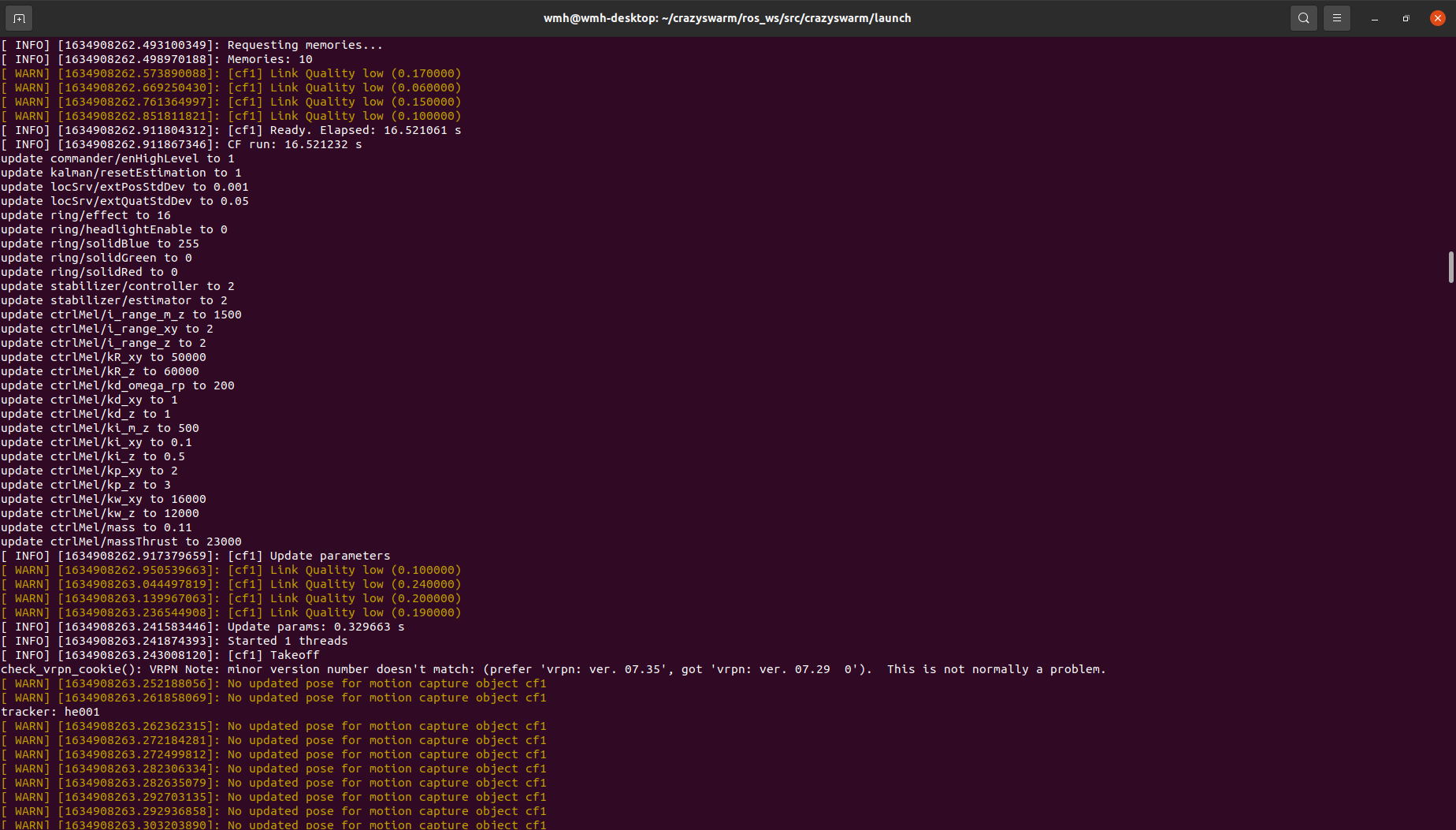
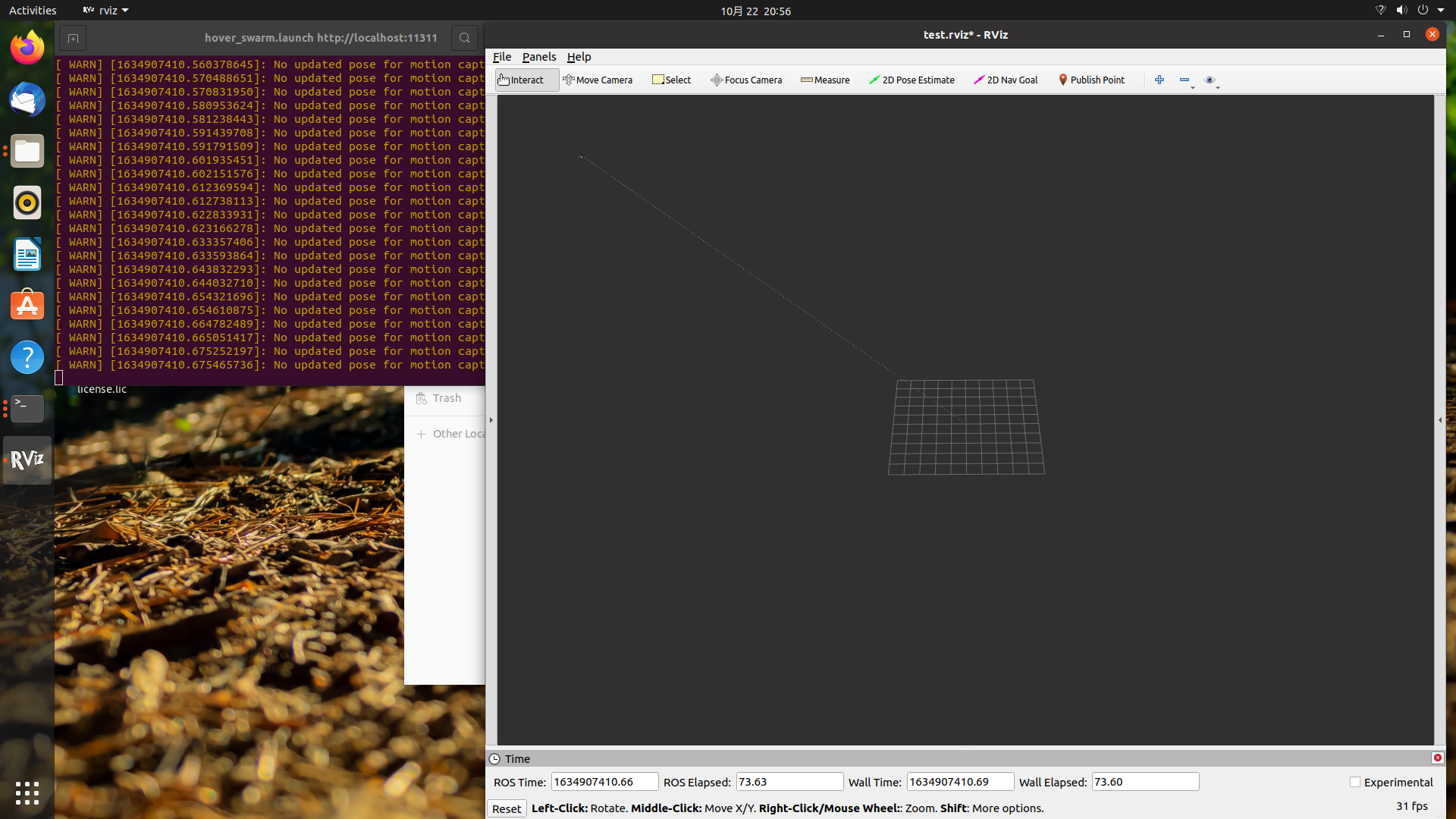
No updated pose for CF cf1.And rviz shows that the plane has taken off. #510
Replies: 7 comments 7 replies
-
|
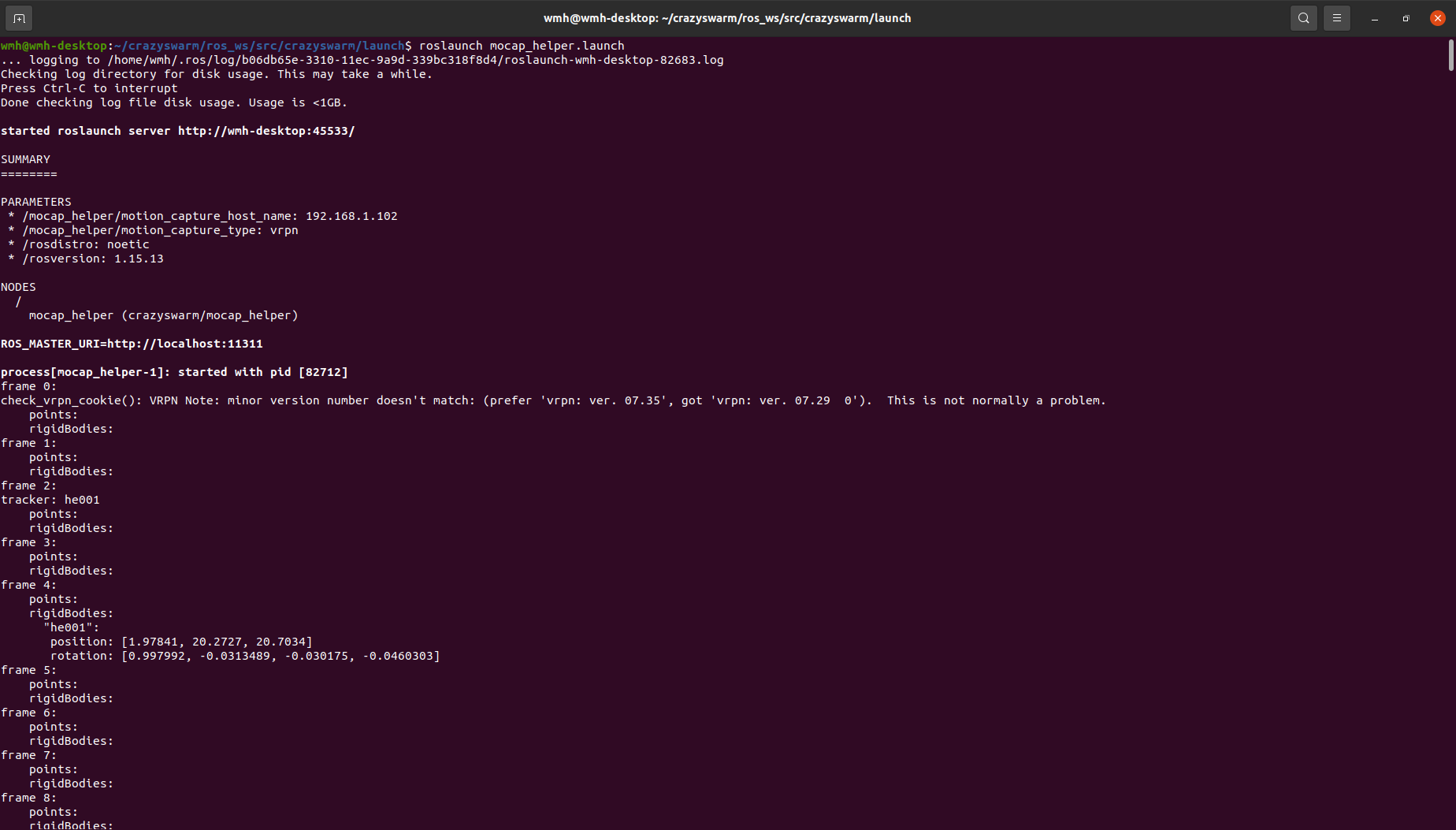
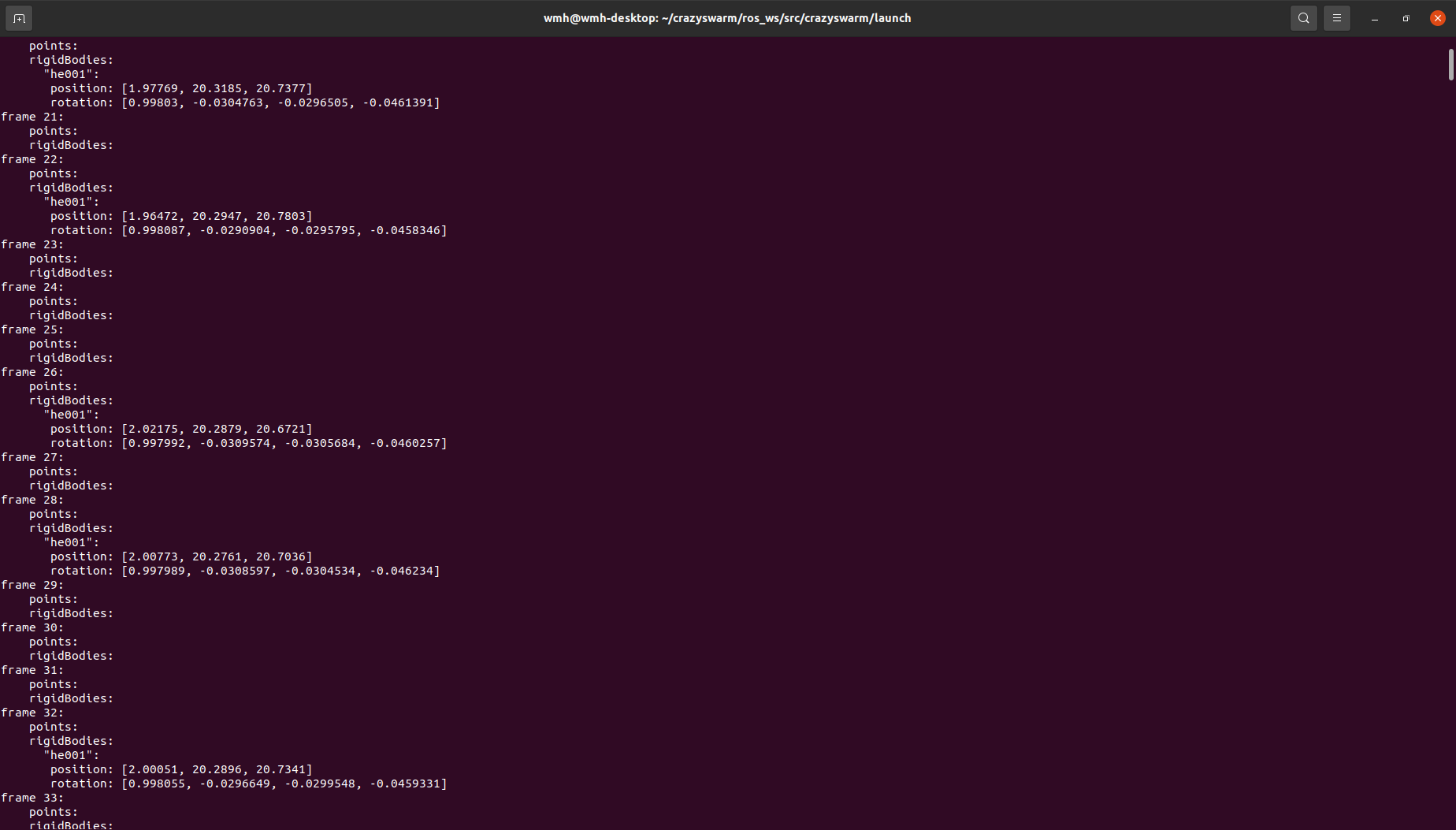
I try to run mocao_helper.launch. |
Beta Was this translation helpful? Give feedback.
-
|
Beta Was this translation helpful? Give feedback.
-
|
And how to solve this problem in RVIZ? Launch hover_swarm. Launch, rVIz's planes are already in the sky. |
Beta Was this translation helpful? Give feedback.
-
|
This is not a bug/problem, since it is simply showing the position received over VRPN. |
Beta Was this translation helpful? Give feedback.
-
|
Ok! Thank you very much!I will revise it tomorrow. |
Beta Was this translation helpful? Give feedback.
-
|
I met the same problem above and I don't know how to solve it yet. I have changed my object name to cf1/cf2, but it is still showing "[ WARN] [1638459450.388917491]: No updated pose for motion capture object cf1", and rostopic list shows there are only topic name cf1/cmd_*,no cf1/pose. Showing below:
[ INFO] [1638459685.668835290]: [cf1] Update parameters 2.rostopic list /cf1/cmd_full_state |
Beta Was this translation helpful? Give feedback.
-
|
ROS_MASTER_URI=http://localhost:11311 process[mocap_helper-1]: started with pid [29911] |
Beta Was this translation helpful? Give feedback.
-
|
Which motion capture system are you using? If optitrack, did you enable to stream assets in your Motive settings? |
Beta Was this translation helpful? Give feedback.
