino GPIO
+
32 pins header (Arduino form factor)
+
+
+
Grove
+
Grove Connector x2 (I2C/D2)
+
+
+
LED
+
Monochrome LED x2 RGB LED x2
+
+
+
Button
+
Boot x1 Reset x1 FPGA Reset x1 User x2
+
+
+
Switch
+
Power Mode Switch x1 5-Channel DIP Switch x1
+
+
+
Power
+
+
+
+
Operating Voltage
+
5V
+
+
+
IO Voltage
+
5V
+
+
+
Power Mode
+
USB Type C 5V VIN 8~17V Arduino Micro USB 5V
+
+
+
Other
+
+
+
+
ADC
+
8 bit ADC1173
+
+
+
Accelerometer and Gyroscope
+
6-axis LSM6DS3TR
+
+
+
+:::caution
+The SEA shield's IO voltage is 5V, and the FPGA's IO voltage is 3.3V, so we made a voltage divider to make the IOs voltage compatible. The 3.3V IO voltage of the SAM D21 series will be less than 3.3V after voltage division, which is not enough to drive the FPGA's IO. Therefore, at present, the SEA development board only supports the 5V IO Arduino board, such as [Arduino UNO](https://www.seeedstudio.com/Arduino-Uno-Rev3-p-2995.html) and [Seeeduino V4.2](https://www.seeedstudio.com/Seeeduino-V4-2-p-2517.html).
+:::
+
+## Hardware Overview
+
+
+
+
+
+
+
Number
+
Detail
+
+
+
1
+
FPGA : XC7S15-1FTGB196C
+
+
+
2
+
WiFi/Bluetooth : ESP32-D0WDQ6
+
+
+
3
+
6-axis Accelerometer and Gyroscope : LSM6DS3TR
+
+
+
4
+
DAC : DAC7311IDCKR
+
+
+
5
+
Buck-DCDC : TPS62130
+
+
+
6
+
USB-to-UART : CP2102-GMR
+
+
+
7
+
USB : Type-C
+
+
+
8
+
Mini HDMI
+
+
+
9
+
CSI Interface :MIPI Camera (compatible with Raspberry Pi Camera V1 - OV5640)
+
+
+
10
+
Arduino Header : Compatible with Arduino UNO
+
+
+
11
+
DIP Switchs : K1-K4 user switchs K5 Switch FPGA Programming Mode ->>>> JTAG : Using Xilinx official Programming Tool ->>>> Slave : Using ESP32 to Program the FPGA
+
+
+
12
+
ESP32 Button :Boot and RST
+
+
+
13
+
FPGA Button :USER1 USER2 FPGA_RST
+
+
+
14
+
User LED: L1/L2/RGB1/RGB2 PWR : Power On FPGA_DONE : Light up after programming the FPGA with esp32.
+
+
+
15
+
Power Switch : USB->Powered by USB Type C (5V DC) 5V->Powered by VIN Pin (8~17V DC)
+
+
+
16
+
Power Mode: OFF->Isolate the power supply of Arduino and Shield ON->Connect Power of Arduino and Shield
+
+
+
17
+
DAC Output and ADC Input Header
+
+
+
18
+
FPGA IO : IO9~IO0
+
+
+
19
+
FPGA JTAG Download Interface
+
+
+
20
+
Grove Connector : 1x I2C; 1x D2&D3
+
+
+
21
+
Ceramic chip antenna
+
+
+
22
+
ADC : ADC1173
+
+
+
23
+
SPI Flash : W25Q32JVZPIG
+
+
+
24
+
Analog Switch :DG2788A
+
+
+
25
+
LDO : XC6221B102MR
+
+
+
26
+
LDO : RT9013-18GB
+
+
+
27
+
LDO : CJ1117-3V3
+
+
+
28
+
SD card slot : Micro SD/TF card
+
+
+
+## Getting Started
+
+Spartan Edge Accelerator Board can work in two modes:
+
+- Arduino shield Mode
+- Stand-alone Mode
+
+In brief, it can work as a Arduino shield to bring the Arduino FPGA and Wireless features, it also can work as a FPGA development board without an Arduino.
+
+### Arduino shield Mode
+
+In this wiki, we use Seeeduino V4.2, you can also use Arduino UNO, they are fully compatible with each other.
+
+#### Hardware
+
+**Materials required**
+
+- [Seeeduino V4.2](https://www.seeedstudio.com/Seeeduino-V4-2-p-2517.html) x1
+- [Spartan Edge Accelerator Board](#A) x1
+- [Micro SD card or TF card](https://www.seeedstudio.com/micro-SD-Card-Card-with-Card-Reader-32GB-Class-10-p-4082.html) x1
+- [USB Type C data cable](https://www.seeedstudio.com/USB-Type-C-to-A-Cable-1Meter-p-4085.html) x1
+
+**Hardware Connection**
+
+- Step1. Insert the Micro SD card or TF card into the SD card slot
+- Step2. Plug the SEA Board into the Arduino
+- Step3. Use one of the following three methods to power the system
+
+
+
+
+
Power Port
+
Input Voltage
+
Power Switch Position
+
Power Mode Position
+
+
+
Powered by SEA board USB Type C port
+
5V DC
+
USB
+
ON
+
+
+
Powered by Seeeduino V4.2 micro USB port
+
5V DC
+
-
+
ON
+
+
+
Powered by Seeeduino V4.2 DC port
+
8~17V DC
+
5V
+
ON
+
+
+
+
+
+:::caution
+You can also power both the SEA board and the Arduino at the same time, but please make sure you have set the Power Mode Position to **OFF**. Only then, the system power will be isolated, and you can power the Arduino and SEA board separately.
+:::
+
+-------
+
+#### Spartan Edge Accelerator Board ESP32 Boot
+
+Firstly, to work with Arduino, we should load bitstream(FPGA Logic) from SD Card to the on-board FPGA(xc7s15). The following library will show you how to do this via on-board ESP32.
+
+a library for Spartan Edge Accelerator Board
+
+The purpose of this library is to load bitstream(FPGA Logic) from SDCard to the on-board FPGA(xc7s15) by the on-board ESP32.
+
+The software development environment is [Arduino IDE](https://www.arduino.cc/en/Main/Software) with [ESP32 Boards support](https://github.com/espressif/arduino-esp32).
+
+Since Version 1.6.4, Arduino allows installation of third-party platform packages using Boards Manager. We have packages available for Windows, Mac OS, and Linux (32 and 64 bit).
+
+- Install the current upstream Arduino IDE at the 1.8 level or later. The current version is at the [Arduino website](https://arduino.cc/en/main/software).
+- Start Arduino and open Preferences window.
+- Enter ```https://dl.espressif.com/dl/package_esp32_index.json``` into _Additional Board Manager URLs_ field. You can add multiple URLs, separating them with commas.
+- Open Boards Manager from Tools > Board menu and install _esp32_ platform (and don't forget to select your ESP32 board from Tools > Board menu after installation).
+- select _**tool->board->DOIT ESP32 DEVKIT**_
+
+Stable release link: `https://dl.espressif.com/dl/package_esp32_index.json`
+Development release link: `https://dl.espressif.com/dl/package_esp32_dev_index.json`
+If you want more details, you can click the [link](https://github.com/espressif/arduino-esp32)
+
+##### Library Usage
+
+- **1.Download the ESP32 Boot Library**
+
+
+
+Then add this library to your Arduino IDE.
+
+If you don't know how to install the library, please kindly check:
+
+ [Installing Additional Arduino Libraries](https://www.arduino.cc/en/Guide/Libraries)
+
+ You can find two example folders in this library
+
+
+
+
+
+
+
Example
+
Description
+
+
+
01LoadDefaultBitstream
+
This example will load SDCard file /overlay/default.bit to FPGA
+
+
+
02LoadConfigBitstream
+
This example will read a ini format file /board_config.ini in SDCard,then load the bitstream spcified by the value of key overlay_on_boot to FPGA.
+
+
+
+- **2.Prepare SDCard**
+ 2.1 Format the SDCard with FAT16/FAT32 filesystem.
+
+
+
+ 2.2 Create a top level subfolder named **overlay** in the SDCard.
+ 2.3 Put your bitstream or [sample bitstream](https://github.com/Pillar1989/Demo_project/tree/master/spi2gpio) files (must have a extend name .bit) into the folder **overlay**.
+
+:::tip
+The sample bitsteam : GPIO extension controlled by SPI interface, with support of ADC/DAC/RGB-LED, see [source code](https://github.com/Pillar1989/Demo_project/tree/master/spi2gpio).
+:::
+
+ 2.4 If you run example 01LoadDefaultBitstream, rename the bitstream file in **overlay** to **default.bit**.
+
+
+
+ 2.5 If you run example 02LoadConfigBitstream, put [**board_config.ini**](https://github.com/Pillar1989/spartan-edge-esp32-boot/blob/master/extras/board_config.ini) into SDCard root folder.
+ 2.6 Insert the SDCard to the Spartan (Edge Accelerator) Board.
+
+- **3.Upload example**
+ 3.1 Connect the Spartan Board through USB Type-C wire to the PC, and install USB232 driver (chip CP2102).
+ 3.2 Turn the power switch (near the USB Type-C slot) to USB side to power on the board.
+ 3.3 Open one of the library examples by Arduino IDE.
+ 3.4 Check Board & Port setting in Arduino IDE as described in last section.
+ 3.5 Press 'BOOT' Button on Sparton Board and last more than 1 seconds to force ESP32 enter Bootloader mode.
+ 3.6 Press 'Upload' button in Arduino IDE to upload the example ('s compiled binary) to ESP32.
+
+- **4.Run example**
+ 4.1 Make sure the on-board DIP-switch K5 (last one) on Slave(ON) side, which enable FPGA programing by other device(MCU).
+ 4.2 Press 'RST' button on Spartan Board to startup the example.
+ 4.3 After the example bootup a few seconds, the FPGA_DONE(red color) LED on the board will light on.
+
+------
+
+#### Spartan Edge Accelerator Board IO Example
+
+Then, the following tutorial will show you how to control the GPIO/ADC/DAC/RGB-LED resources of Spartan Edge Accelerator Board with Arduino.
+
+- Download the IO Example Library:
+
+
+
+- Add this library to your Arduino IDE. If you don't know how to install the library, please kindly check:
+
+ [Installing Additional Arduino Libraries](https://www.arduino.cc/en/Guide/Libraries)
+
+- Located to the `examples` folder, choose any example, double cilck the .ino file.
+
+- Upload the demo. If you do not know how to upload the code, please check [How to upload code](https://wiki.seeedstudio.com/Upload_Code/).
+
+### Stand-alone Mode
+
+#### Hardware
+
+**Materials required**
+
+- [Spartan Edge Accelerator Board](#A) x1
+- [USB Type C data cable](https://www.seeedstudio.com/USB-Type-C-to-A-Cable-1Meter-p-4085.html) x1
+
+Just power the Spartan Edge Accelerator Board via the USB Type C cable.
+
+#### Software
+
+Spartan Edge Accelerator Board can also work as a traditional FPGA development board. The following traditional will show you how to use it at the stand-alone mode.
+
+In this section, you will learn about the Project mode features for project creation, source file management, design analysis, constraint definition, and synthesis and implementation run management. This could be used as a quick reference.
+
+First of all, you should download the vivado tutorial library, we will need some sorce files.
+
+
+
+- **Step 1: Creating a Project**
+
+ _Launching Vivado_
+
+ _Creating a New Project_
+
+1. After Vivado opens, select **Create Project** on the Getting Started page.
+
+2. Click **Next** in the New Project wizard
+
+3. Specify the Project Name and Location (Select “**Create project subdirectory**” to create a folder for your project)
+
+4. Click **Next**.
+
+5. Select **RTL Project** as the **Project Type** and click **Next**.(Select **Do not specify sources at this time** and add your files soon afterwards)
+
+ _(The Vivado Design Suite allows for different design entry points depending on your source file types and design tasks. You can choose the suitable type of project.)_
+
+6. Select the **xc7s15ftgb196-1** part for project, and click Next, as shown in figure 1.
+
+7. Click **Finish**
+
+
+
+The Vivado IDE opens project_tutorial in the default layout, as shown in figure 2.
+
+
+
+The **Flow Navigator** shows the basic design process clearly.
+
+The **Sources** is made up of **Constraints**, **Simulation** **Sources** and **Utility** **Sources**.
+
+The **Design Runs** creates synth_1 and impl_1 by default.
+
+The **running status** of vivado is displayed in the upper right corner.
+
+- **Step 2: Add and Create Your Files**
+
+ *in this step, we add **test.v** , **test_pin.xdc** , **test_sim.v** in our project. These files are located in different folders of **vivado_tutorial/vivado_tutorial.srcs***
+
+1. Click **Add Sources** in the **PROJECT MANAGER** of the Flow **Navigator** to add **RTL file**.
+
+2. Select **Add or create design sources** and click Next.
+
+3. Click the button and select options or click the options directly to add or create files, as shown in figure 3.
+
+
+
+4. Here, we add RTL files directly. Select **Add Files** and add file **test.v** in your directory, as shown in figure 4.
+
+
+
+5. Click **Finish**.
+
+6. Click **Add Sources** in the **PROJECT MANAGER** of the Flow **Navigator** again to add **constraints file**.
+
+7. Select **Add or create constraints** and click Next.
+
+8. Click **Add Files** and add your constraints file **test_pin.xdc** ,as shown in figure 5
+
+
+
+9. Click **Finish**.
+
+10. Click **Add Sources** in the **PROJECT MANAGER** of the Flow **Navigator** again to add **simulation file**.
+
+11. Select **Add or create simulation sources** and click Next.
+
+12. Click **Add Files** and add your simulation file **test_sim.v** ,as shown in figure 6
+
+
+
+13. Click **Finish**.
+
+ Finally, the file we added will appear in the **Sources**, as shown in figure 7.
+
+
+
+- **Step 3: Elaborating the RTL Design**
+
+ The Vivado IDE includes an RTL analysis and IP customizing environment. There are also several RTL Design Rule Checks (DRCs) to examine ways to improve performance or power on the RTL design.
+
+1. Select Open Elaborated Design in the Flow Navigator to elaborate the design.
+
+2. Ensure that the Layout Selector pull down menu in the main Toolbar has Default Layout selected. The Elaborated Design enables various analysis views including an RTL Netlist, Schematic, and Graphical Hierarchy. The views have a cross-select feature, which helps you to debug and optimize the RTL.
+
+3. Explore the logic hierarchy in the RTL Netlist window and examine the Schematic. You can traverse the schematic by double-clicking on cells to push into the hierarchy, or by using commands like the Expand Cone or Expand/Collapse from the Schematic popup menu.
+
+4. Select any logic instance in the Schematic and right-click to select the **Go to Source** or **Go to Definition** commands.
+
+5. Click the Messages window at the bottom of the Vivado IDE, and examine the messages.
+
+6. Click the **Collapse All** button in the Messages toolbar.
+
+7. Expand the Elaborated Design and the messages, as shown in figure 8.
+
+
+
+8. Click one of the links and the Text Editor opens the RTL source file with the relevant line highlighted.
+9. Close the Text Editor windows.
+10. Close the Elaborated Design by clicking on the **X** on the right side of the Elaborated Design window banner, and click OK to confirm.
+
+- **Step 4: Using the IP Catalog**
+
+ The Xilinx IP Catalog provides access to the Vivado IP configuration and generation features. You can sort and search the Catalog in a variety of ways. IP can be customized, generated, and instantiated.
+
+1. Click the **IP Catalog** button in the Flow Navigator, under Project Manager.
+
+2. Browse the IP Catalog to examine the various categories and IP filtering capabilities.
+
+3. Choose the corresponding IP and perform native customization and configuration of IP within the tool and select **OK**
+
+4. Close the IP Catalog tab by clicking on the X on the window tab.
+
+- **Step 5: Running Behavioral Simulation**
+
+ The Vivado IDE integrates the Vivado Simulator, which enables you to add and manage simulation sources in the project. You can configure simulation options, and create and manage simulation source sets. You can run behavioral simulation on RTL sources, prior to synthesis.
+
+1. In the Flow Navigator, under Project Manager, click the Settings command. The Settings dialog box opens with Project Settings at the top, and Tool Settings below that, as shown in figure 9.
+
+
+
+2. Examine the settings available on the **Simulation** page, then click **Cancel** to close the dialog box.
+3. Click the **Run Simulation** command in the Flow Navigator, then click the **Run Behaviora Simulation** in the sub-menu, as shown in figure 10.
+
+
+
+4. Drag the bar to the left and use these tools to zoom in or zoom out to see the appropriate image, as shown in figure 11 and figure 12.
+
+
+
+
+
+5. Click **X** on the Right-Up corner of figure 13 and click **OK** to close the SIMULATION.
+
+
+
+- **Step 6: Reviewing Design Run Settings**
+
+ Design runs are a way of configuring and storing the many options available in the different steps of the synthesis and implementation process. You can configure these options and save the configurations as strategies to be used in future runs.
+
+1. In the Flow Navigator, under Project Manager, click the **Settings** command.
+
+2. Select the **Synthesis** page under Project Settings. For a complete description of these options, see the _Vivado Design Suite User Guide: Synthesis_([UG901](https://www.xilinx.com/support/documentation/sw_manuals/xilinx2018_3/ug901-vivado-synthesis.pdf)).
+
+3. Select the **Implementation** page under Project Settings. For a complete description of these options, see the _Vivado Design Suite User Guide: Implementation_([UG904](https://www.xilinx.com/support/documentation/sw_manuals/xilinx2018_3/ug904-vivado-implementation.pdf )).
+
+- **Step 7: Synthesizing and Implementing the Design**
+
+ After configuring the synthesis and implementation run options, you can **run synthesis** and **run implementation** in the **Design Runs** or click the button or click corresponding buttons in the **Flow Navigator** to do this. The **running status** of vivado is displayed in the upper right corner while Synthesizing and Implementing.
+
+ For this tutorial, we will run these steps in the Design Runs.
+
+1. Right click the syth_1 and select **Launch Runs**, as shown in figure 14.
+
+
+
+2. Click ok and running status is displayed in the upper right corner, as shown in figure 15.
+
+
+
+3. Click **Open Synthesized Design** for further design and analysis. You can see **Report Timing Summary** , **Report Utilization** and others, as shown in figure 16.
+
+
+
+4. Run Implementation in the same way, as shown in figure 17.
+
+
+
+5. Click **Open implemented Design** to see reports after implementation
+
+- **Step 8: Generating a Bitstream File**
+
+ After **Implementing the Design,** we can see synthesis and implement Complete in the **Design Runs**,as shown in figure 18.
+
+
+
+ Click **Generate Bitstream** in the Flow Navigator.
+
+- **Step 9: Download the file**
+
+ After **Generate Bitstream,** you have two ways to load the file to FPGA.
+
+ You can use the JTAG interface(on the Right-Up corner of figure 19) to load the bit file to FPGA in vivado, or use the ESP32 (on the Right-Down corner of figure 19) to load the bit file to FPGA.
+
+
+
+ **Follow below steps, to load bitstream to FPGA through JTAG interface**
+
+1. Power the board and connect the [Platform Cable USB II](https://www.xilinx.com/products/boards-and-kits/hw-usb-ii-g.html) (Or Compatible Cable).
+
+2. Click **Open Target** and **Auto Connect** in the Flow Navigator.
+
+3. While connect to the board successfully, click **Program Device** and choose the bit file and click **Program**, as shown in figure 20
+
+
+
+1. After download the bit file, the **FPGA**_**DONE** **led** will light.
+
+ *In this project, if you press any key or both of them(**USER1** and **USER2**), **LED L1** will go out.*
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+- **[PDF]** [Spartan-7 FPGAs Datasheet](https://files.seeedstudio.com/wiki/Spartan-Edge-Accelerator-Board/res/Spartan-7%20FPGAs%20Data%20Sheet.pdf)
+- **[PDF]** [ESP32 Datasheet](https://files.seeedstudio.com/wiki/Spartan-Edge-Accelerator-Board/res/ESP32-datasheet.pdf)
+- **[PDF]** [Spartan-Edge-Accelerator-Board Eagle File](https://github.com/SeeedDocument/Spartan-Edge-Accelerator-Board/tree/master/res/Spartan%20Edge%20Accelerator%20Board%20v1.0/202002626_Spartan%20Edge%20Accelerator%20Board%20v1.0_SCH%20%26%20PCB)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-The W5500 Ethernet Shield v1.0 can provide your projects with internet connectivity. W5500 enables users to have the Internet connectivity in their applications by using the single chip, in which TCP/IP stack, 10 / 100 Ethernet MAC and PHY embedded. The shield also has two Grove connectors and a microSD card socket to support projects which require storing large amounts of data from Grove sensor. The RJ45 port (where the Ethernet cable is connected to) is low enough to allow you to stack more shields on top of this one if needed.
-
-
-
-## Features
-
---------
-
-- Supports Hardwired TCP/IP Protocols : TCP, UDP, ICMP, IPv4, ARP, IGMP, PPPoE
-- Supports 8 independent sockets simultaneously
-- Supports Power down mode
-- Supports Wake on LAN over UDP
-- Supports High Speed Serial Peripheral Interface(SPI MODE 0, 3)
-- Internal 32Kbytes Memory for TX/RX Buffers
-- 10BaseT/100BaseTX Ethernet PHY embedded
-- Supports Auto Negotiation (Full and half duplex, 10 and 100\* based )
-- Not supports IP Fragmentation
-- 3.3V operation with 5V I/O signal tolerance
-- LED outputs (Full/Half duplex, Link, Speed, Active)
-- Micro-SD card socket
-- Grove connectors for I2C and UART
-
-## Hardware Overview
-
------------------
-
-
-**Hardware Configuration**
-
-1. RJ45: Ethernet Port;
-2. IC W5500: a hardwired TCP/IP Ethernet Controller;
-3. Reset Button: Reset Ethernet shield ;
-4. SD Card Socket: support Micro SD card in FAT16 or FAT32; maximum storage is 2GB.
-5. I2C Interface
-6. UART Interface
-
-**Pins usage on Arduino**
-
-1. D4: SD card chip Selection
-2. D10: W5200 Chip Selection
-3. D11: SPI MOSI
-4. D12: SPI MISO
-5. D13: SPI SCK
-
-:::note
-Both W5500 and SD card communicate with Arduino via SPI bus. Pin 10 and pin 4 are chip Selection pins for W5500 and SD slot. They cannot be used as general I/O.
-:::
-
-Usage
------
-
-We will show you an example.This example can upload data to webpage and store your sensor data to SD Card.
-
-### Hardware
-
-**Part List:**
-
-
-**Procedure:**
-
-1. Mount W5500 Ethernet Shield v1.0 on your Arduino, mount Base Shield V2 on Ethernet Shield, and connect Grove-Temp&Humi sensor to Base Shield D5 Grove port, attach the SD card.
-2. Connect the Ethernet shield to network with a standard Ethernet cable;
-3. Connect Arduino to PC via USB cable;
-
-
-
-### Software
-
-- Please follow [how to install an arduino library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library/) procedures to install library.
-- Click on below button to download W5500 Ethernet Shield libraries.
-
-
-
-- Install the library to your Arduino IDE when it is downloaded.
-- Copy below code into sketch and then upload:
-
-```cpp
-//This sketch uses W5500 Ethernet Shield,Seeeduino V4.2,Grove-Temp&Humi,
-//Base Shield V2 Sensor and Micro SD Card to design a temperature and humidity collection station.
-//attach the temperature and humidity sensor to base shield D5 grove port.
-//It publishes the temperature and humidity data to webpage
-//and refresh every 5 seconds, store the data into SD card datalog.txt file.
-
-#include
-#include
-#include
-#include
-dht11 DHT;
-#define DHT11_PIN 5
-const int chipSelect = 4;
-
-// Please update IP address according to your local network
-#if defined(WIZ550io_WITH_MACADDRESS) // Use assigned MAC address of WIZ550io
-;
-#else
-byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
-#endif
-IPAddress ip(192,168,0,177);
-
-// Initialize the Ethernet server library
-// with the IP address and port you want to use
-// (port 80 is default for HTTP):
-EthernetServer server(80);
-
-void setup() {
- // Open serial communications and wait for port to open:
- Serial.begin(9600);
- while (!Serial) {
- ; // wait for serial port to connect. Needed for Leonardo only
- }
-
- // start the Ethernet connection and the server:
-#if defined(WIZ550io_WITH_MACADDRESS)
- Ethernet.begin(ip);
-#else
- Ethernet.begin(mac, ip);
-#endif
- server.begin();
- Serial.print("server is at ");
- Serial.println(Ethernet.localIP());
-
- //initializing the SD card
- Serial.print("Initializing SD card...");
-
- // see if the card is present and can be initialized:
- if (!SD.begin(chipSelect)) {
- Serial.println("Card failed, or not present");
- // don't do anything more:
- return;
- }
- Serial.println("card initialized.");
-}
-
-
-void loop() {
- // listen for incoming clients
- EthernetClient client = server.available();
- if (client) {
- Serial.println("new client");
- // an http request ends with a blank line
- boolean currentLineIsBlank = true;
- while (client.connected()) {
- if (client.available()) {
- char c = client.read();
- Serial.write(c);
- // if you've gotten to the end of the line (received a newline
- // character) and the line is blank, the http request has ended,
- // so you can send a reply
- if (c == '\n' && currentLineIsBlank) {
- // send a standard http response header
- client.println("HTTP/1.1 200 OK");
- client.println("Content-Type: text/html");
- client.println("Connection: close"); // the connection will be closed after completion of the response
- client.println("Refresh: 5"); // refresh the page automatically every 5 sec
- client.println();
- client.println("");
- client.println("");
-
- // output the value of input pin on web
- int chk;
- chk = DHT.read(DHT11_PIN); // READ DATA
- client.print("Humidity: ");
- client.print(DHT.humidity);
- client.println(" ");
- client.print("Temperature: ");
- client.print(DHT.temperature);
-
- //write value of input pin into SD card
- // make a string for assembling the data to log:
- String dataString = "";
- // read the humidity and temperature and append to the string:
- dataString = String(DHT.humidity) + String(DHT.temperature);
- // open the file. note that only one file can be open at a time,
- // so you have to close this one before opening another.
- File dataFile = SD.open("datalog.txt", FILE_WRITE);
- // if the file is available, write to it:
- if (dataFile) {
- dataFile.println(dataString);
- dataFile.close();
- // print to the serial port too:
- Serial.println(dataString);
- }
- // if the file isn't open, pop up an error:
- else {
- Serial.println("error opening datalog.txt");
- }
- break;
- }
- if (c == '\n') {
- // you're starting a new line
- currentLineIsBlank = true;
- }
- else if (c != '\r') {
- // you've gotten a character on the current line
- currentLineIsBlank = false;
- }
- }
- }
- // give the web browser time to receive the data
- delay(1);
- // close the connection:
- client.stop();
- Serial.println("client disconnected");
- }
-}
-
-```
-
-### Results
-
-Now, we will show result.
-
-1. Put your SD card into the computer,you will see some temperature and humidity information.
-2. What's more, we can see information from web.
-
-
-
-Isn't it very easy? You can begin your project.
-
-## Schematic Online Viewer
-
-
-
-
-## Resources
-
-- [W5500 Ethernet Shield in Eagle format](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500_Ethernet_Shield_v1.0.zip)
-- [W5500 Ethernet Shield Schematic in PDF format](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500_Ethernet_Shield_v1.0.pdf)
-- [W5500 Ethernet Shield PCB in PDF format](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500%20Ethernet%20Shield%20v1.0%20PCB.pdf)
-- [W5500 Ethernet Shield Library](https://github.com/embeddist/WIZ_Ethernet_Library-IDE1.6.x)
-- [W5500 Ethernet Shield Datasheet.pdf](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500_datasheet_v1.0.2.pdf)
-
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+The W5500 Ethernet Shield v1.0 can provide your projects with internet connectivity. W5500 enables users to have the Internet connectivity in their applications by using the single chip, in which TCP/IP stack, 10 / 100 Ethernet MAC and PHY embedded. The shield also has two Grove connectors and a microSD card socket to support projects which require storing large amounts of data from Grove sensor. The RJ45 port (where the Ethernet cable is connected to) is low enough to allow you to stack more shields on top of this one if needed.
+
+
+
+## Features
+
+--------
+
+- Supports Hardwired TCP/IP Protocols : TCP, UDP, ICMP, IPv4, ARP, IGMP, PPPoE
+- Supports 8 independent sockets simultaneously
+- Supports Power down mode
+- Supports Wake on LAN over UDP
+- Supports High Speed Serial Peripheral Interface(SPI MODE 0, 3)
+- Internal 32Kbytes Memory for TX/RX Buffers
+- 10BaseT/100BaseTX Ethernet PHY embedded
+- Supports Auto Negotiation (Full and half duplex, 10 and 100\* based )
+- Not supports IP Fragmentation
+- 3.3V operation with 5V I/O signal tolerance
+- LED outputs (Full/Half duplex, Link, Speed, Active)
+- Micro-SD card socket
+- Grove connectors for I2C and UART
+
+## Hardware Overview
+
+-----------------
+
+
+**Hardware Configuration**
+
+1. RJ45: Ethernet Port;
+2. IC W5500: a hardwired TCP/IP Ethernet Controller;
+3. Reset Button: Reset Ethernet shield ;
+4. SD Card Socket: support Micro SD card in FAT16 or FAT32; maximum storage is 2GB.
+5. I2C Interface
+6. UART Interface
+
+**Pins usage on Arduino**
+
+1. D4: SD card chip Selection
+2. D10: W5200 Chip Selection
+3. D11: SPI MOSI
+4. D12: SPI MISO
+5. D13: SPI SCK
+
+:::note
+Both W5500 and SD card communicate with Arduino via SPI bus. Pin 10 and pin 4 are chip Selection pins for W5500 and SD slot. They cannot be used as general I/O.
+:::
+
+Usage
+-----
+
+We will show you an example.This example can upload data to webpage and store your sensor data to SD Card.
+
+### Hardware
+
+**Part List:**
+
+
+**Procedure:**
+
+1. Mount W5500 Ethernet Shield v1.0 on your Arduino, mount Base Shield V2 on Ethernet Shield, and connect Grove-Temp&Humi sensor to Base Shield D5 Grove port, attach the SD card.
+2. Connect the Ethernet shield to network with a standard Ethernet cable;
+3. Connect Arduino to PC via USB cable;
+
+
+
+### Software
+
+- Please follow [how to install an arduino library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library/) procedures to install library.
+- Click on below button to download W5500 Ethernet Shield libraries.
+
+
+
+- Install the library to your Arduino IDE when it is downloaded.
+- Copy below code into sketch and then upload:
+
+```cpp
+//This sketch uses W5500 Ethernet Shield,Seeeduino V4.2,Grove-Temp&Humi,
+//Base Shield V2 Sensor and Micro SD Card to design a temperature and humidity collection station.
+//attach the temperature and humidity sensor to base shield D5 grove port.
+//It publishes the temperature and humidity data to webpage
+//and refresh every 5 seconds, store the data into SD card datalog.txt file.
+
+#include
+#include
+#include
+#include
+dht11 DHT;
+#define DHT11_PIN 5
+const int chipSelect = 4;
+
+// Please update IP address according to your local network
+#if defined(WIZ550io_WITH_MACADDRESS) // Use assigned MAC address of WIZ550io
+;
+#else
+byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
+#endif
+IPAddress ip(192,168,0,177);
+
+// Initialize the Ethernet server library
+// with the IP address and port you want to use
+// (port 80 is default for HTTP):
+EthernetServer server(80);
+
+void setup() {
+ // Open serial communications and wait for port to open:
+ Serial.begin(9600);
+ while (!Serial) {
+ ; // wait for serial port to connect. Needed for Leonardo only
+ }
+
+ // start the Ethernet connection and the server:
+#if defined(WIZ550io_WITH_MACADDRESS)
+ Ethernet.begin(ip);
+#else
+ Ethernet.begin(mac, ip);
+#endif
+ server.begin();
+ Serial.print("server is at ");
+ Serial.println(Ethernet.localIP());
+
+ //initializing the SD card
+ Serial.print("Initializing SD card...");
+
+ // see if the card is present and can be initialized:
+ if (!SD.begin(chipSelect)) {
+ Serial.println("Card failed, or not present");
+ // don't do anything more:
+ return;
+ }
+ Serial.println("card initialized.");
+}
+
+
+void loop() {
+ // listen for incoming clients
+ EthernetClient client = server.available();
+ if (client) {
+ Serial.println("new client");
+ // an http request ends with a blank line
+ boolean currentLineIsBlank = true;
+ while (client.connected()) {
+ if (client.available()) {
+ char c = client.read();
+ Serial.write(c);
+ // if you've gotten to the end of the line (received a newline
+ // character) and the line is blank, the http request has ended,
+ // so you can send a reply
+ if (c == '\n' && currentLineIsBlank) {
+ // send a standard http response header
+ client.println("HTTP/1.1 200 OK");
+ client.println("Content-Type: text/html");
+ client.println("Connection: close"); // the connection will be closed after completion of the response
+ client.println("Refresh: 5"); // refresh the page automatically every 5 sec
+ client.println();
+ client.println("");
+ client.println("");
+
+ // output the value of input pin on web
+ int chk;
+ chk = DHT.read(DHT11_PIN); // READ DATA
+ client.print("Humidity: ");
+ client.print(DHT.humidity);
+ client.println(" ");
+ client.print("Temperature: ");
+ client.print(DHT.temperature);
+
+ //write value of input pin into SD card
+ // make a string for assembling the data to log:
+ String dataString = "";
+ // read the humidity and temperature and append to the string:
+ dataString = String(DHT.humidity) + String(DHT.temperature);
+ // open the file. note that only one file can be open at a time,
+ // so you have to close this one before opening another.
+ File dataFile = SD.open("datalog.txt", FILE_WRITE);
+ // if the file is available, write to it:
+ if (dataFile) {
+ dataFile.println(dataString);
+ dataFile.close();
+ // print to the serial port too:
+ Serial.println(dataString);
+ }
+ // if the file isn't open, pop up an error:
+ else {
+ Serial.println("error opening datalog.txt");
+ }
+ break;
+ }
+ if (c == '\n') {
+ // you're starting a new line
+ currentLineIsBlank = true;
+ }
+ else if (c != '\r') {
+ // you've gotten a character on the current line
+ currentLineIsBlank = false;
+ }
+ }
+ }
+ // give the web browser time to receive the data
+ delay(1);
+ // close the connection:
+ client.stop();
+ Serial.println("client disconnected");
+ }
+}
+
+```
+
+### Results
+
+Now, we will show result.
+
+1. Put your SD card into the computer,you will see some temperature and humidity information.
+2. What's more, we can see information from web.
+
+
+
+Isn't it very easy? You can begin your project.
+
+## Schematic Online Viewer
+
+
+
+
+## Resources
+
+- [W5500 Ethernet Shield in Eagle format](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500_Ethernet_Shield_v1.0.zip)
+- [W5500 Ethernet Shield Schematic in PDF format](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500_Ethernet_Shield_v1.0.pdf)
+- [W5500 Ethernet Shield PCB in PDF format](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500%20Ethernet%20Shield%20v1.0%20PCB.pdf)
+- [W5500 Ethernet Shield Library](https://github.com/embeddist/WIZ_Ethernet_Library-IDE1.6.x)
+- [W5500 Ethernet Shield Datasheet.pdf](https://files.seeedstudio.com/wiki/W5500_Ethernet_Shield_v1.0/res/W5500_datasheet_v1.0.2.pdf)
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
-
-WireLess Gate Shield is an Arduino-compatible expansion card designed to build a system of receiving / transmitting and broadcasting various wireless commands and data. For maximum coverage possible wireless communication interfaces on the board has an IR receiver interface for connecting popular transceiver nRF24L01 + and RFM69HW. Additionally, the board has a real time clock module DS1307.
-
-
-
-
-
-## Features
-
----
-
-* Interface to connect the transceiver 315/433/868/915 MHz (depending on the version) [RFM69HW](http://devicter.ru/goods/RFM69HW-RF-transceiver)
-
-* Interface to connect the transceiver at 2.4 GHz [nRF24L01 +](https://www.seeedstudio.com/depot/s/nRF24L01.html?search_in_description=0)
-
-* IR receiver
-* Real-time clock module based on DS1307 with battery backup
-* LED automatic activity radio modules
-* LED for user
-* Clock button to operate
-* [GROVE](https://www.seeedstudio.com/depot/Grove-t-3.html?ref=top)-compatible connector: I2C
-* Fully compatible with [Ethernet Shield](https://www.seeedstudio.com/depot/W5200-Ethernet-Shield-p-1577.html)
-
-## Layout and schematics
-
----
-
-
-On the left side WireLess Gate Shield are interfaces to wireless modules:
-
-* nRF24l01 +, including the enhanced ("PA") version (above)
-* RFM69HW (bottom).
-
-Between wireless modules is U.FL connector for external antenna for RFM69HW. If you plan to use the regular antenna (bit of wire required length) - it is possible to solder directly to the board Schild (near the connector U.FL)
-
-To the right and slightly above the module is RFM69HW LED LED1 "RF433"
-
-In the central part of the board is a slot for a backup battery for clock module DS1307
-
-To the right and slightly below the slot for the battery - I2C-connector.
-
-On the right side is (top-down):
-
-* LED LED2 "RF24"
-* IR receiver
-* LED LED3 - user
-* Clock button S1
-
-
-
-## Basic functionality
-
----
-In the basic version (without the use of Ethernet Shield) may organize a wireless gateway between the radios and the IR receiver.
-
-Command (or data) can be broadcast between all three wireless interfaces according to the logic of that program the user.
-
-Availability of real-time clock module will automate the sending of any data or commands with reference to the date / time.
-
-Device Management can be organized using a button located on the Shield.
-
-## Expansion Capabilities
-
----
-Additionally WireLess Gate Shield can connect any i2c device using Grove-compatible connections (sensors, displays, etc.).
-
-WireLess Gate Shield was designed to be fully compatible with [Ethernet Shield](https://www.seeedstudio.com/depot/W5200-Ethernet-Shield-p-1577.html) - so you can use these two together Schild to create even more advanced wireless control device (logging on SD-card and presenting data on a web page, manage wireless devices via the web).
-
-## Interfaces
-
----
-
-* Interface for RF-module nRF24L01 +:
- * D11 - MOSI
-
- * D12 - MISO
- * D13 - SCK
-
- * D7 - RF24_CE
-
- * D8 - RF24_CSN
-
- * D2 - RF24_IRQ
-
-* Interface for RF-module RFM69HW:
- * D11 - MOSI
-
- * D12 - MISO
- * D13 - SCK
-
- * D9 - RF433_NSS
-
- * A0 - RF433_RESET
-
- * D3 - RF433_IRQ
-
-* A4 (SDA), A5 (SCL) - displayed on the connector "I2C" (the other two pins in the connector - VCC and GND for sensor supply)
-* A4 (SDA), A5 (SCL) - are involved in parallel for RTC DS1307
-* A1 - Button
-* D6 - Custom LED (LED3)
-
-## Features WireLess Gate Shield
-
----
-
-### Wireless Modules
-
-Both wireless module RFM69HW and nRF24l01 + connected hardware bus SPI.
-
-Selection of a particular wireless module is a low potential for the establishment of the appropriate chip select pin:
-
-* CSN (D8) for the module nRF24l01 +
-* NSS (D9) for the module RFM69HW
-
-_'Warning', 'If you have installed, but the software is not involved RFM69HW, be sure to install NSS pin of this module in state HIGH (otherwise it will interfere with the normal operation nRF24l01 + and Ethernet Shield._
-
-### Automatic display of the wireless modules
-
-LED indication of the wireless module is implemented as follows:
-
-* LED cathode LED1 "RF24" connected to pin CSN (D8) module nRF24l01 +, the anode of the LED (through a current limiting resistor) - to pin SCK bus SPI (D13)
-* LED cathode LED2 "RF433" connected to pin NSS (D9) module RFM69HW, the anode of the LED (through a current limiting resistor) - to pin SCK bus SPI (D13)
-
-When radios are not active - at the appropriate pines chip select (CSN and NSS) there is a high potential, with the appearance of the clock at pin SCK does not lead to the ignition of the LEDs.
-If the same MK "communicates" with any wireless module to select it at the appropriate Pina (CSN and NSS) is set low potential and at the same timing pulses at pin SCK "ignite" the corresponding LED.
-
-Thus, the user is not required to arrange for any additional programming work on the MC to indicate operation of the module.
-
-### Features
-
-If necessary, SMD-LED to replace the usual outs (eg to embed the finished device in a cute case with display):
-
-* The board is close to the equipment corresponding LED is seating where you can solder terminals LEDs (or the appropriate cable).
-* Current-limiting resistor is on the board (for the output of the LED series resistor is not required)
-* SMD-LED when setting the output of the LED must be removed from the board
-
-### Modification to control via IR
-
-Custom LED can be replaced by LED3 pin IR LED and thereby further expand the use of WireLess Gate Shield (for example, a command sent via any wireless interface or LAN - control devices using infrared commands).
-
-## Libraries
-
-### Required Library
-
-To use the WireLess Gate Shield requires the following libraries:
-
-* Work with the transceiver nRF24L01 + - [RF24](https://github.com/maniacbug/RF24/archive/master.zip)
-
-* Work with the transceiver RFM69HW - [RFM69](https://github.com/LowPowerLab/RFM69/archive/master.zip)
-
-* Real-time clock (RTC) - [RTClib](https://github.com/adafruit/RTClib/archive/master.zip)
-
-* IR-receiver - [IRremote](https://github.com/shirriff/Arduino-IRremote/archive/master.zip)
-
-Additionally required libraries that are used when working RF24 and LCD-display:
-
-* SPI
-
-Libraries are examples of them just to understand how they work.
-
-### Features use libraries
-
-**NRF24l01 +**
-
-Module Initialization nRF24l01 + as follows:
-
-```cpp
-//RF24 radio(CE,CSN);
-RF24 radio(7,8);
-```
-
-**RFM69HW**
-
-To work with a wireless module RFM69HW need to make minor corrections to the file RFM69.h follows:
-
-At the beginning of the file to find the line:
-
-```cpp
-#define SPI_CS SS // SS is the SPI slave select pin, for instance D10 on atmega328
-#define RF69_IRQ_PIN 2 // INT0 on AVRs should be connected to DIO0 (ex on Atmega328 it's D2)
-```
-
-And replace them with:
-
-```cpp
-//#define SPI_CS SS // SS is the SPI slave select pin, for instance D10 on atmega328
-//#define RF69_IRQ_PIN 2 // INT0 on AVRs should be connected to DIO0 (ex on Atmega328 it's D2)
-#define SPI_CS 9 // SS is the SPI slave select pin, for WireLess Gate Shield - D9
-#define RF69_IRQ_PIN 3 // INT1 on AVRs should be connected to DIO0 (ex on Atmega328 it's D3)
-```
-
-Additionally, the file RFM69.cpp need to find the line:
-
-```cpp
-void RFM69::isr0() { selfPointer->interruptHandler(); }
-```
-
-And replace them with:
-
-```cpp
-//void RFM69::isr0() { selfPointer->interruptHandler(); }
-void RFM69::isr1() { selfPointer->interruptHandler(); }
-```
-
-Module Initialization RFM69HW as follows:
-
-```cpp
- resetRFM69();
- radio.setCS(9); // NSS - D9
- radio.initialize(FREQUENCY,NODEID,NETWORKID);
-```
-
-_'Note:'_ Working with RFM69HW determined by the state of its registers. For more tinctures for specific endpoints required by the rules in the file RFM69.cpp function RFM69 :: initialize
-To better understand the purpose registers read the file RFM69registers.h (also included in the library), and documentation [radio RFM69HW](http://st.devicter.ru/9/1115/243/RFM69HW.pdf)
-
-## Demonstration
-
-### Code for the main unit with WireLess Gate Shield (works with RTC, IR, RFM69HW, nRF24l01 +)
-
-* Sends a structure to another RFM69HW and receives a response (ping-pong).
-* Listen nRF24l01 + comes and if appropriate package - outputs it to monitor
-* Accepts commands via IR receiver (the recognized commands are displayed in the monitor) and lights custom LED
-
-All results are displayed in the Serial Monitor
-
-```cpp
-#include
-#include
-#include "RF24.h"
-#include
-#include
-#include "RTClib.h"
-
-RF24 radio24(7,8);
-
-RTC_DS1307 RTC;
-
-int RECV_PIN = 5;
-
-IRrecv irrecv(RECV_PIN);
-
-decode_results results;
-
-// create a framework for the transmission of values
-typedef struct{
- int SensorID; // ID sensor
- int CommandTo; // command module number ...
- int Command; // command
- // 0 - answer
- // 1 - get the value
- // 2 - set the value
- int ParamID; // parameter identifier
- float ParamValue; // value
- boolean Status; // status
- // 0 - read-only (RO)
- // 1 - can change the (RW)
- char Comment[16]; // comment
-}
-Message;
-
-Message sensor;
-
-const uint64_t pipes[2] = {
-0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
-
-volatile boolean waitRF24 = false;
-
-#define NODEID 99
-#define NETWORKID 100
-#define GATEWAYID 1
-#define FREQUENCY RF69_433MHZ //Match this with the version of your Moteino! (others: RF69_433MHZ, RF69_868MHZ)
-#define KEY "thisIsEncryptKey" //has to be same 16 characters/bytes on all nodes, not more not less!
-#define LED 6
-#define SERIAL_BAUD 115200
-#define ACK_TIME 30 // # of ms to wait for an ack
-
-#define RFM69_RESET 14 //A0
-#define RFM69_NSS 9
-#define RFM69_DIO0 3
-
-#define BUTTON 15 // A1
-
-#define MOSI 11
-#define MISO 12
-#define SCK 13
-
-int TRANSMITPERIOD = 500; //transmit a packet to gateway so often (in ms)
-byte sendSize=0;
-boolean requestACK = false;
-RFM69 radio;
-
-int delta=2000;
-
-unsigned long blinkStop;
-unsigned long timeReady;
-
-typedef struct {
- int nodeId; //store this nodeId
- unsigned long uptime; //uptime in ms
- float temp; //temperature maybe?
-}
-Payload;
-Payload theData;
-
-void setup() {
- Serial.begin(SERIAL_BAUD);
-
- pinMode(LED, OUTPUT);
-
- pinMode(RFM69_NSS, OUTPUT);
- pinMode(7, OUTPUT);
- pinMode(8, OUTPUT);
- pinMode(MOSI, OUTPUT);
- pinMode(MISO, INPUT);
- pinMode(SCK, OUTPUT);
-
- pinMode(RFM69_RESET, OUTPUT);
- pinMode(RFM69_DIO0, INPUT);
-
- pinMode(BUTTON, INPUT);
-
- digitalWrite(RFM69_NSS, HIGH);
- digitalWrite(7, HIGH);
-
- resetRFM69();
- radio.setCS(RFM69_NSS);
- radio.initialize(FREQUENCY,NODEID,NETWORKID);
-
- //radio.setHighPower(); //uncomment only for RFM69HW!
-
- radio.encrypt(KEY);
- char buff[50];
- sprintf(buff, "\nTransmitting at %d Mhz...", FREQUENCY==RF69_433MHZ ? 433 : FREQUENCY==RF69_868MHZ ? 868 : 915);
- Serial.println(buff);
-
- radio24.begin();
- // optionally, increase the delay between retries & # of retries
- radio24.setRetries(15,15);
- radio24.setChannel(119);
- // по умолчанию СЛУШАЕМ
- radio24.openWritingPipe(pipes[1]);
- radio24.openReadingPipe(1,pipes[0]);
- radio24.startListening();
-
- delay(20);
-
- attachInterrupt(0, isr_RF24, FALLING);
-
- irrecv.enableIRIn();
-
- Wire.begin();
- RTC.begin();
-
- if (! RTC.isrunning()) {
- Serial.println("RTC is NOT running!");
- // following line sets the RTC to the date & time this sketch was compiled
- RTC.adjust(DateTime(__DATE__, __TIME__));
- }
-}
-
-long lastPeriod = -1;
-void loop() {
-
- //check for any received packets
- if (radio.receiveDone())
- {
- Serial.print('[');
- Serial.print(radio.SENDERID, DEC);
- Serial.print("] ");
- for (byte i = 0; i < radio.DATALEN; i++)
- Serial.print((char)radio.DATA[i]);
- Serial.print(" [RX_RSSI:");
- Serial.print(radio.readRSSI());
- Serial.print("]");
-
- if (radio.ACK_REQUESTED)
- {
- radio.sendACK();
- Serial.print(" - ACK sent");
- delay(10);
- }
- Serial.println();
- }
-
- int currPeriod = millis()/TRANSMITPERIOD;
- if (currPeriod != lastPeriod)
- {
- //fill in the struct with new values
- theData.nodeId = NODEID;
- theData.uptime = millis();
- theData.temp = radio.readTemperature();//91.23; //it's hot!
-
- Serial.print("Sending struct (");
- Serial.print(sizeof(theData));
- Serial.print(" bytes) ... ");
- if (radio.sendWithRetry(GATEWAYID, (const void*)(&theData), sizeof(theData)))
- Serial.print(" ok!");
- else Serial.print(" nothing...");
- Serial.println();
- lastPeriod=currPeriod;
- }
-
- listenRF24();
-
- if (irrecv.decode(&results)) {
- Serial.println(results.value, HEX);
- irrecv.resume(); // Receive the next value
- blinkStop=millis()+100;
- digitalWrite(LED, HIGH);
- }
-
- if (digitalRead(BUTTON)==LOW) {
- blinkStop=millis()+1000;
- digitalWrite(LED, HIGH);
- }
-
- if (millis()>blinkStop) {
- digitalWrite(LED, LOW);
- }
-
- if(millis()>timeReady){
- timeReady=millis()+2000;
- DateTime now = RTC.now();
-
- Serial.print(now.year(), DEC);
- Serial.print('/');
- Serial.print(now.month(), DEC);
- Serial.print('/');
- Serial.print(now.day(), DEC);
- Serial.print(' ');
- Serial.print(now.hour(), DEC);
- Serial.print(':');
- Serial.print(now.minute(), DEC);
- Serial.print(':');
- Serial.print(now.second(), DEC);
- Serial.println();
- }
-}
-
-void Blink(byte PIN, int DELAY_MS)
-{
- pinMode(PIN, OUTPUT);
- digitalWrite(PIN,HIGH);
- delay(DELAY_MS);
- digitalWrite(PIN,LOW);
-}
-
-void resetRFM69(){
- digitalWrite(RFM69_RESET, HIGH);
- delay(1);
- digitalWrite(RFM69_RESET, LOW);
- delay(10);
-}
-
-void isr_RF24(){
- waitRF24 = true;
-}
-
-void listenRF24() {
- if (waitRF24) {
- waitRF24 = false;
- if ( radio24.available() )
- {
- bool done = false;
- while (!done)
- {
- done = radio24.read( &sensor, sizeof(sensor) );
- if(sensor.Command == 0) {
- Serial.print(sensor.SensorID);
- Serial.print(" ");
- Serial.print(sensor.ParamID);
- Serial.print(" ");
- Serial.print(sensor.ParamValue);
- Serial.print(" ");
- Serial.println(sensor.Comment);
- }
- }
- }
- }
-}
-```
-
-### Code for "receiver" (for the test used Arduino Nano and RFM69HW module on the breadboard)
-
-* Takes using RFM69HW structure
-* Accountable for admission
-* Prints additional information regarding the module RFM69HW (registers, etc.)
-
-```cpp
-#include
-#include
-
-#define NODEID 1
-#define NETWORKID 100
-#define FREQUENCY RF69_433MHZ //Match this with the version of your Moteino! (others: RF69_433MHZ, RF69_868MHZ)
-#define KEY "thisIsEncryptKey" //has to be same 16 characters/bytes on all nodes, not more not less!
-#define LED 6
-#define SERIAL_BAUD 115200
-#define ACK_TIME 30 // # of ms to wait for an ack
-
-#define RFM69_RESET 14
-
-RFM69 radio;
-bool promiscuousMode = false; //set to 'true' to sniff all packets on the same network
-
-typedef struct {
- int nodeId; //store this nodeId
- unsigned long uptime; //uptime in ms
- float temp; //temperature maybe?
-} Payload;
-Payload theData;
-
-void setup() {
- Serial.begin(SERIAL_BAUD);
- pinMode(RFM69_RESET, OUTPUT);
- pinMode(3, INPUT);
- resetRFM69();
- radio.setCS(9);
- //delay(10);
- radio.initialize(FREQUENCY,NODEID,NETWORKID);
-
- //radio.setHighPower(); //uncomment only for RFM69HW!
-
- radio.encrypt(KEY);
- radio.promiscuous(promiscuousMode);
- char buff[50];
- sprintf(buff, "\nListening at %d Mhz...", FREQUENCY==RF69_433MHZ ? 433 : FREQUENCY==RF69_868MHZ ? 868 : 915);
- Serial.println(buff);
-}
-
-byte ackCount=0;
-void loop() {
- //process any serial input
- if (Serial.available() > 0)
- {
- char input = Serial.read();
- if (input == 'r') //d=dump all register values
- radio.readAllRegs();
- if (input == 'E') //E=enable encryption
- radio.encrypt(KEY);
- if (input == 'e') //e=disable encryption
- radio.encrypt(null);
- if (input == 'p')
- {
- promiscuousMode = !promiscuousMode;
- radio.promiscuous(promiscuousMode);
- Serial.print("Promiscuous mode ");Serial.println(promiscuousMode ? "on" : "off");
- }
-
- if (input == 'd') //d=dump flash area
- {
- Serial.println("Flash content:");
- int counter = 0;
-
- while(counter<=256){
- //Serial.print(flash.readByte(counter++), HEX);
- Serial.print('.');
- }
- //while(flash.busy());
- Serial.println();
- }
- if (input == 'D')
- {
- Serial.print("Deleting Flash chip content... ");
- //flash.chipErase();
- //while(flash.busy());
- Serial.println("DONE");
- }
- if (input == 'i')
- {
- Serial.print("DeviceID: ");
- //word jedecid = flash.readDeviceId();
- //Serial.println(jedecid, HEX);
- }
- }
-
- if (radio.receiveDone())
- {
- Serial.print('[');Serial.print(radio.SENDERID, DEC);Serial.print("] ");
- Serial.print(" [RX_RSSI:");Serial.print(radio.readRSSI());Serial.print("]");
- if (promiscuousMode)
- {
- Serial.print("to [");Serial.print(radio.TARGETID, DEC);Serial.print("] ");
- }
-
- if (radio.DATALEN != sizeof(Payload))
- Serial.print("Invalid payload received, not matching Payload struct!");
- else
- {
- theData = *(Payload*)radio.DATA; //assume radio.DATA actually contains our struct and not something else
- Serial.print(" nodeId=");
- Serial.print(theData.nodeId);
- Serial.print(" uptime=");
- Serial.print(theData.uptime);
- Serial.print(" temp=");
- Serial.print(theData.temp);
- }
-
- if (radio.ACK_REQUESTED)
- {
- byte theNodeID = radio.SENDERID;
- radio.sendACK();
- Serial.print(" - ACK sent.");
-
- // When a node requests an ACK, respond to the ACK
- // and also send a packet requesting an ACK (every 3rd one only)
- // This way both TX/RX NODE functions are tested on 1 end at the GATEWAY
- if (ackCount++%3==0)
- {
- Serial.print(" Pinging node ");
- Serial.print(theNodeID);
- Serial.print(" - ACK...");
- delay(3); //need this when sending right after reception .. ?
- if (radio.sendWithRetry(theNodeID, "ACK TEST", 8, 0)) // 0 = only 1 attempt, no retries
- Serial.print("ok!");
- else Serial.print("nothing");
- }
- }
- Serial.println();
- Blink(LED,3);
- }
-}
-
-void Blink(byte PIN, int DELAY_MS)
-{
- pinMode(PIN, OUTPUT);
- digitalWrite(PIN,HIGH);
- delay(DELAY_MS);
- digitalWrite(PIN,LOW);
-}
-
-void resetRFM69(){
- digitalWrite(RFM69_RESET, HIGH);
- delay(1);
- digitalWrite(RFM69_RESET, LOW);
- delay(10);
-}
-```
-
-## Product versions
-
-
-
-
-
Revision
-
Description
-
Release
-
-
-
0.9
-
Prototype
-
05.05.2014
-
-
-
1.0
-
Public version
-
05.07.2014
-
-
-
-
-## Applications
-
-* Universal Wireless Gateway RF2.4 GHz (nRF24l01 +), RF433 MHz (RFM69HW), IR and LAN (using Ethernet Shield)
-* Logging system commands and data wireless devices with the time (using the Ethernet Shield)
-* Design and construction of administering various wireless commands at a certain time (for example, "turn on the light August 23, 2014 at 18:02" or "every day to include an automatic watering at 5:00")
-
-## Questions and Answers
-
-* Blog WireLess Gate Shield RU
-
-* Ask a question by e-mail support@devicter.ru
-
-## How to buy
-
-This product can be purchased:
-
-China (shipping worldwide)
-
-[Elecrow store](http://www.elecrow.com/wireless-gate-shield-p-1139.html)
-
-[Seeed store](https://www.seeedstudio.com/depot/wireless-gate-shield.html)
-
-Russia
-
-[Devicter store](http://devicter.ru/goods/WireLess-Gate-Shield)
-
-## Links
-
-* [Description RFM69HW](http://st.devicter.ru/9/1115/243/RFM69HW.pdf)
-
-* [Description nRF24l01+](ftp://imall.iteadstudio.com/Modules/IM120606002_nRF24L01_module/DS_nRF24L01.pdf)
-
-* [schematic of the device](http://wiki.devicter.ru/images/c/c7/Wl-Scheme.PNG)
-
-## Tech Support & Product Discussion
-
-Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
-
-
+
+WireLess Gate Shield is an Arduino-compatible expansion card designed to build a system of receiving / transmitting and broadcasting various wireless commands and data. For maximum coverage possible wireless communication interfaces on the board has an IR receiver interface for connecting popular transceiver nRF24L01 + and RFM69HW. Additionally, the board has a real time clock module DS1307.
+
+
+
+
+
+## Features
+
+---
+
+* Interface to connect the transceiver 315/433/868/915 MHz (depending on the version) [RFM69HW](http://devicter.ru/goods/RFM69HW-RF-transceiver)
+
+* Interface to connect the transceiver at 2.4 GHz [nRF24L01 +](https://www.seeedstudio.com/depot/s/nRF24L01.html?search_in_description=0)
+
+* IR receiver
+* Real-time clock module based on DS1307 with battery backup
+* LED automatic activity radio modules
+* LED for user
+* Clock button to operate
+* [GROVE](https://www.seeedstudio.com/depot/Grove-t-3.html?ref=top)-compatible connector: I2C
+* Fully compatible with [Ethernet Shield](https://www.seeedstudio.com/depot/W5200-Ethernet-Shield-p-1577.html)
+
+## Layout and schematics
+
+---
+
+
+On the left side WireLess Gate Shield are interfaces to wireless modules:
+
+* nRF24l01 +, including the enhanced ("PA") version (above)
+* RFM69HW (bottom).
+
+Between wireless modules is U.FL connector for external antenna for RFM69HW. If you plan to use the regular antenna (bit of wire required length) - it is possible to solder directly to the board Schild (near the connector U.FL)
+
+To the right and slightly above the module is RFM69HW LED LED1 "RF433"
+
+In the central part of the board is a slot for a backup battery for clock module DS1307
+
+To the right and slightly below the slot for the battery - I2C-connector.
+
+On the right side is (top-down):
+
+* LED LED2 "RF24"
+* IR receiver
+* LED LED3 - user
+* Clock button S1
+
+
+
+## Basic functionality
+
+---
+In the basic version (without the use of Ethernet Shield) may organize a wireless gateway between the radios and the IR receiver.
+
+Command (or data) can be broadcast between all three wireless interfaces according to the logic of that program the user.
+
+Availability of real-time clock module will automate the sending of any data or commands with reference to the date / time.
+
+Device Management can be organized using a button located on the Shield.
+
+## Expansion Capabilities
+
+---
+Additionally WireLess Gate Shield can connect any i2c device using Grove-compatible connections (sensors, displays, etc.).
+
+WireLess Gate Shield was designed to be fully compatible with [Ethernet Shield](https://www.seeedstudio.com/depot/W5200-Ethernet-Shield-p-1577.html) - so you can use these two together Schild to create even more advanced wireless control device (logging on SD-card and presenting data on a web page, manage wireless devices via the web).
+
+## Interfaces
+
+---
+
+* Interface for RF-module nRF24L01 +:
+ * D11 - MOSI
+
+ * D12 - MISO
+ * D13 - SCK
+
+ * D7 - RF24_CE
+
+ * D8 - RF24_CSN
+
+ * D2 - RF24_IRQ
+
+* Interface for RF-module RFM69HW:
+ * D11 - MOSI
+
+ * D12 - MISO
+ * D13 - SCK
+
+ * D9 - RF433_NSS
+
+ * A0 - RF433_RESET
+
+ * D3 - RF433_IRQ
+
+* A4 (SDA), A5 (SCL) - displayed on the connector "I2C" (the other two pins in the connector - VCC and GND for sensor supply)
+* A4 (SDA), A5 (SCL) - are involved in parallel for RTC DS1307
+* A1 - Button
+* D6 - Custom LED (LED3)
+
+## Features WireLess Gate Shield
+
+---
+
+### Wireless Modules
+
+Both wireless module RFM69HW and nRF24l01 + connected hardware bus SPI.
+
+Selection of a particular wireless module is a low potential for the establishment of the appropriate chip select pin:
+
+* CSN (D8) for the module nRF24l01 +
+* NSS (D9) for the module RFM69HW
+
+_'Warning', 'If you have installed, but the software is not involved RFM69HW, be sure to install NSS pin of this module in state HIGH (otherwise it will interfere with the normal operation nRF24l01 + and Ethernet Shield._
+
+### Automatic display of the wireless modules
+
+LED indication of the wireless module is implemented as follows:
+
+* LED cathode LED1 "RF24" connected to pin CSN (D8) module nRF24l01 +, the anode of the LED (through a current limiting resistor) - to pin SCK bus SPI (D13)
+* LED cathode LED2 "RF433" connected to pin NSS (D9) module RFM69HW, the anode of the LED (through a current limiting resistor) - to pin SCK bus SPI (D13)
+
+When radios are not active - at the appropriate pines chip select (CSN and NSS) there is a high potential, with the appearance of the clock at pin SCK does not lead to the ignition of the LEDs.
+If the same MK "communicates" with any wireless module to select it at the appropriate Pina (CSN and NSS) is set low potential and at the same timing pulses at pin SCK "ignite" the corresponding LED.
+
+Thus, the user is not required to arrange for any additional programming work on the MC to indicate operation of the module.
+
+### Features
+
+If necessary, SMD-LED to replace the usual outs (eg to embed the finished device in a cute case with display):
+
+* The board is close to the equipment corresponding LED is seating where you can solder terminals LEDs (or the appropriate cable).
+* Current-limiting resistor is on the board (for the output of the LED series resistor is not required)
+* SMD-LED when setting the output of the LED must be removed from the board
+
+### Modification to control via IR
+
+Custom LED can be replaced by LED3 pin IR LED and thereby further expand the use of WireLess Gate Shield (for example, a command sent via any wireless interface or LAN - control devices using infrared commands).
+
+## Libraries
+
+### Required Library
+
+To use the WireLess Gate Shield requires the following libraries:
+
+* Work with the transceiver nRF24L01 + - [RF24](https://github.com/maniacbug/RF24/archive/master.zip)
+
+* Work with the transceiver RFM69HW - [RFM69](https://github.com/LowPowerLab/RFM69/archive/master.zip)
+
+* Real-time clock (RTC) - [RTClib](https://github.com/adafruit/RTClib/archive/master.zip)
+
+* IR-receiver - [IRremote](https://github.com/shirriff/Arduino-IRremote/archive/master.zip)
+
+Additionally required libraries that are used when working RF24 and LCD-display:
+
+* SPI
+
+Libraries are examples of them just to understand how they work.
+
+### Features use libraries
+
+**NRF24l01 +**
+
+Module Initialization nRF24l01 + as follows:
+
+```cpp
+//RF24 radio(CE,CSN);
+RF24 radio(7,8);
+```
+
+**RFM69HW**
+
+To work with a wireless module RFM69HW need to make minor corrections to the file RFM69.h follows:
+
+At the beginning of the file to find the line:
+
+```cpp
+#define SPI_CS SS // SS is the SPI slave select pin, for instance D10 on atmega328
+#define RF69_IRQ_PIN 2 // INT0 on AVRs should be connected to DIO0 (ex on Atmega328 it's D2)
+```
+
+And replace them with:
+
+```cpp
+//#define SPI_CS SS // SS is the SPI slave select pin, for instance D10 on atmega328
+//#define RF69_IRQ_PIN 2 // INT0 on AVRs should be connected to DIO0 (ex on Atmega328 it's D2)
+#define SPI_CS 9 // SS is the SPI slave select pin, for WireLess Gate Shield - D9
+#define RF69_IRQ_PIN 3 // INT1 on AVRs should be connected to DIO0 (ex on Atmega328 it's D3)
+```
+
+Additionally, the file RFM69.cpp need to find the line:
+
+```cpp
+void RFM69::isr0() { selfPointer->interruptHandler(); }
+```
+
+And replace them with:
+
+```cpp
+//void RFM69::isr0() { selfPointer->interruptHandler(); }
+void RFM69::isr1() { selfPointer->interruptHandler(); }
+```
+
+Module Initialization RFM69HW as follows:
+
+```cpp
+ resetRFM69();
+ radio.setCS(9); // NSS - D9
+ radio.initialize(FREQUENCY,NODEID,NETWORKID);
+```
+
+_'Note:'_ Working with RFM69HW determined by the state of its registers. For more tinctures for specific endpoints required by the rules in the file RFM69.cpp function RFM69 :: initialize
+To better understand the purpose registers read the file RFM69registers.h (also included in the library), and documentation [radio RFM69HW](http://st.devicter.ru/9/1115/243/RFM69HW.pdf)
+
+## Demonstration
+
+### Code for the main unit with WireLess Gate Shield (works with RTC, IR, RFM69HW, nRF24l01 +)
+
+* Sends a structure to another RFM69HW and receives a response (ping-pong).
+* Listen nRF24l01 + comes and if appropriate package - outputs it to monitor
+* Accepts commands via IR receiver (the recognized commands are displayed in the monitor) and lights custom LED
+
+All results are displayed in the Serial Monitor
+
+```cpp
+#include
+#include
+#include "RF24.h"
+#include
+#include
+#include "RTClib.h"
+
+RF24 radio24(7,8);
+
+RTC_DS1307 RTC;
+
+int RECV_PIN = 5;
+
+IRrecv irrecv(RECV_PIN);
+
+decode_results results;
+
+// create a framework for the transmission of values
+typedef struct{
+ int SensorID; // ID sensor
+ int CommandTo; // command module number ...
+ int Command; // command
+ // 0 - answer
+ // 1 - get the value
+ // 2 - set the value
+ int ParamID; // parameter identifier
+ float ParamValue; // value
+ boolean Status; // status
+ // 0 - read-only (RO)
+ // 1 - can change the (RW)
+ char Comment[16]; // comment
+}
+Message;
+
+Message sensor;
+
+const uint64_t pipes[2] = {
+0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
+
+volatile boolean waitRF24 = false;
+
+#define NODEID 99
+#define NETWORKID 100
+#define GATEWAYID 1
+#define FREQUENCY RF69_433MHZ //Match this with the version of your Moteino! (others: RF69_433MHZ, RF69_868MHZ)
+#define KEY "thisIsEncryptKey" //has to be same 16 characters/bytes on all nodes, not more not less!
+#define LED 6
+#define SERIAL_BAUD 115200
+#define ACK_TIME 30 // # of ms to wait for an ack
+
+#define RFM69_RESET 14 //A0
+#define RFM69_NSS 9
+#define RFM69_DIO0 3
+
+#define BUTTON 15 // A1
+
+#define MOSI 11
+#define MISO 12
+#define SCK 13
+
+int TRANSMITPERIOD = 500; //transmit a packet to gateway so often (in ms)
+byte sendSize=0;
+boolean requestACK = false;
+RFM69 radio;
+
+int delta=2000;
+
+unsigned long blinkStop;
+unsigned long timeReady;
+
+typedef struct {
+ int nodeId; //store this nodeId
+ unsigned long uptime; //uptime in ms
+ float temp; //temperature maybe?
+}
+Payload;
+Payload theData;
+
+void setup() {
+ Serial.begin(SERIAL_BAUD);
+
+ pinMode(LED, OUTPUT);
+
+ pinMode(RFM69_NSS, OUTPUT);
+ pinMode(7, OUTPUT);
+ pinMode(8, OUTPUT);
+ pinMode(MOSI, OUTPUT);
+ pinMode(MISO, INPUT);
+ pinMode(SCK, OUTPUT);
+
+ pinMode(RFM69_RESET, OUTPUT);
+ pinMode(RFM69_DIO0, INPUT);
+
+ pinMode(BUTTON, INPUT);
+
+ digitalWrite(RFM69_NSS, HIGH);
+ digitalWrite(7, HIGH);
+
+ resetRFM69();
+ radio.setCS(RFM69_NSS);
+ radio.initialize(FREQUENCY,NODEID,NETWORKID);
+
+ //radio.setHighPower(); //uncomment only for RFM69HW!
+
+ radio.encrypt(KEY);
+ char buff[50];
+ sprintf(buff, "\nTransmitting at %d Mhz...", FREQUENCY==RF69_433MHZ ? 433 : FREQUENCY==RF69_868MHZ ? 868 : 915);
+ Serial.println(buff);
+
+ radio24.begin();
+ // optionally, increase the delay between retries & # of retries
+ radio24.setRetries(15,15);
+ radio24.setChannel(119);
+ // по умолчанию СЛУШАЕМ
+ radio24.openWritingPipe(pipes[1]);
+ radio24.openReadingPipe(1,pipes[0]);
+ radio24.startListening();
+
+ delay(20);
+
+ attachInterrupt(0, isr_RF24, FALLING);
+
+ irrecv.enableIRIn();
+
+ Wire.begin();
+ RTC.begin();
+
+ if (! RTC.isrunning()) {
+ Serial.println("RTC is NOT running!");
+ // following line sets the RTC to the date & time this sketch was compiled
+ RTC.adjust(DateTime(__DATE__, __TIME__));
+ }
+}
+
+long lastPeriod = -1;
+void loop() {
+
+ //check for any received packets
+ if (radio.receiveDone())
+ {
+ Serial.print('[');
+ Serial.print(radio.SENDERID, DEC);
+ Serial.print("] ");
+ for (byte i = 0; i < radio.DATALEN; i++)
+ Serial.print((char)radio.DATA[i]);
+ Serial.print(" [RX_RSSI:");
+ Serial.print(radio.readRSSI());
+ Serial.print("]");
+
+ if (radio.ACK_REQUESTED)
+ {
+ radio.sendACK();
+ Serial.print(" - ACK sent");
+ delay(10);
+ }
+ Serial.println();
+ }
+
+ int currPeriod = millis()/TRANSMITPERIOD;
+ if (currPeriod != lastPeriod)
+ {
+ //fill in the struct with new values
+ theData.nodeId = NODEID;
+ theData.uptime = millis();
+ theData.temp = radio.readTemperature();//91.23; //it's hot!
+
+ Serial.print("Sending struct (");
+ Serial.print(sizeof(theData));
+ Serial.print(" bytes) ... ");
+ if (radio.sendWithRetry(GATEWAYID, (const void*)(&theData), sizeof(theData)))
+ Serial.print(" ok!");
+ else Serial.print(" nothing...");
+ Serial.println();
+ lastPeriod=currPeriod;
+ }
+
+ listenRF24();
+
+ if (irrecv.decode(&results)) {
+ Serial.println(results.value, HEX);
+ irrecv.resume(); // Receive the next value
+ blinkStop=millis()+100;
+ digitalWrite(LED, HIGH);
+ }
+
+ if (digitalRead(BUTTON)==LOW) {
+ blinkStop=millis()+1000;
+ digitalWrite(LED, HIGH);
+ }
+
+ if (millis()>blinkStop) {
+ digitalWrite(LED, LOW);
+ }
+
+ if(millis()>timeReady){
+ timeReady=millis()+2000;
+ DateTime now = RTC.now();
+
+ Serial.print(now.year(), DEC);
+ Serial.print('/');
+ Serial.print(now.month(), DEC);
+ Serial.print('/');
+ Serial.print(now.day(), DEC);
+ Serial.print(' ');
+ Serial.print(now.hour(), DEC);
+ Serial.print(':');
+ Serial.print(now.minute(), DEC);
+ Serial.print(':');
+ Serial.print(now.second(), DEC);
+ Serial.println();
+ }
+}
+
+void Blink(byte PIN, int DELAY_MS)
+{
+ pinMode(PIN, OUTPUT);
+ digitalWrite(PIN,HIGH);
+ delay(DELAY_MS);
+ digitalWrite(PIN,LOW);
+}
+
+void resetRFM69(){
+ digitalWrite(RFM69_RESET, HIGH);
+ delay(1);
+ digitalWrite(RFM69_RESET, LOW);
+ delay(10);
+}
+
+void isr_RF24(){
+ waitRF24 = true;
+}
+
+void listenRF24() {
+ if (waitRF24) {
+ waitRF24 = false;
+ if ( radio24.available() )
+ {
+ bool done = false;
+ while (!done)
+ {
+ done = radio24.read( &sensor, sizeof(sensor) );
+ if(sensor.Command == 0) {
+ Serial.print(sensor.SensorID);
+ Serial.print(" ");
+ Serial.print(sensor.ParamID);
+ Serial.print(" ");
+ Serial.print(sensor.ParamValue);
+ Serial.print(" ");
+ Serial.println(sensor.Comment);
+ }
+ }
+ }
+ }
+}
+```
+
+### Code for "receiver" (for the test used Arduino Nano and RFM69HW module on the breadboard)
+
+* Takes using RFM69HW structure
+* Accountable for admission
+* Prints additional information regarding the module RFM69HW (registers, etc.)
+
+```cpp
+#include
+#include
+
+#define NODEID 1
+#define NETWORKID 100
+#define FREQUENCY RF69_433MHZ //Match this with the version of your Moteino! (others: RF69_433MHZ, RF69_868MHZ)
+#define KEY "thisIsEncryptKey" //has to be same 16 characters/bytes on all nodes, not more not less!
+#define LED 6
+#define SERIAL_BAUD 115200
+#define ACK_TIME 30 // # of ms to wait for an ack
+
+#define RFM69_RESET 14
+
+RFM69 radio;
+bool promiscuousMode = false; //set to 'true' to sniff all packets on the same network
+
+typedef struct {
+ int nodeId; //store this nodeId
+ unsigned long uptime; //uptime in ms
+ float temp; //temperature maybe?
+} Payload;
+Payload theData;
+
+void setup() {
+ Serial.begin(SERIAL_BAUD);
+ pinMode(RFM69_RESET, OUTPUT);
+ pinMode(3, INPUT);
+ resetRFM69();
+ radio.setCS(9);
+ //delay(10);
+ radio.initialize(FREQUENCY,NODEID,NETWORKID);
+
+ //radio.setHighPower(); //uncomment only for RFM69HW!
+
+ radio.encrypt(KEY);
+ radio.promiscuous(promiscuousMode);
+ char buff[50];
+ sprintf(buff, "\nListening at %d Mhz...", FREQUENCY==RF69_433MHZ ? 433 : FREQUENCY==RF69_868MHZ ? 868 : 915);
+ Serial.println(buff);
+}
+
+byte ackCount=0;
+void loop() {
+ //process any serial input
+ if (Serial.available() > 0)
+ {
+ char input = Serial.read();
+ if (input == 'r') //d=dump all register values
+ radio.readAllRegs();
+ if (input == 'E') //E=enable encryption
+ radio.encrypt(KEY);
+ if (input == 'e') //e=disable encryption
+ radio.encrypt(null);
+ if (input == 'p')
+ {
+ promiscuousMode = !promiscuousMode;
+ radio.promiscuous(promiscuousMode);
+ Serial.print("Promiscuous mode ");Serial.println(promiscuousMode ? "on" : "off");
+ }
+
+ if (input == 'd') //d=dump flash area
+ {
+ Serial.println("Flash content:");
+ int counter = 0;
+
+ while(counter<=256){
+ //Serial.print(flash.readByte(counter++), HEX);
+ Serial.print('.');
+ }
+ //while(flash.busy());
+ Serial.println();
+ }
+ if (input == 'D')
+ {
+ Serial.print("Deleting Flash chip content... ");
+ //flash.chipErase();
+ //while(flash.busy());
+ Serial.println("DONE");
+ }
+ if (input == 'i')
+ {
+ Serial.print("DeviceID: ");
+ //word jedecid = flash.readDeviceId();
+ //Serial.println(jedecid, HEX);
+ }
+ }
+
+ if (radio.receiveDone())
+ {
+ Serial.print('[');Serial.print(radio.SENDERID, DEC);Serial.print("] ");
+ Serial.print(" [RX_RSSI:");Serial.print(radio.readRSSI());Serial.print("]");
+ if (promiscuousMode)
+ {
+ Serial.print("to [");Serial.print(radio.TARGETID, DEC);Serial.print("] ");
+ }
+
+ if (radio.DATALEN != sizeof(Payload))
+ Serial.print("Invalid payload received, not matching Payload struct!");
+ else
+ {
+ theData = *(Payload*)radio.DATA; //assume radio.DATA actually contains our struct and not something else
+ Serial.print(" nodeId=");
+ Serial.print(theData.nodeId);
+ Serial.print(" uptime=");
+ Serial.print(theData.uptime);
+ Serial.print(" temp=");
+ Serial.print(theData.temp);
+ }
+
+ if (radio.ACK_REQUESTED)
+ {
+ byte theNodeID = radio.SENDERID;
+ radio.sendACK();
+ Serial.print(" - ACK sent.");
+
+ // When a node requests an ACK, respond to the ACK
+ // and also send a packet requesting an ACK (every 3rd one only)
+ // This way both TX/RX NODE functions are tested on 1 end at the GATEWAY
+ if (ackCount++%3==0)
+ {
+ Serial.print(" Pinging node ");
+ Serial.print(theNodeID);
+ Serial.print(" - ACK...");
+ delay(3); //need this when sending right after reception .. ?
+ if (radio.sendWithRetry(theNodeID, "ACK TEST", 8, 0)) // 0 = only 1 attempt, no retries
+ Serial.print("ok!");
+ else Serial.print("nothing");
+ }
+ }
+ Serial.println();
+ Blink(LED,3);
+ }
+}
+
+void Blink(byte PIN, int DELAY_MS)
+{
+ pinMode(PIN, OUTPUT);
+ digitalWrite(PIN,HIGH);
+ delay(DELAY_MS);
+ digitalWrite(PIN,LOW);
+}
+
+void resetRFM69(){
+ digitalWrite(RFM69_RESET, HIGH);
+ delay(1);
+ digitalWrite(RFM69_RESET, LOW);
+ delay(10);
+}
+```
+
+## Product versions
+
+
+
+
+
Revision
+
Description
+
Release
+
+
+
0.9
+
Prototype
+
05.05.2014
+
+
+
1.0
+
Public version
+
05.07.2014
+
+
+
+
+## Applications
+
+* Universal Wireless Gateway RF2.4 GHz (nRF24l01 +), RF433 MHz (RFM69HW), IR and LAN (using Ethernet Shield)
+* Logging system commands and data wireless devices with the time (using the Ethernet Shield)
+* Design and construction of administering various wireless commands at a certain time (for example, "turn on the light August 23, 2014 at 18:02" or "every day to include an automatic watering at 5:00")
+
+## Questions and Answers
+
+* Blog WireLess Gate Shield RU
+
+* Ask a question by e-mail support@devicter.ru
+
+## How to buy
+
+This product can be purchased:
+
+China (shipping worldwide)
+
+[Elecrow store](http://www.elecrow.com/wireless-gate-shield-p-1139.html)
+
+[Seeed store](https://www.seeedstudio.com/depot/wireless-gate-shield.html)
+
+Russia
+
+[Devicter store](http://devicter.ru/goods/WireLess-Gate-Shield)
+
+## Links
+
+* [Description RFM69HW](http://st.devicter.ru/9/1115/243/RFM69HW.pdf)
+
+* [Description nRF24l01+](ftp://imall.iteadstudio.com/Modules/IM120606002_nRF24L01_module/DS_nRF24L01.pdf)
+
+* [schematic of the device](http://wiki.devicter.ru/images/c/c7/Wl-Scheme.PNG)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
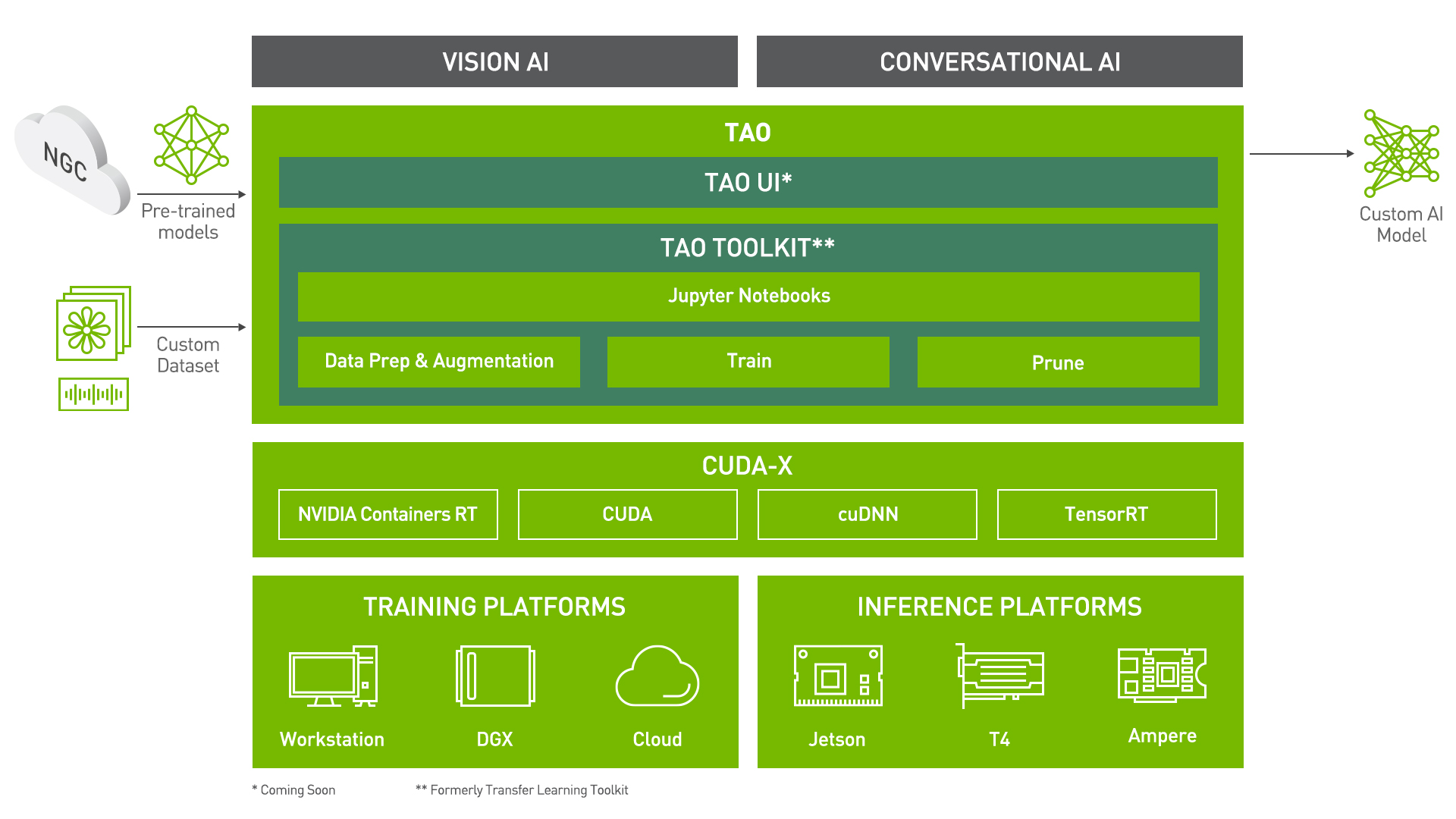










