You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Copy file name to clipboardExpand all lines: papers.md
+1Lines changed: 1 addition & 0 deletions
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -2,6 +2,7 @@ Awesome Papers
2
2
--------------
3
3
4
4
Papers and implementations of papers that could have use in robotics. Implementations here may not be actively developed. While implementations may often be the author's original implementation, that isn't always the case.
5
+
-["Good Robot!": Efficient Reinforcement Learning for Multi-Step Visual Tasks with Sim to Real Transfer](https://github.com/jhu-lcsr/good_robot) - Real robot learns to complete multi-step tasks like table clearing, making stacks, and making rows in <20k simulated actions. [paper](https://arxiv.org/abs/1909.11730) (disclaimer: @ahundt is first author)
5
6
-[Self-Supervised Correspondence in Visuomotor Policy Learning](https://arxiv.org/abs/1909.06933) - 2019 - [video](https://youtu.be/nDRBKb4AGmA)
6
7
-[Grasp2Vec: Learning Object Representations from Self-Supervised Grasping](https://sites.google.com/site/grasp2vec/) - 2018 - 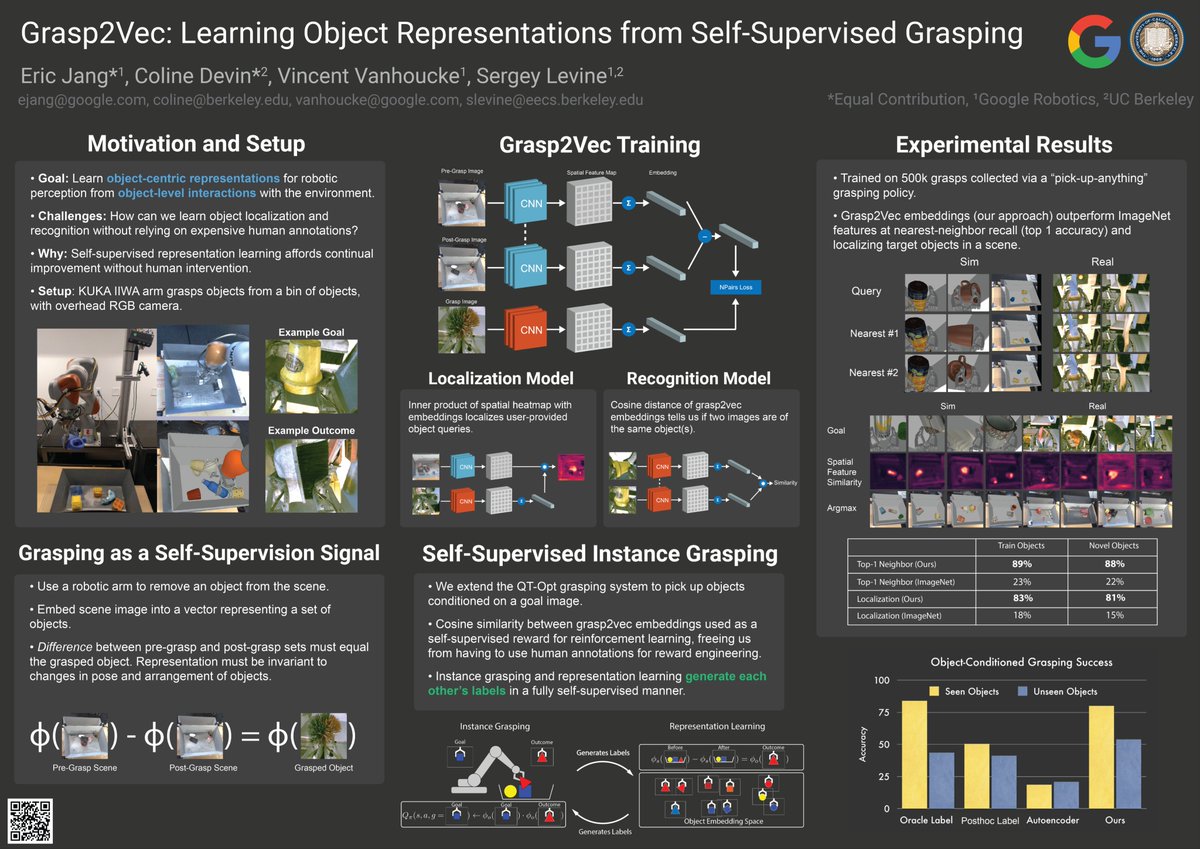 no implementation available
7
8
-[Dense Object Nets: Learning Dense Visual Descriptors by and for Robotic Manipulation](https://github.com/RobotLocomotion/pytorch-dense-correspondence) - 2018 
0 commit comments