-
|
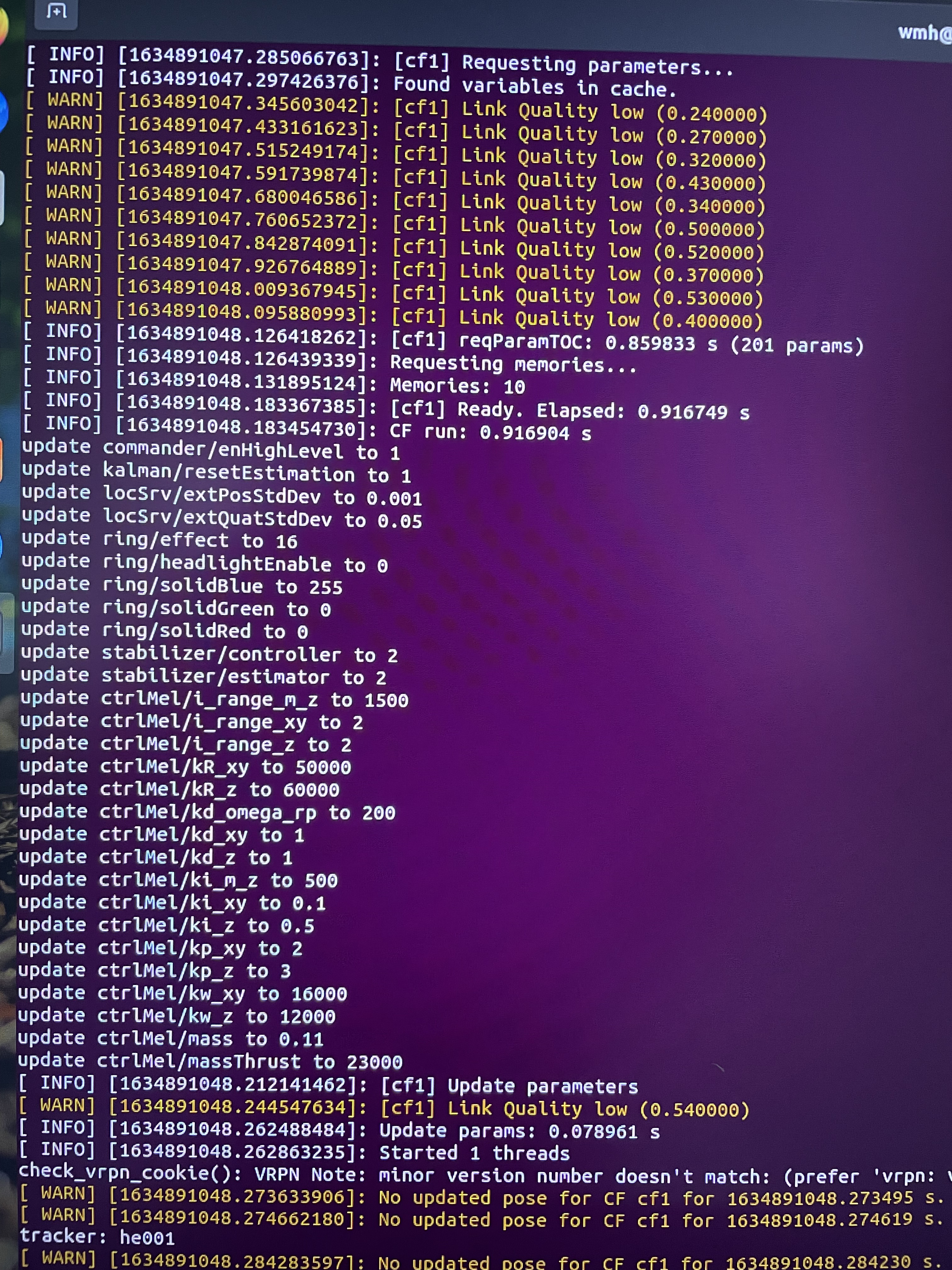
I use the vicon motion cap and I have encountered the same problem ,But the mocap_help runs will,I Can't see the crazyflie at the rviz and the terminal shows the info blow: |
Beta Was this translation helpful? Give feedback.
-
|
I am running into a similar issue. I'm also using VRPN and named my rigid body to 'cf1', and set the streaming ID to 1. However, I am getting the 'No updated pose for CF cf1' warning. I am able to see cf1 in Rviz however. |
Beta Was this translation helpful? Give feedback.
-
|
Please open a separate discussion, unless you have the exact same configuration (motion capture type etc.) |
Beta Was this translation helpful? Give feedback.
-
|
When you run mocap_help, is there data output on the terminal? Does this warning keep appearing? Are there screenshots or photos of the screen?