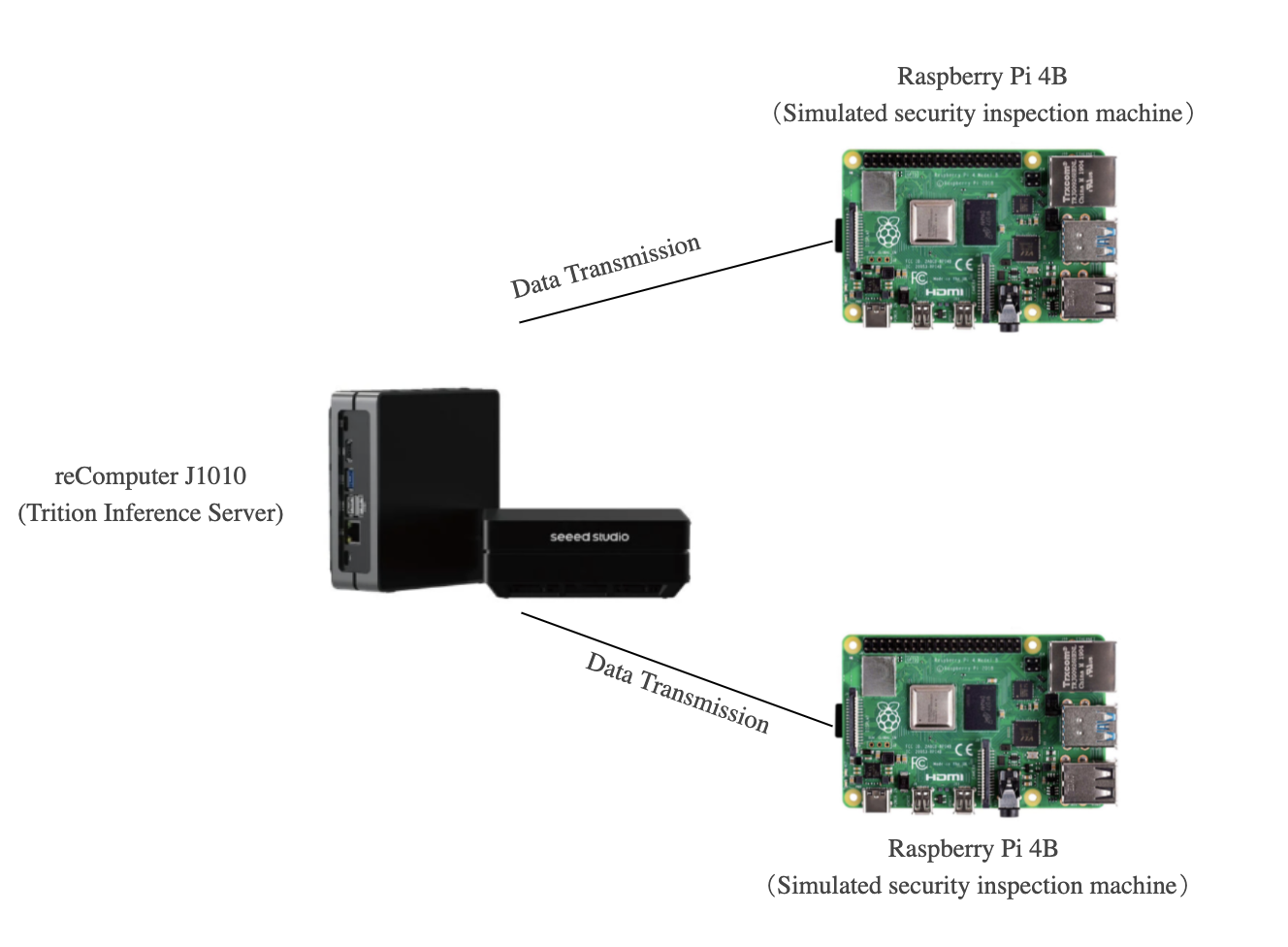
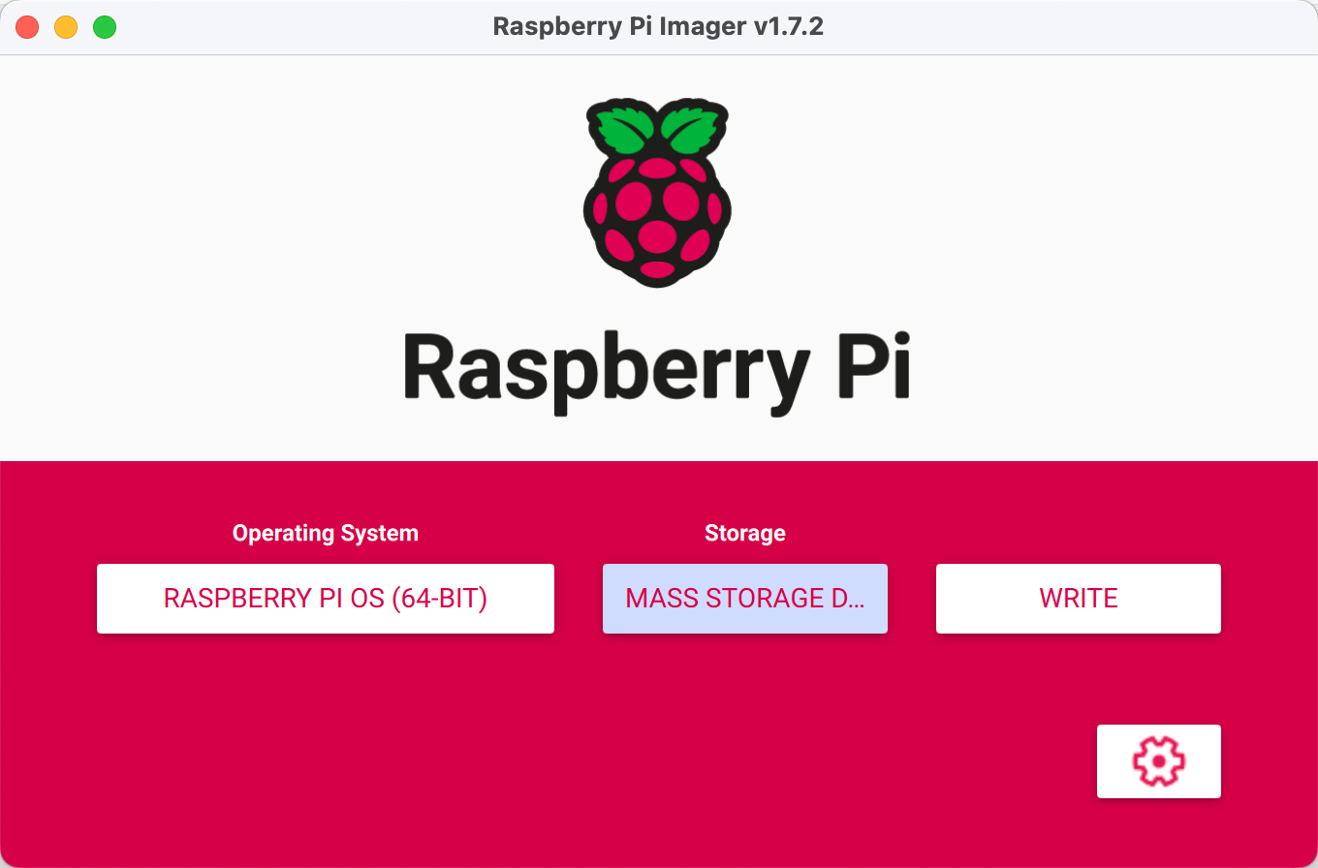
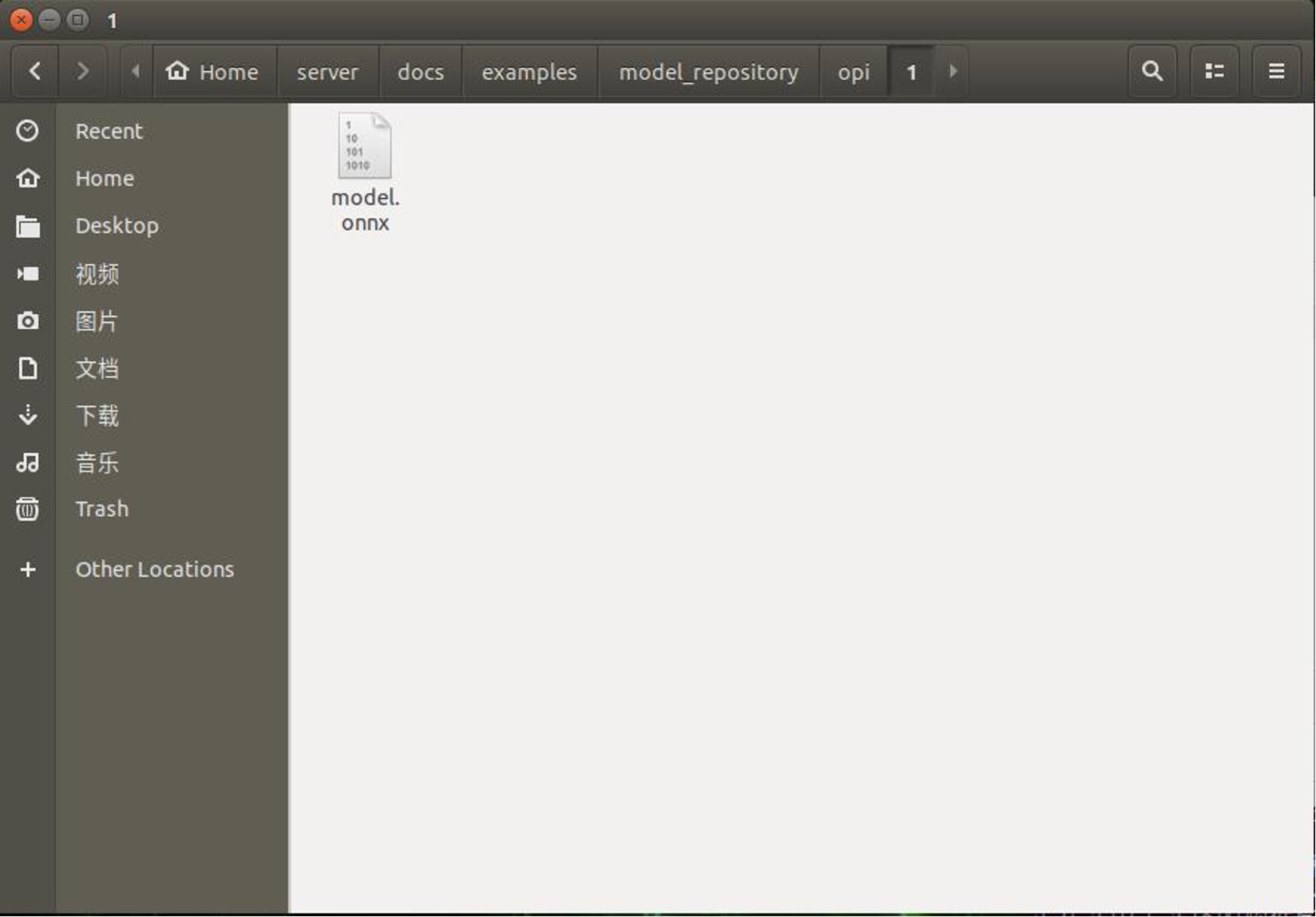
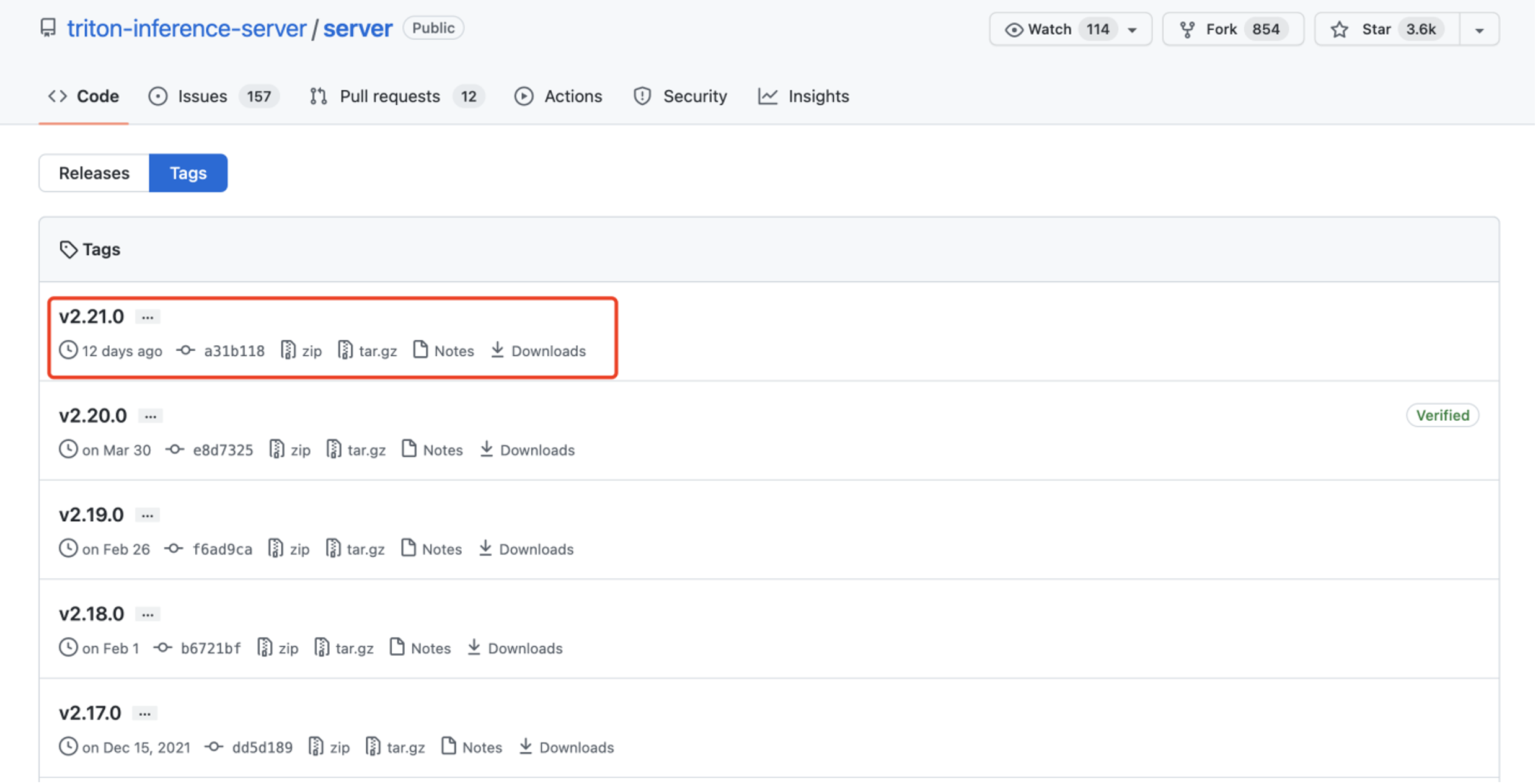
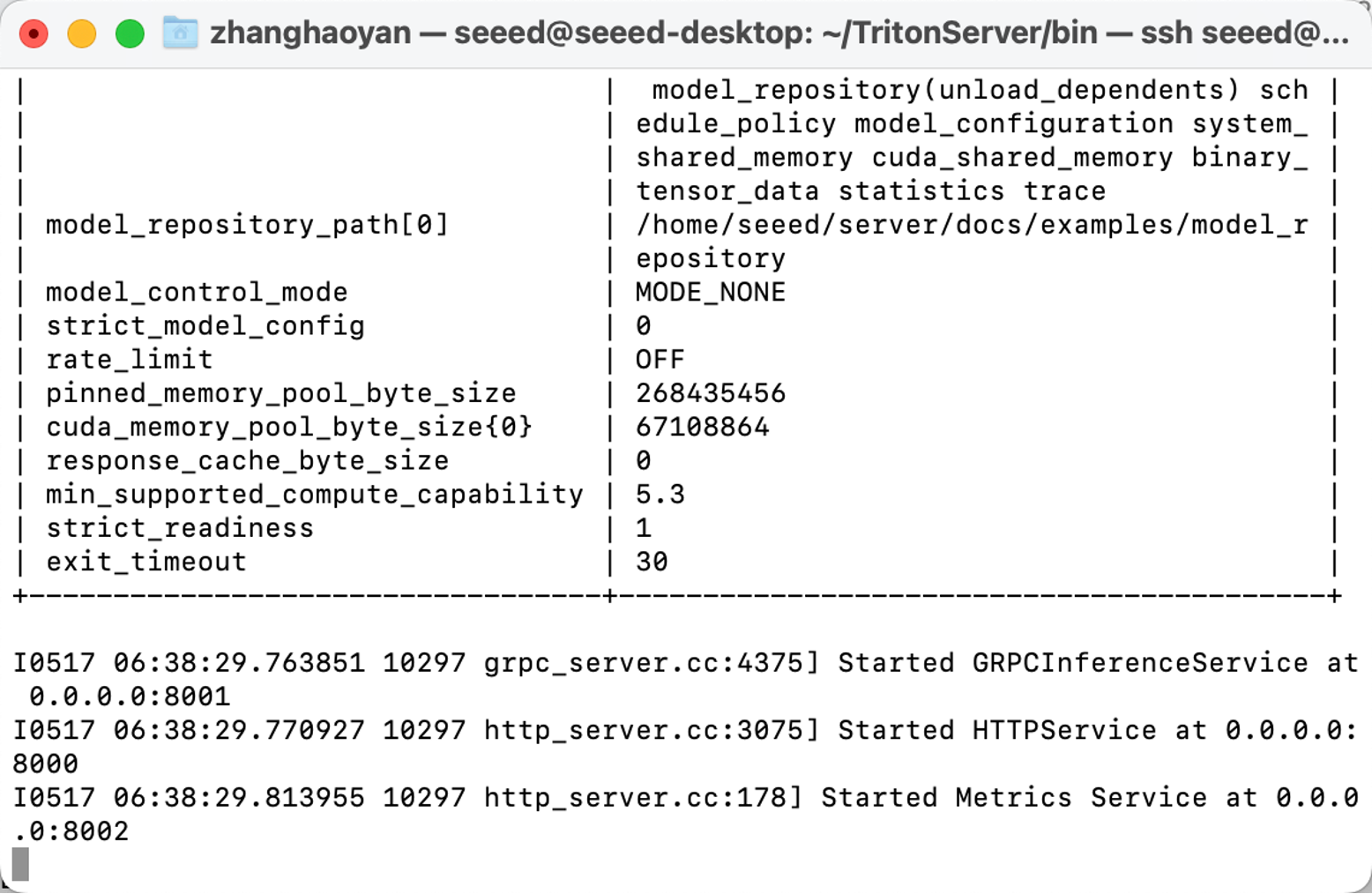
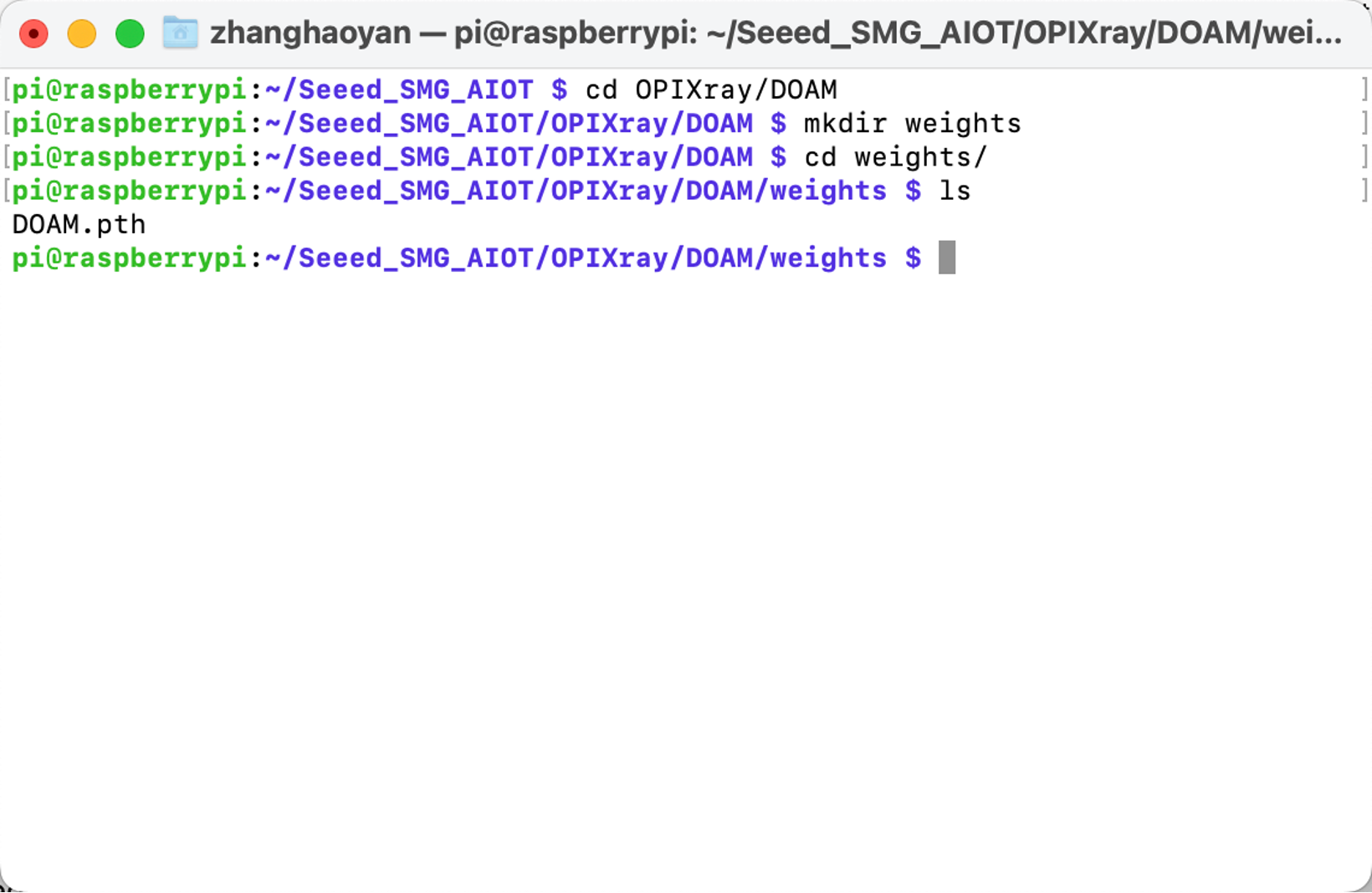
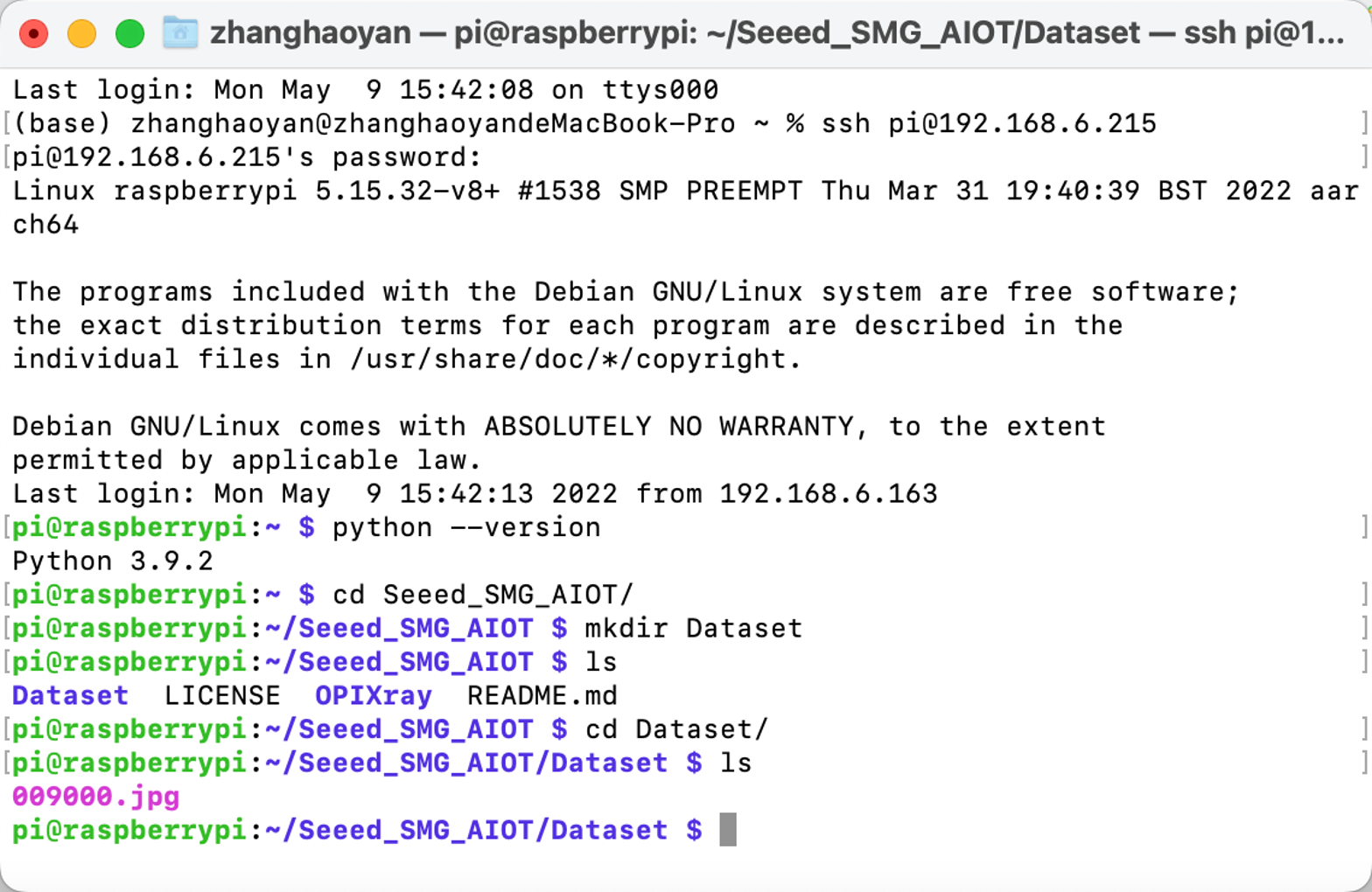
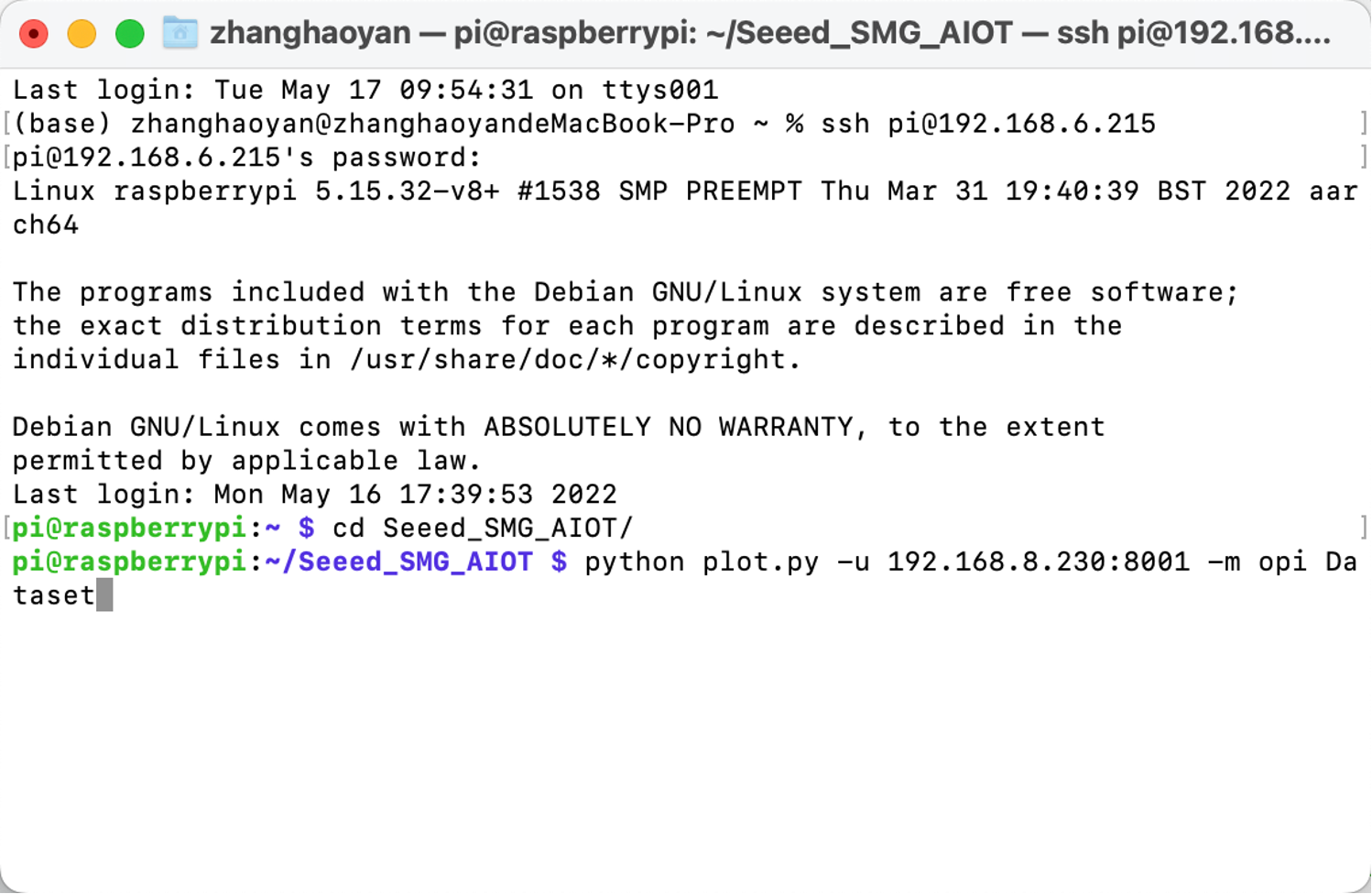
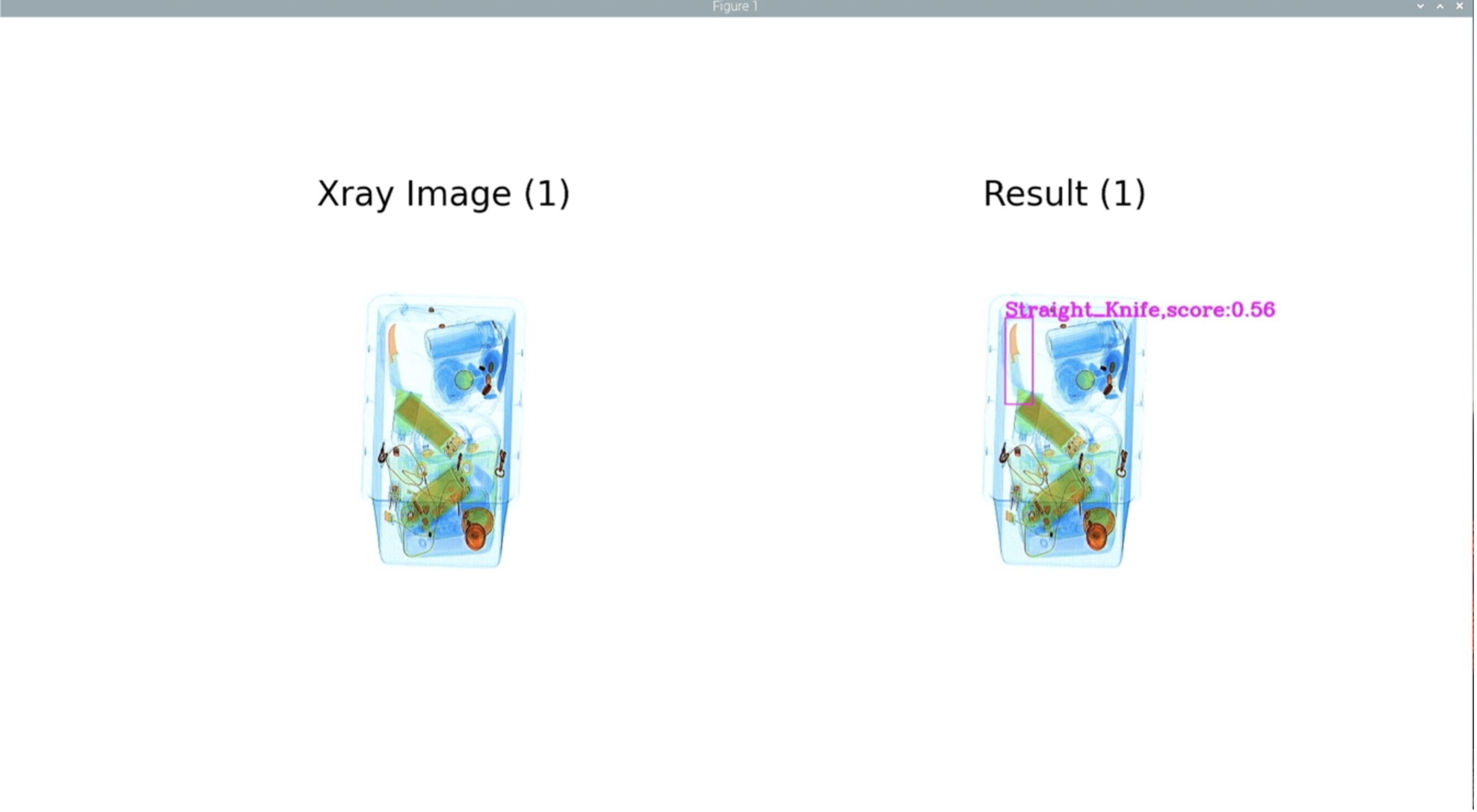
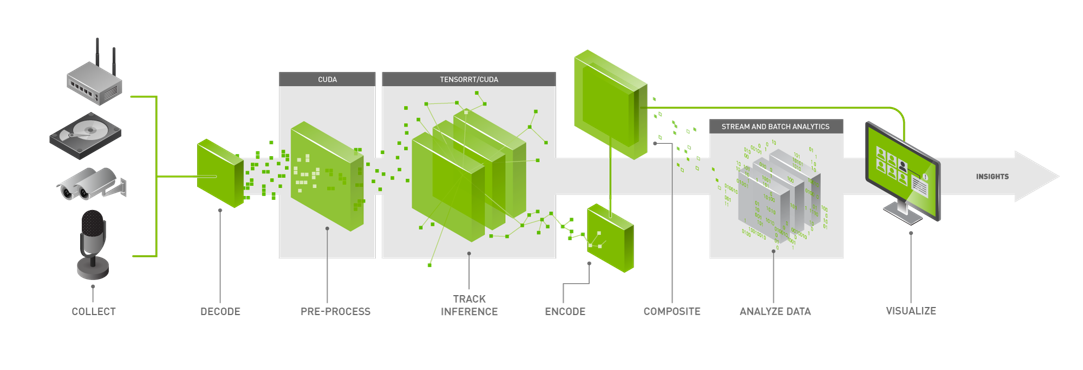













