Replies: 2 comments 1 reply
-
|
I think the problem might be unicast vs. broadcast communication. At which rate do you issue goTo commands and how many Crazyflies are you controlling? There are two solutions:
The current behavior should be improved once we switched to crazyflie-link-cpp as the backend. |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for your answer. I understand "High-level communication" causes the lack of packets. From the above, I think that the maximum number of RAM trajectory uploads may have been reached. In crazyswarm, is there a command to release the trajectory storage area(RAM)? |

Beta Was this translation helpful? Give feedback.
-
|
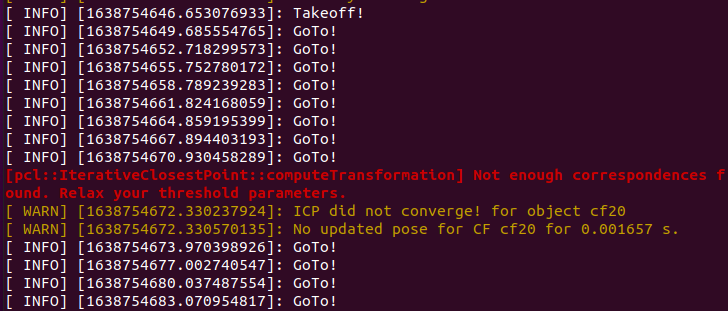
GoTo is executed onboard - there is no trajectory being uploaded. The messages you are seeing indicate that the tracking is not perfect. These warnings can be ignored, however, if they only occur sporadically. The on-board state estimator can handle short outages well. From your initial description, there should be many more warnings reported at the time when the CF flies away? |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Hi @whoenig @jpreiss
I am trying to control a CF using the
goTostatement of the Crazyswarm Python API.The CF is equipped with an LED-Deck to check the communication status.
The CF has an LED-Deck attached to it to check the communication status.
When we run the program and the
goTostatement is executed about 8 times, the LED-Deck light on the CF turns red and flies away slowly.This problem occurs no matter how many times I run the program.
What are the causes of these communication missing?
What is the cause of these communication missing, and how can I control them so that they do not occur?
P.S.
I read this discussion #406, and I wonder if it is not good to use too many
goTostatements, and if it is better to control by trajectory.Beta Was this translation helpful? Give feedback.
All reactions