…------------------ 原始邮件 ------------------
发件人: "Wolfgang ***@***.***>;
发送时间: 2021年12月19日(星期天) 下午5:50
收件人: ***@***.***>;
抄送: ***@***.***>; ***@***.***>;
主题: Re: [USC-ACTLab/crazyswarm] No updated pose for CF cf1.And rviz shows that the plane has taken off. (Discussion #510)
我也遇到了类似的问题。我也在用 VR PN ,将我的刚体命名为‘ cf 1 ’,并将流 ID 设置为 1 。但是,我得到了“ CF cf 1 没有更新姿势”的警告。
—
直接回复此邮件,在 GitHub 上查看或取消订阅.
GitHub Mobile 上的分流通知监督办或机器人.
***@***.***与>
|
Beta Was this translation helpful? Give feedback.
-
|
Yes there is output in my case, I am also able to see my CF in RViz. Mocap_helper is giving me the position of the CF1 as a rigid body.
|
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
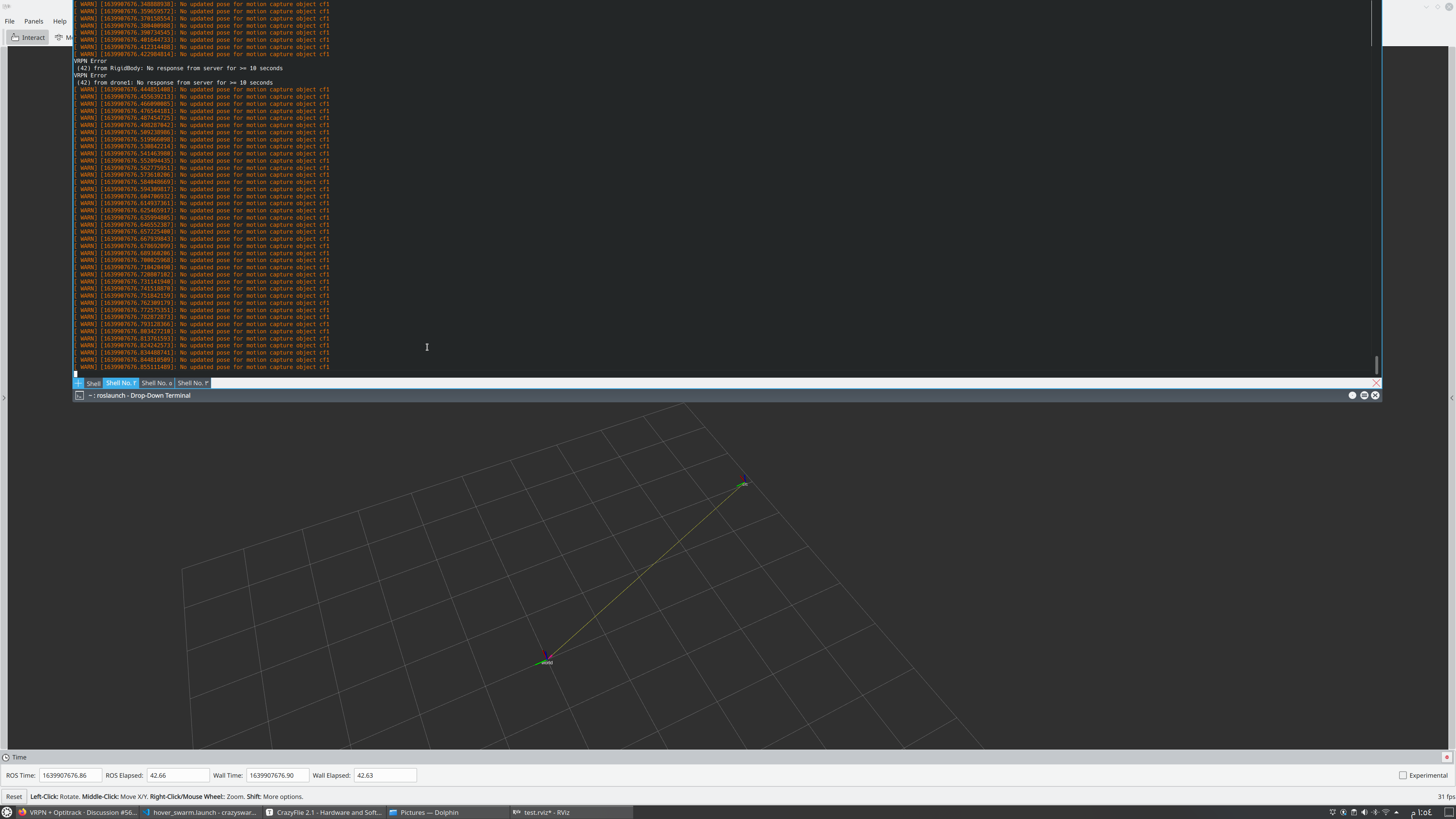
Hi! When hover_swarm.launch is started, the rviz page shows that the plane has taken off. But at this time I am not running any scripts. Just run the hover_swarm.launch startup file. The terminal displays No updated pose for CF cf1.