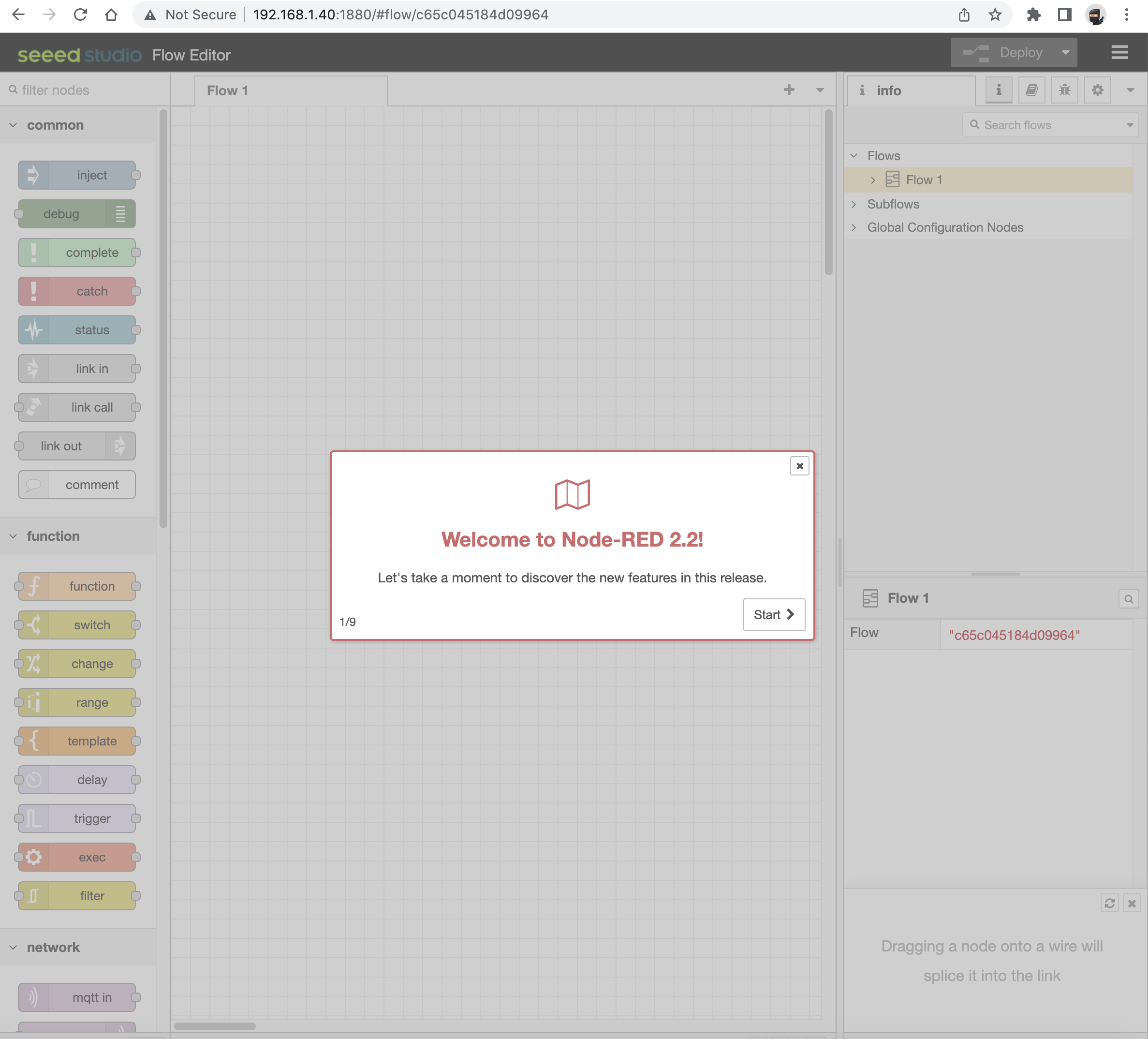
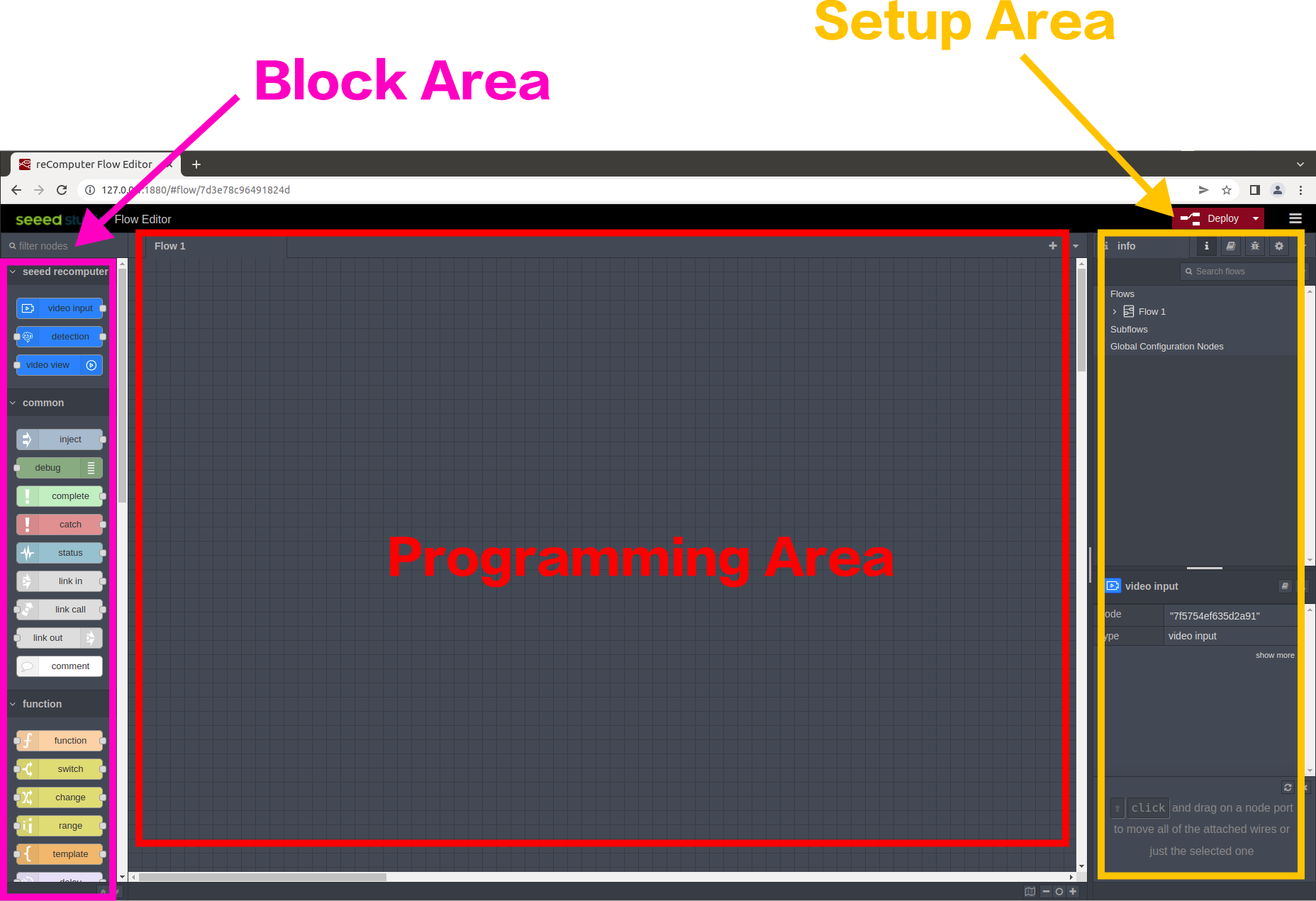
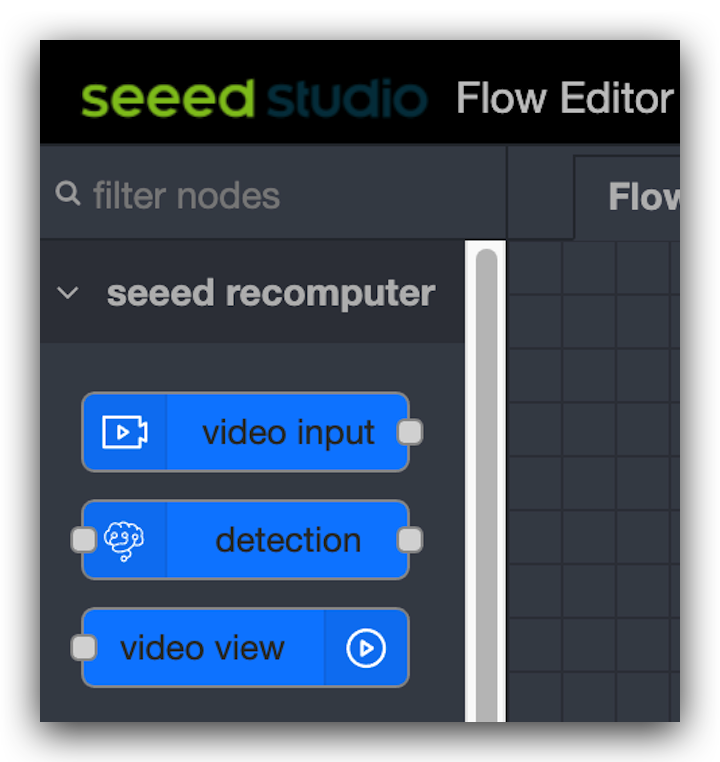
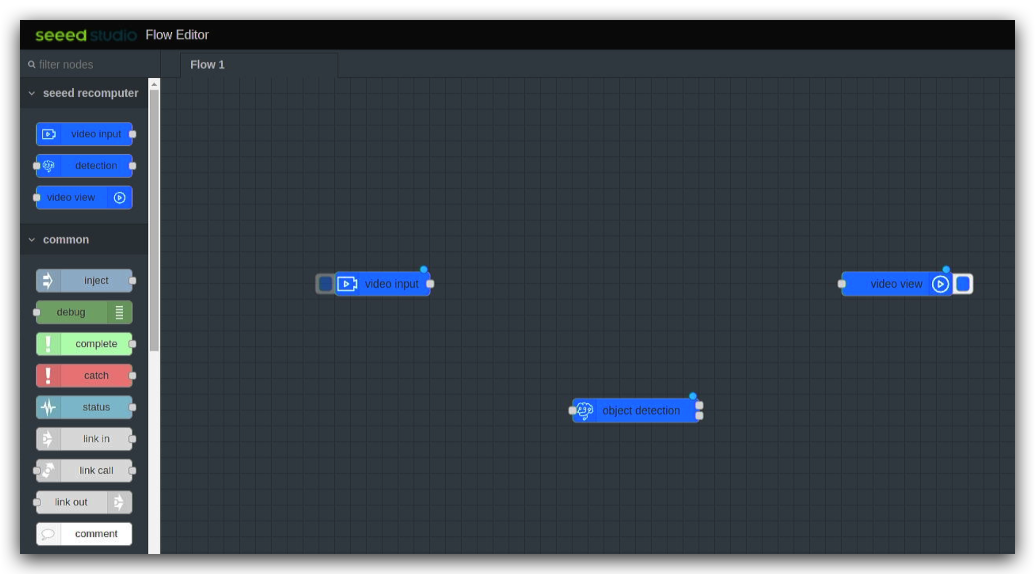
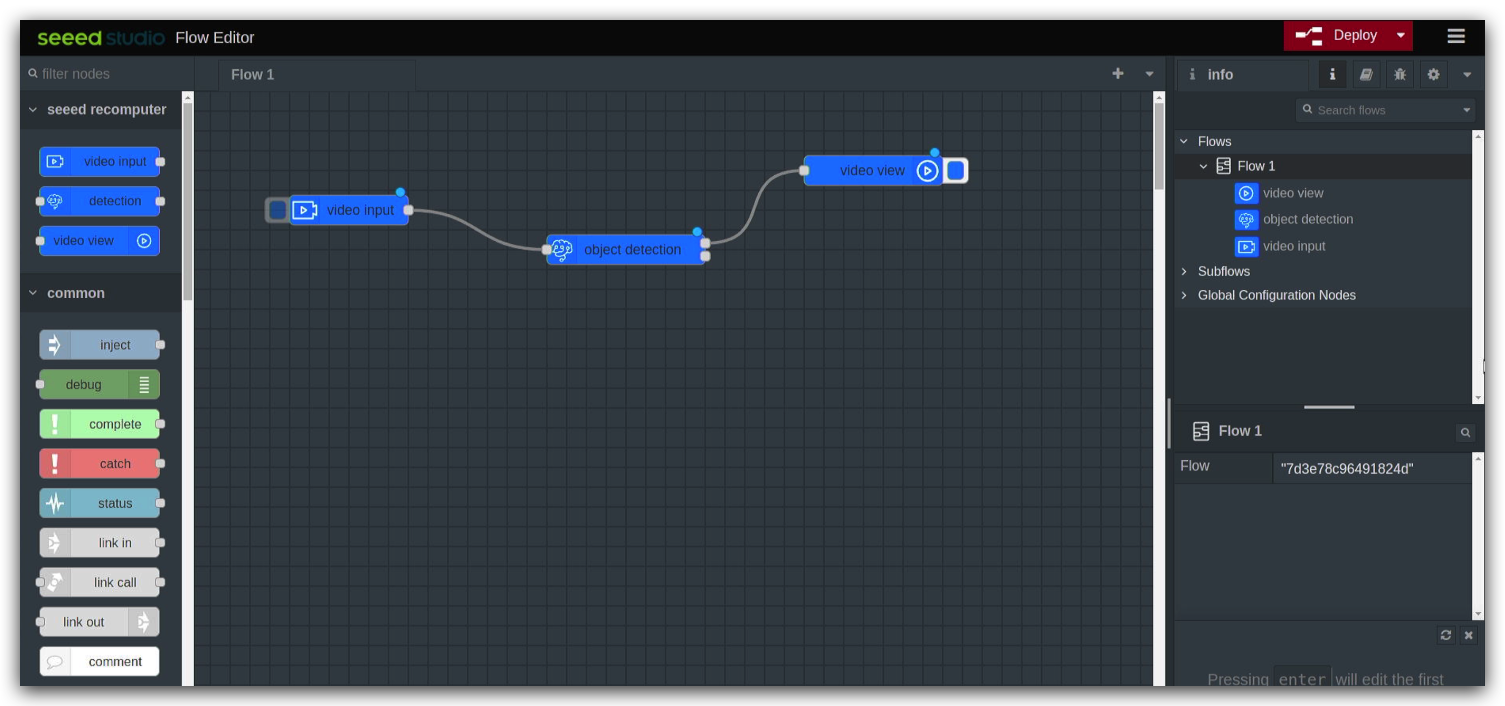
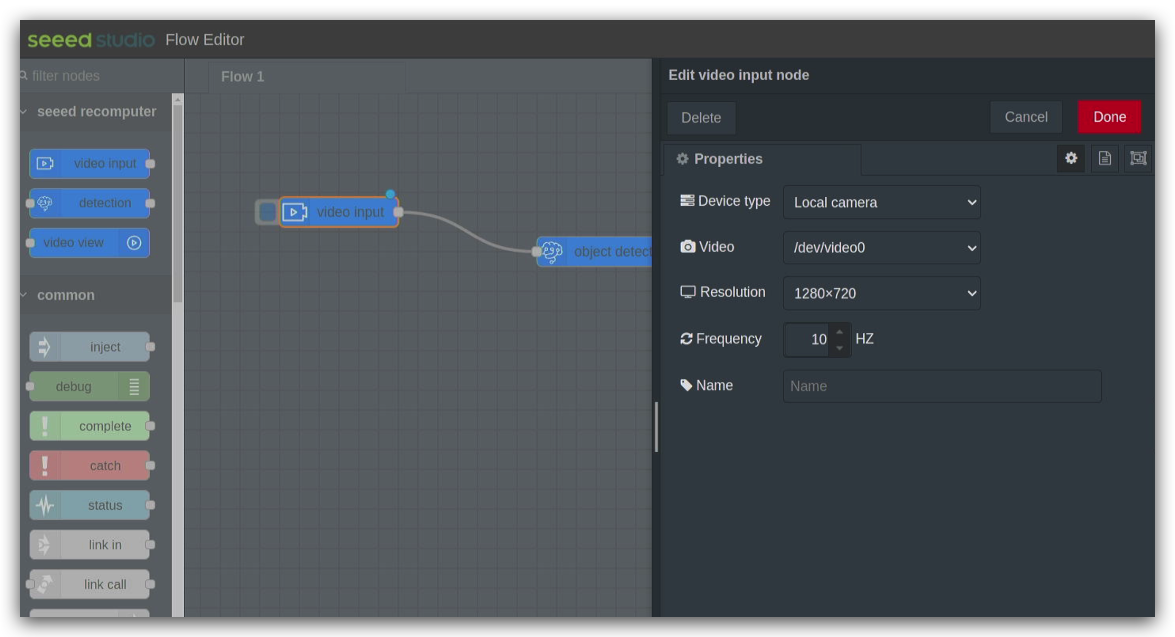
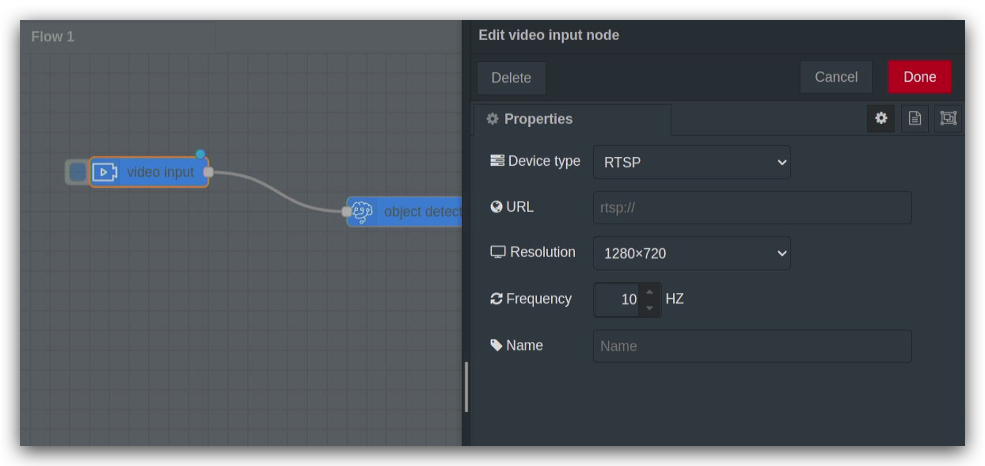
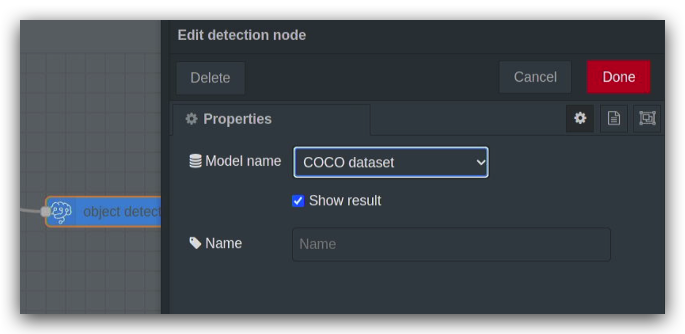
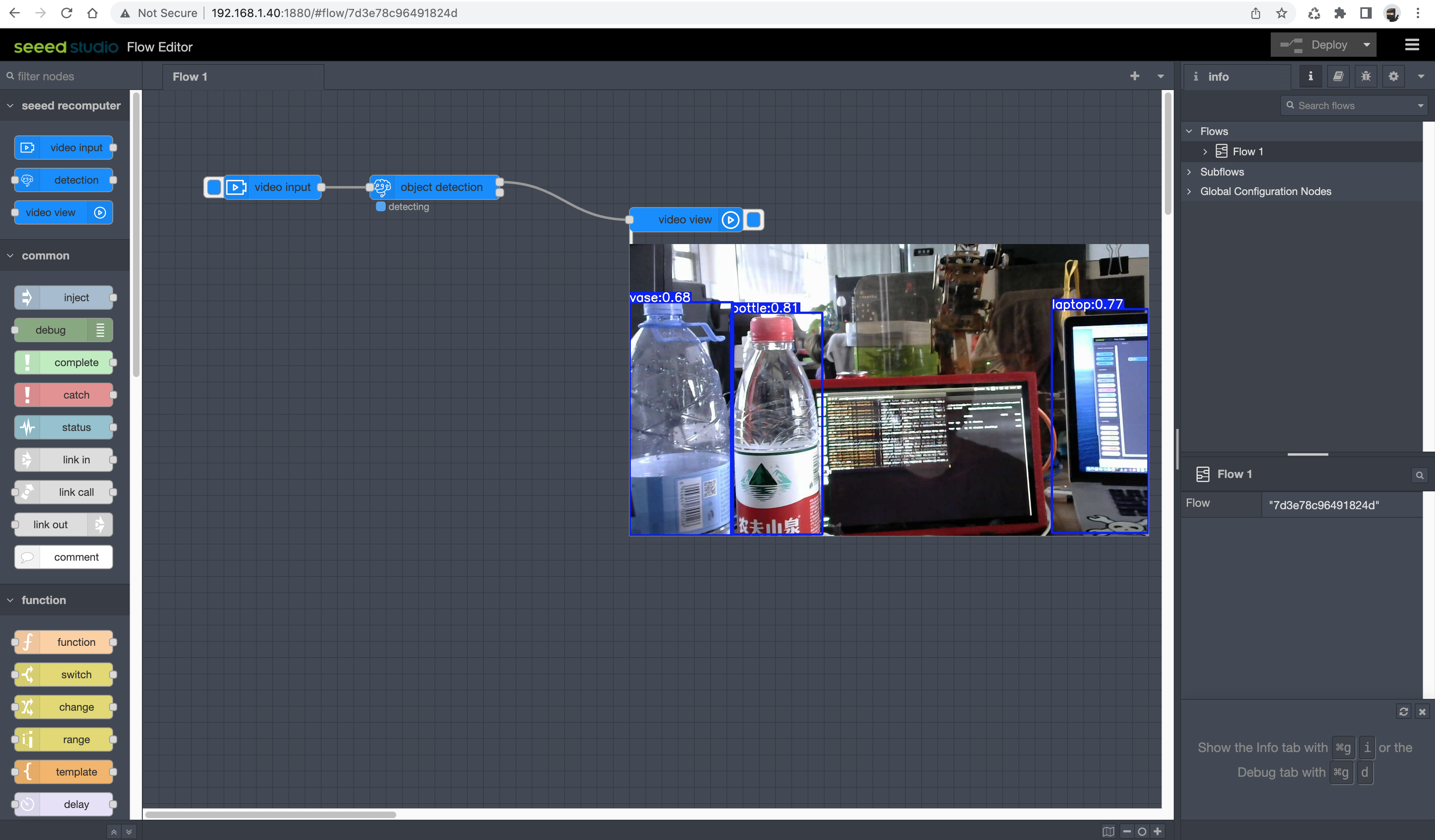
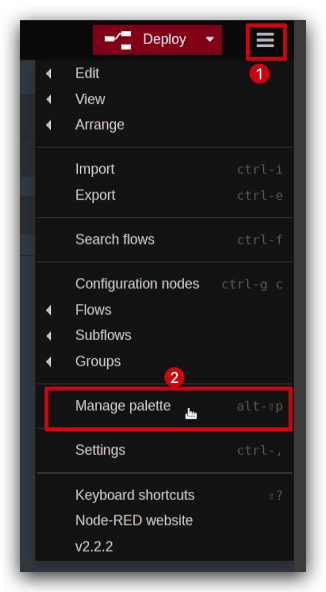
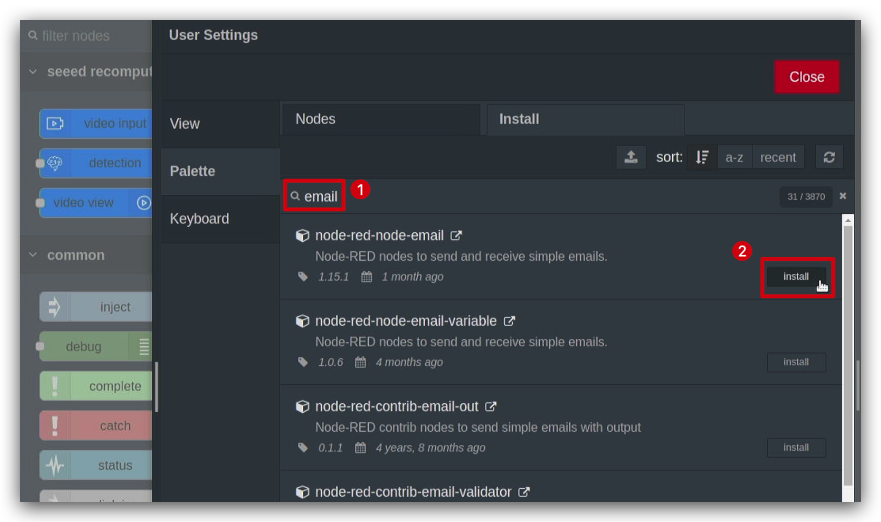
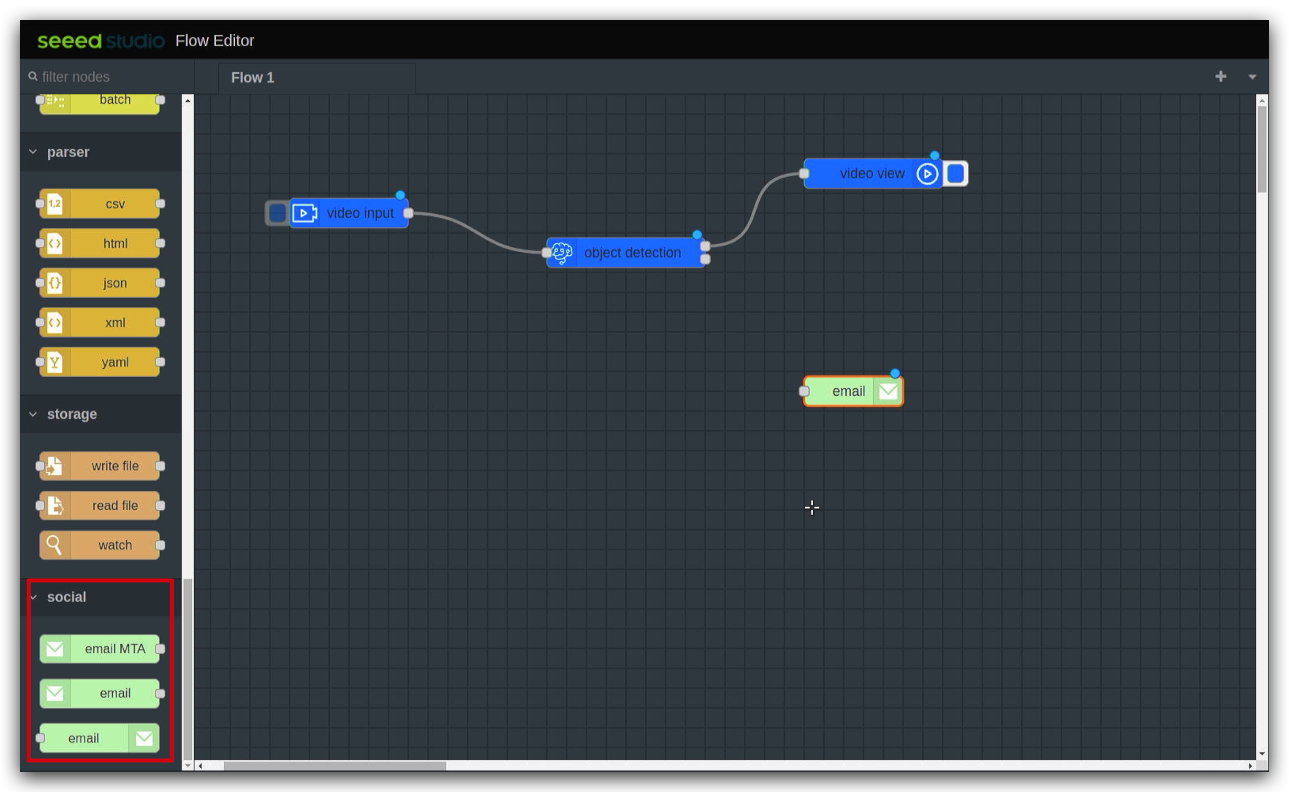
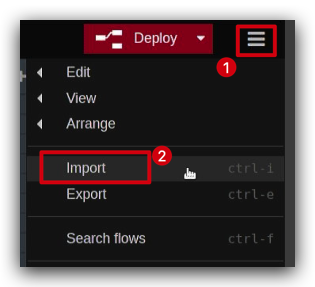
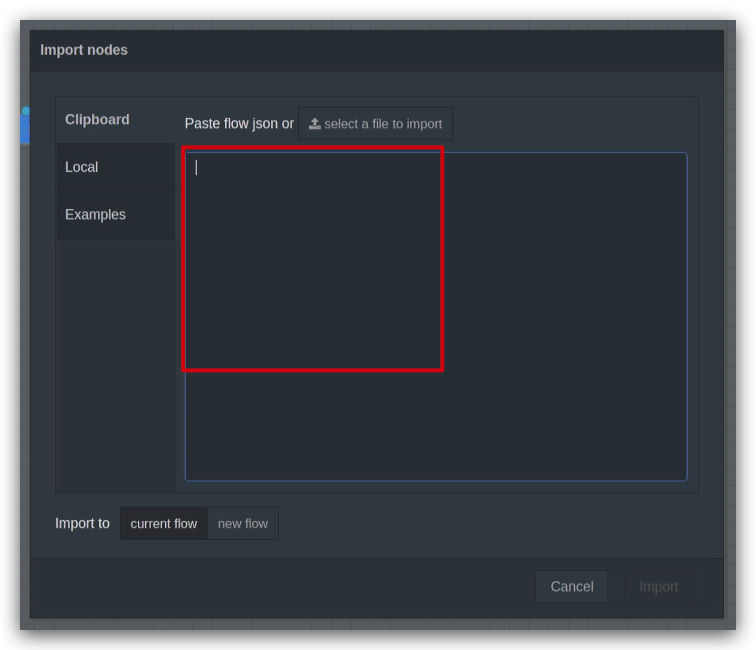
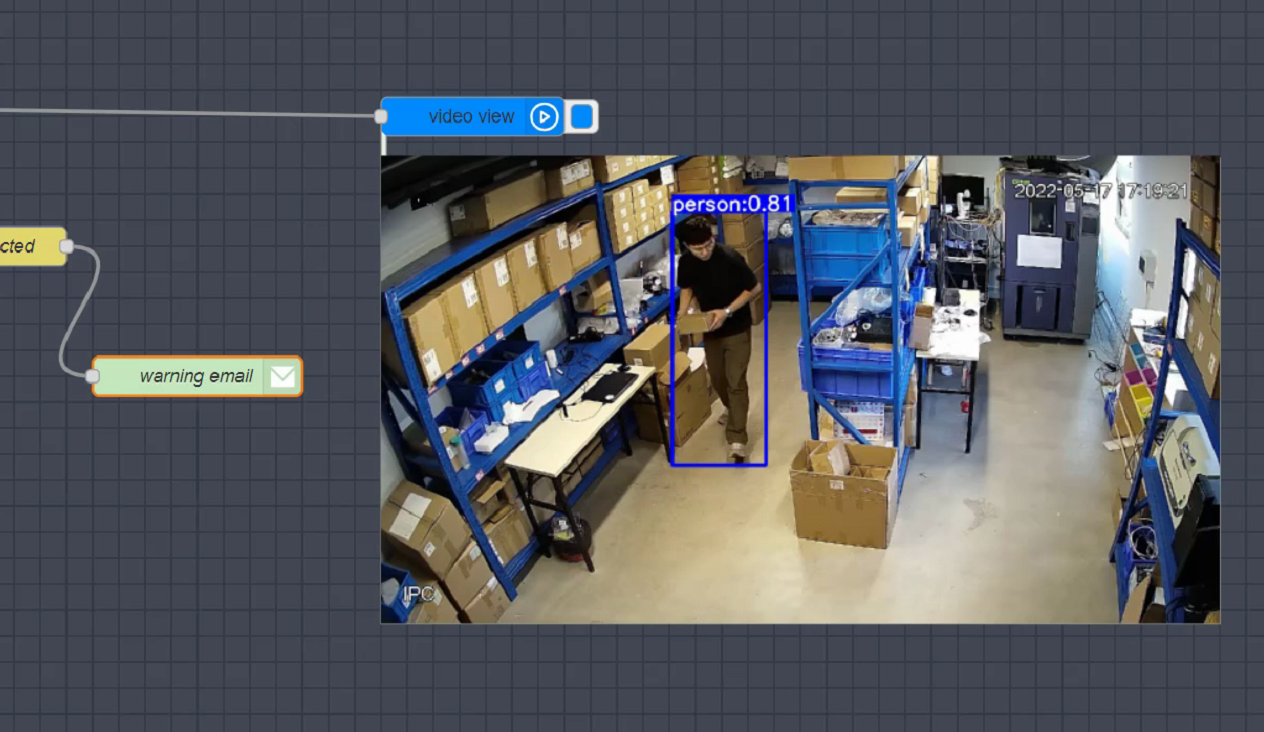
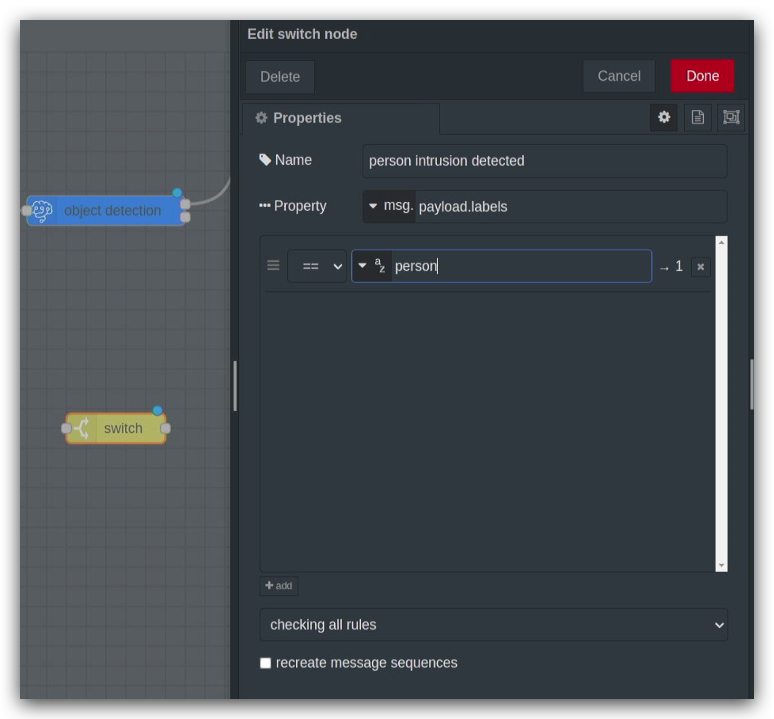
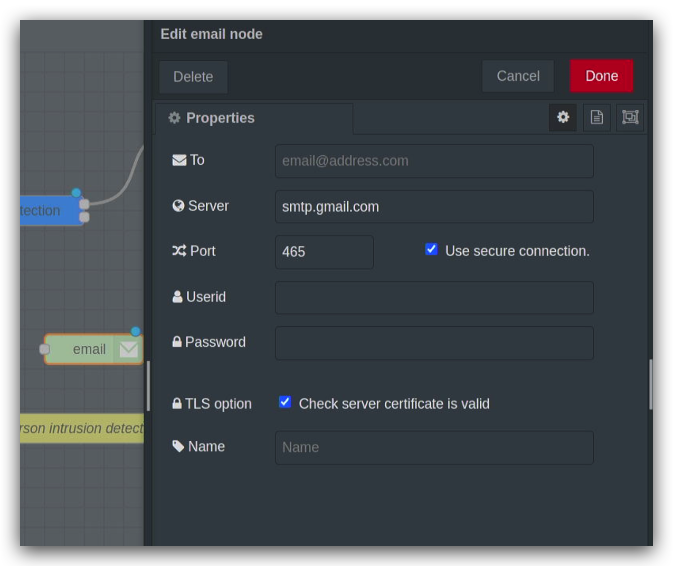
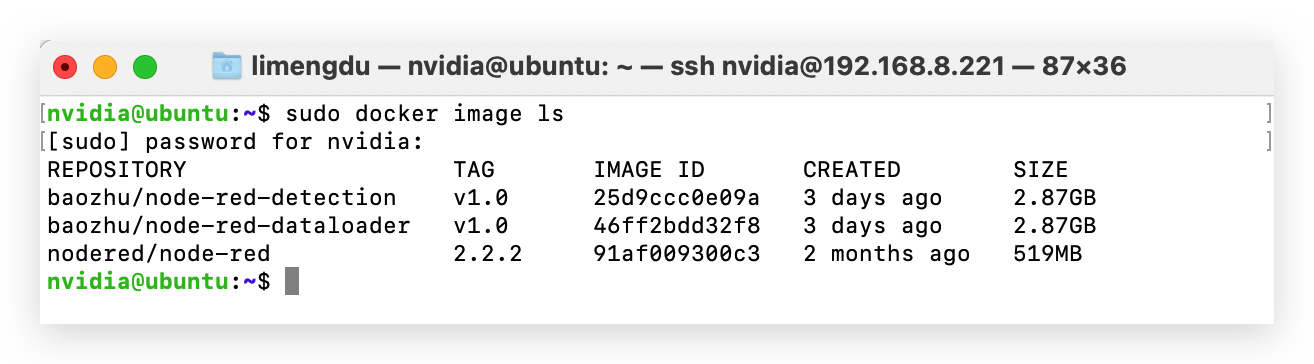





