 +
+
+
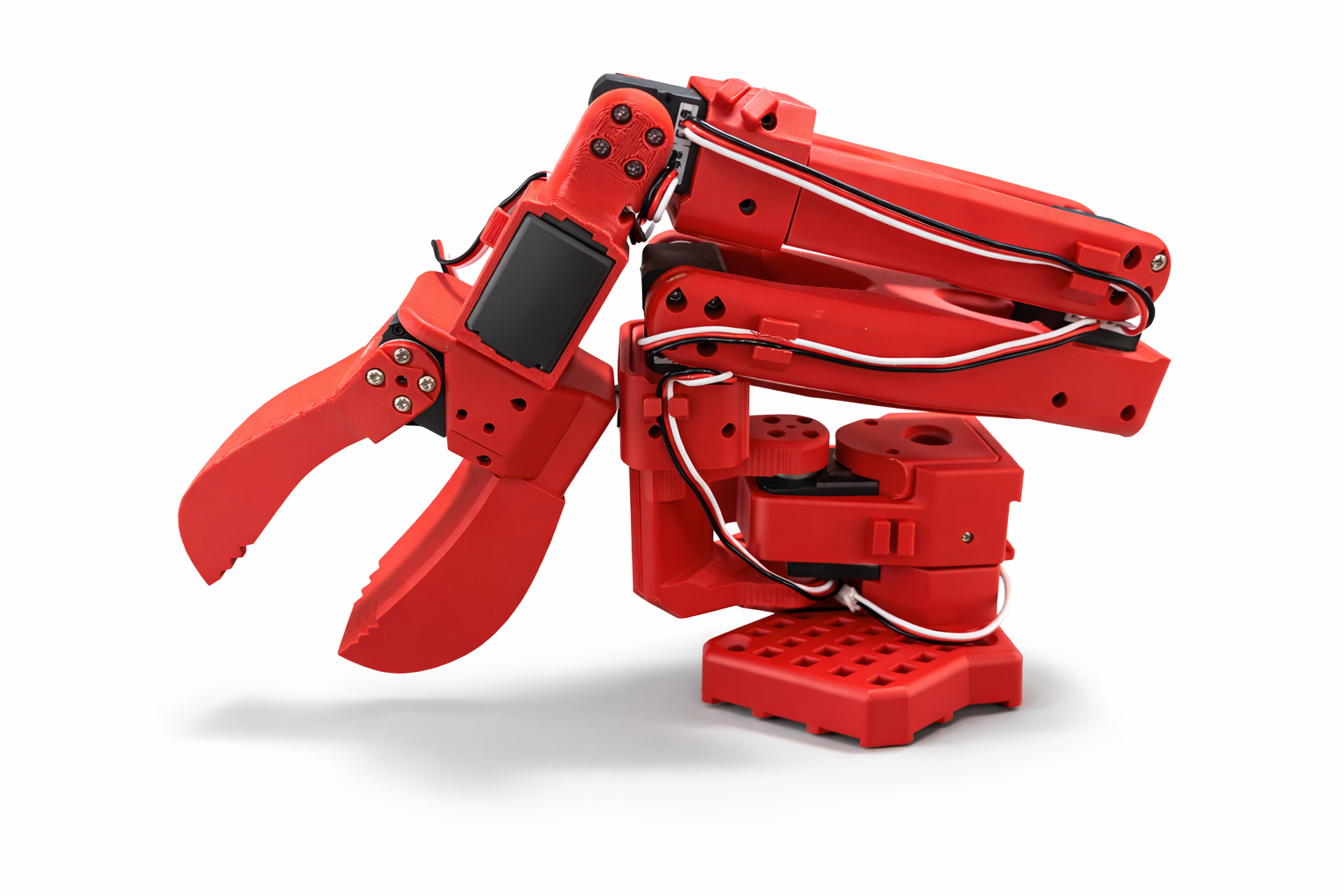
+| Kit de desarrollo NVIDIA® Jetson AGX Thor™ | +SO-ARM101 Brazo de IA de bajo costo | +
|---|---|
|
+
+
+  +
+ |
+
+
+
+  +
+ |
+
| + + | ++ + | +
 +
+ +
+
+
+| NVIDIA® Jetson AGX Thor™ Developer Kit | +SO-ARM101 Low-Cost AI Arm | +
|---|---|
|
+
+
+
+ |
+
+
+
+
+ |
+
|
+
+
+ 今すぐ入手 🖱️
+
+
+ |
+
+
+
+ 今すぐ入手 🖱️
+
+
+ |
+
+
+
+| NVIDIA® Jetson AGX Thor™ Developer Kit | +SO-ARM101 Low-Cost AI Arm | +
|---|---|
|
+
+
+
+ |
+
+
+
+
+ |
+
|
+
+
+ 立即获取 🖱️
+
+
+ |
+
+
+
+ 立即获取 🖱️
+
+
+ |
+
+
+