Modelling a deformable softbody gripper in pyBullet #3569
Replies: 6 comments
-
|
You can take a look at issue #1432 and #1175 for some conversation around this, but no outward facing progress has been made. I'm working on basic bindings right now. |
Beta Was this translation helpful? Give feedback.
-
|
HI @ashwal have you made any progress on the bindings lately? I am looking for a way to simulate cloth grasping using pybullet. Thanks! |
Beta Was this translation helpful? Give feedback.
-
|
@JanMatas For my uses it ended up being faster just to write in C++ in hacky way. Sorry! |
Beta Was this translation helpful? Give feedback.
-
|
Hi @ashwal |
Beta Was this translation helpful? Give feedback.
-
|
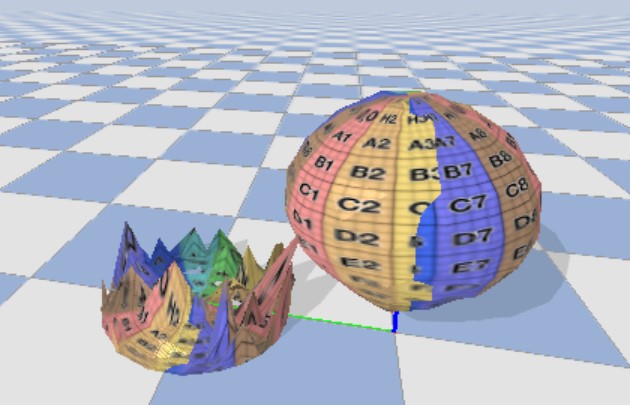
Hello, I saw that simulating a soft body examples but is it possible to load from just .obj files or .vtk format is also needed? For example the ball object (ballId_1) loads properly with .vtk file. On the other hand the ball object (ballId_2) shows unstable weird behavior when only .obj is used, please see the image and code below...
|
Beta Was this translation helpful? Give feedback.
-
|
You might be interested in TACTO. https://github.com/facebookresearch/tacto |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Hi, I was wondering whether a deformable gripper like the GelSight gripper (linked below)can be simulated in pyBullet.
MIT News on GelSight
Arxiv Paper on GelSight
I tried to model a tactile sensor using the getContactPoints API, but it returns only a couple of contact points when gripping objects, which may be attributed to the non-deformability of the solids. Is it possible to expose the softbody simulation capabilities of Bullet in python APIs. In addition, will the collision detection queries work with the softbodies.
Beta Was this translation helpful? Give feedback.
All reactions