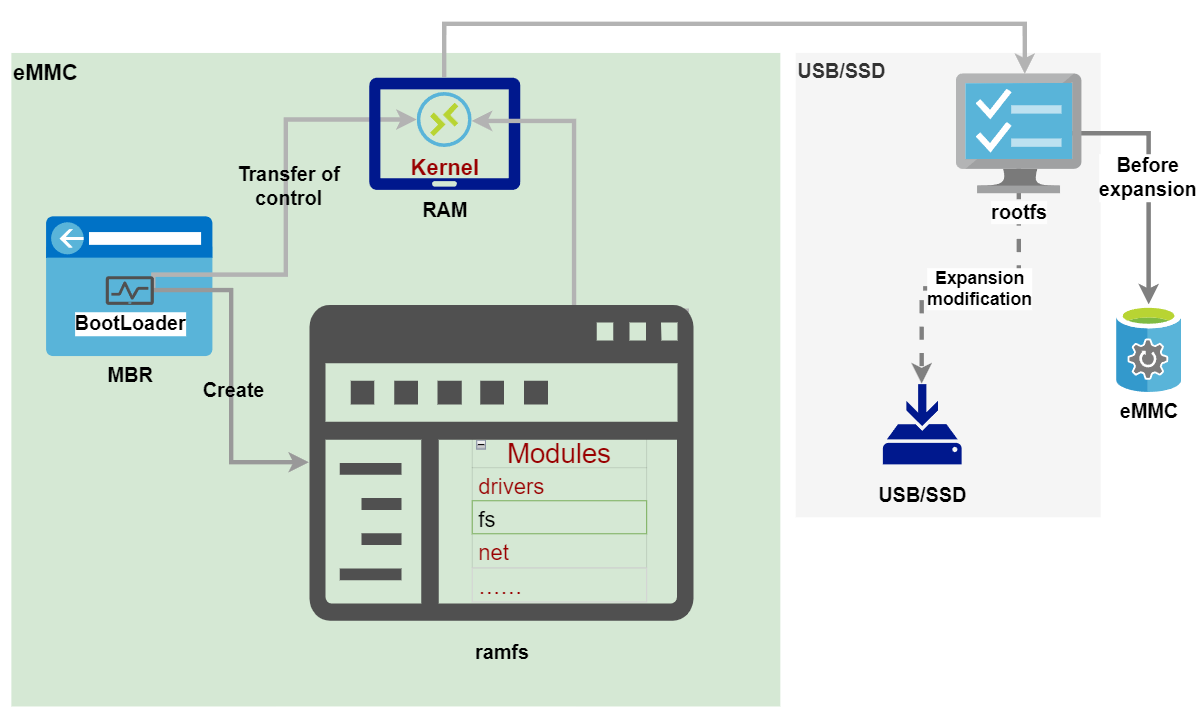

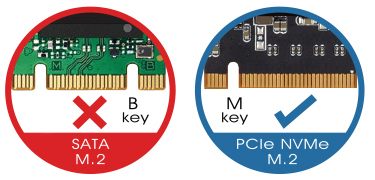
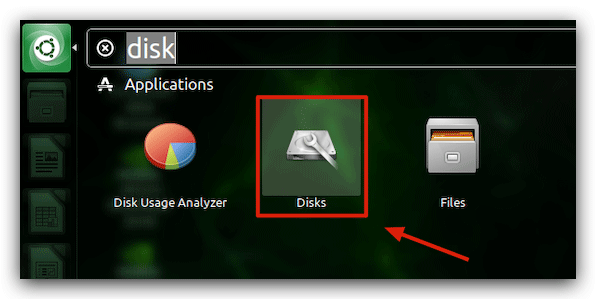
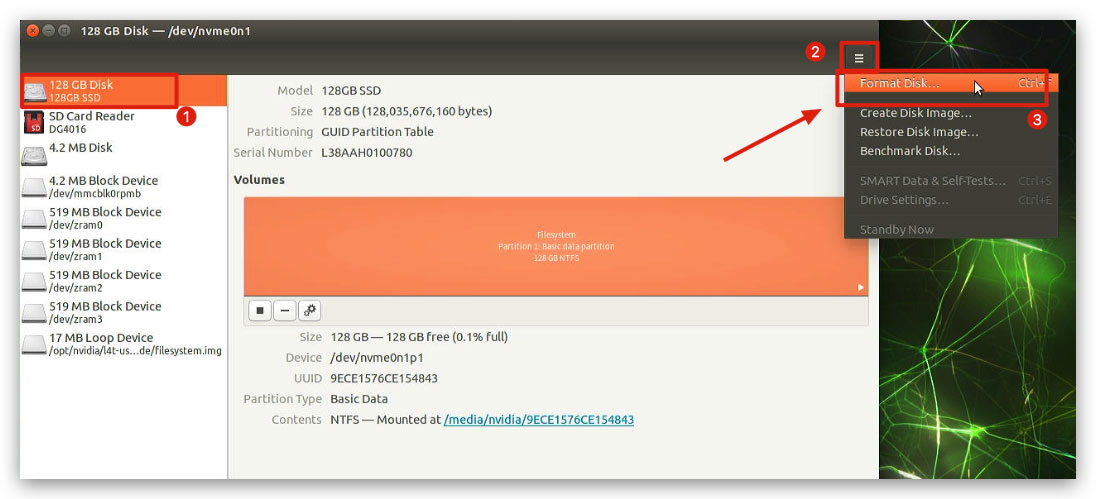
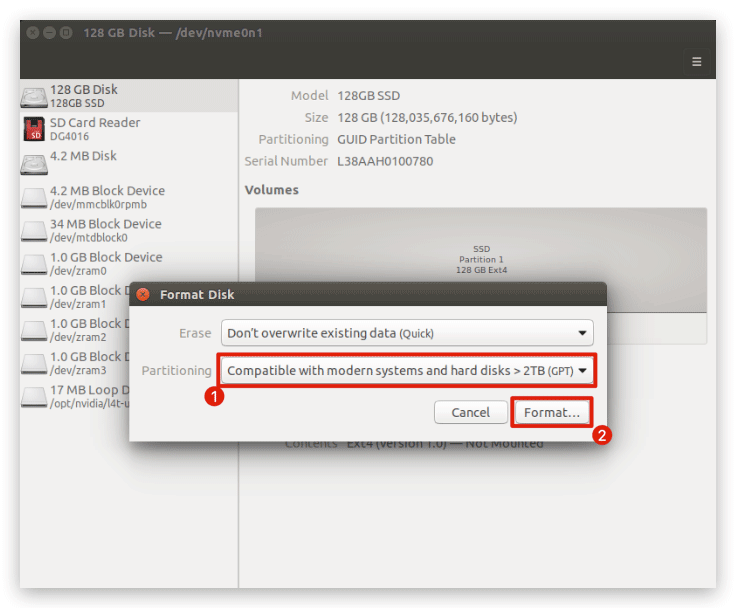
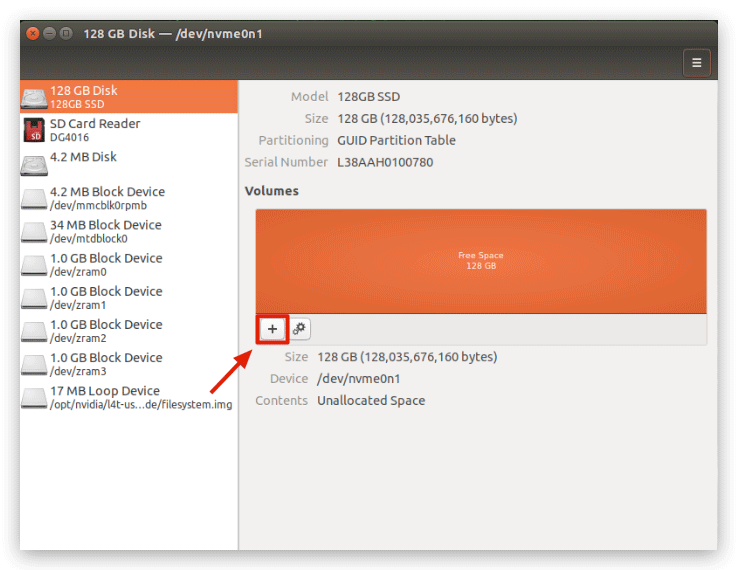
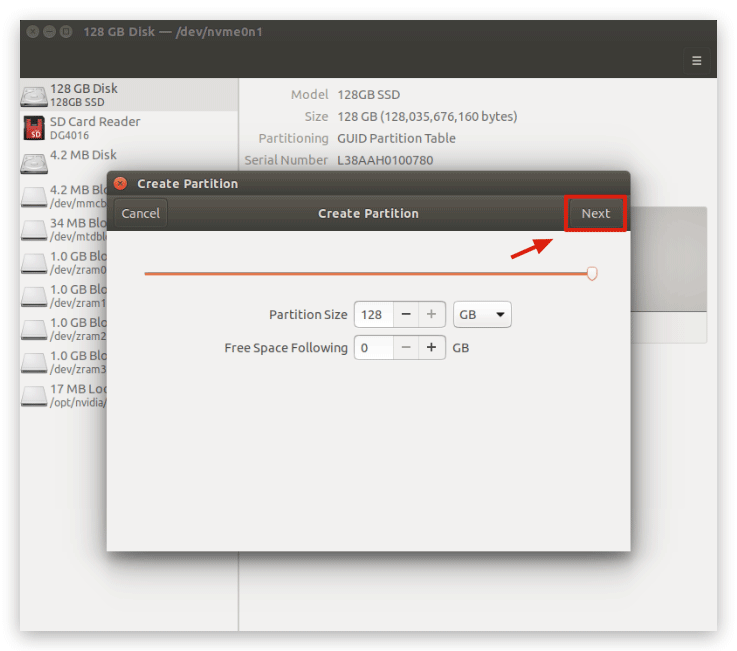
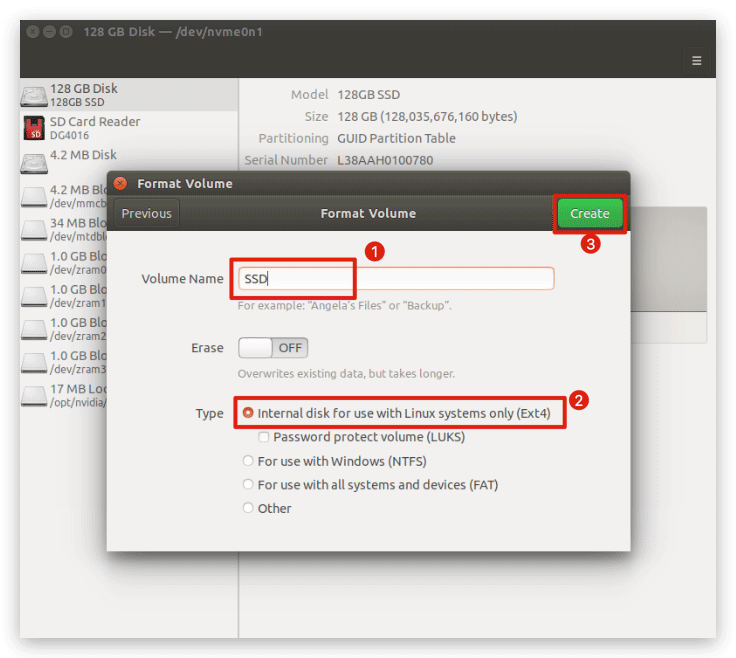
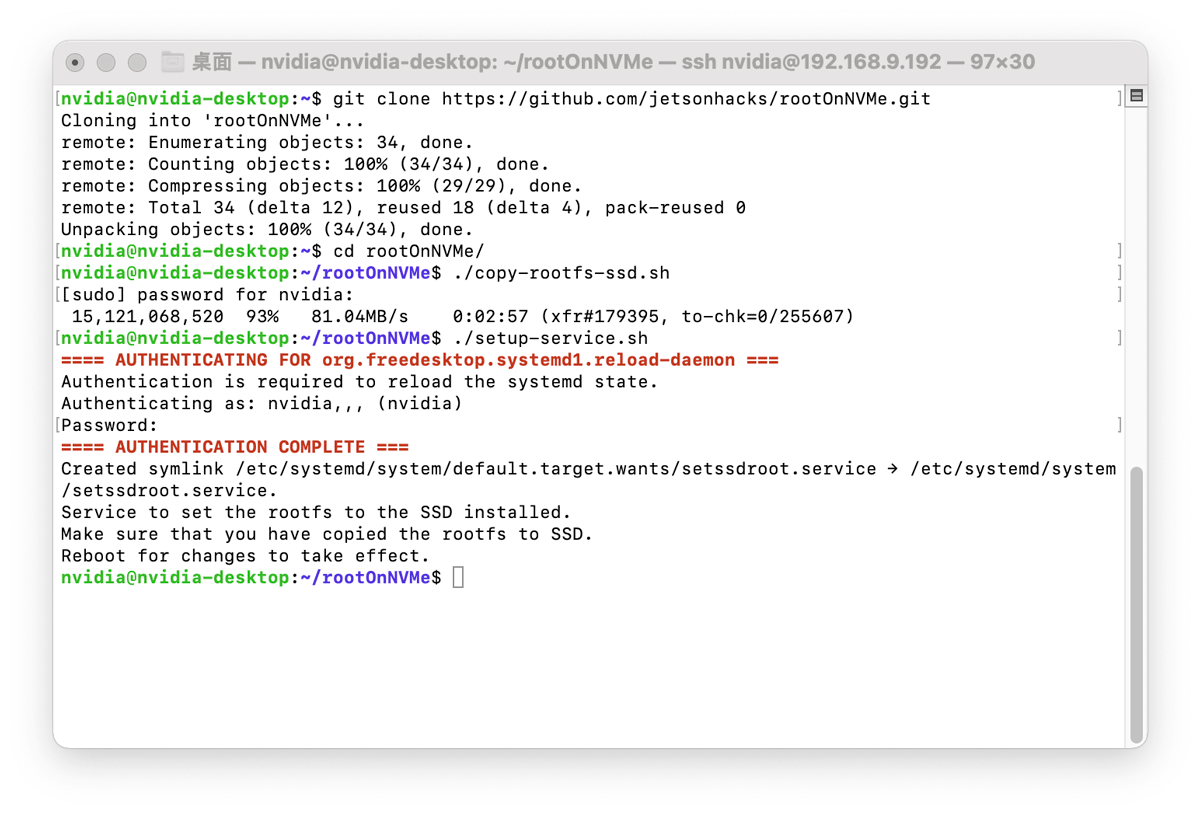
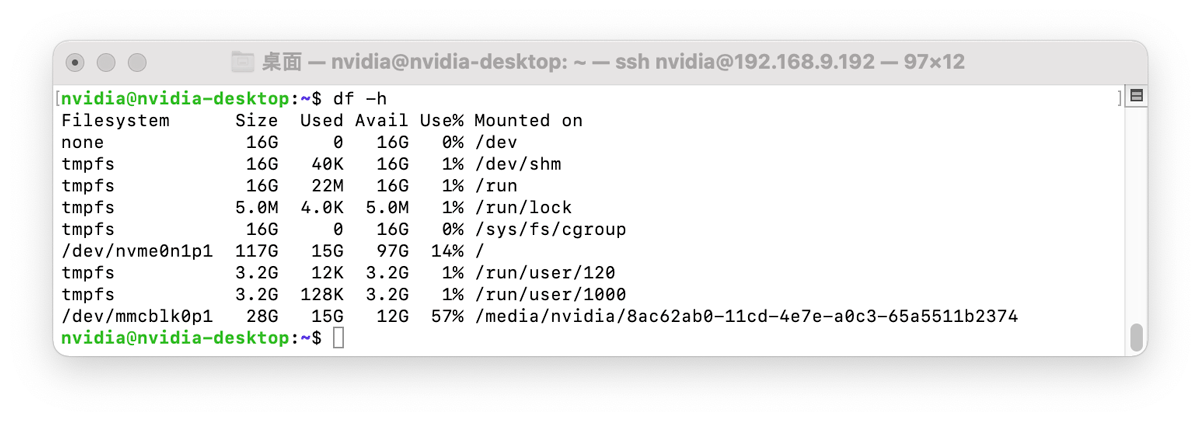
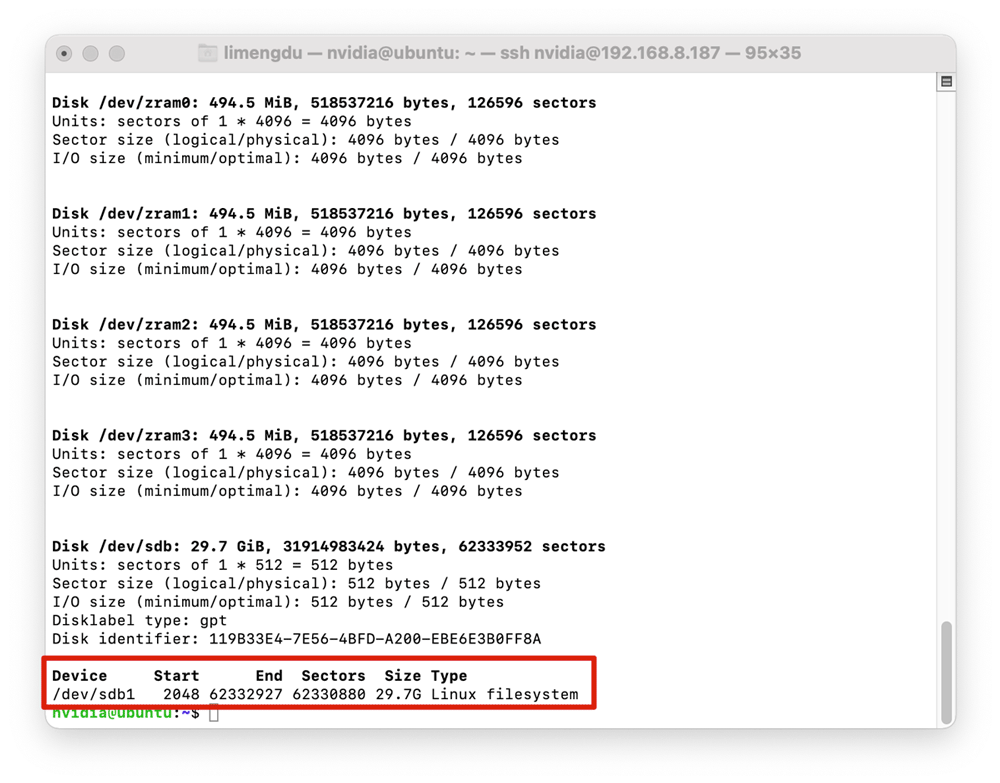

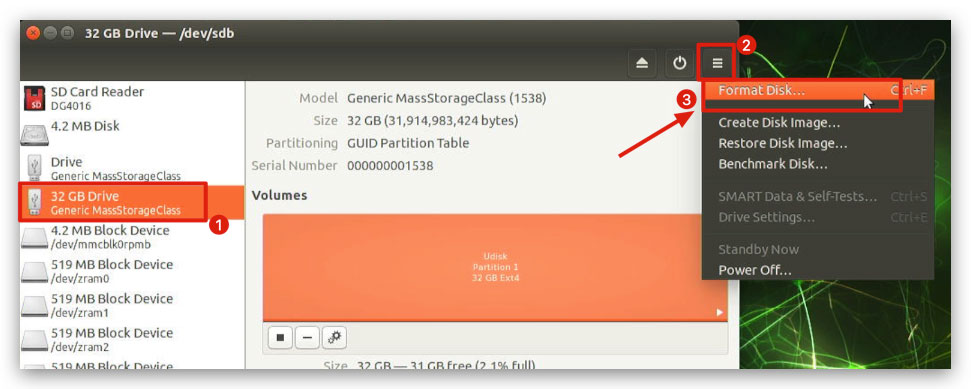
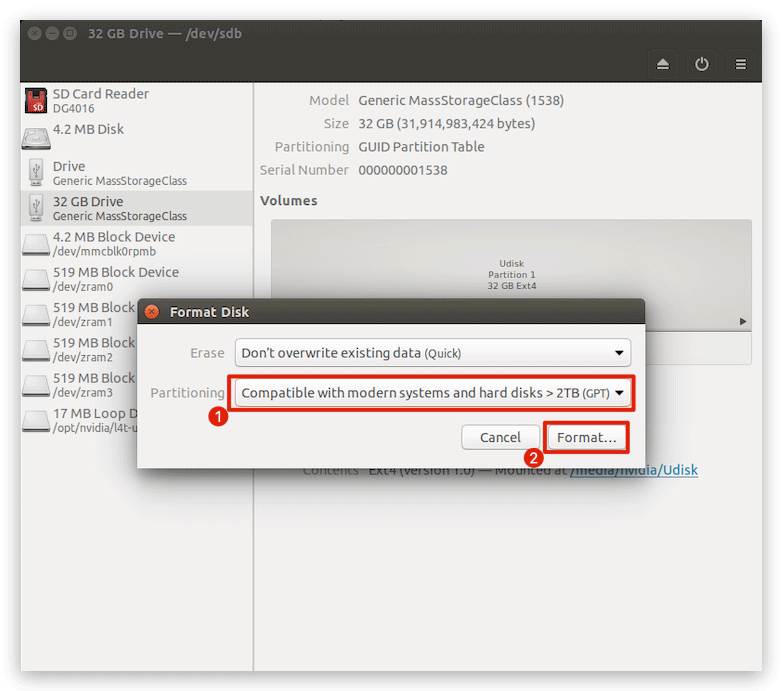
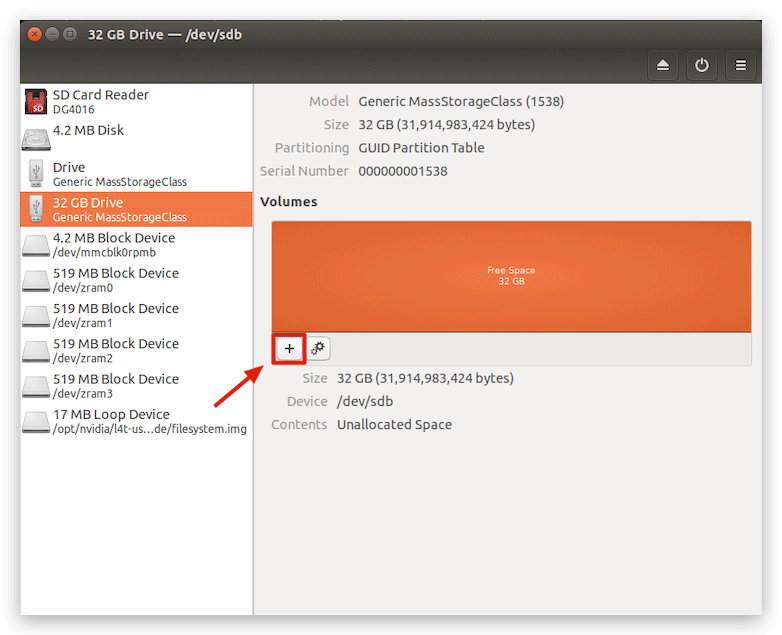
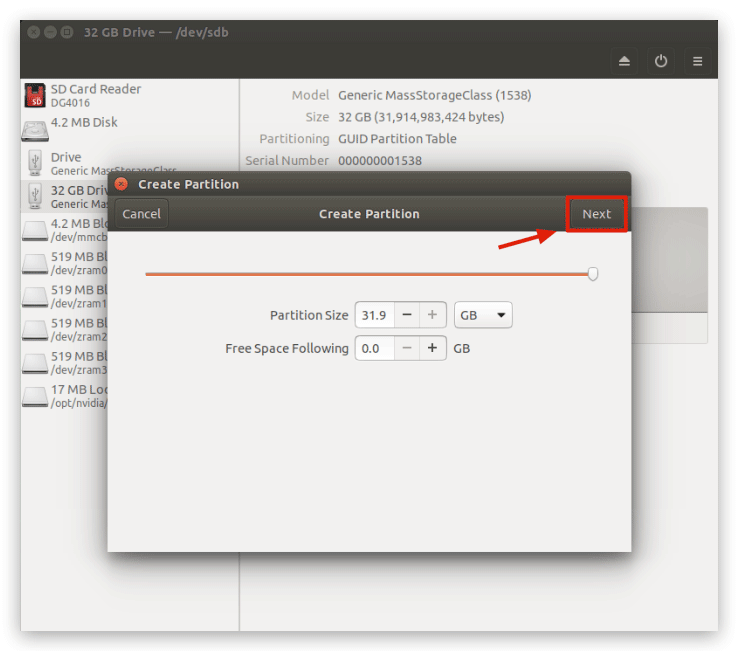
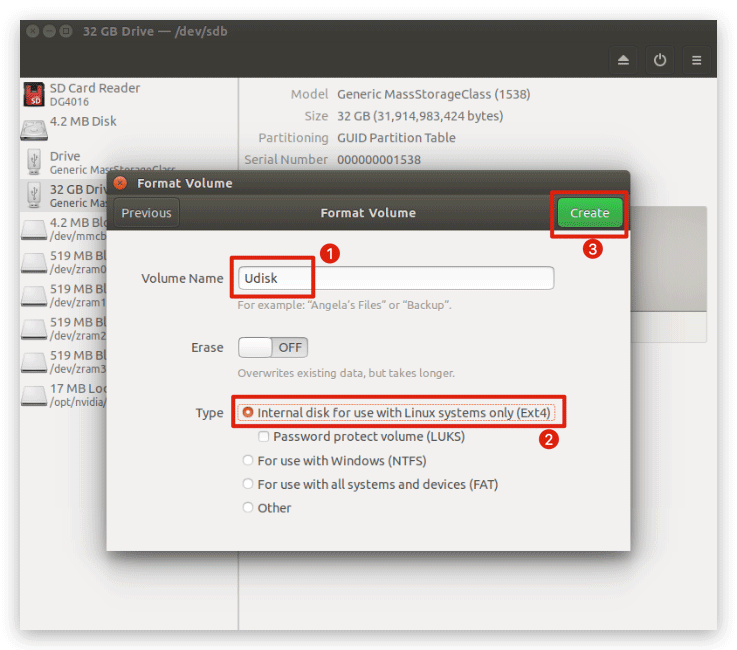
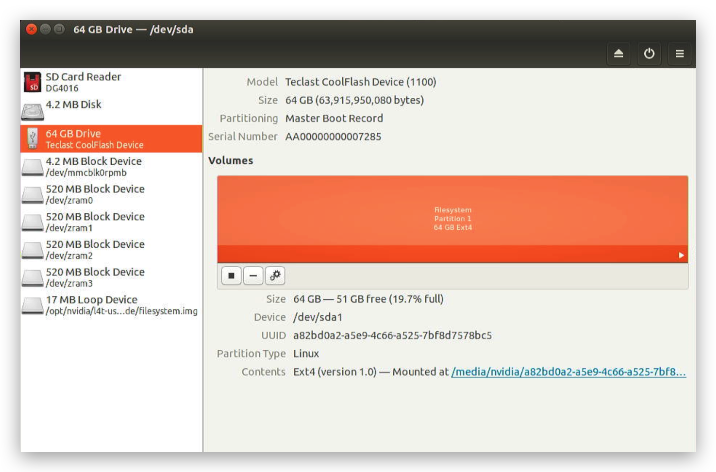
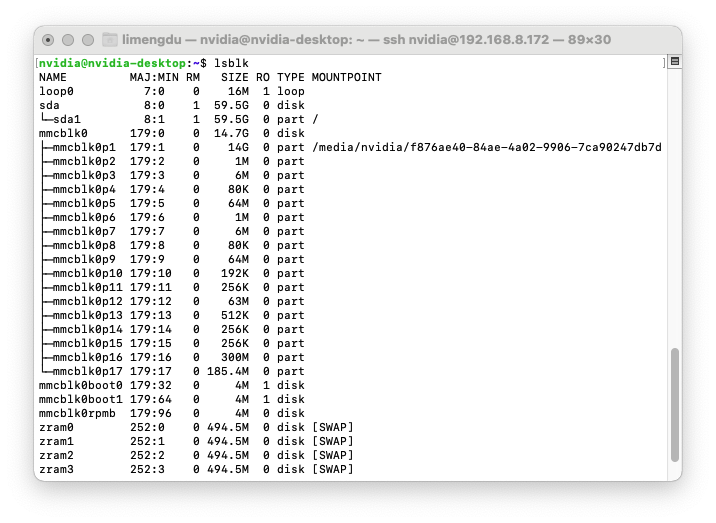


























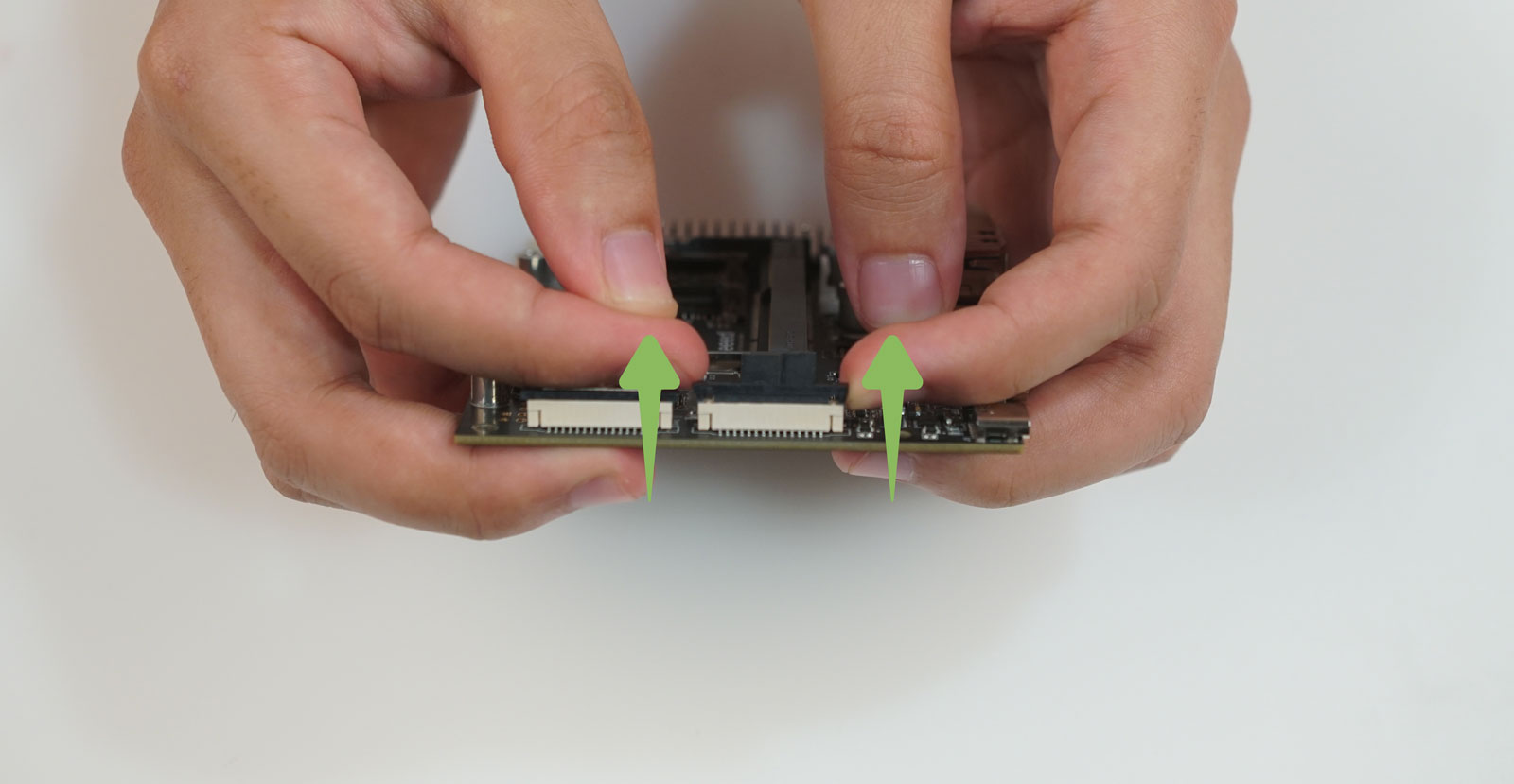
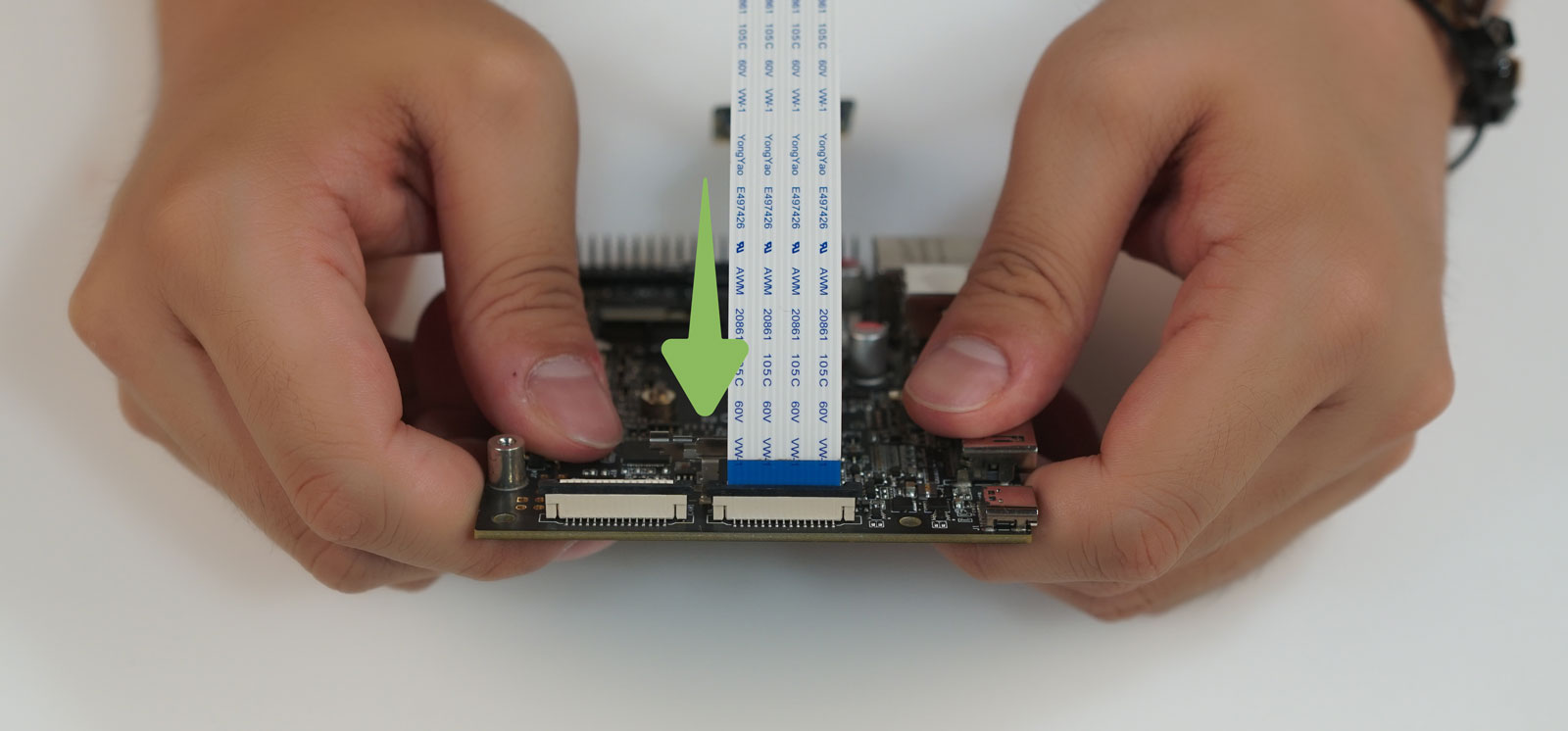

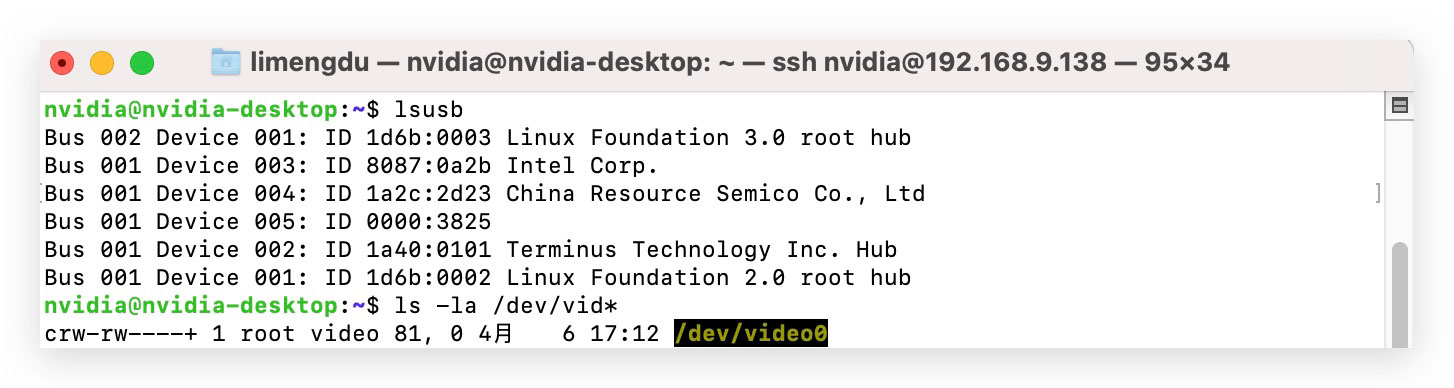
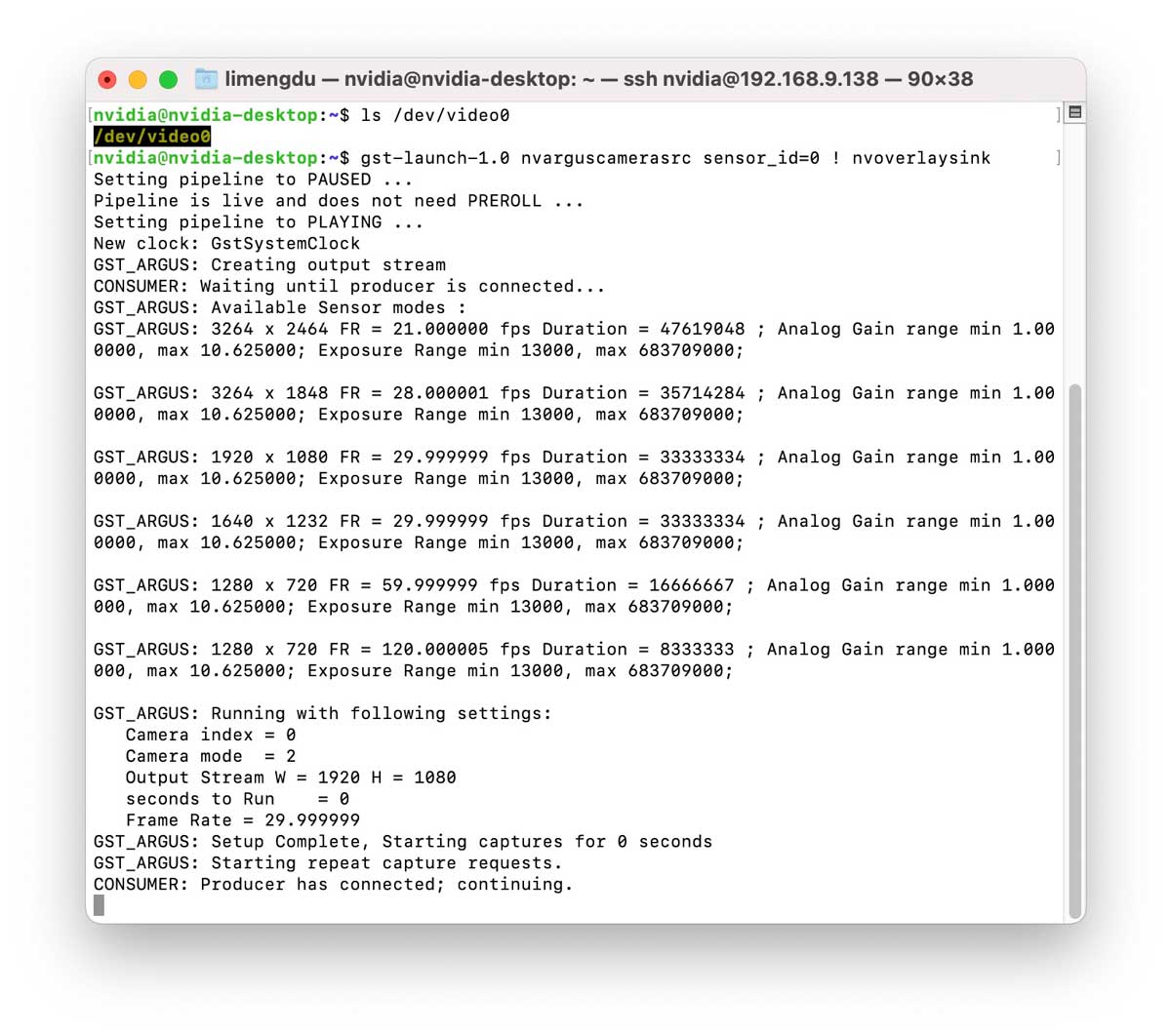