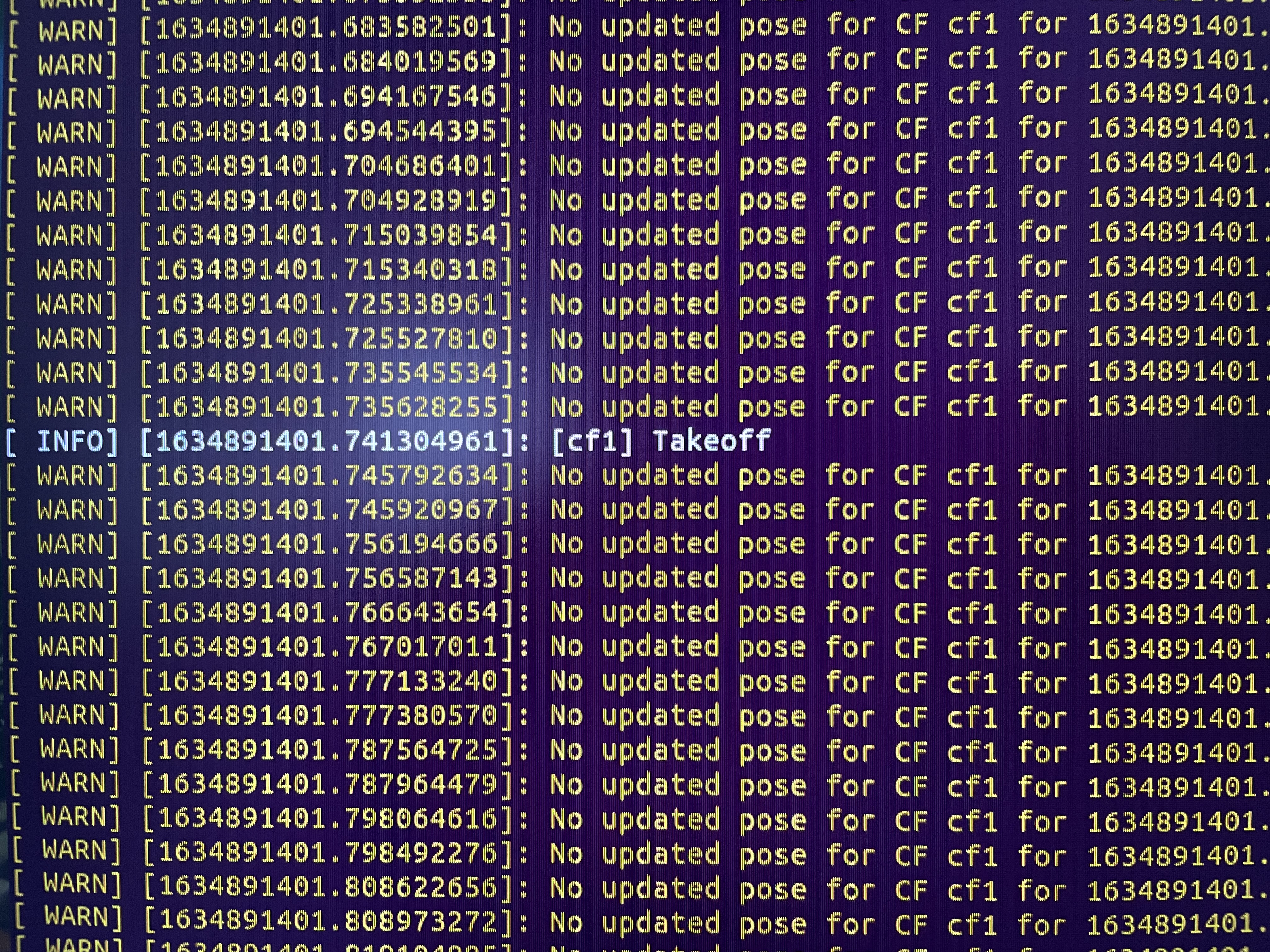
Then I continue to run the hello_world.py script. The plane fell to the ground instantly after taking off. I have been stuck with this problem for a long time. I really hope to get your help!