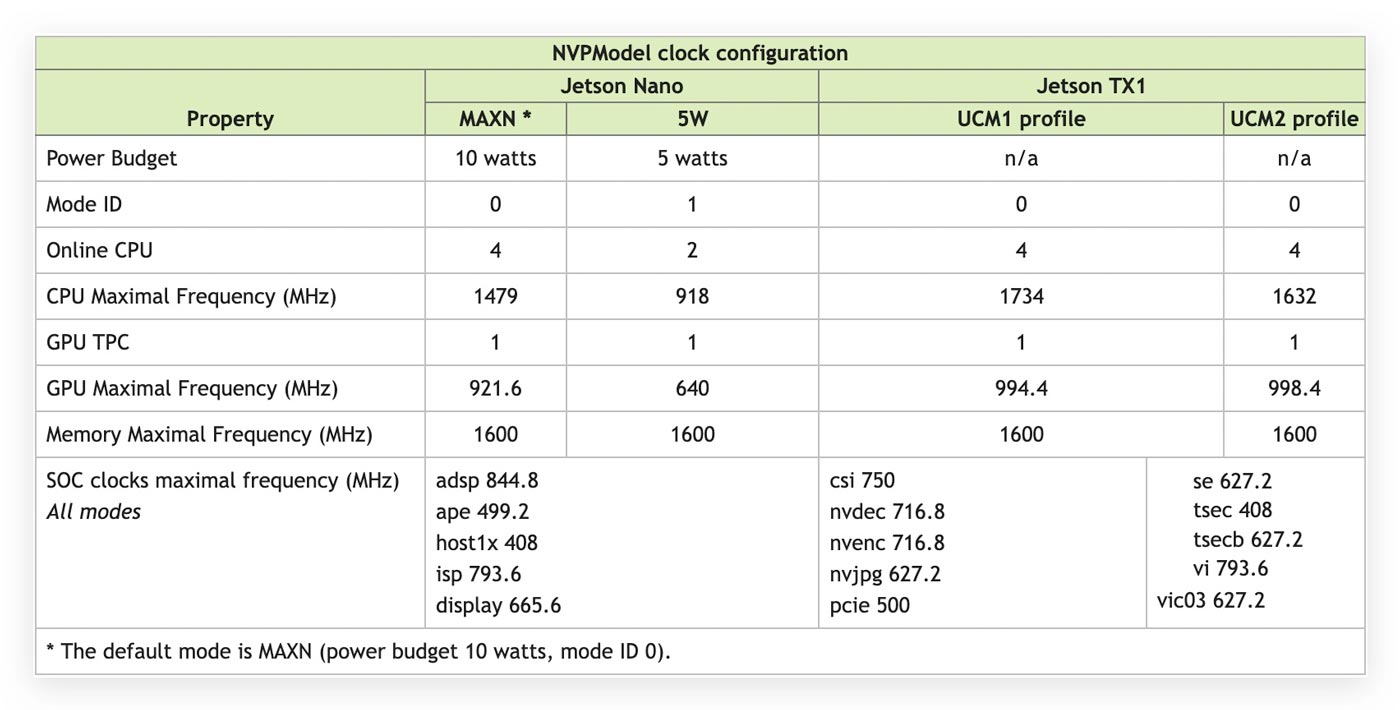


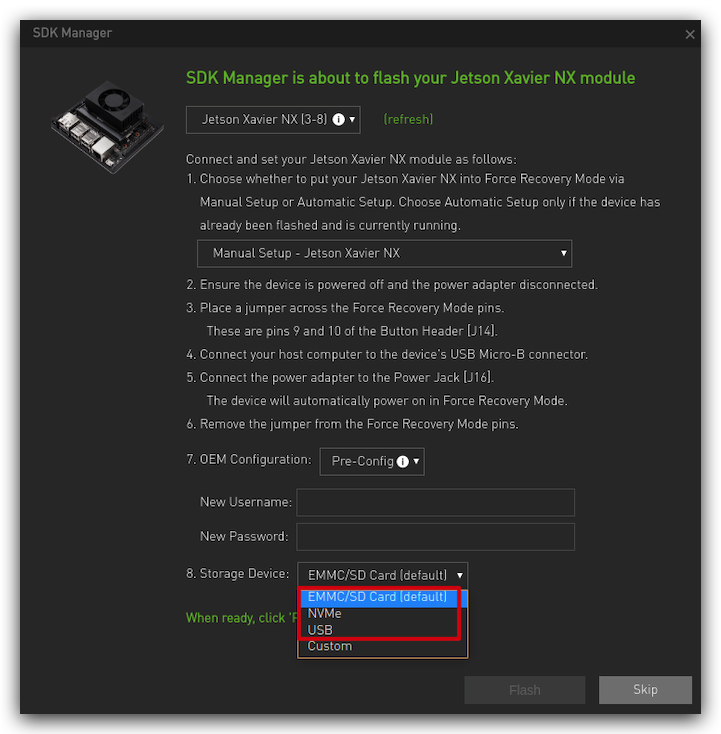
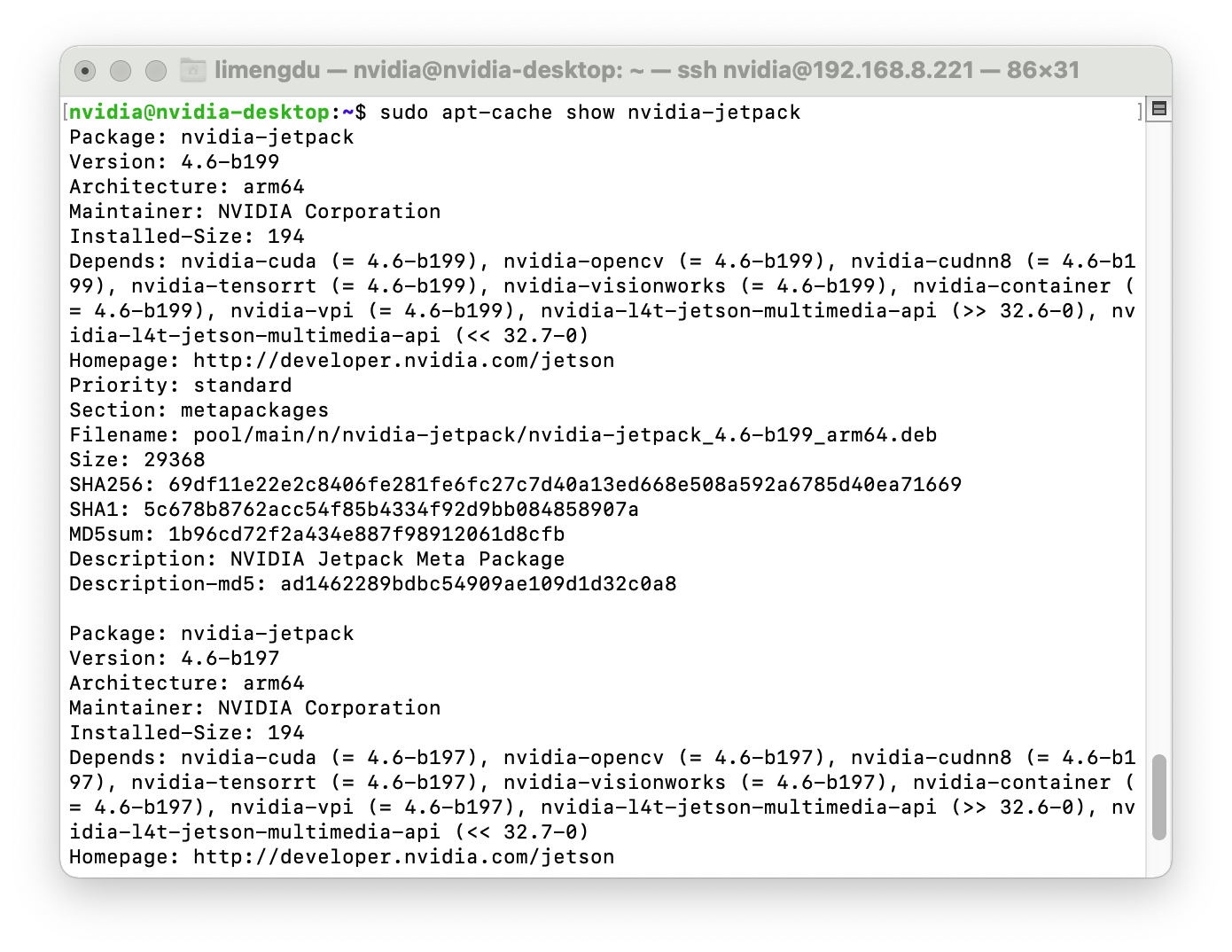
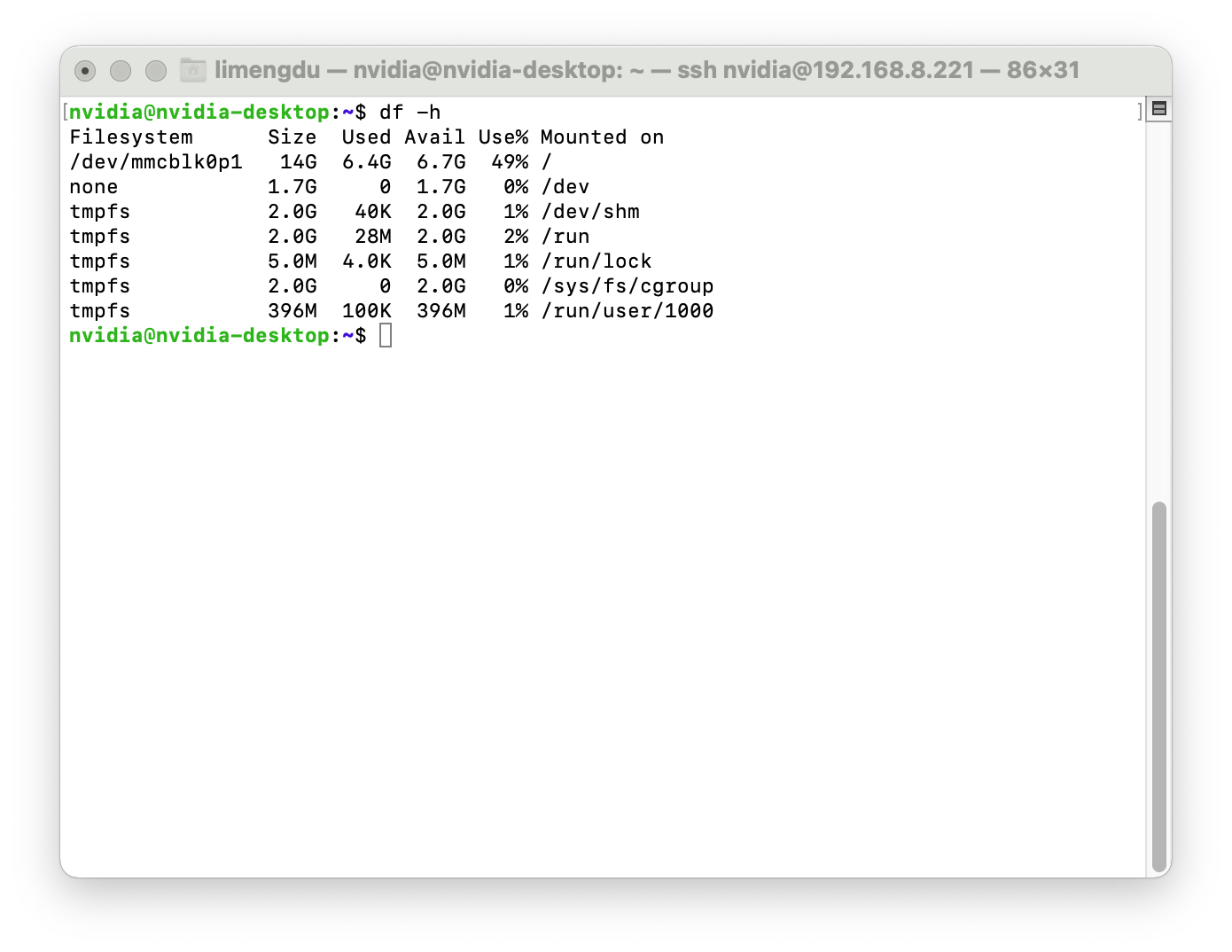

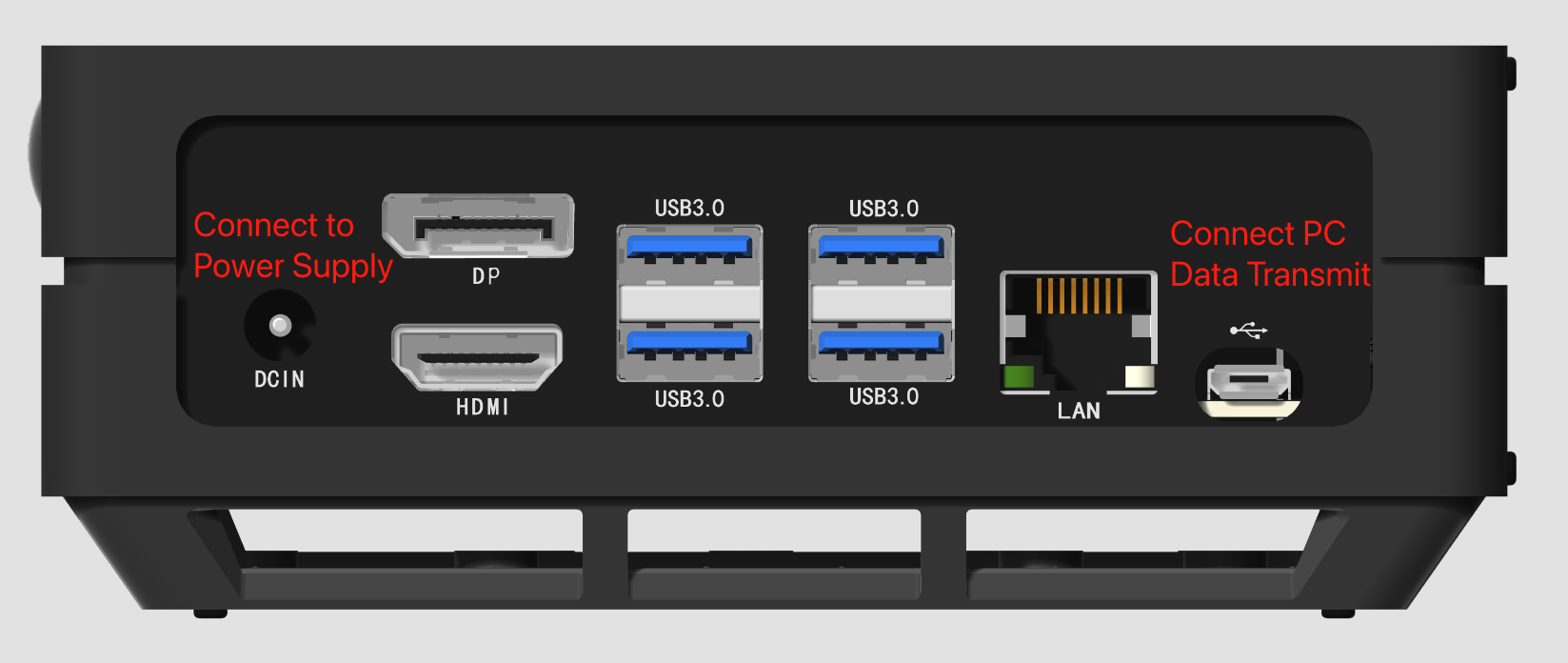
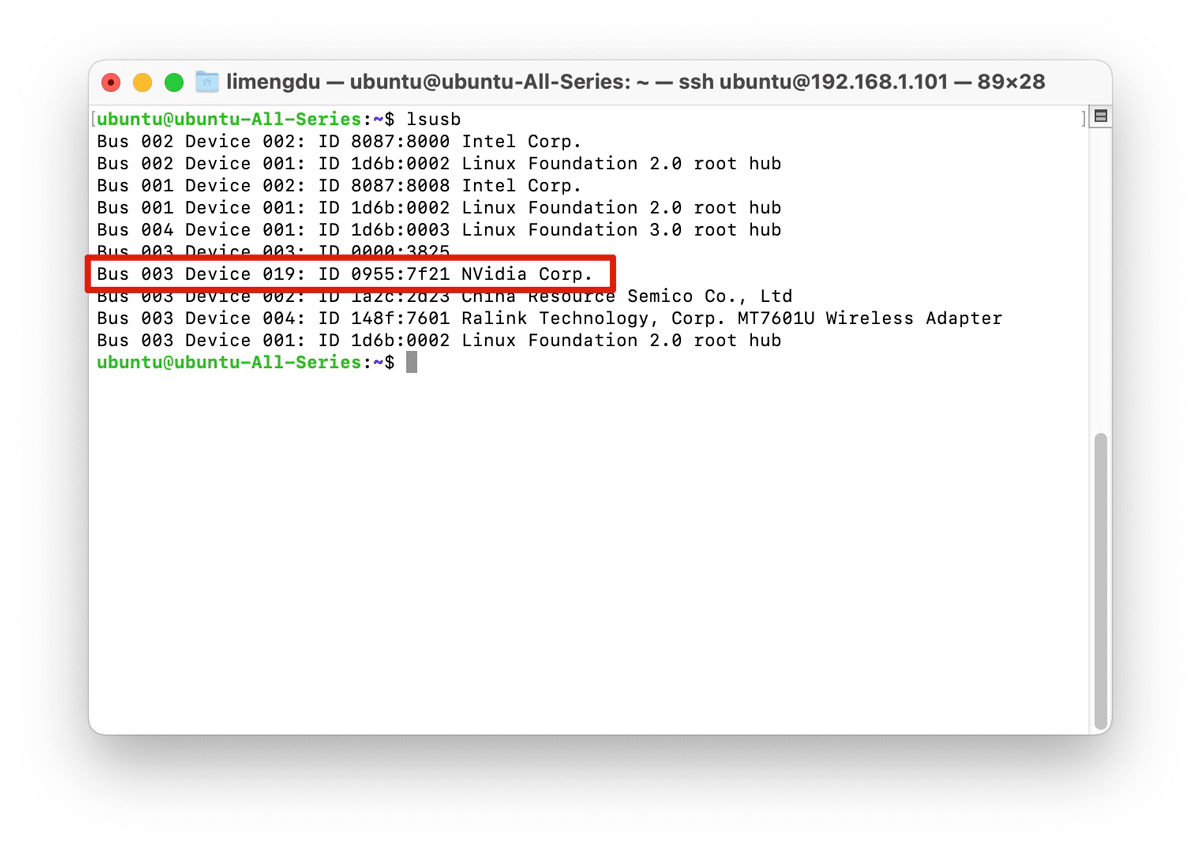
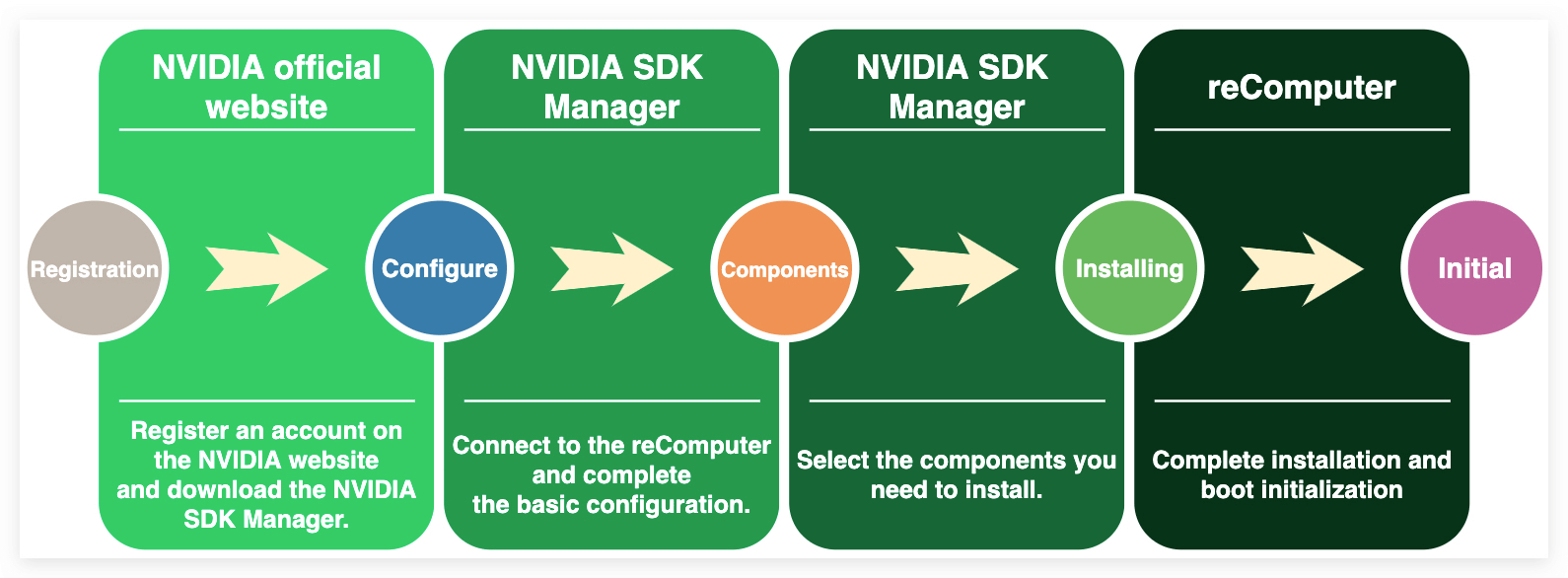
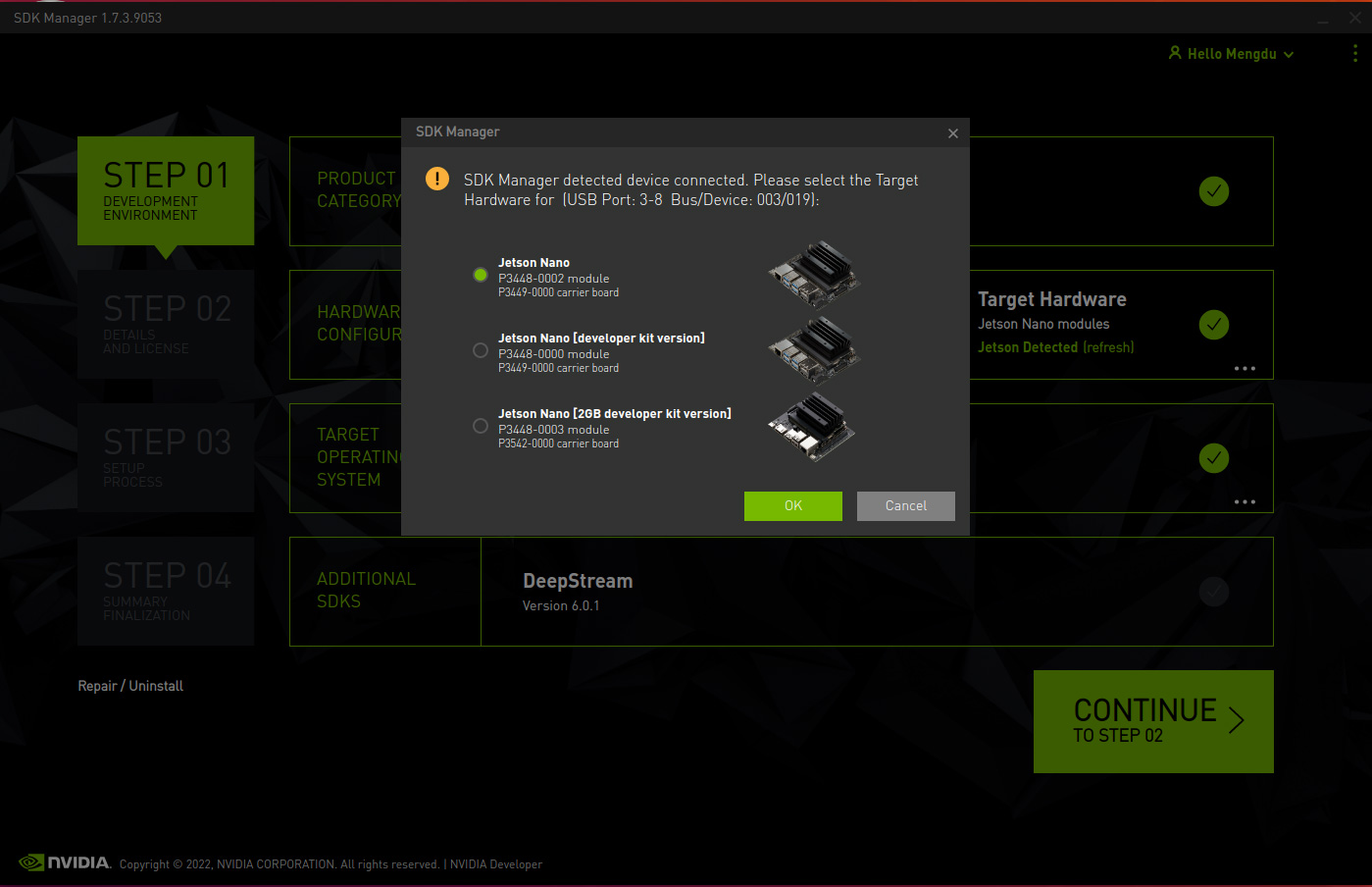
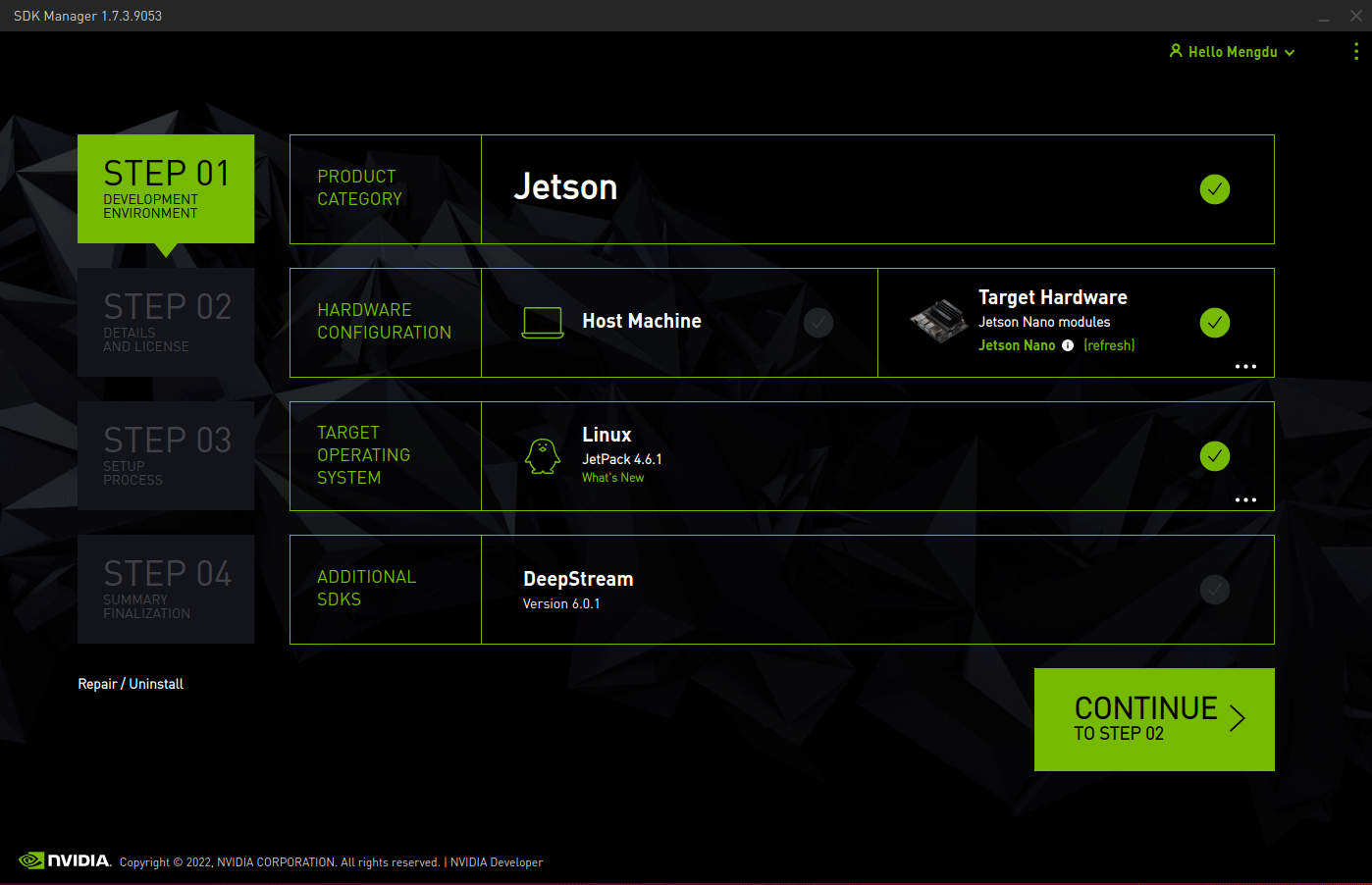
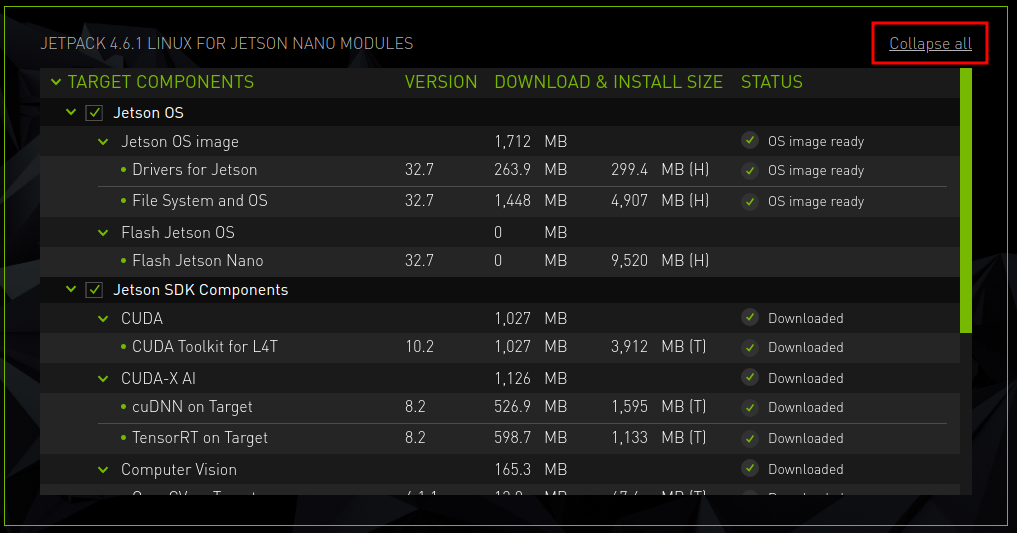
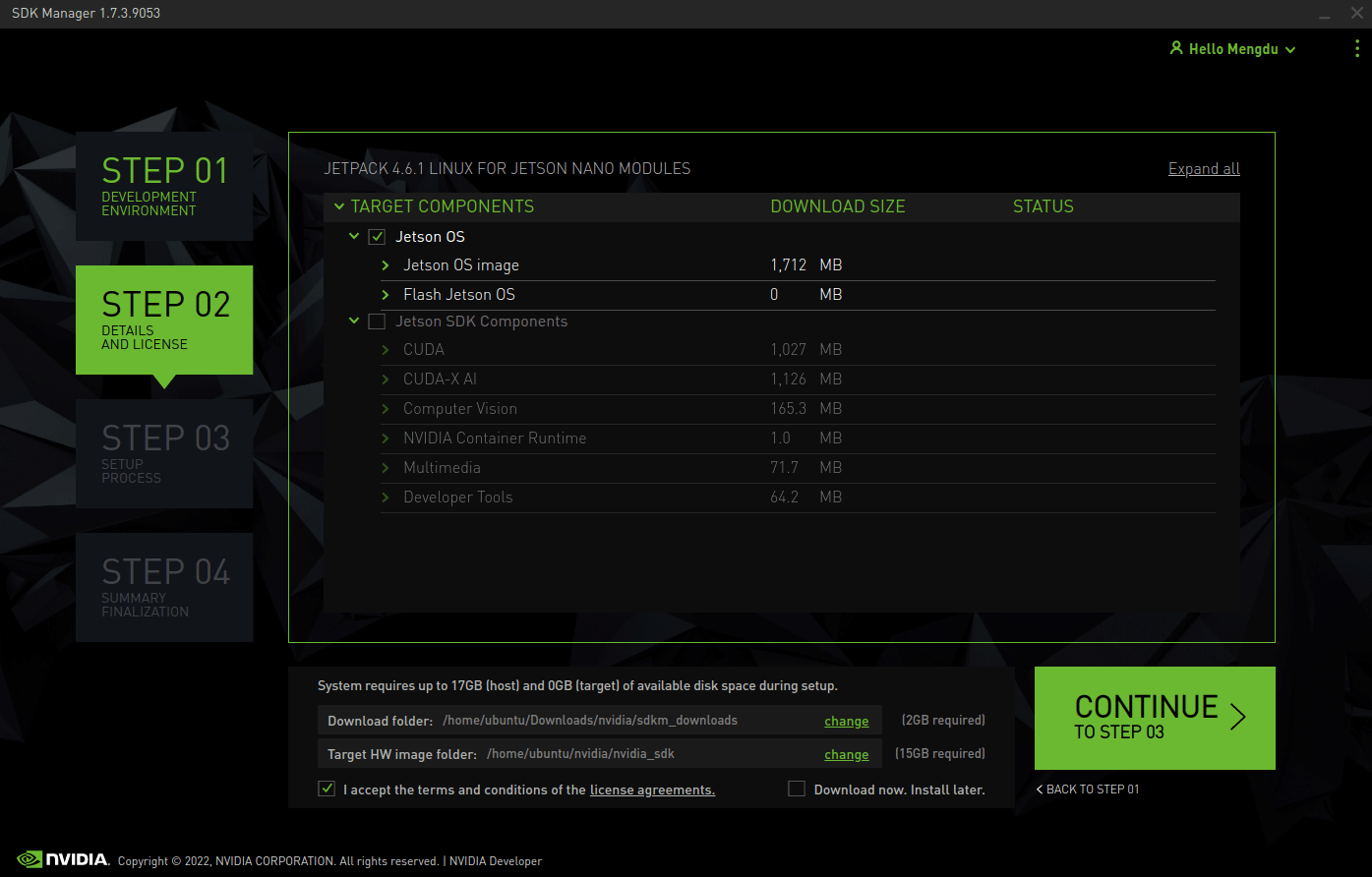

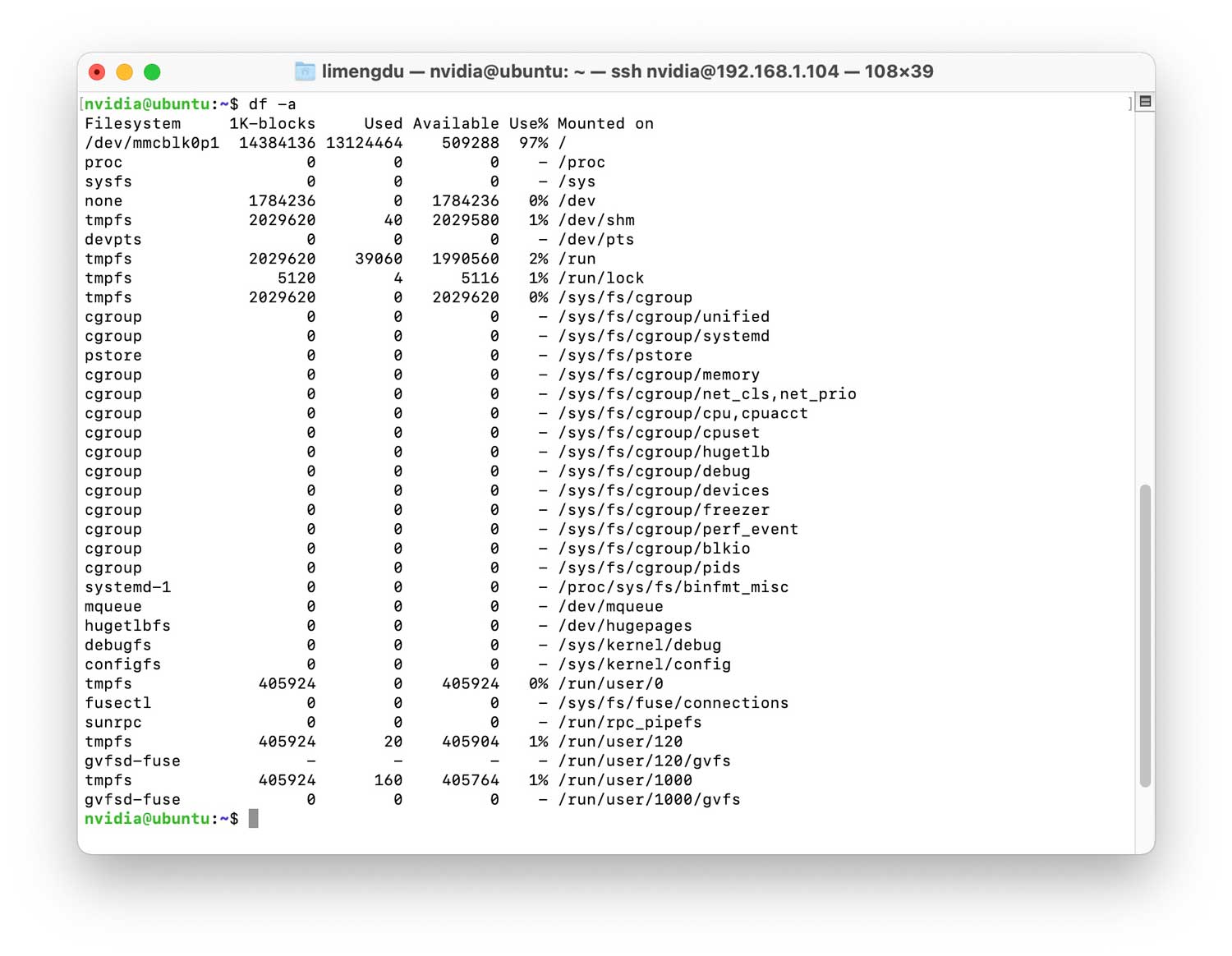
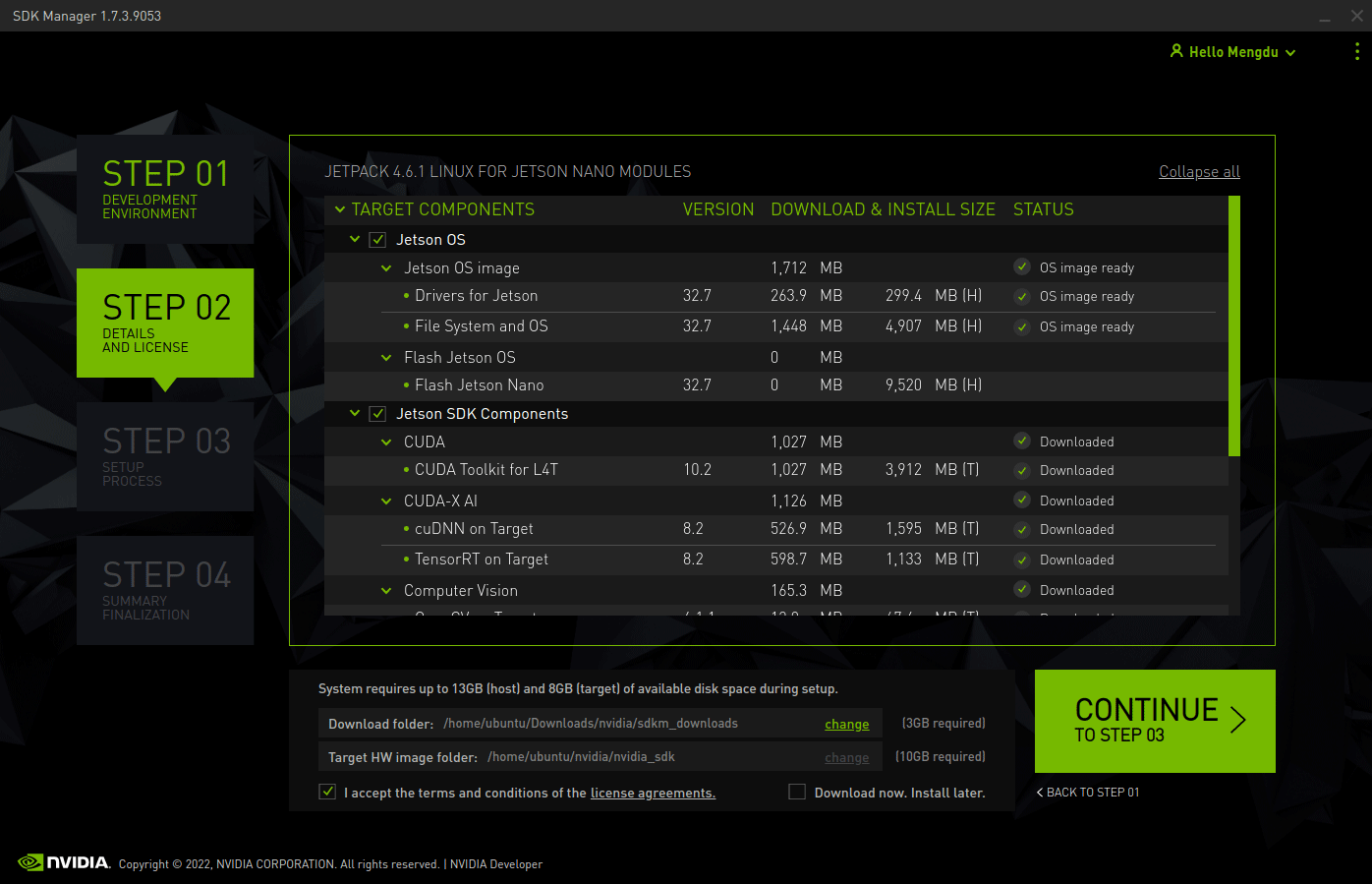
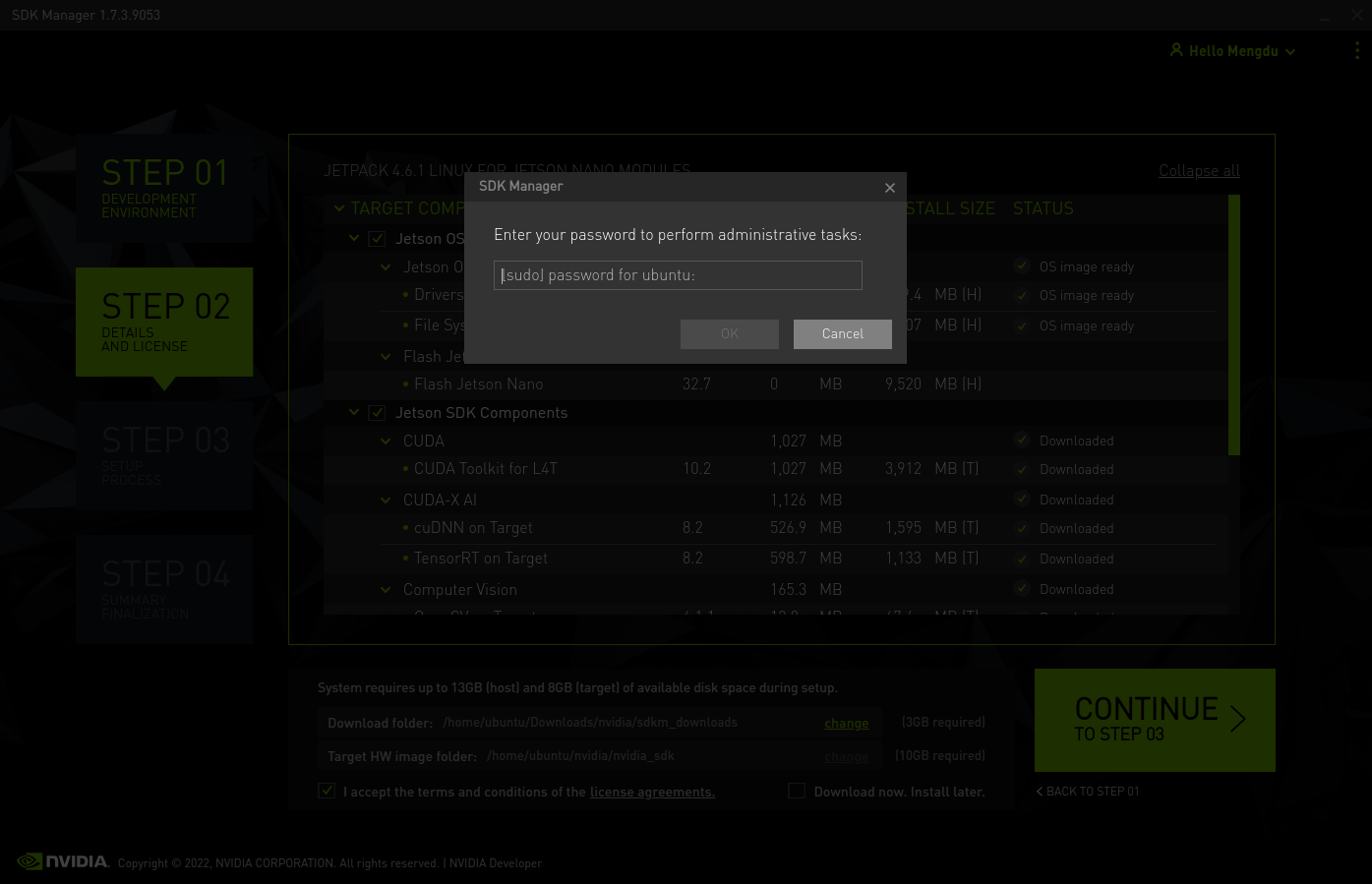
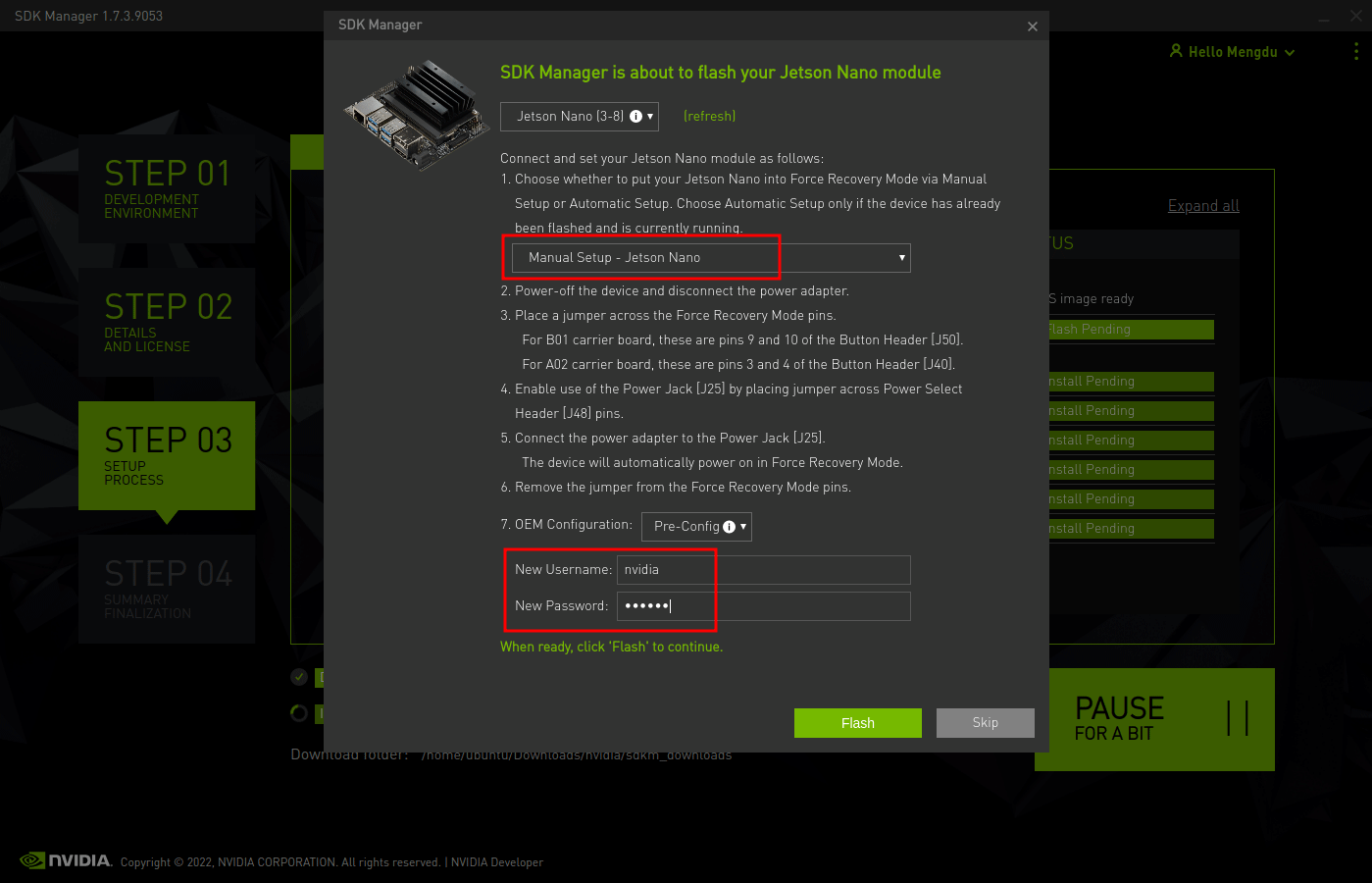
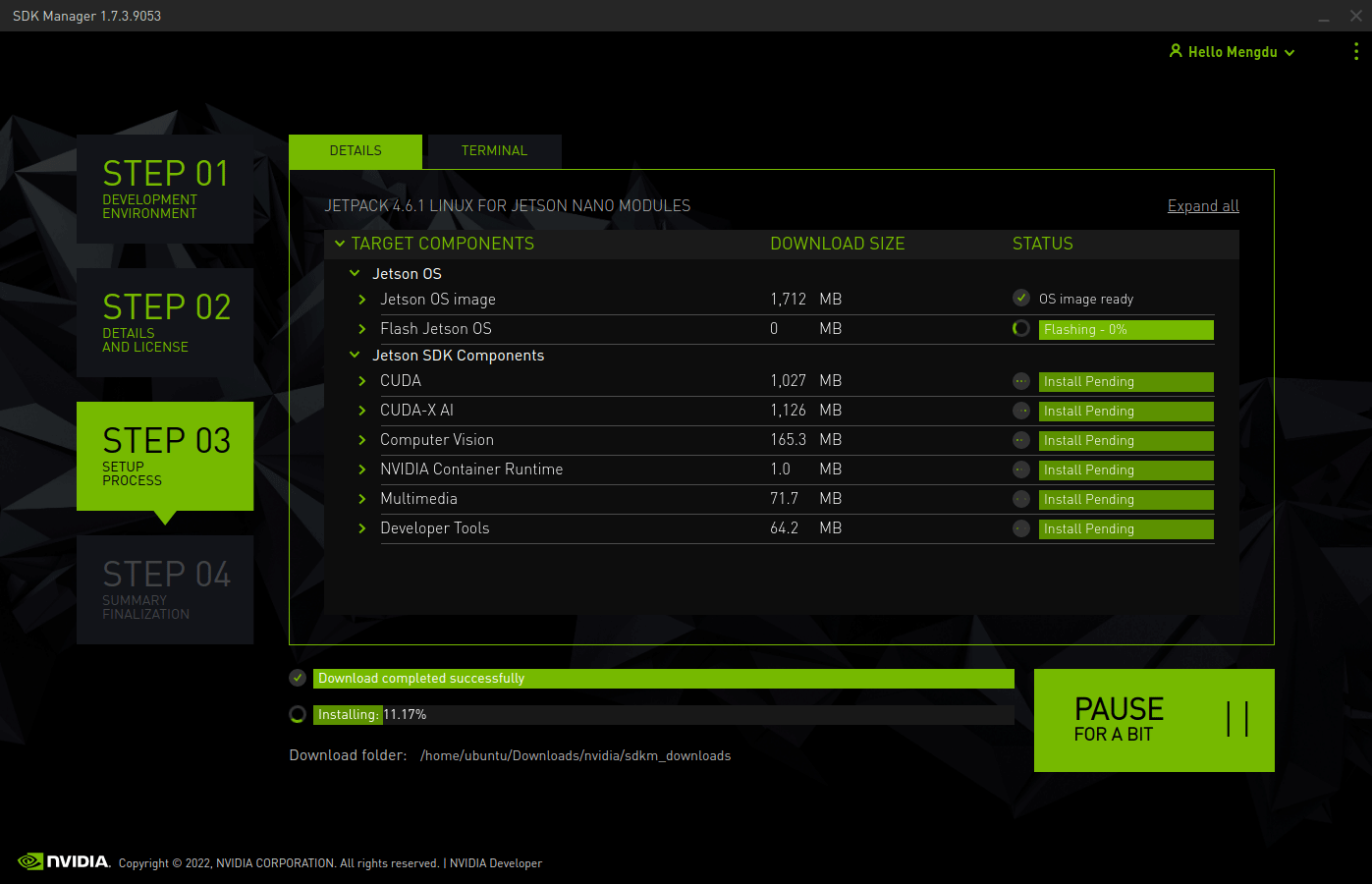
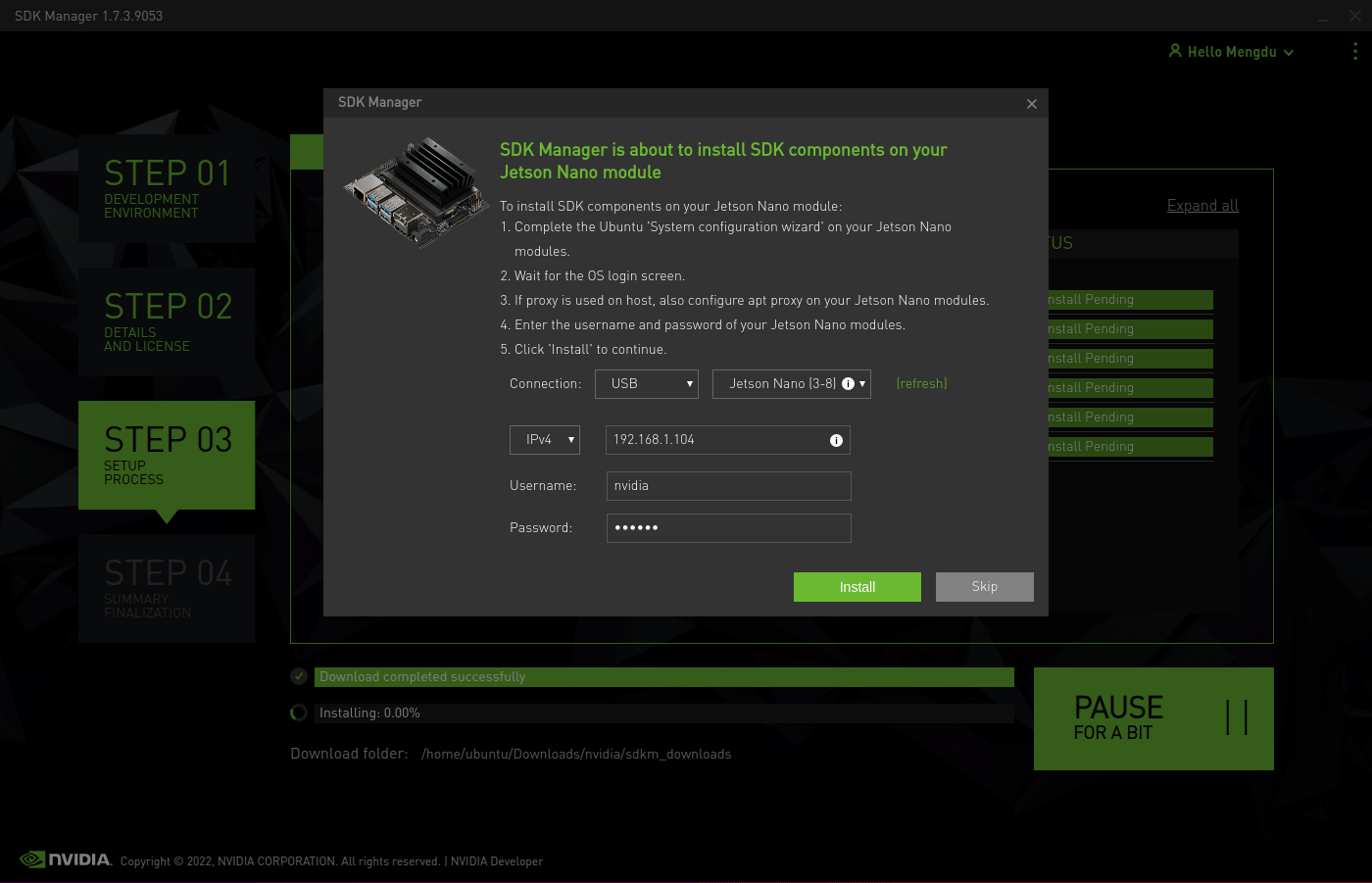
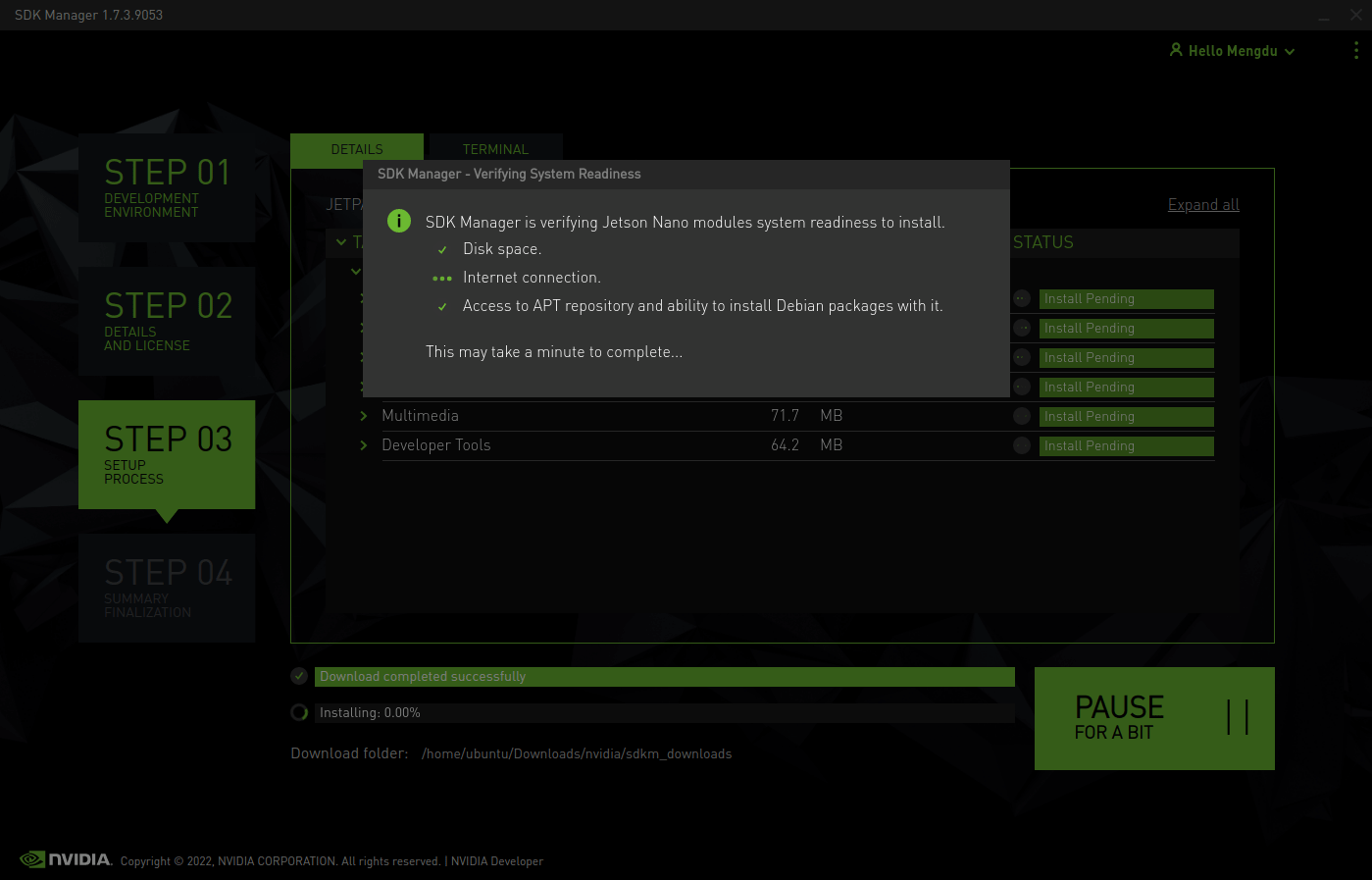
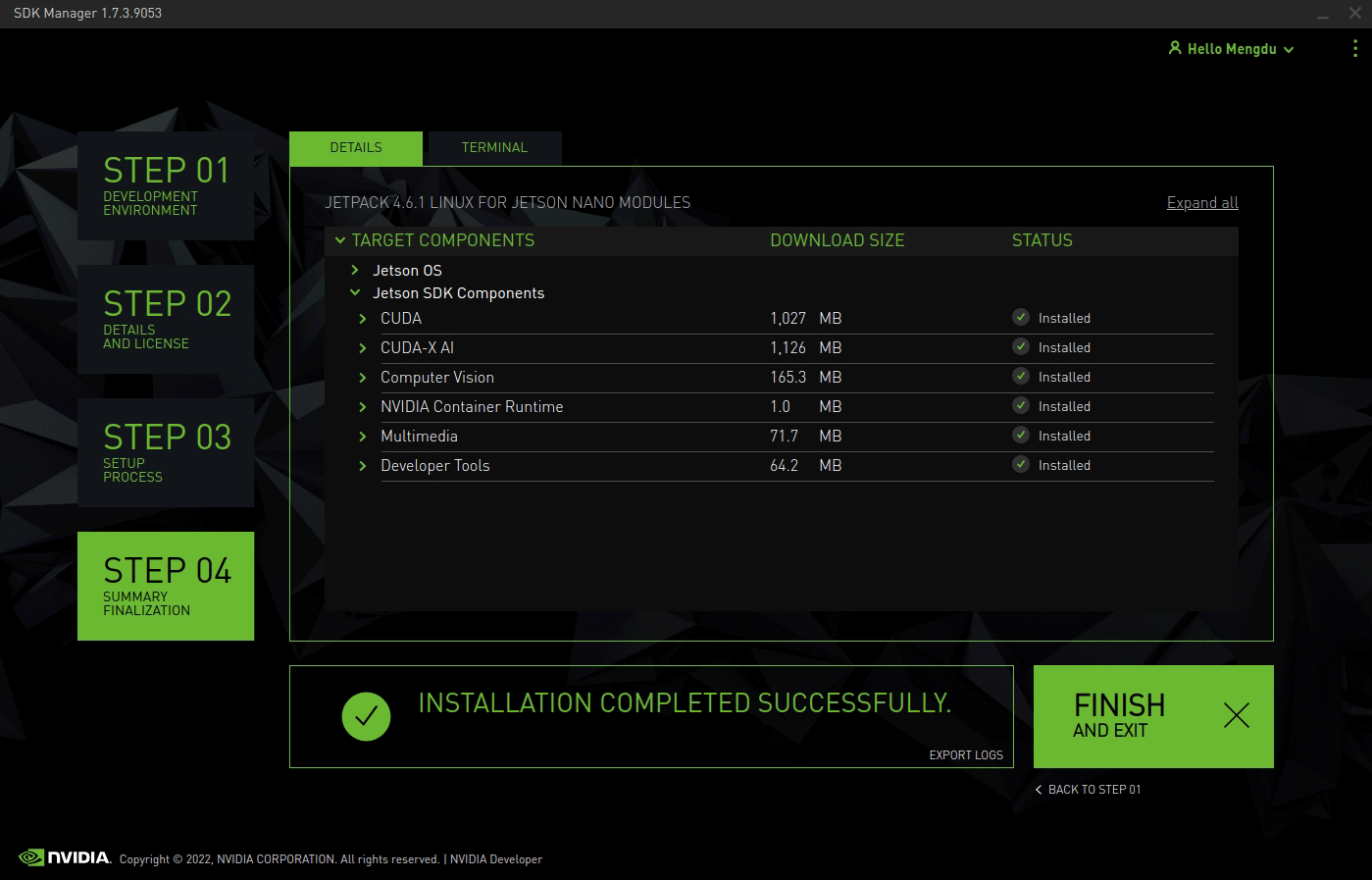
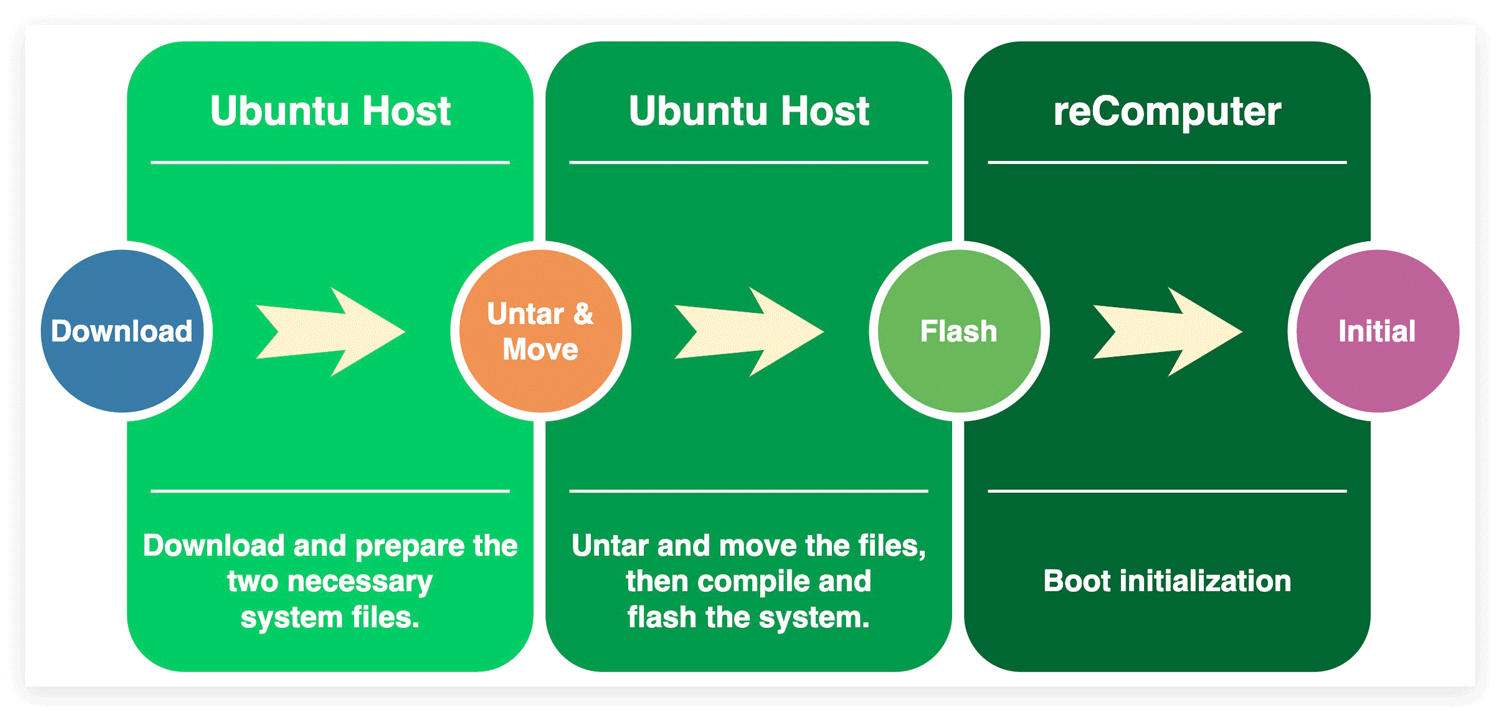

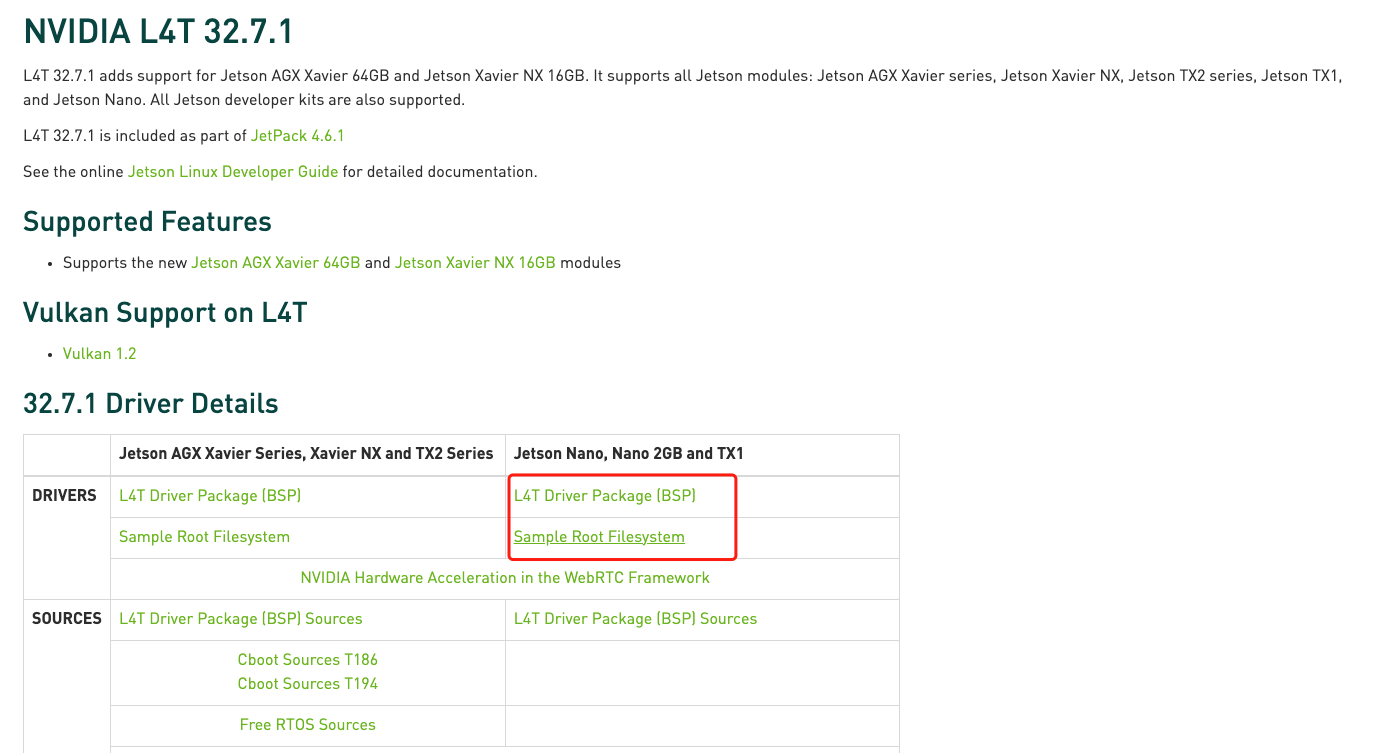
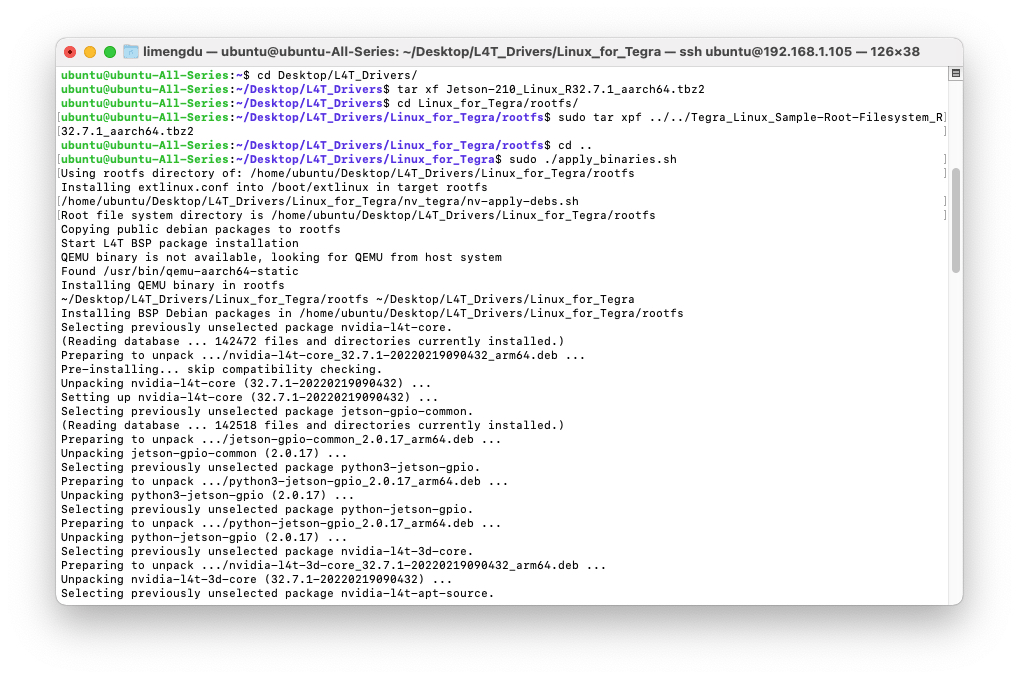
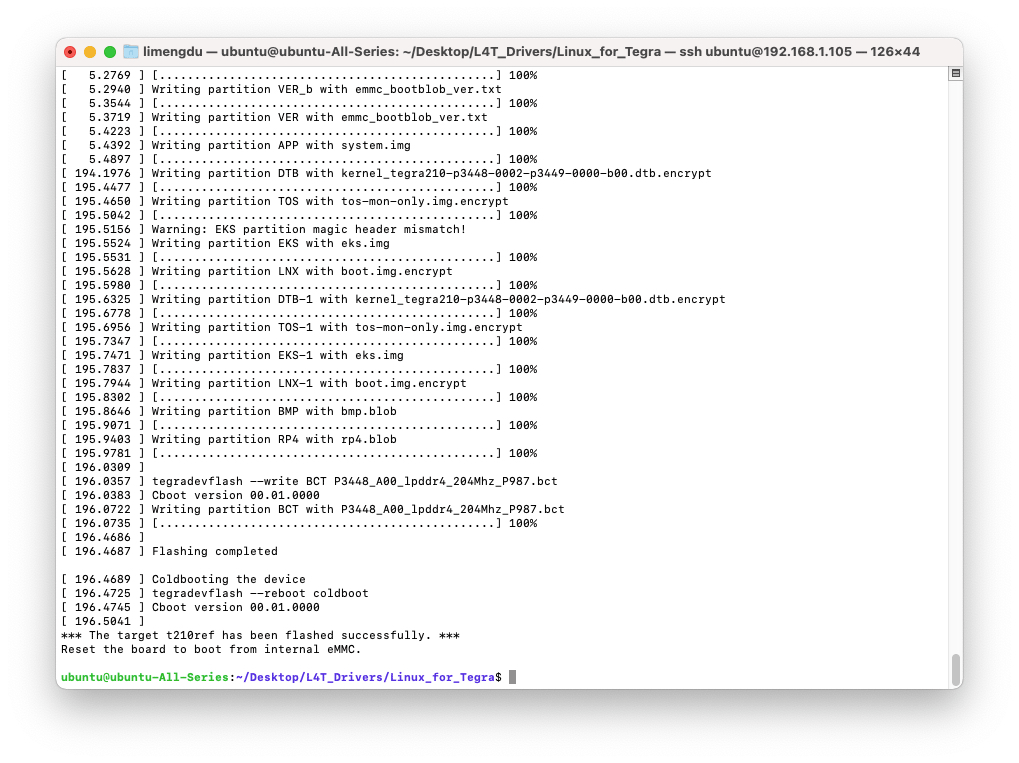
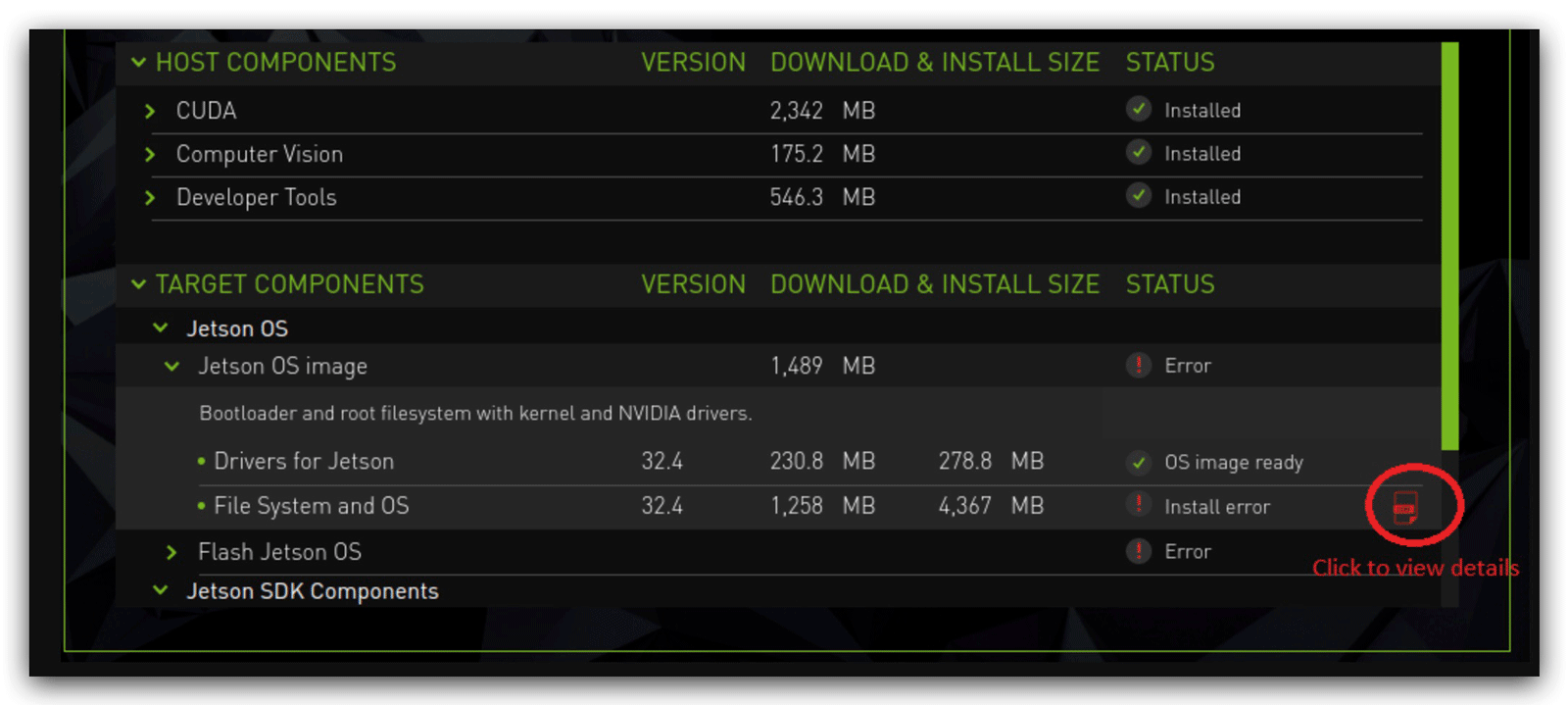

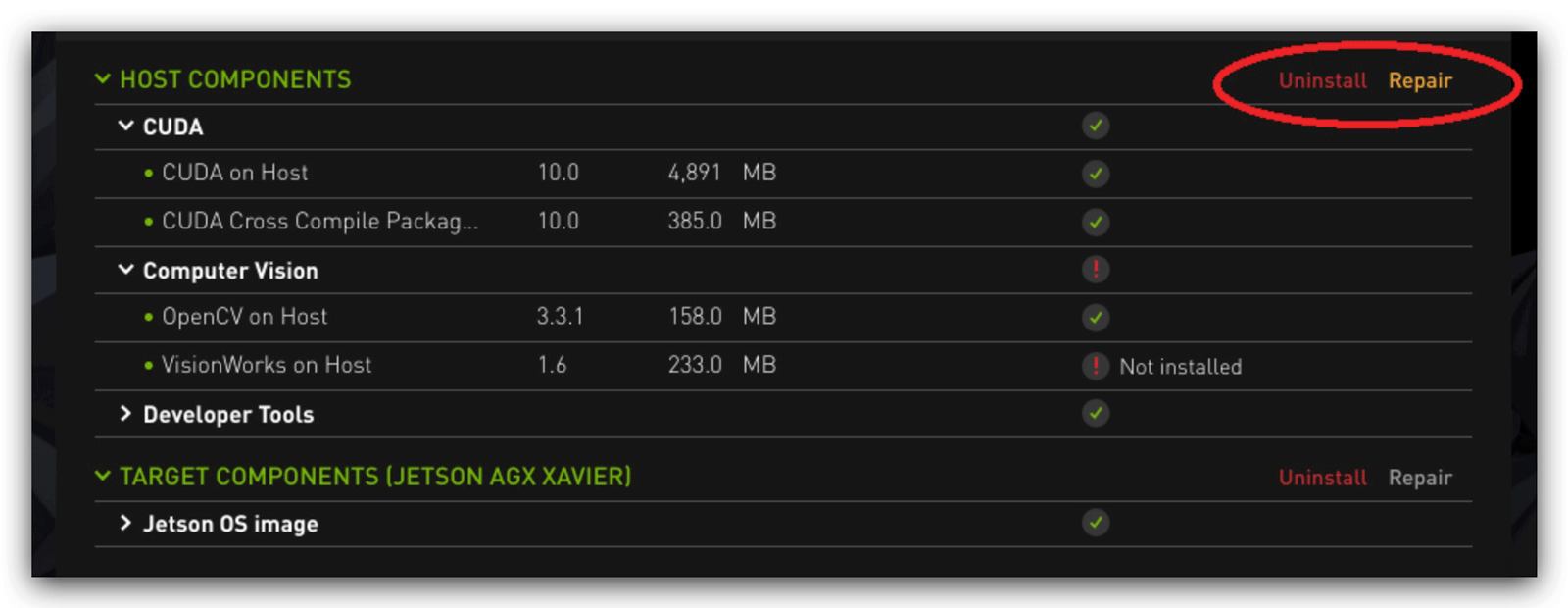

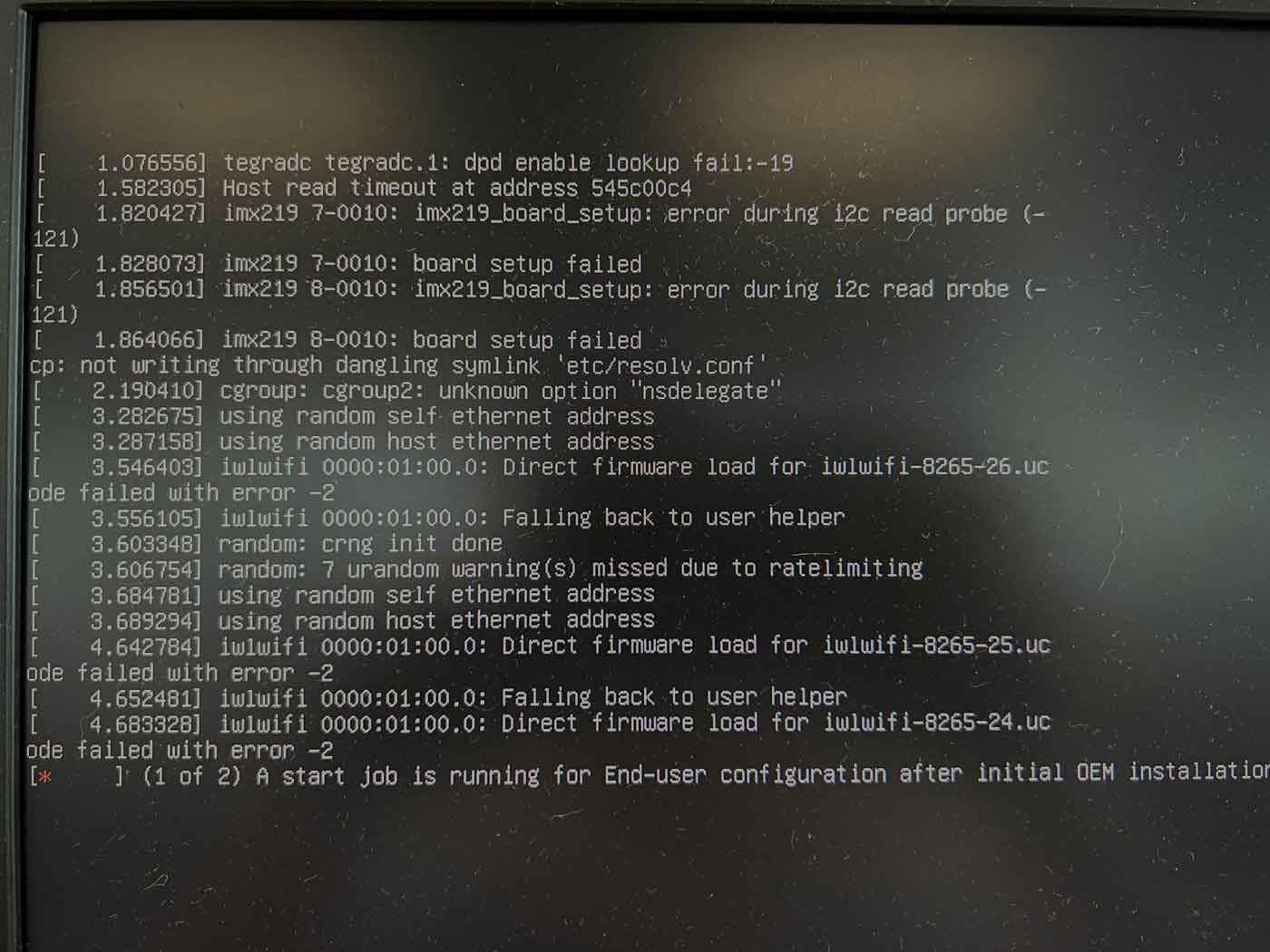
 |
|








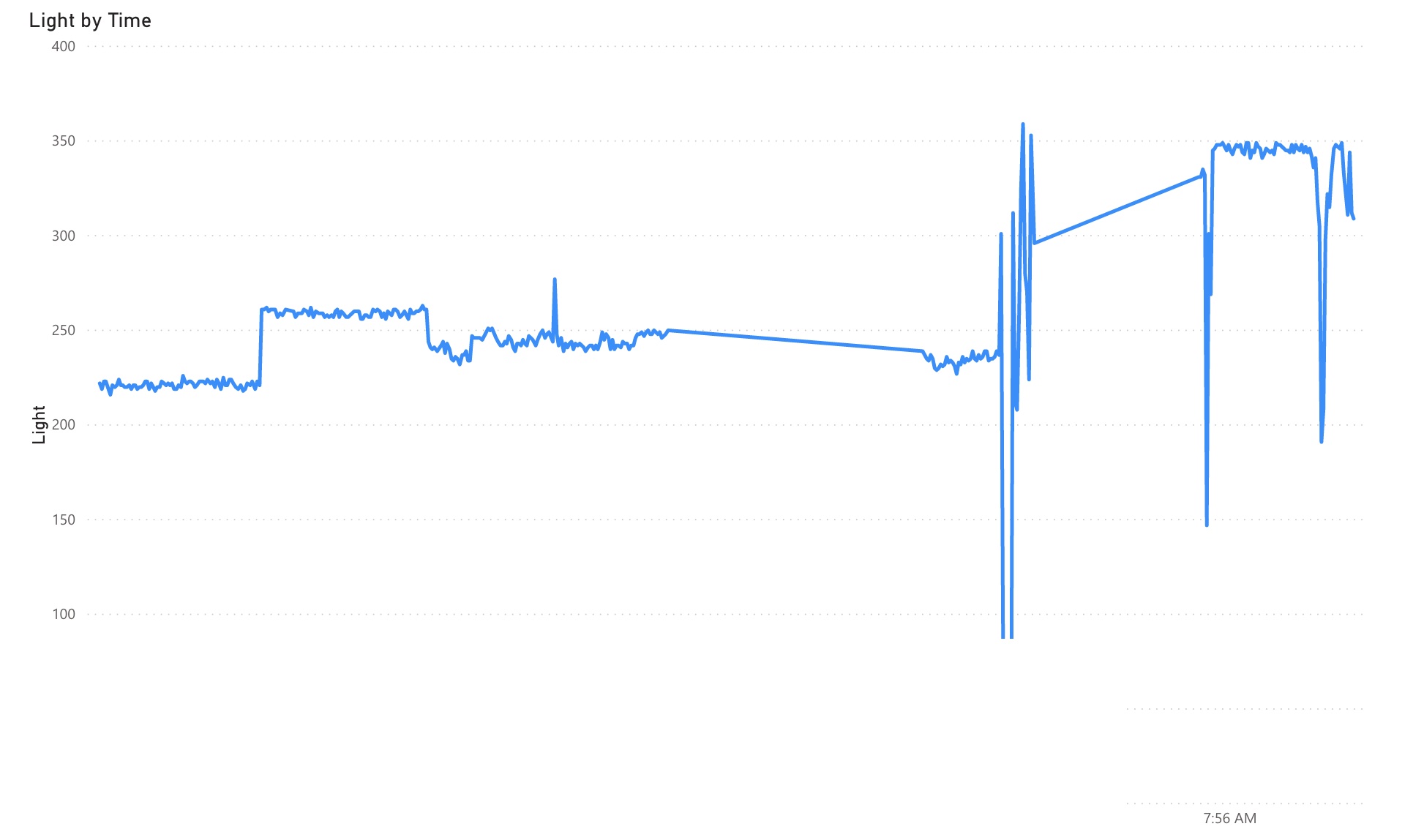
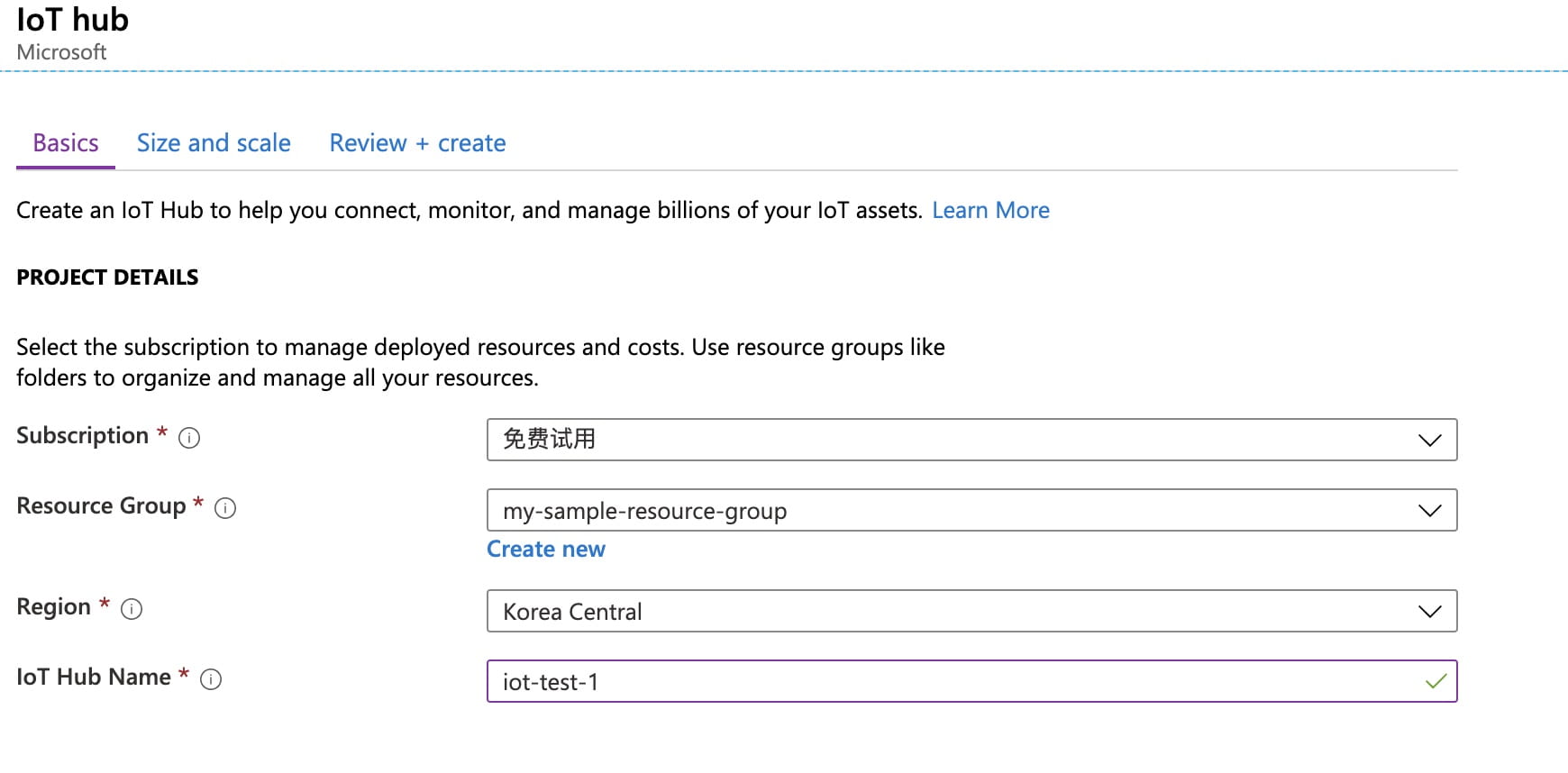
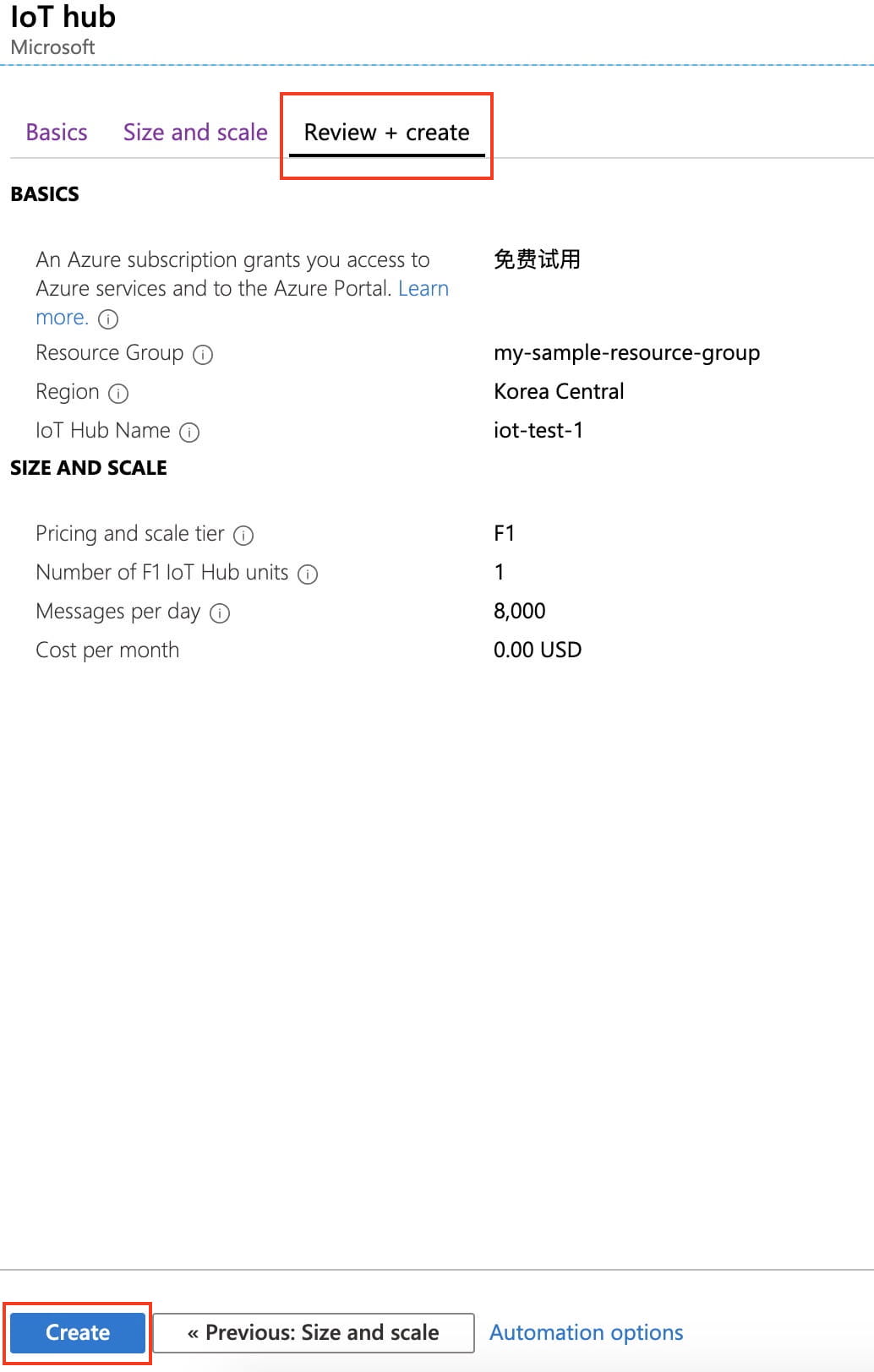
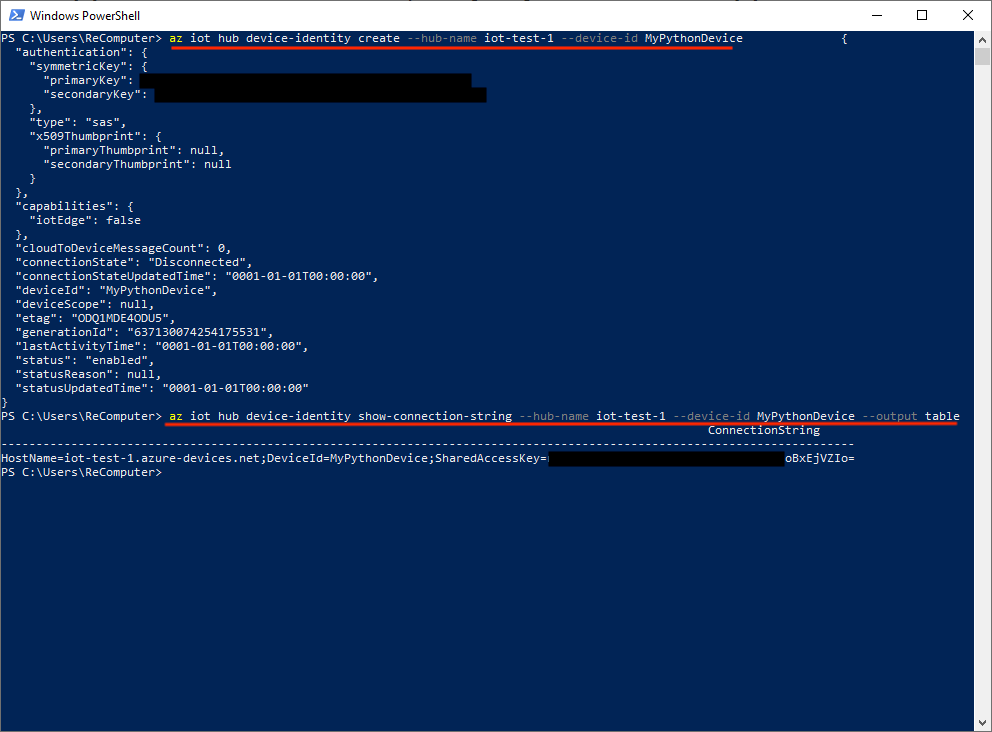
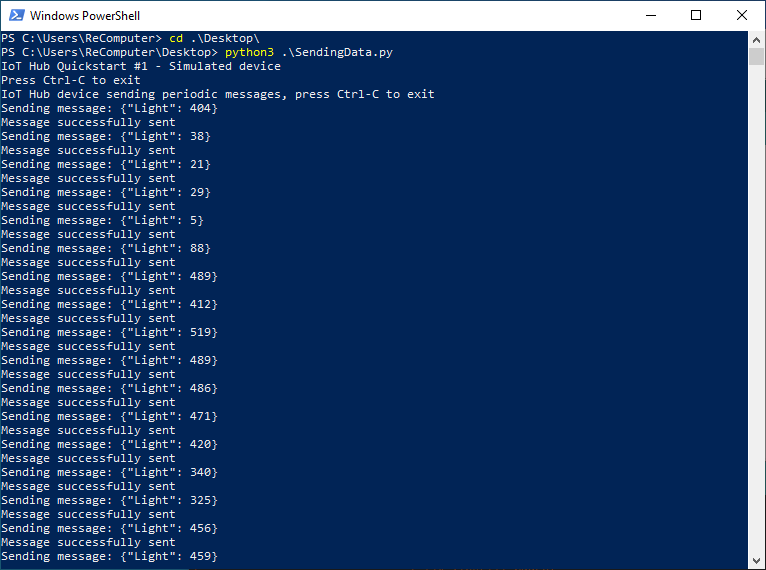
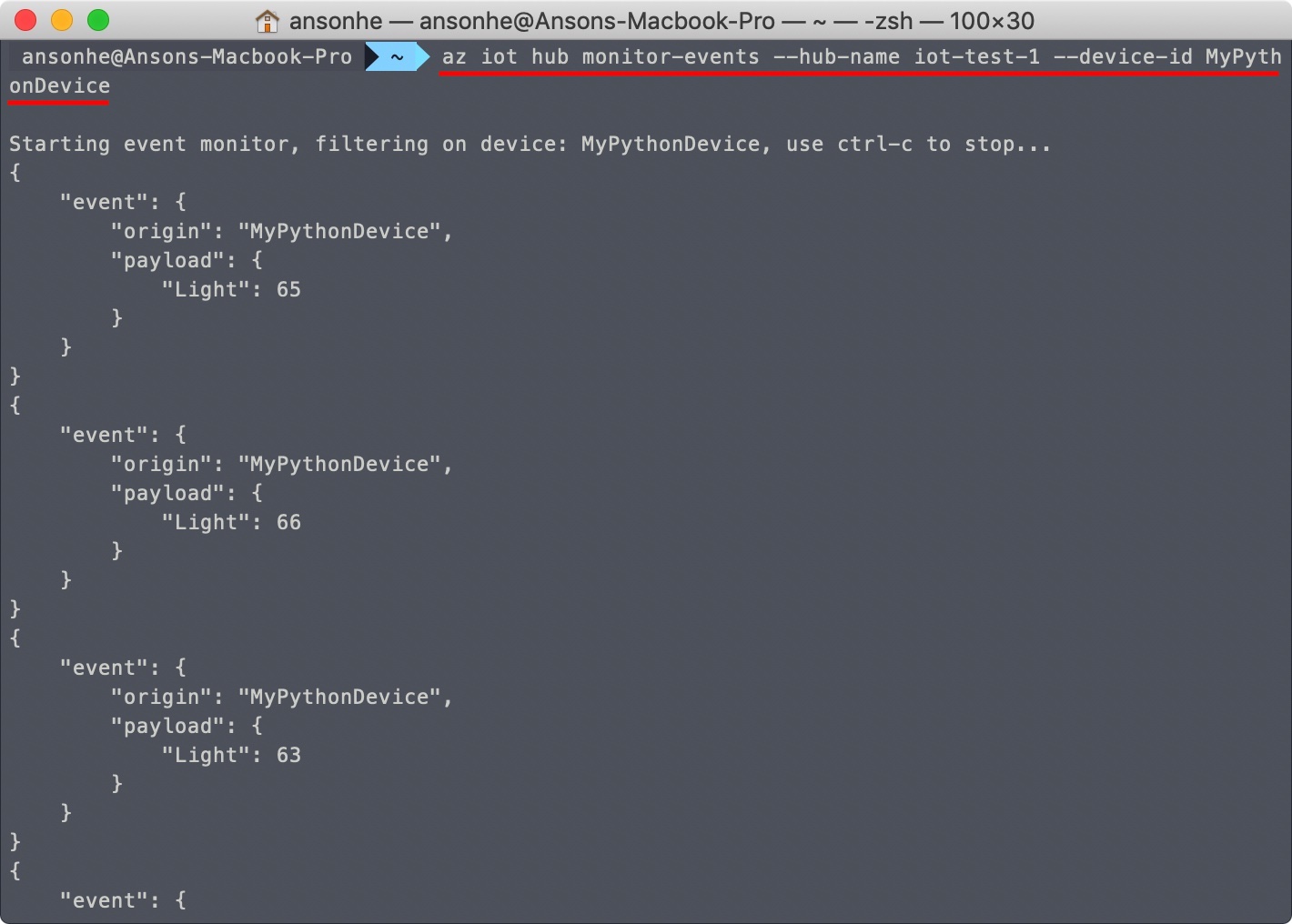
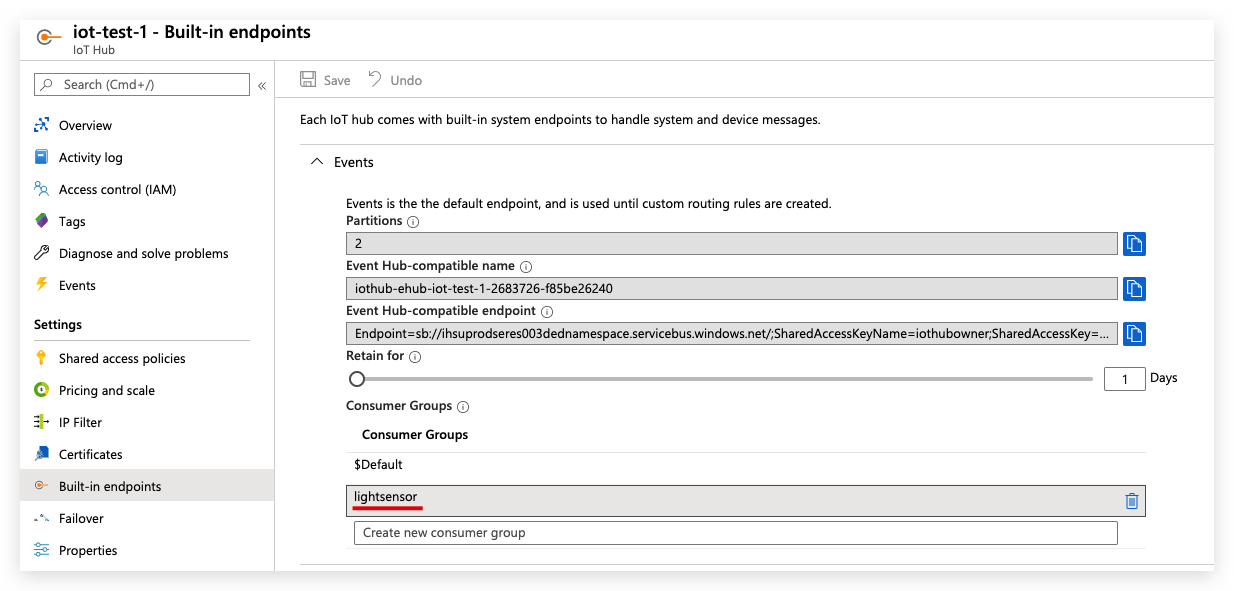
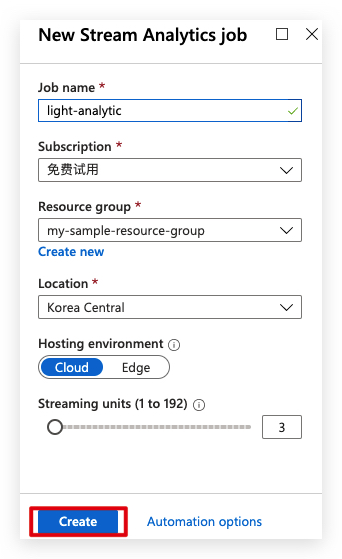
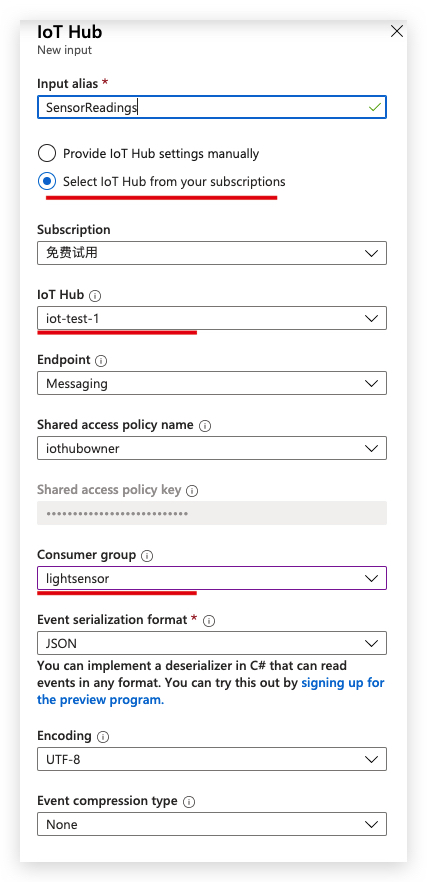
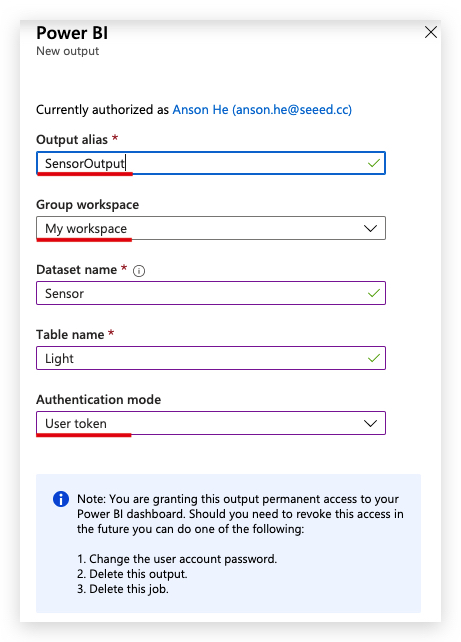
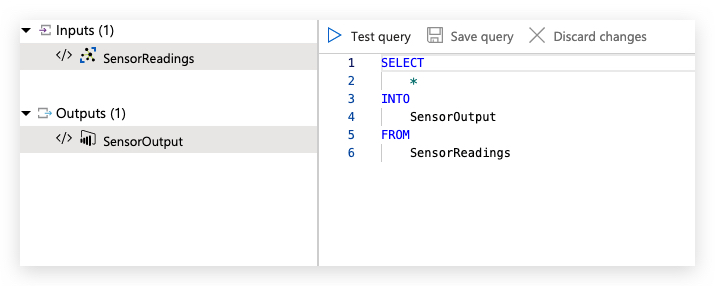