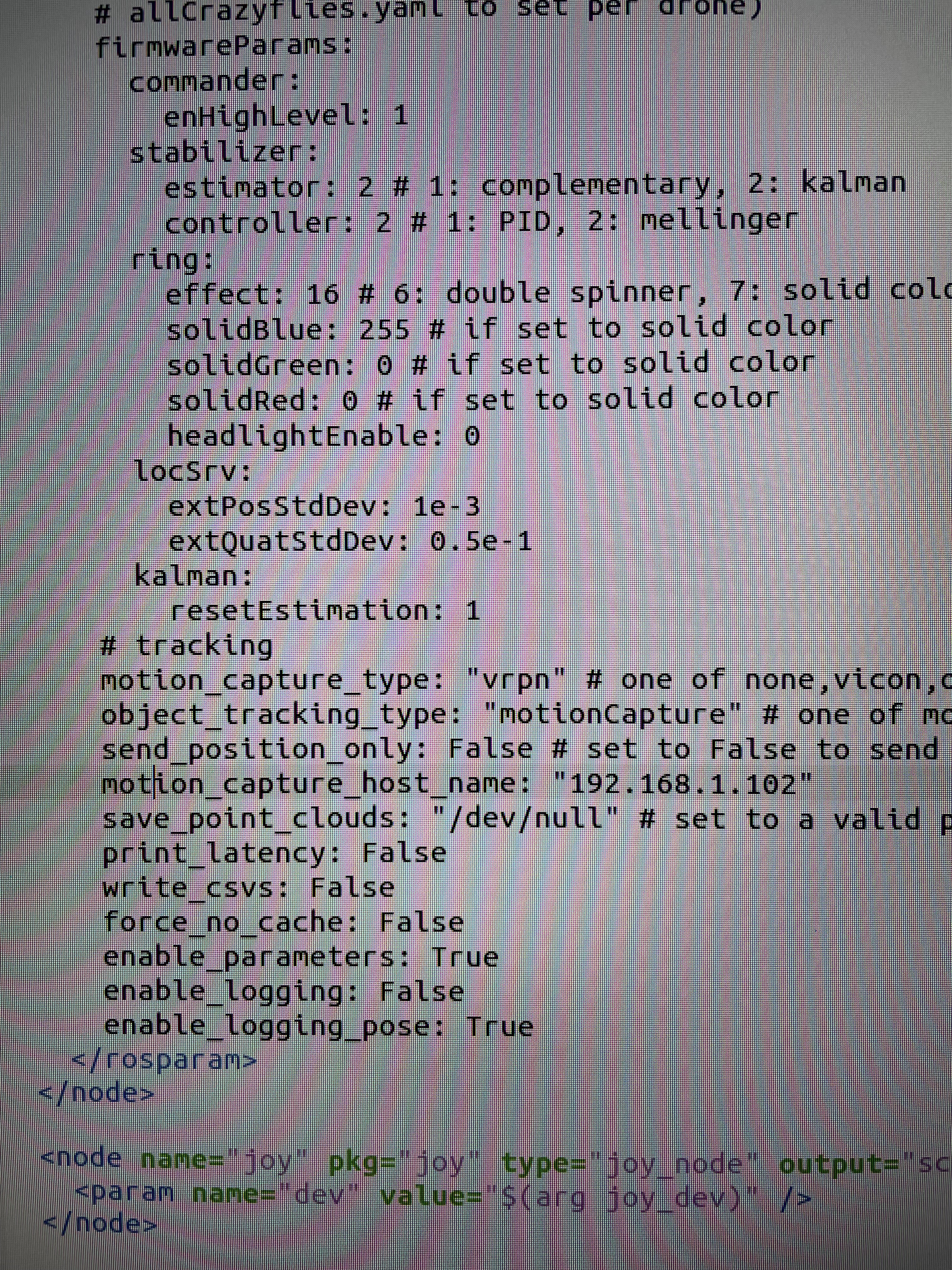
My hover_swarm.launch is shown below:
Beta Was this translation helpful? Give feedback.
All reactions