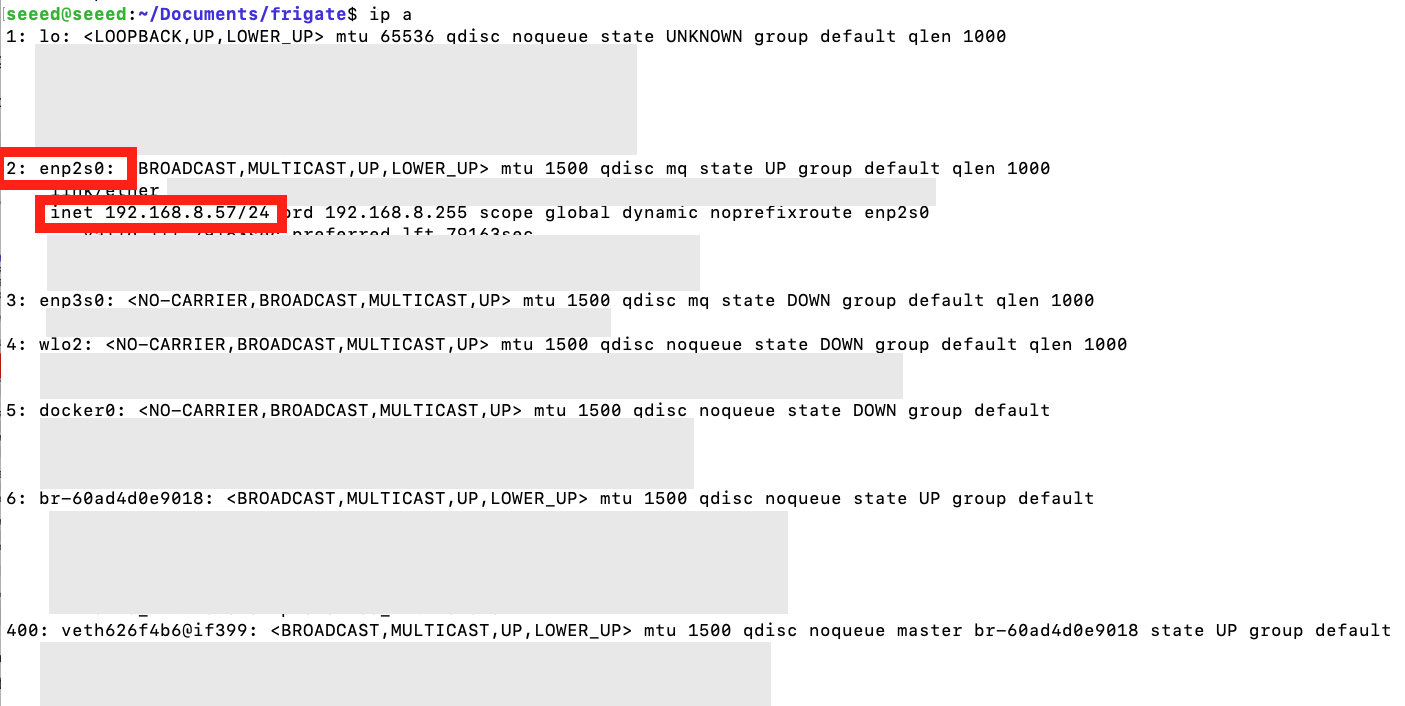
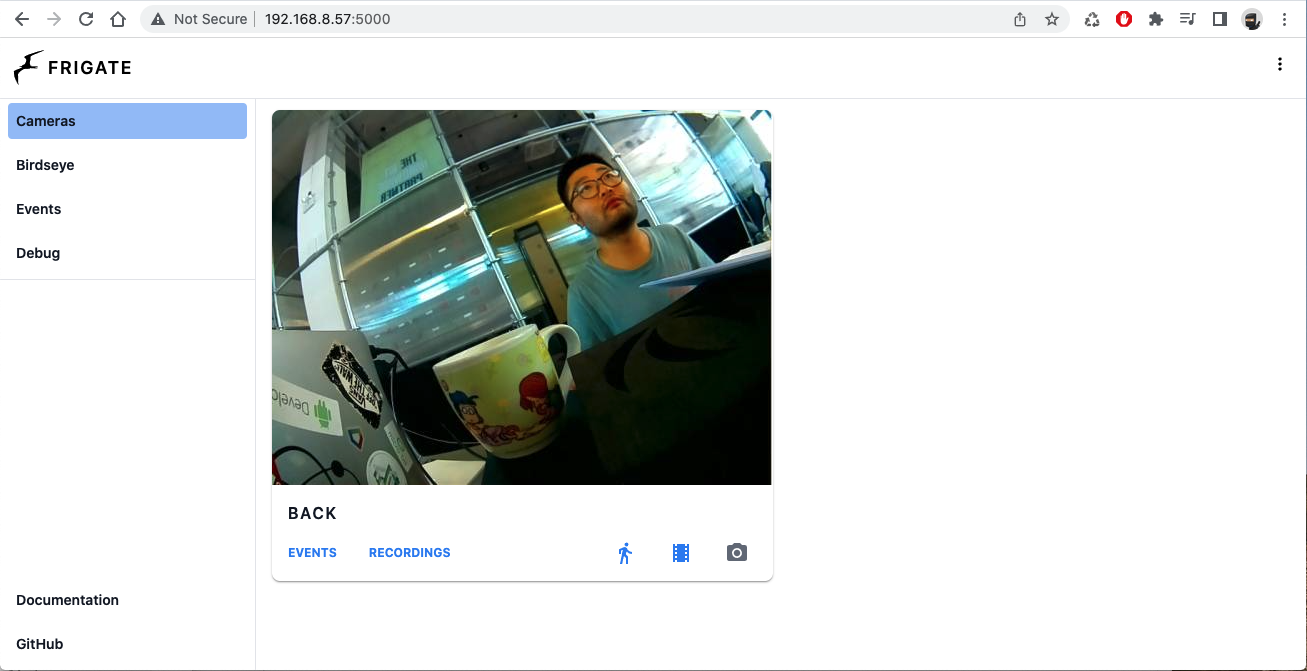
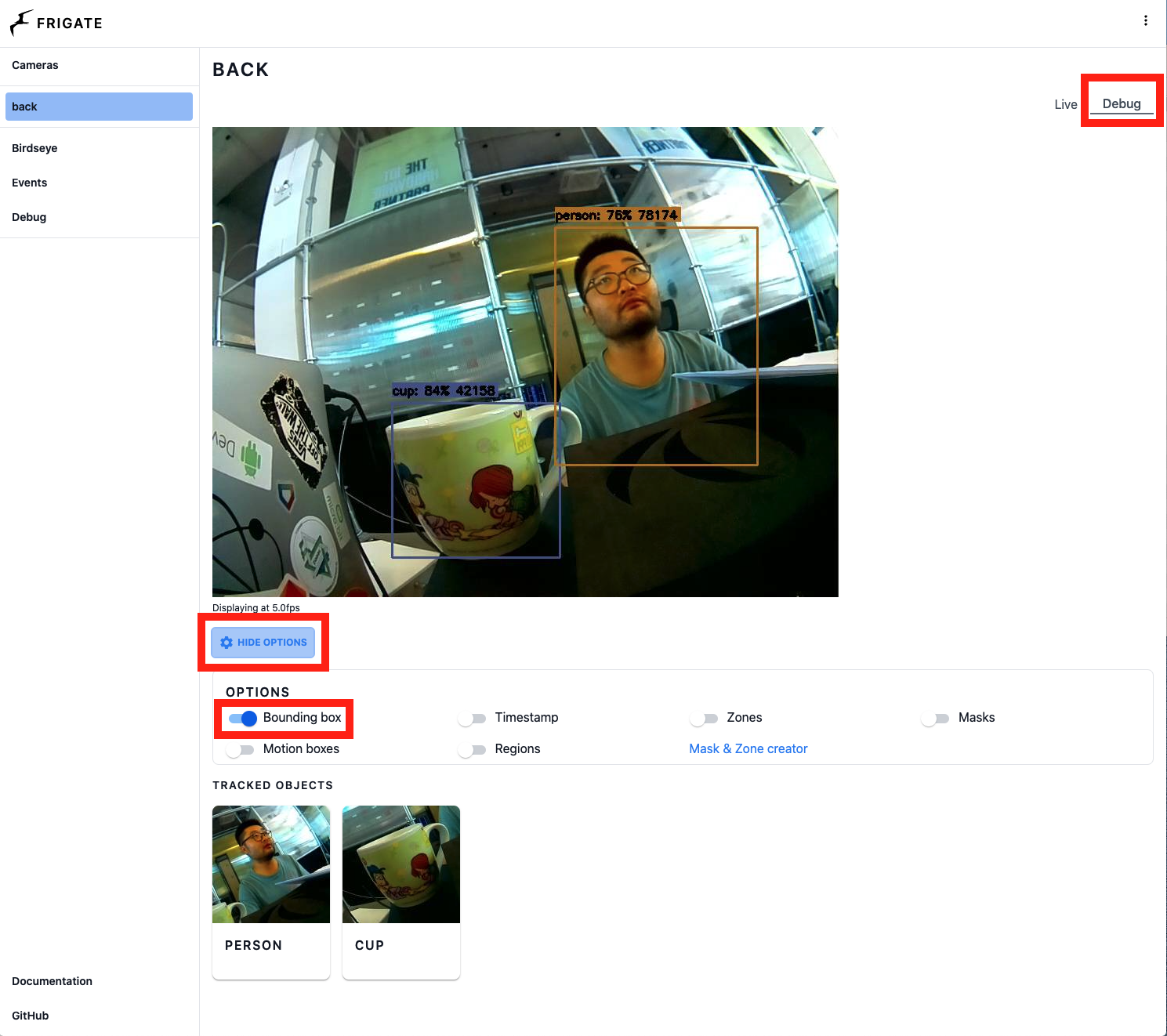

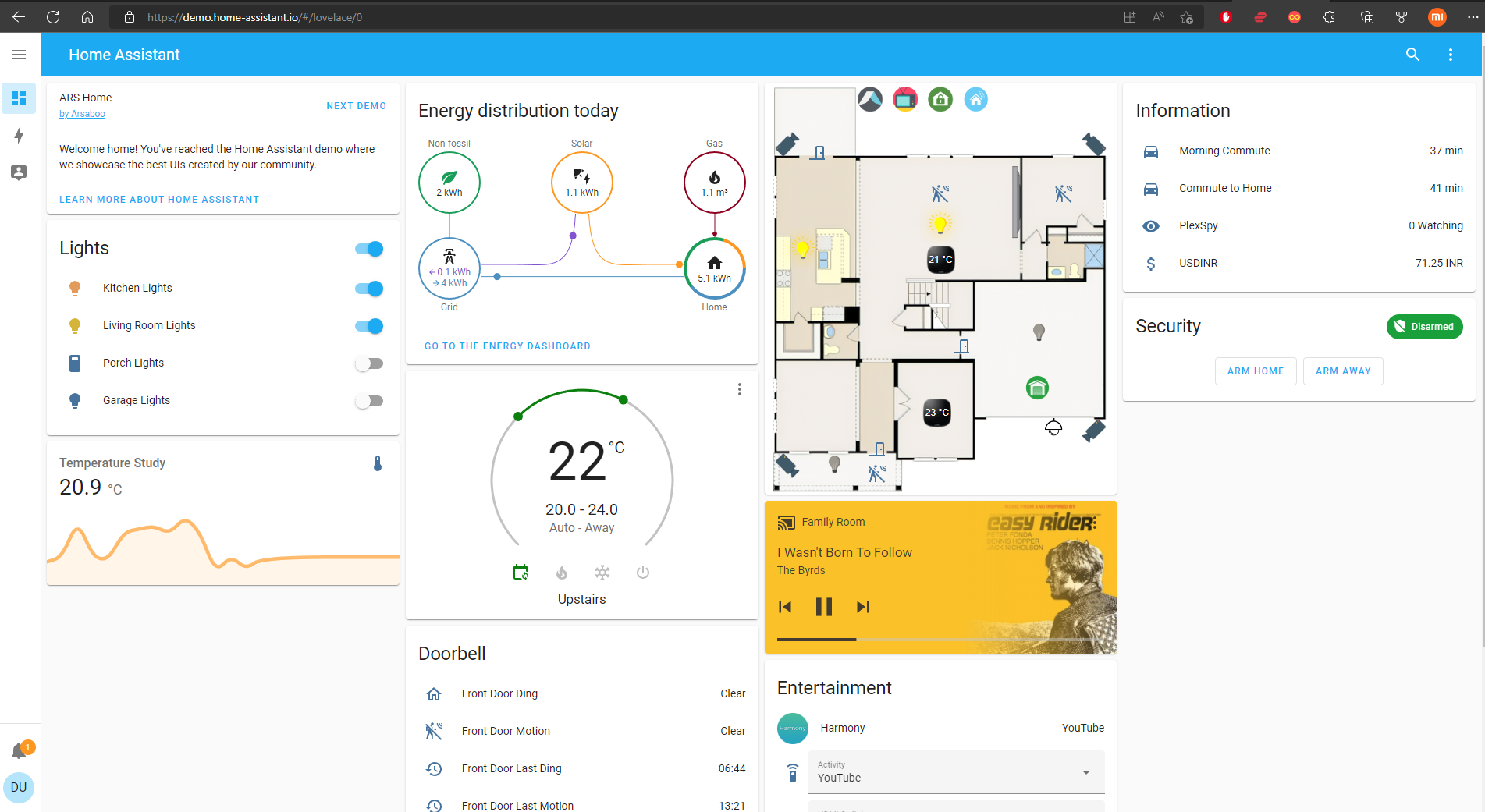
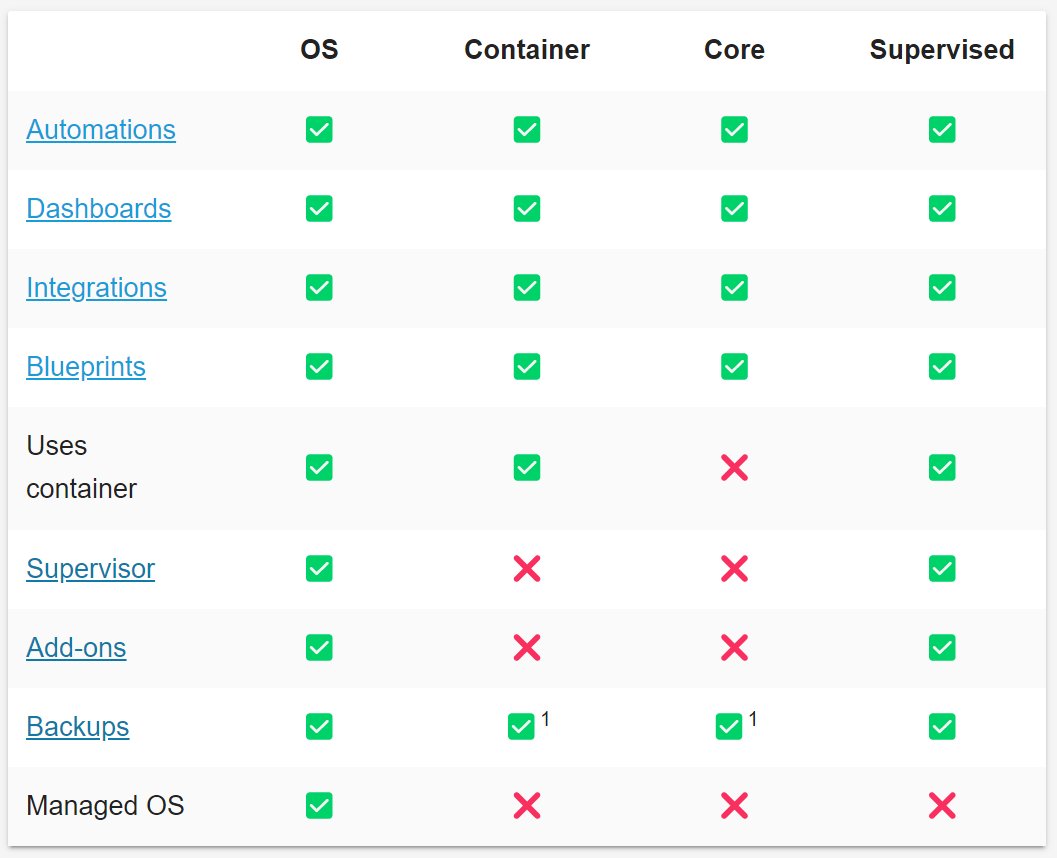
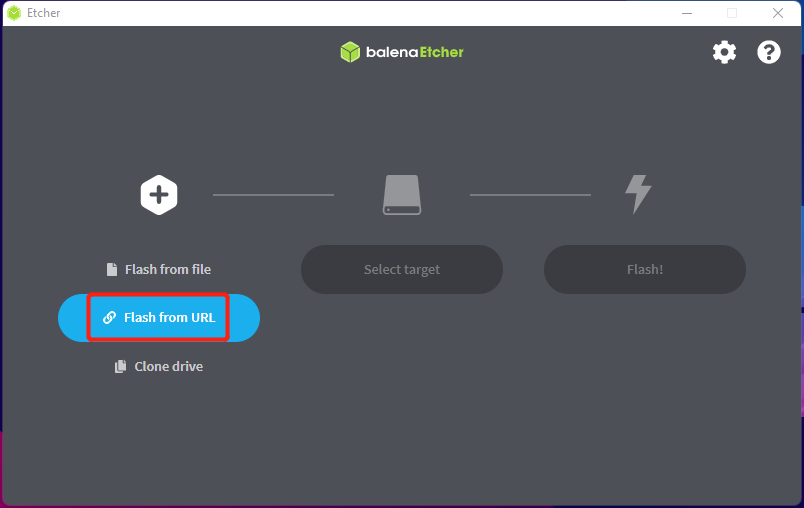
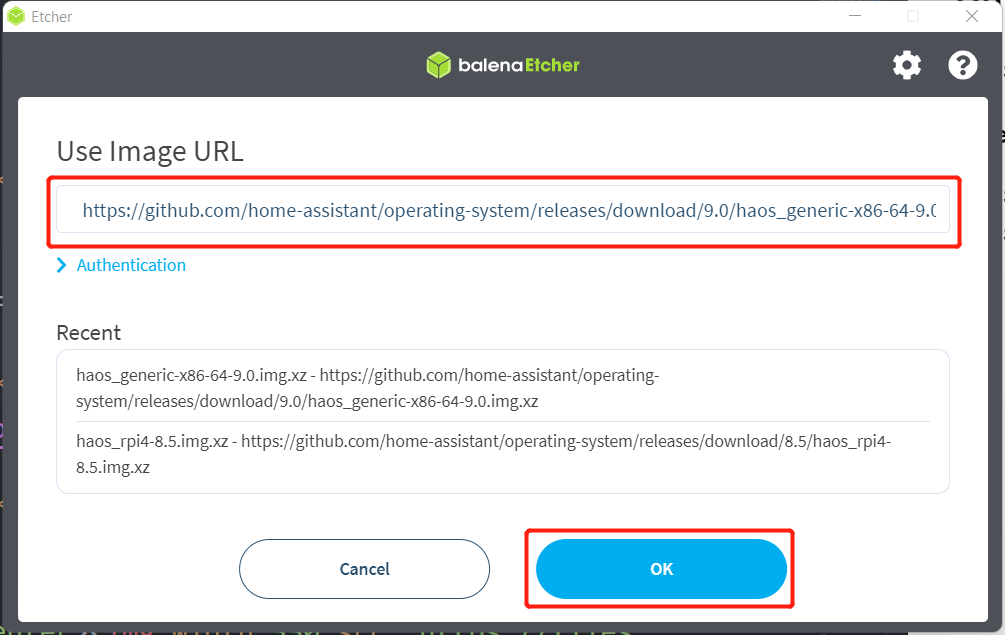
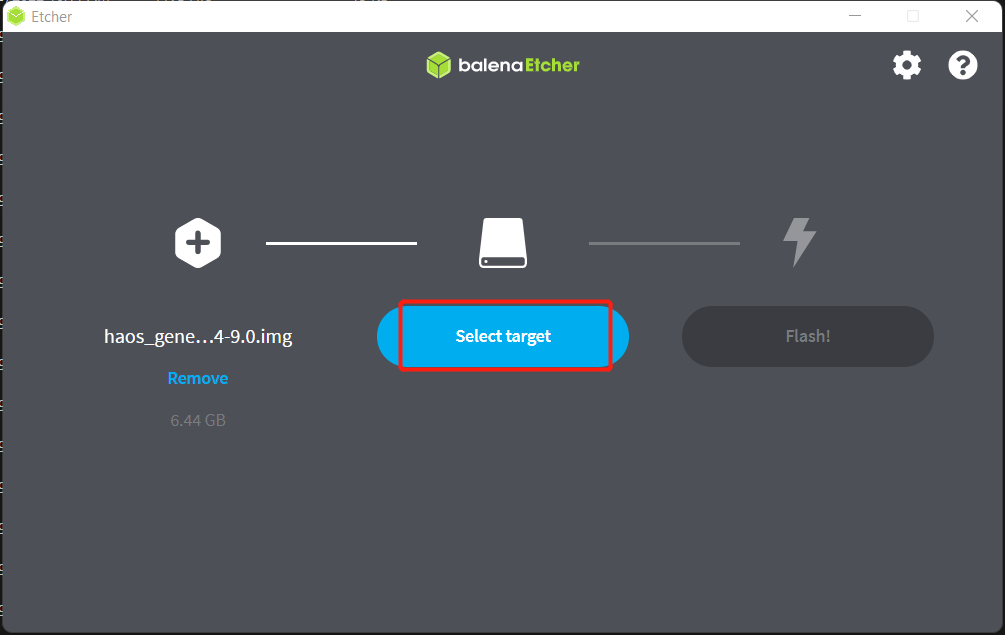
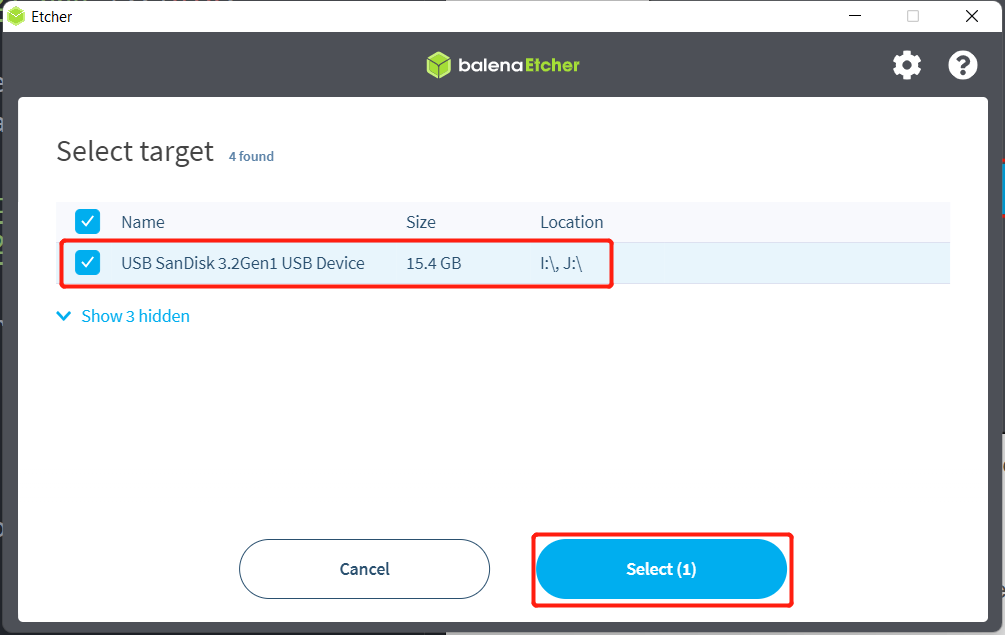
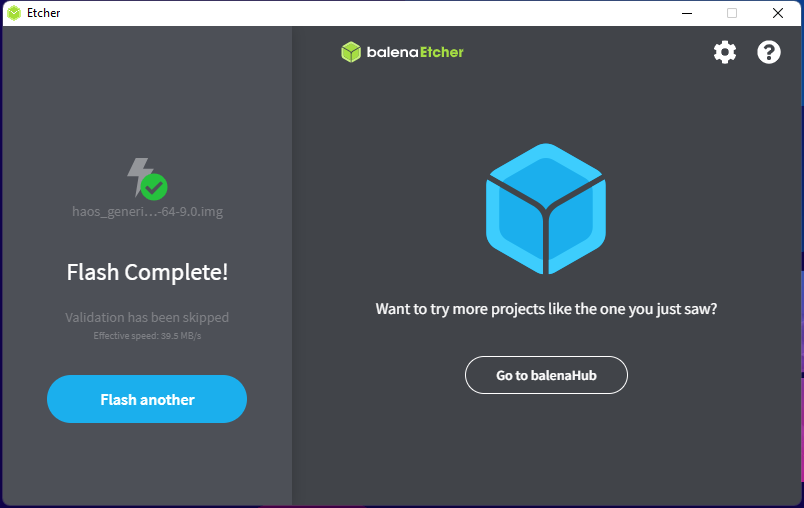

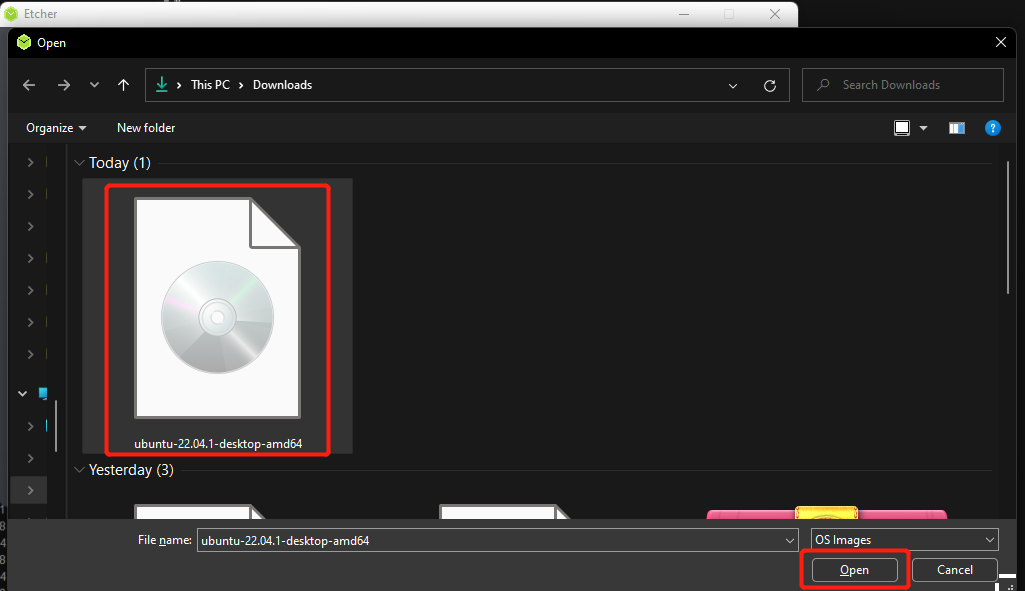
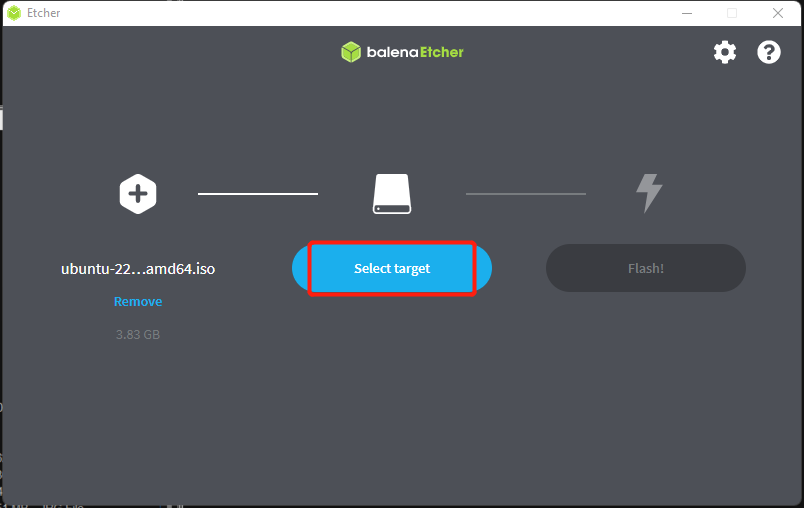
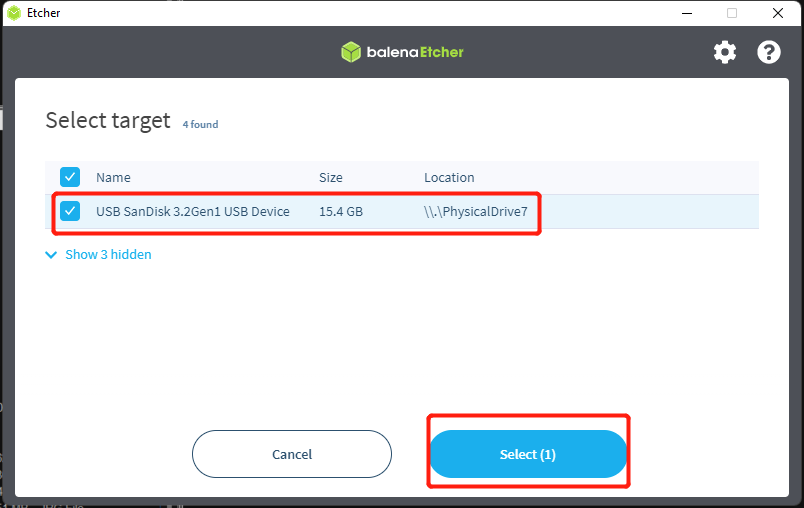
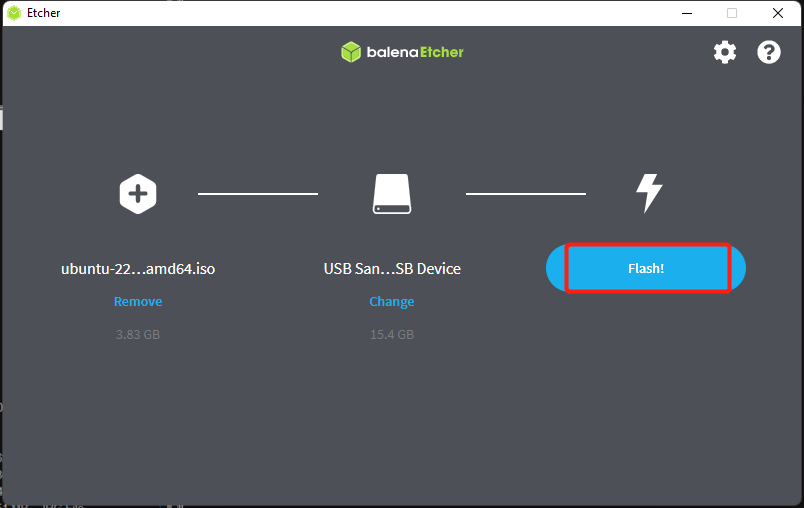
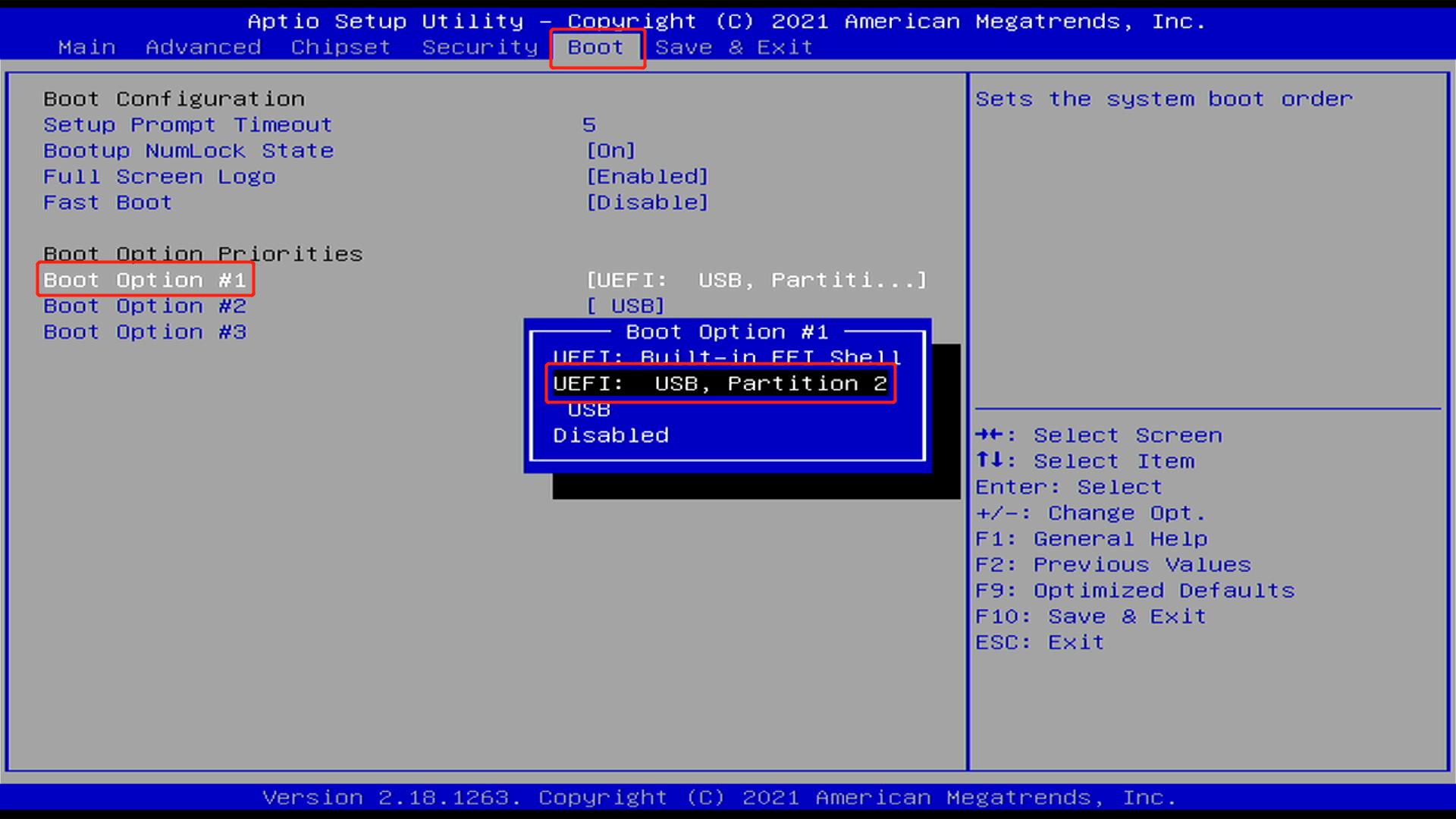
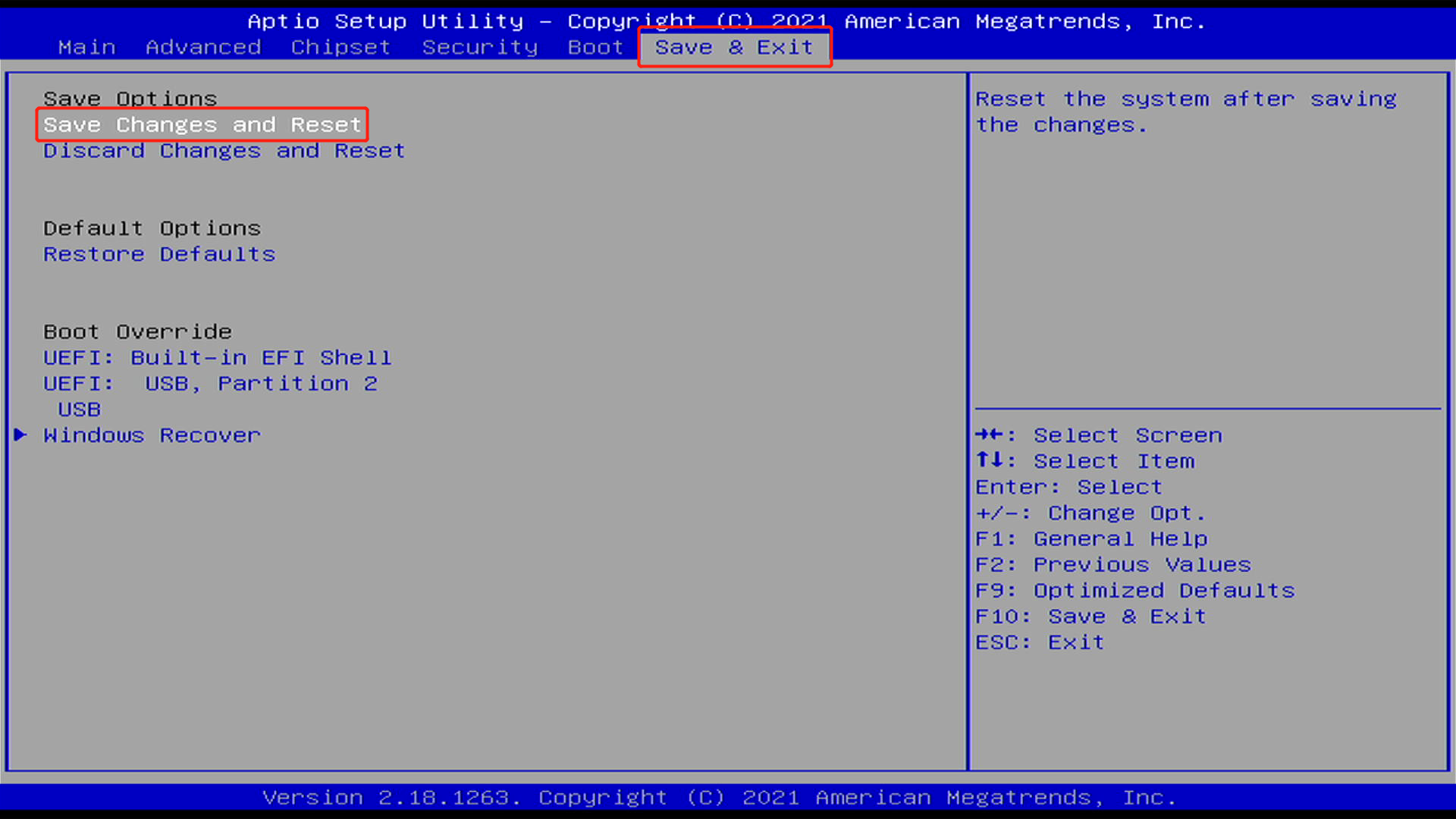
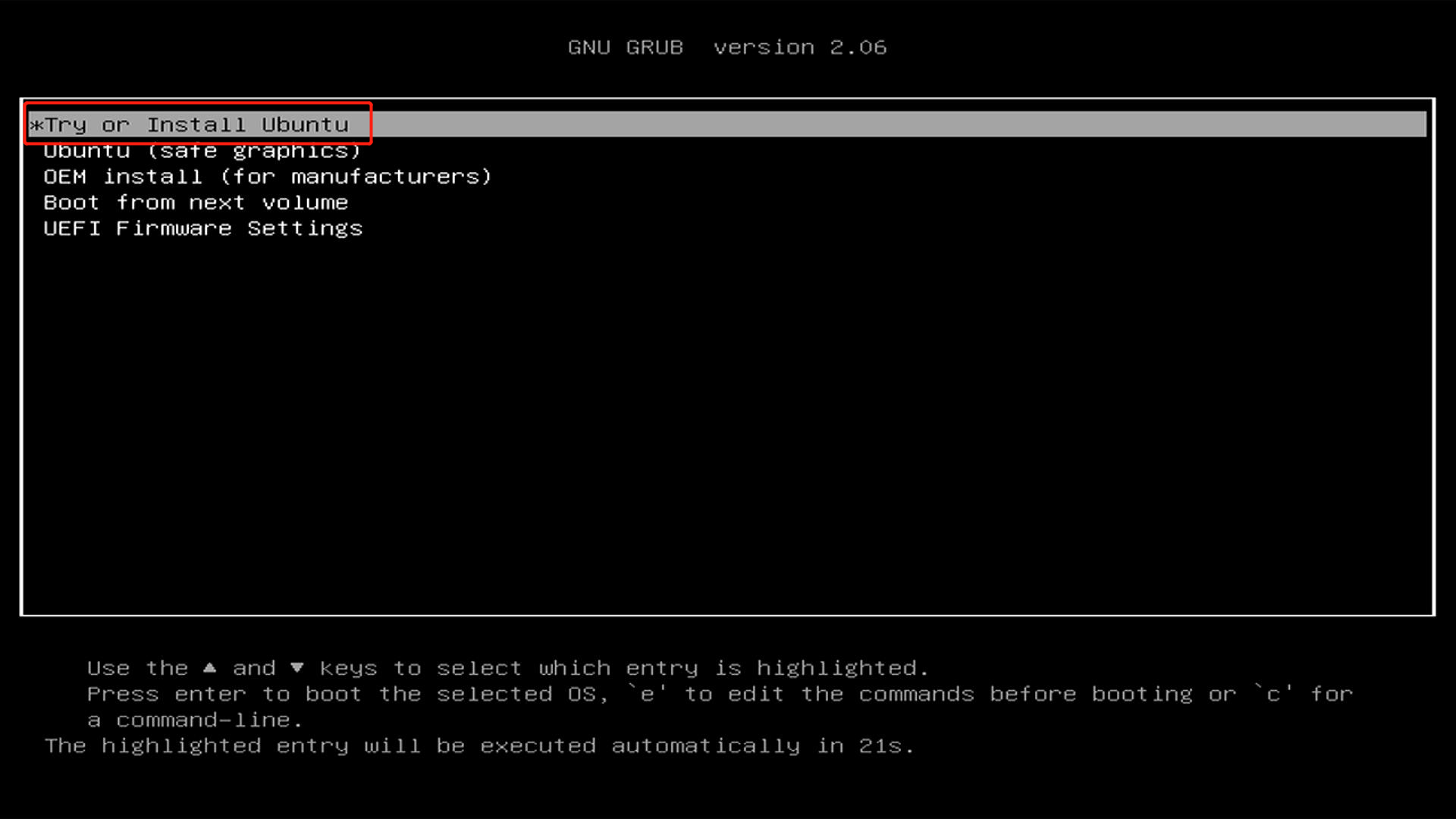


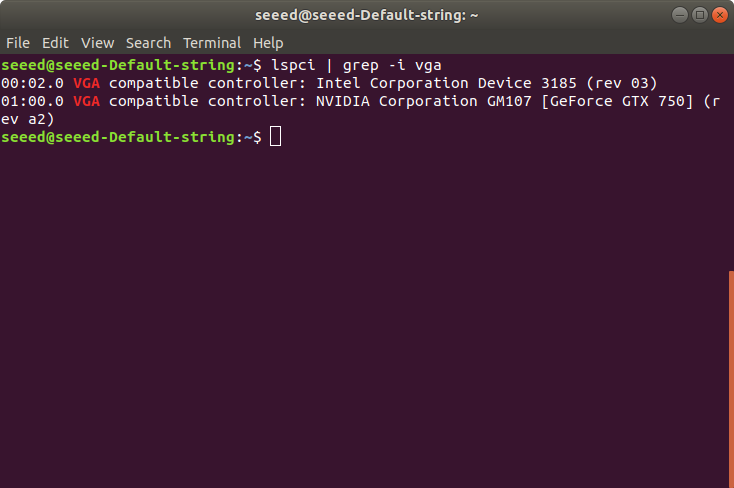
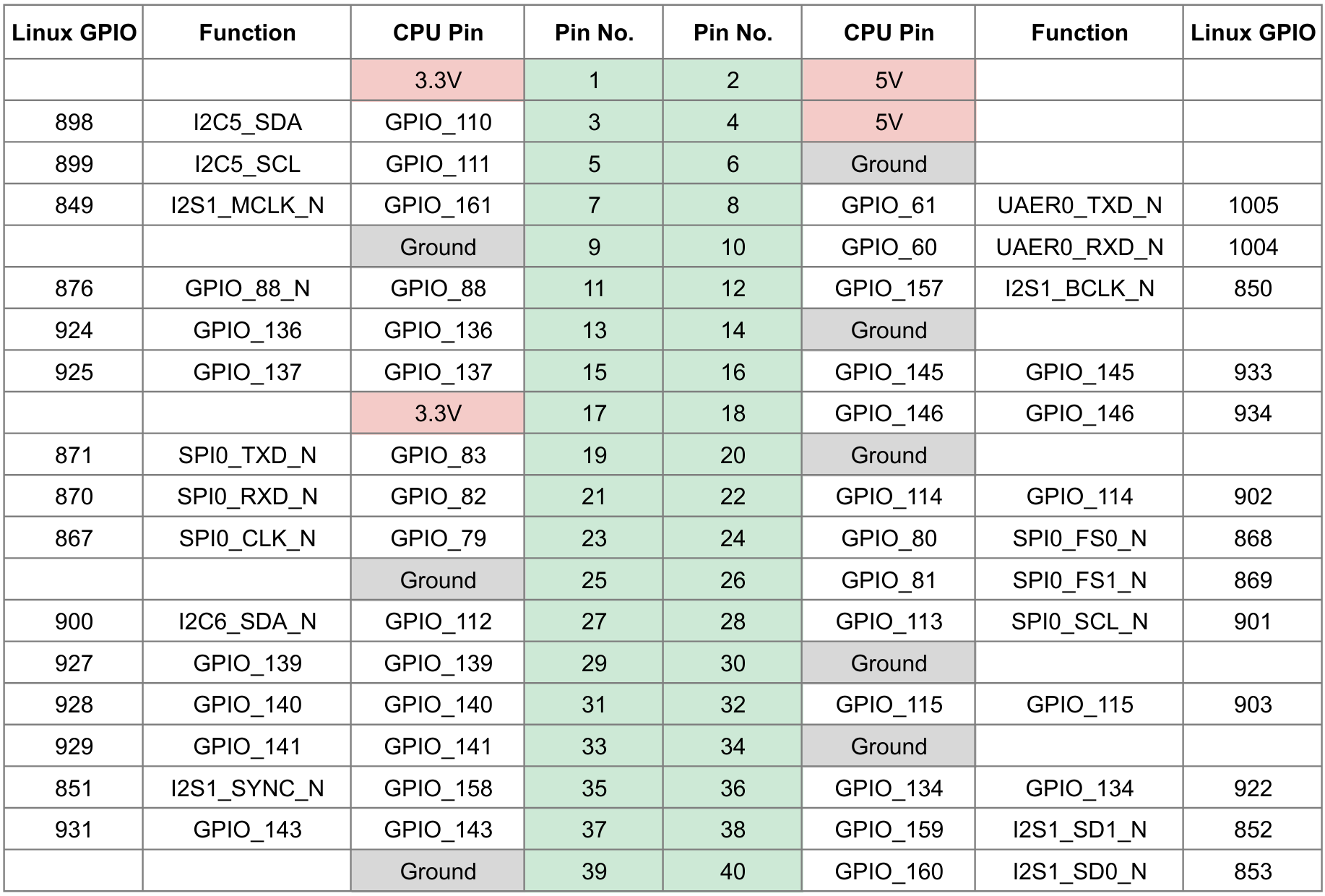
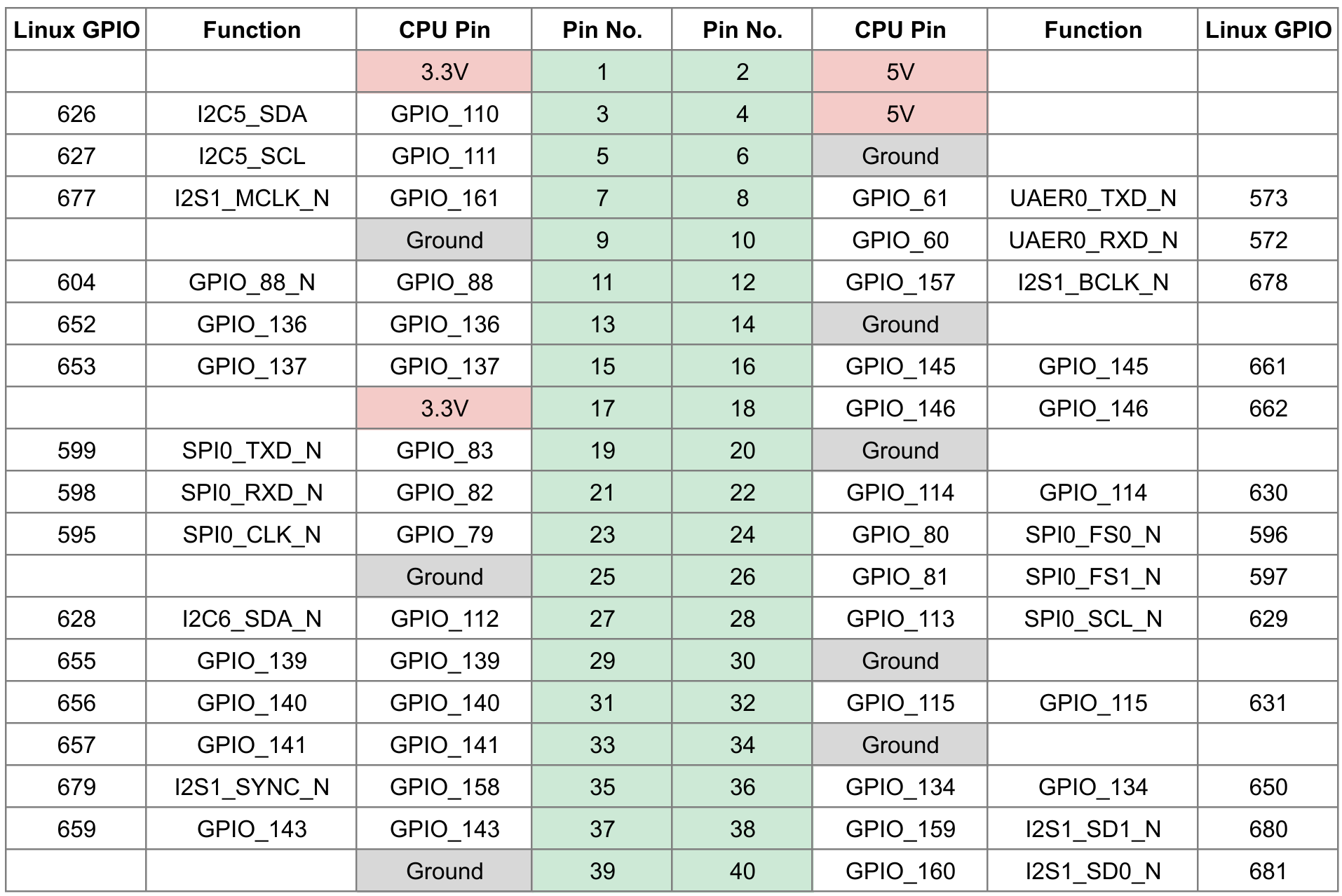
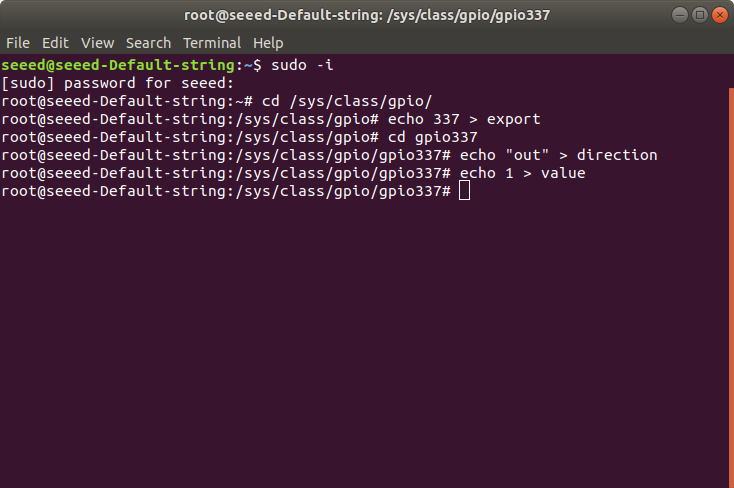
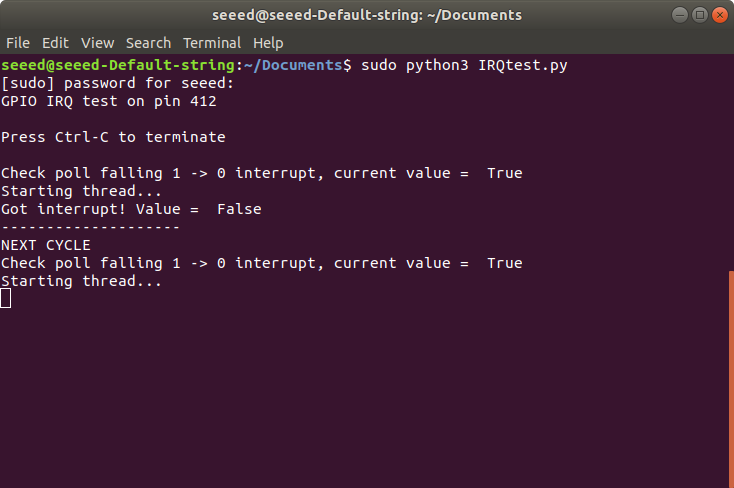
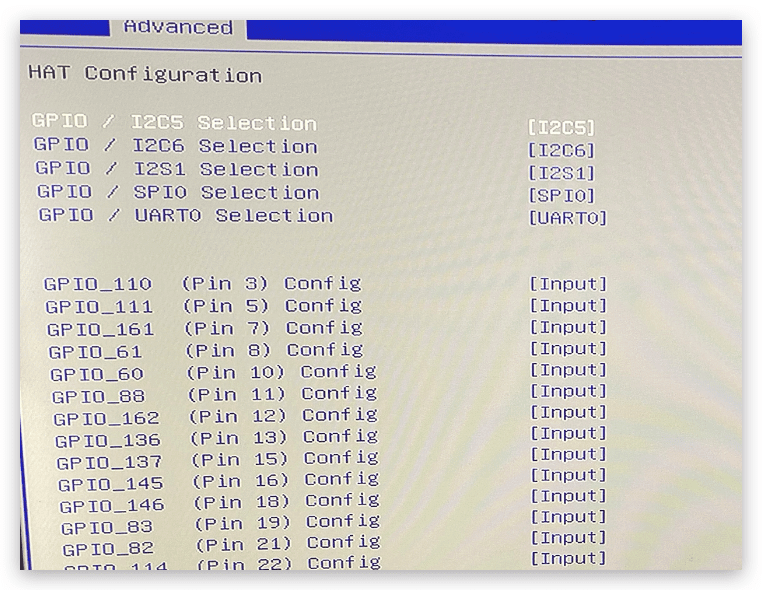
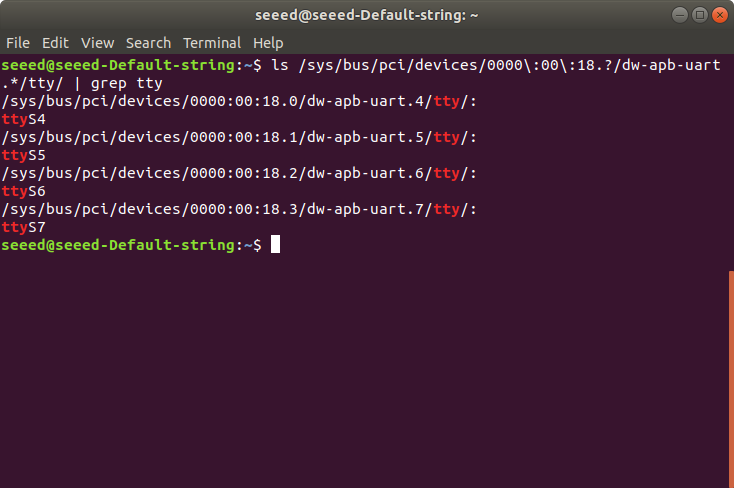
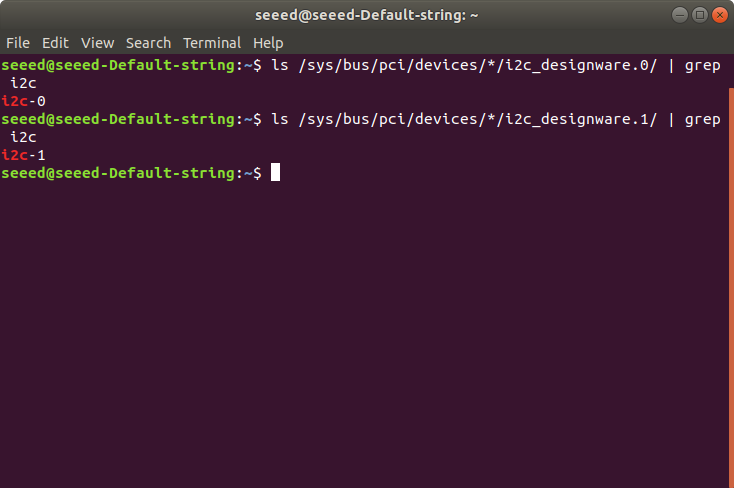
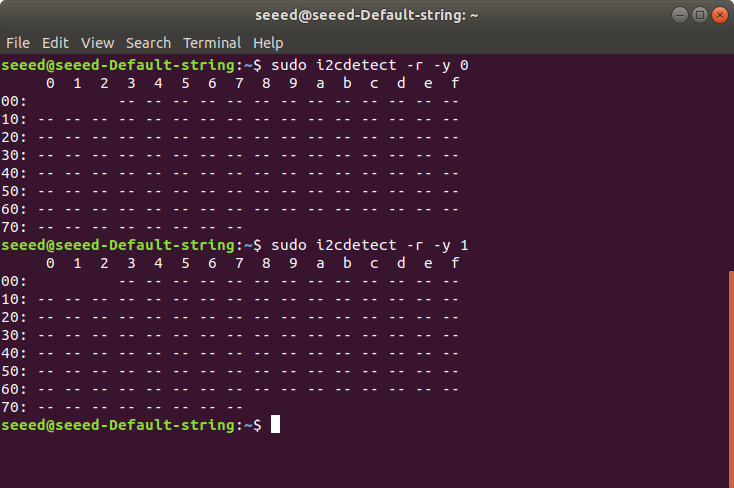
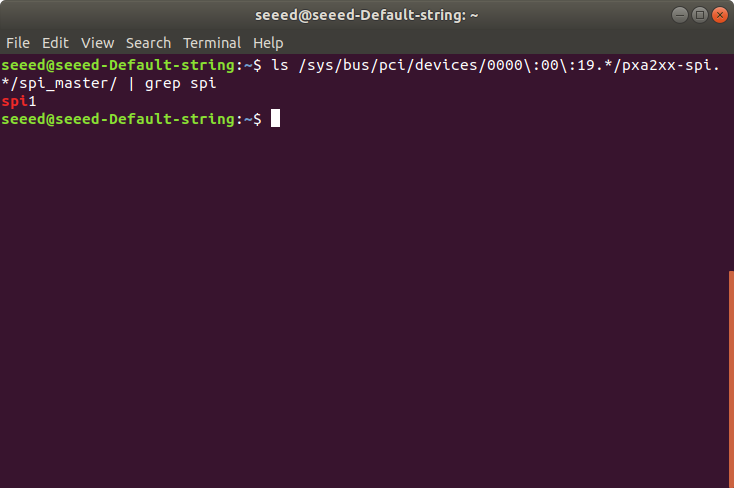
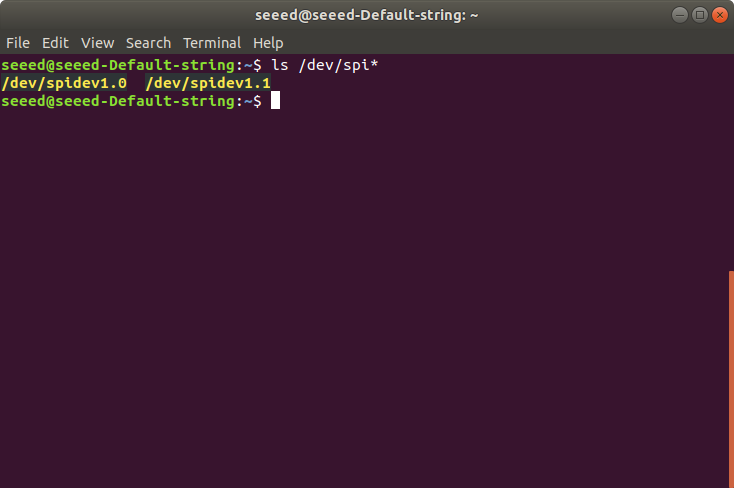
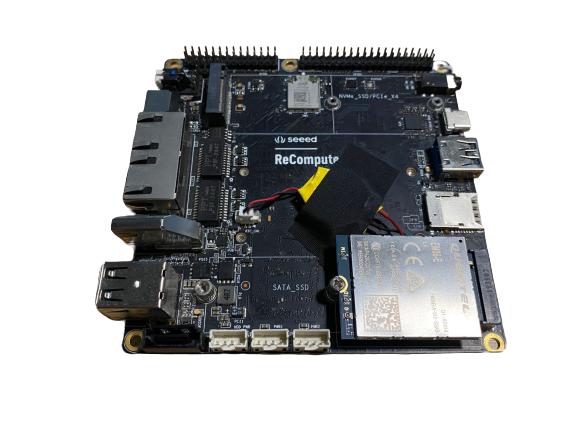
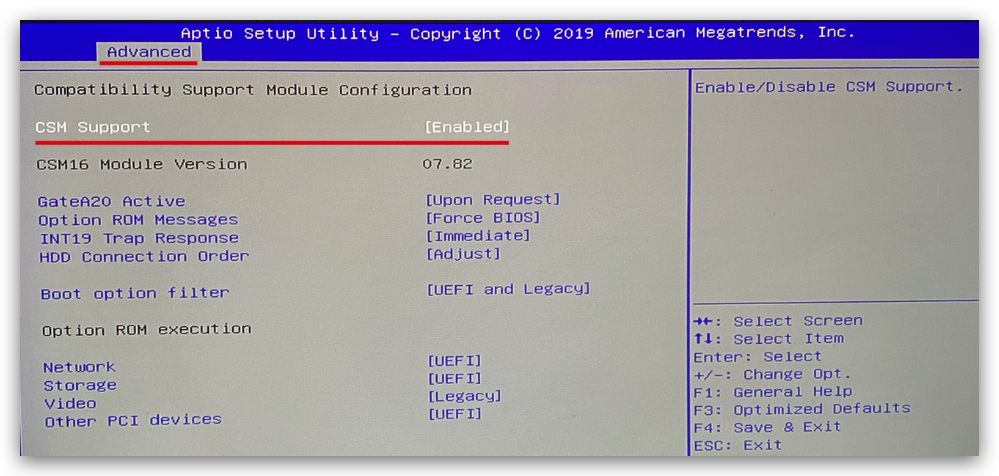


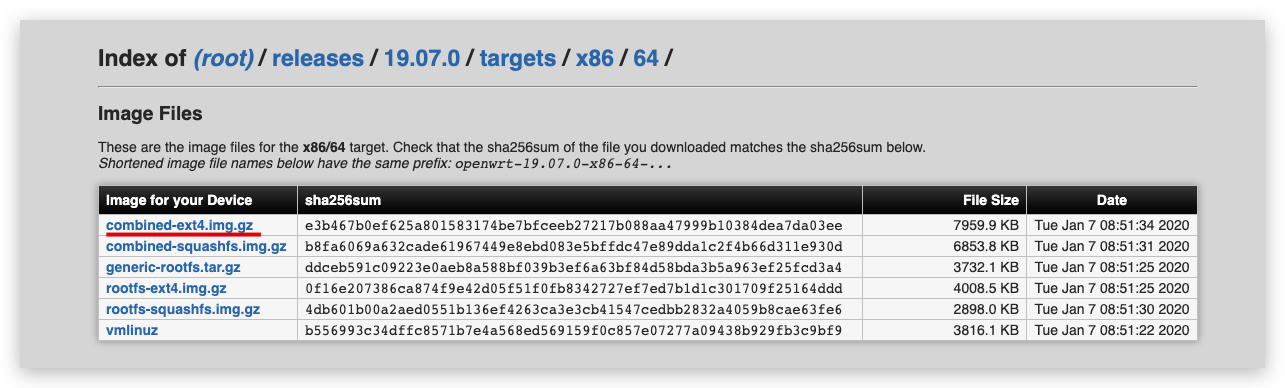
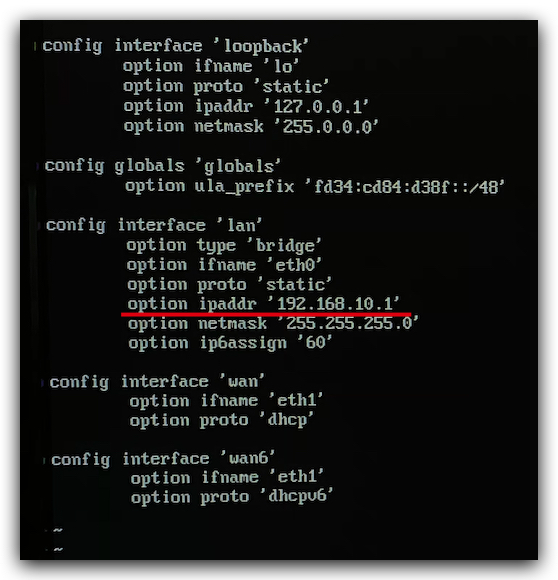
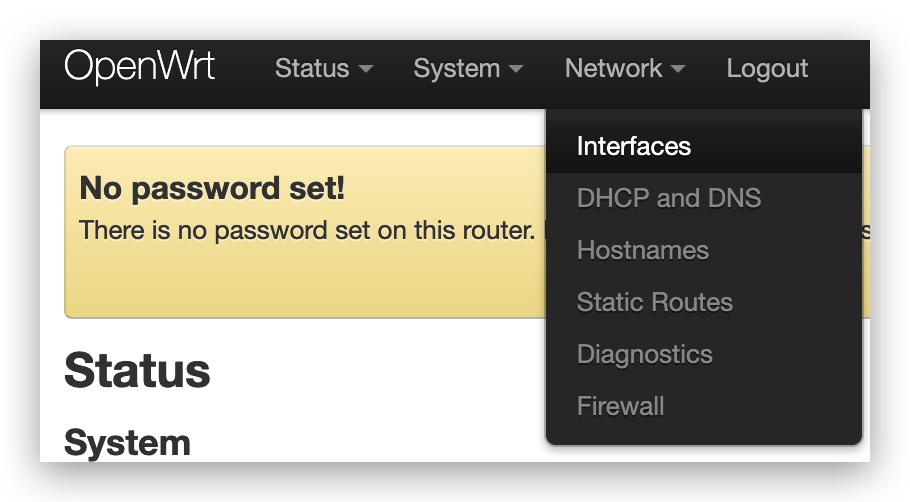
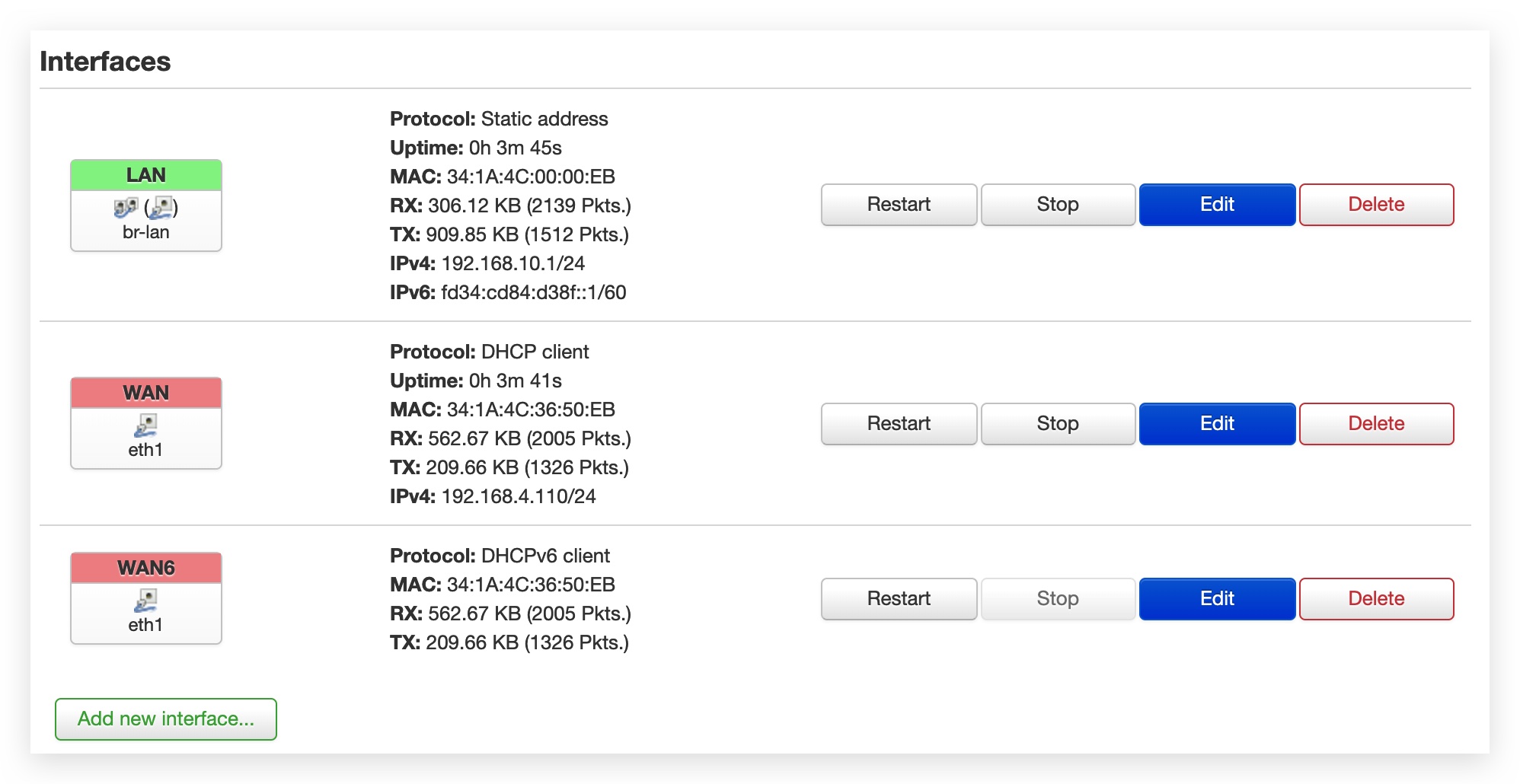


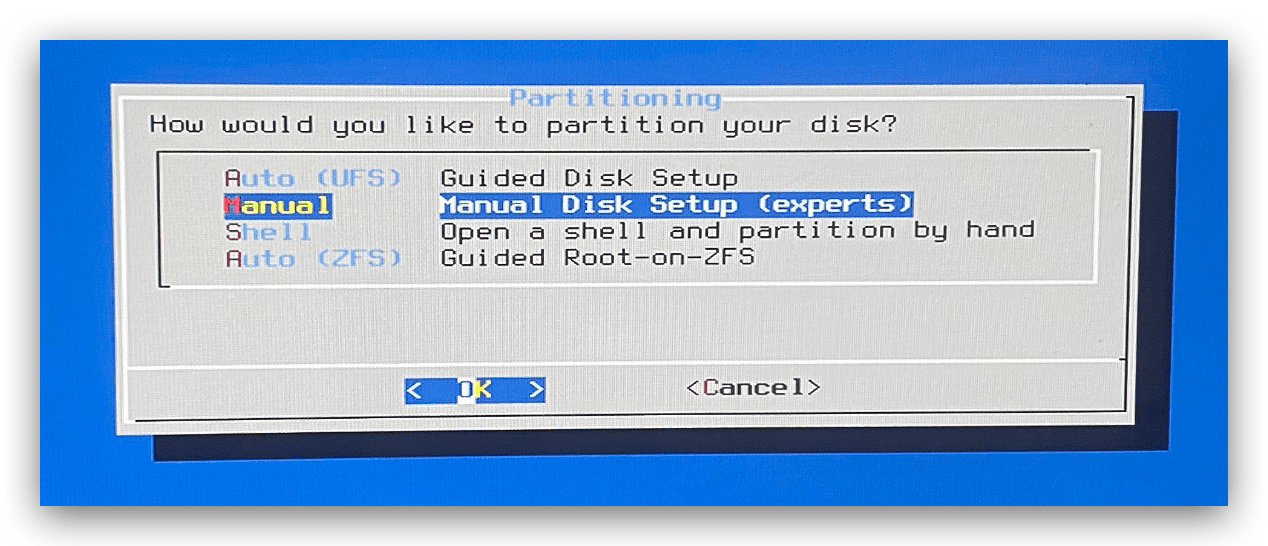
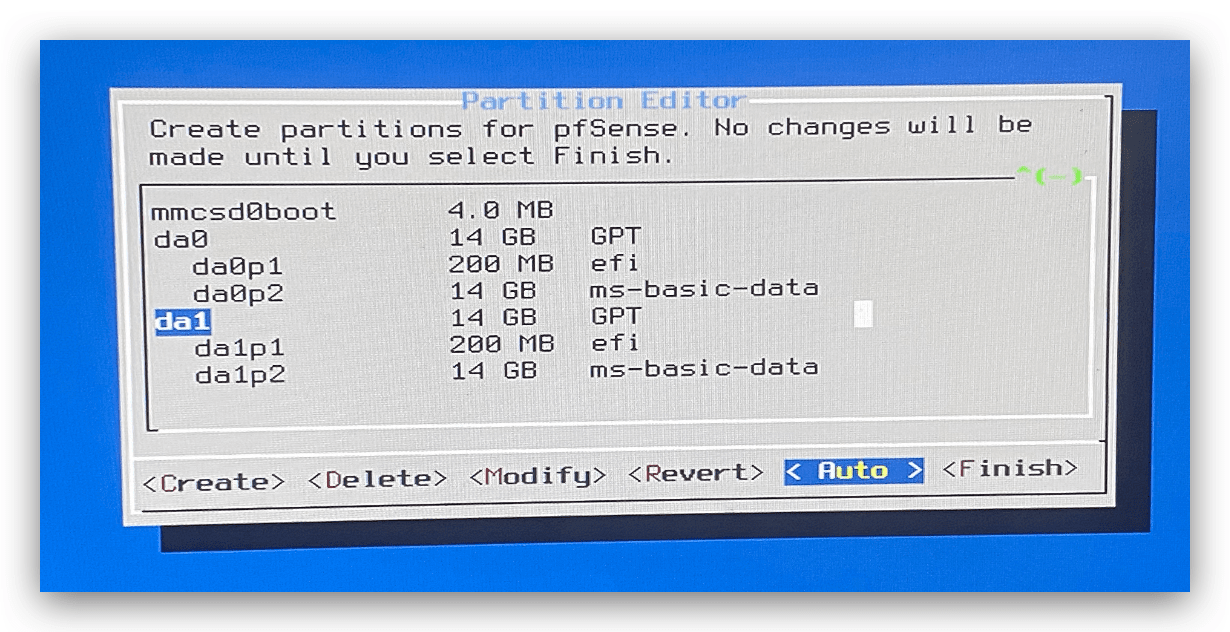
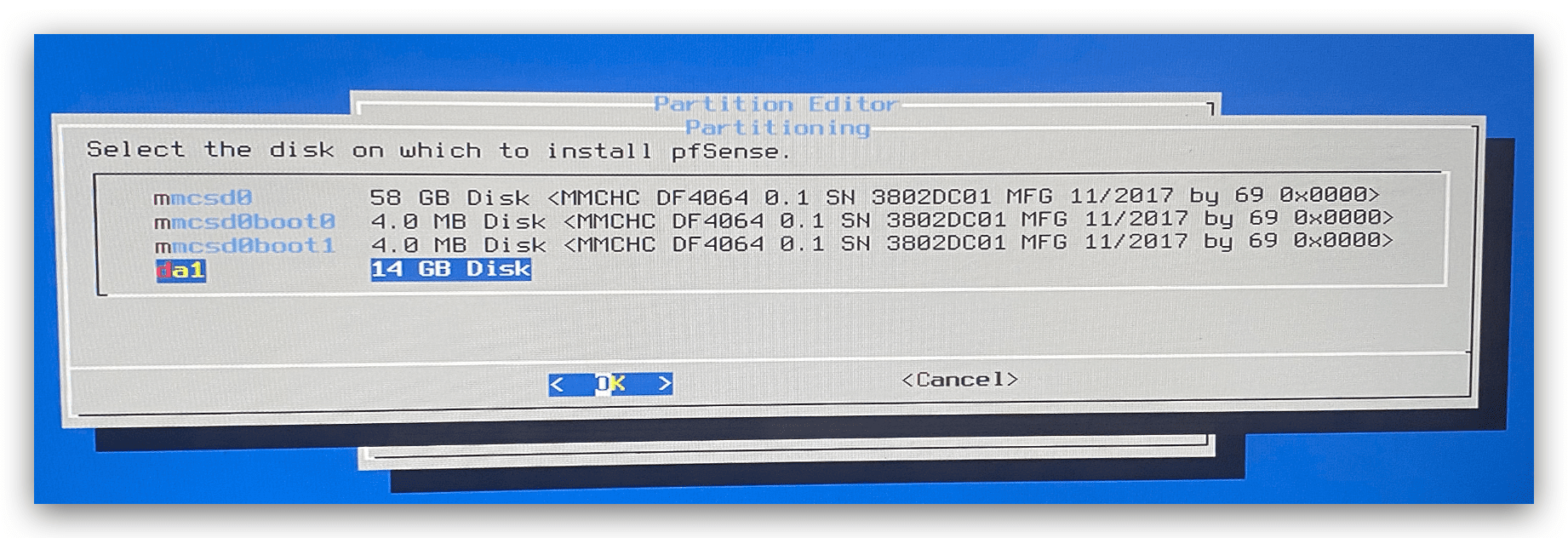
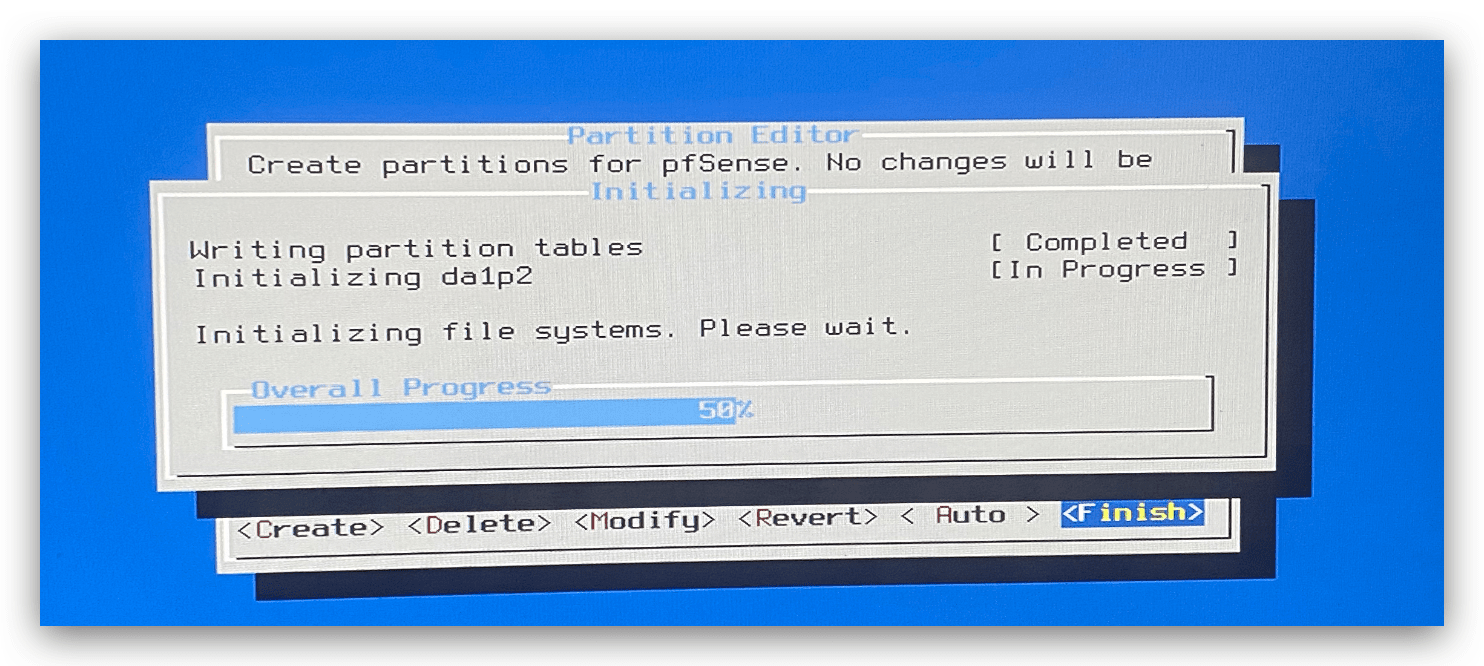
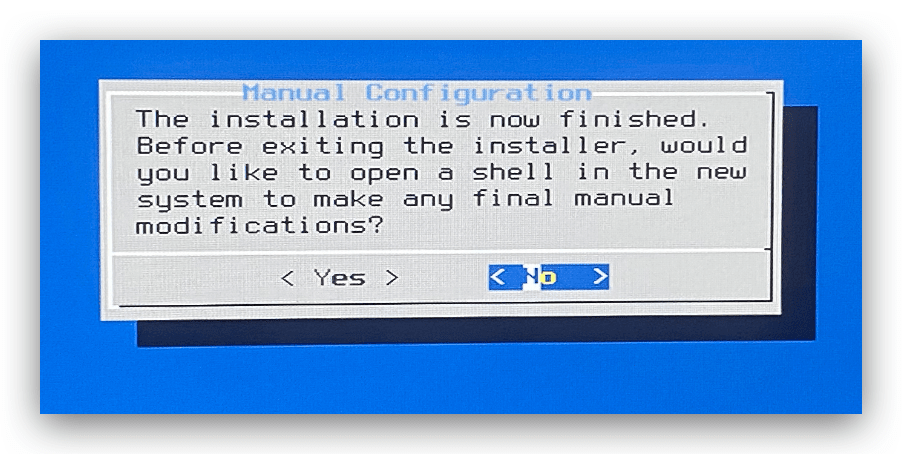
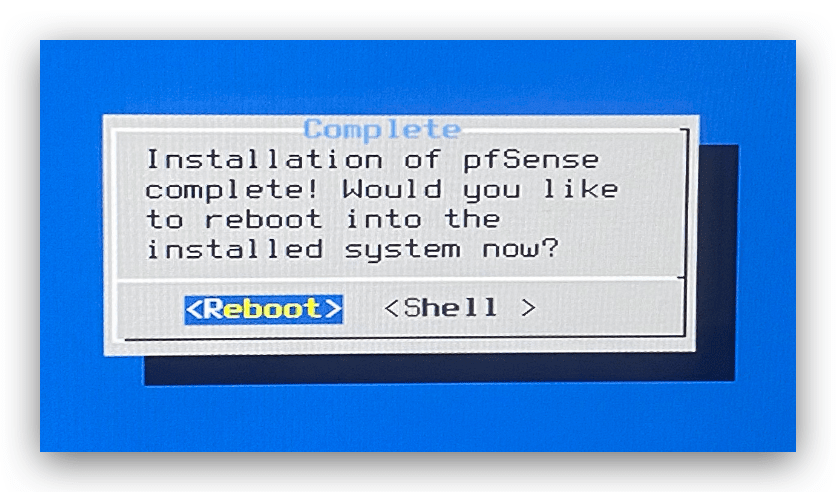
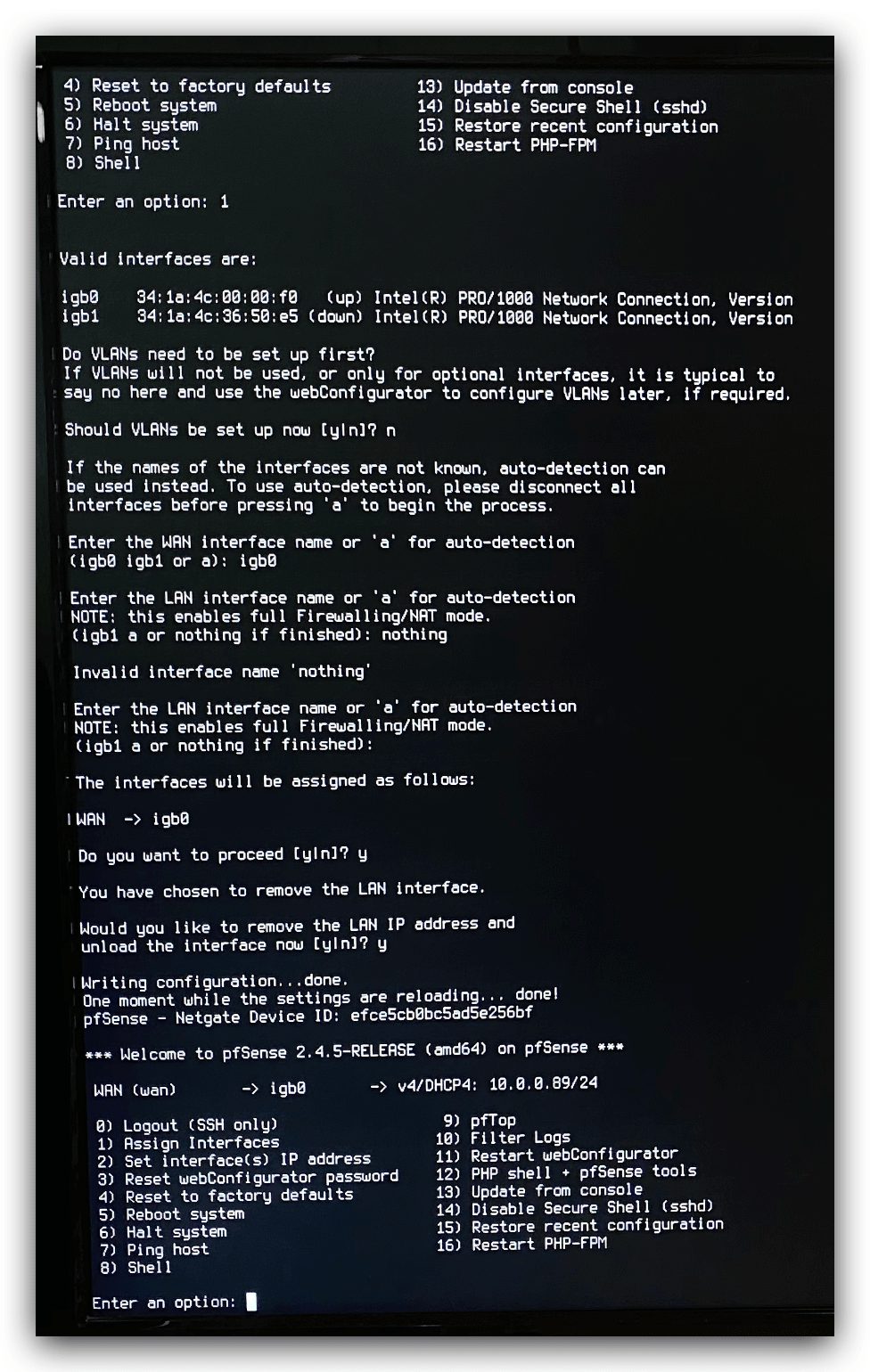
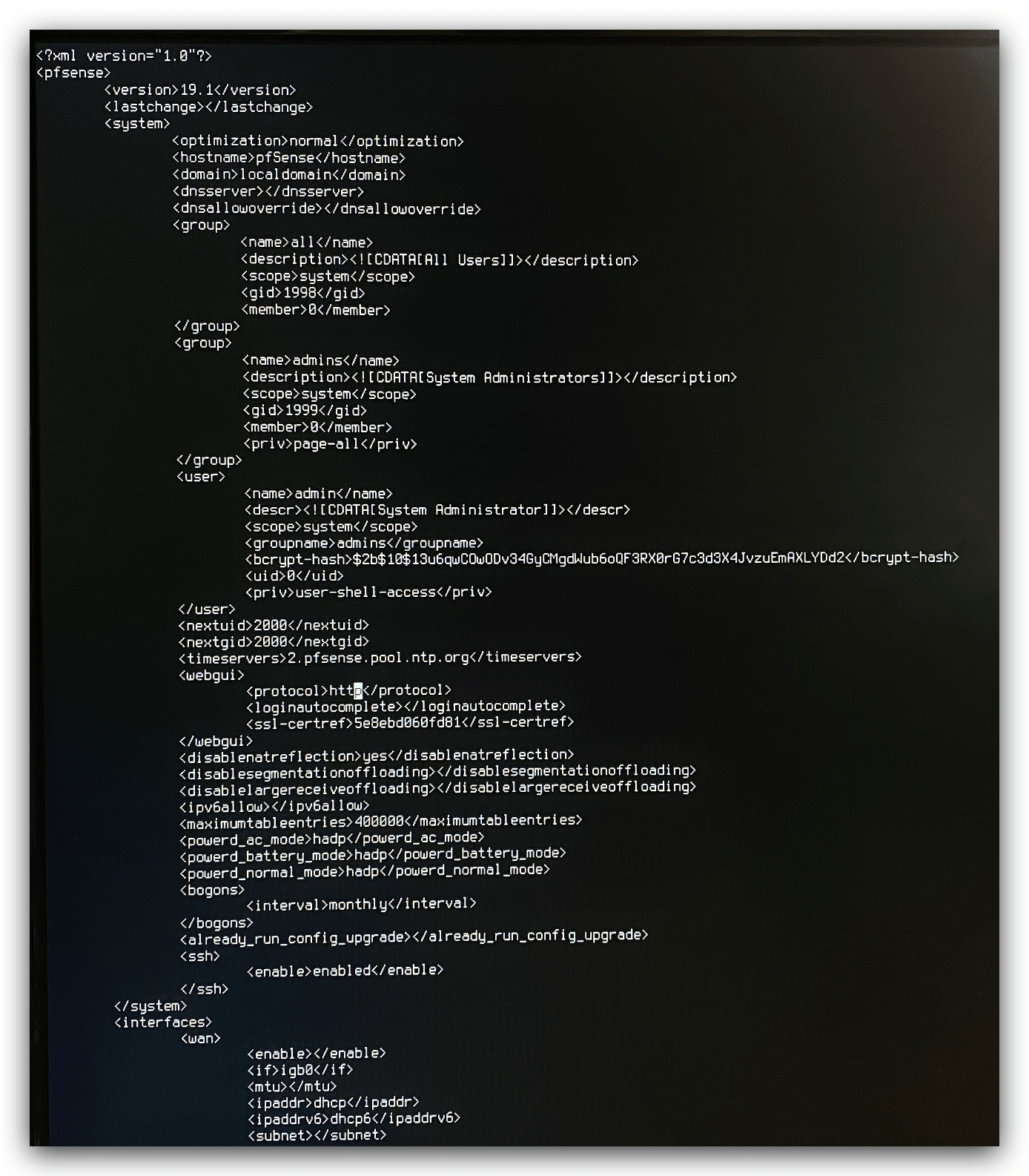
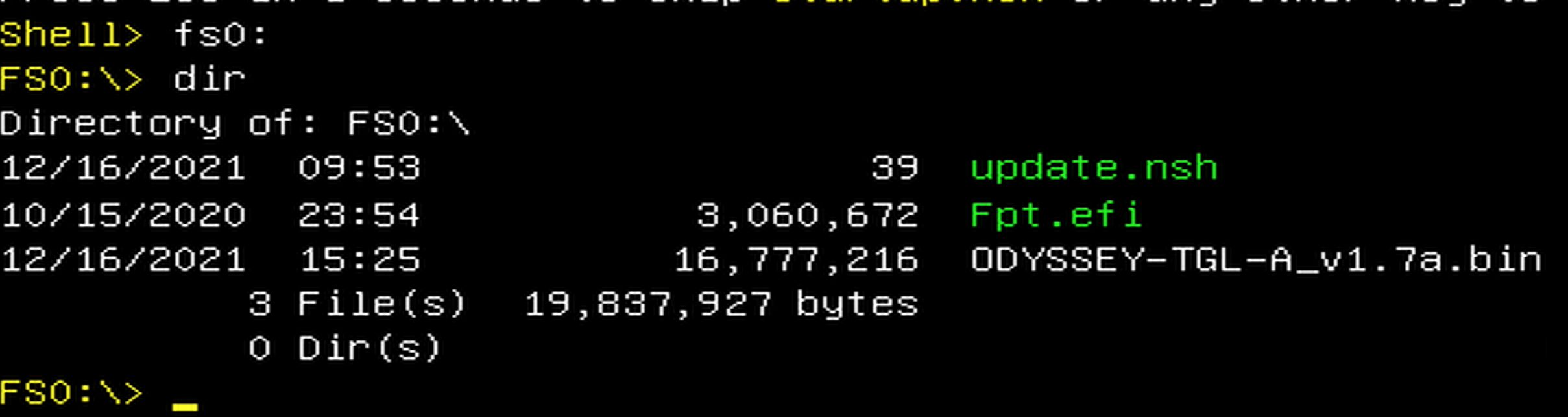


 -
-


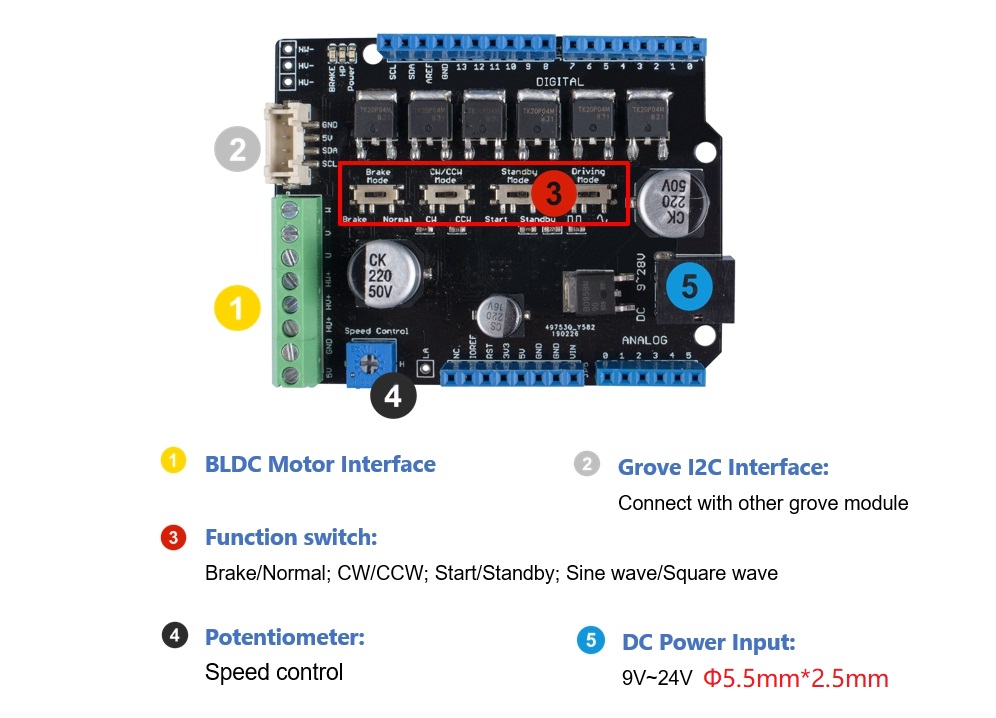
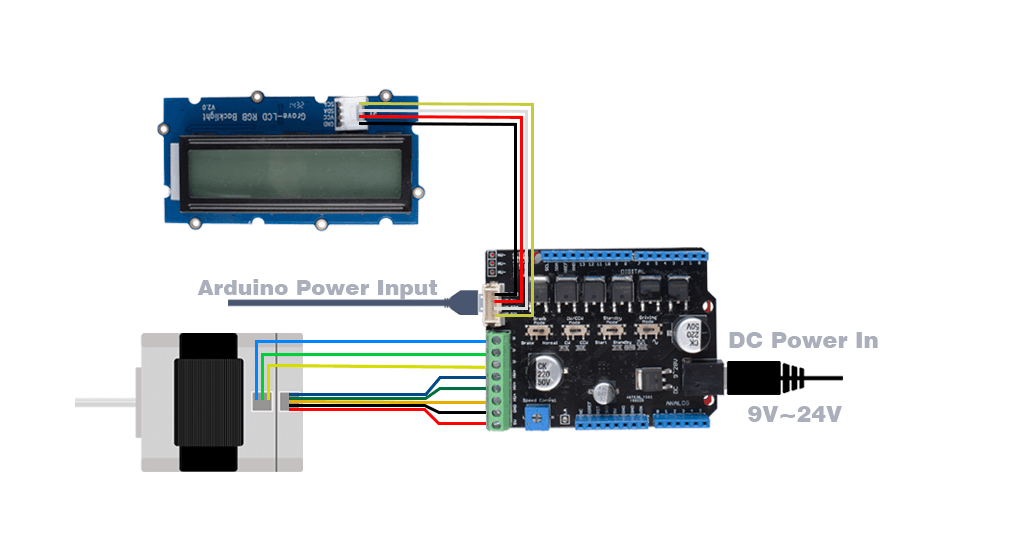
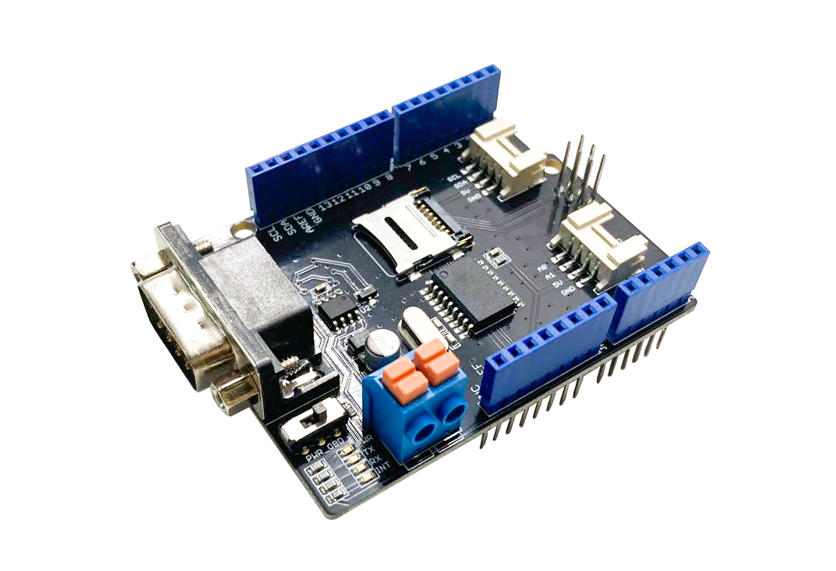

 -
-