You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
For comparison, I managed to get the r2d2 robot that came packaged with PyBullet to go in circles rather than rectangles. My code for it is in hello_pybullet.zip, and the trajectory looks like this:
Without disabling cone friction, the r2d2 robot also had a rectangular trajectory. For some reason, the "disable cone friction" fix solves the problem for the r2d2 robot but does not solve the problem for the race car.
This discussion was converted from issue #2952 on April 26, 2021 03:56.
Heading
Bold
Italic
Quote
Code
Link
Numbered list
Unordered list
Task list
Attach files
Mention
Reference
Menu
reacted with thumbs up emoji reacted with thumbs down emoji reacted with laugh emoji reacted with hooray emoji reacted with confused emoji reacted with heart emoji reacted with rocket emoji reacted with eyes emoji
Uh oh!
There was an error while loading. Please reload this page.
-
Essentially the same issue as #2851.
I took the four-wheeled racecar from here and modified the code and the urdf, both are attached in modified_racecar_files.zip.
I made sure to disable the cone friction, and it didn't help. The trajectory looks like this:
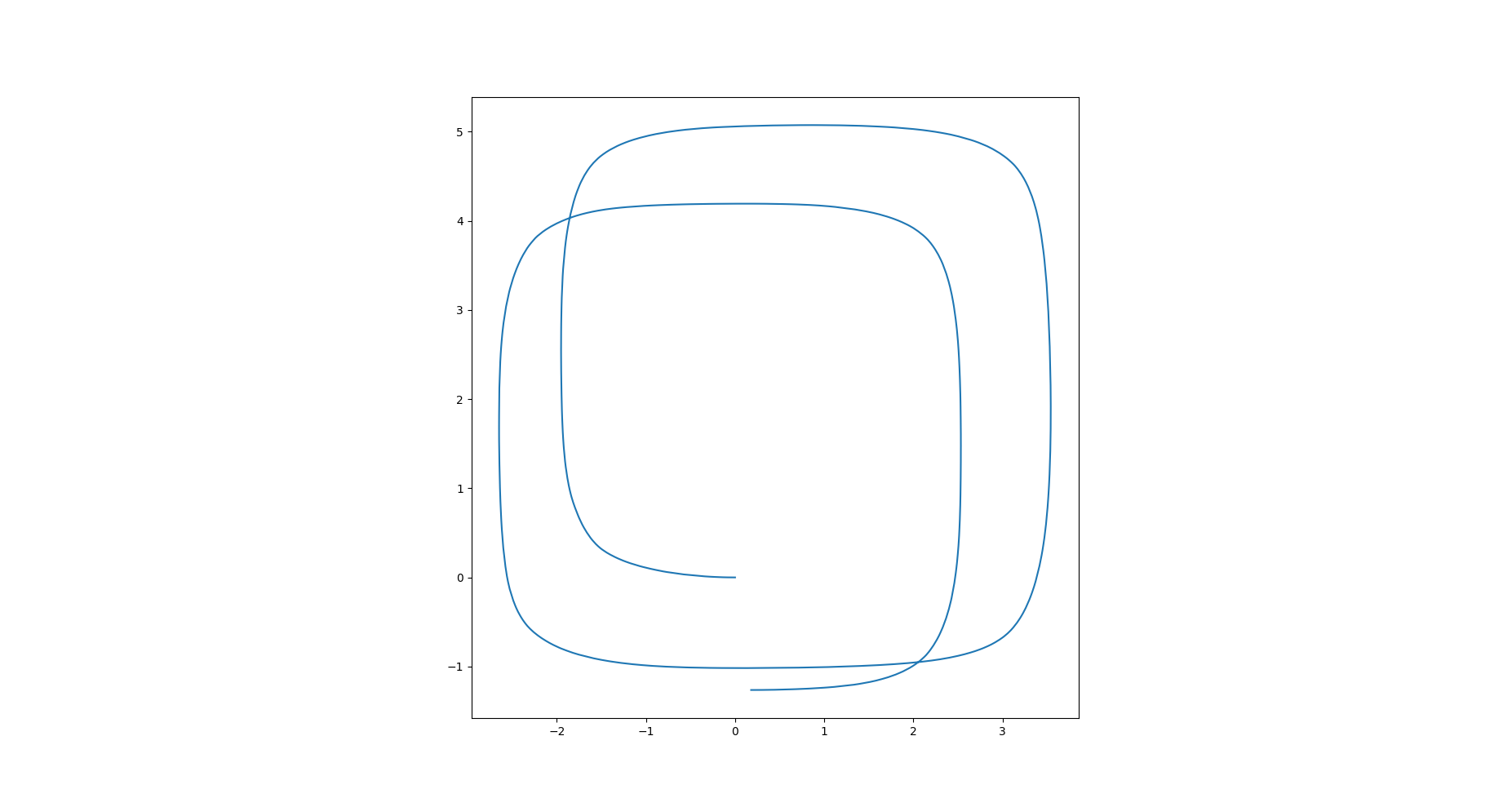
The video of it is here.
For comparison, I managed to get the r2d2 robot that came packaged with PyBullet to go in circles rather than rectangles. My code for it is in hello_pybullet.zip, and the trajectory looks like this:
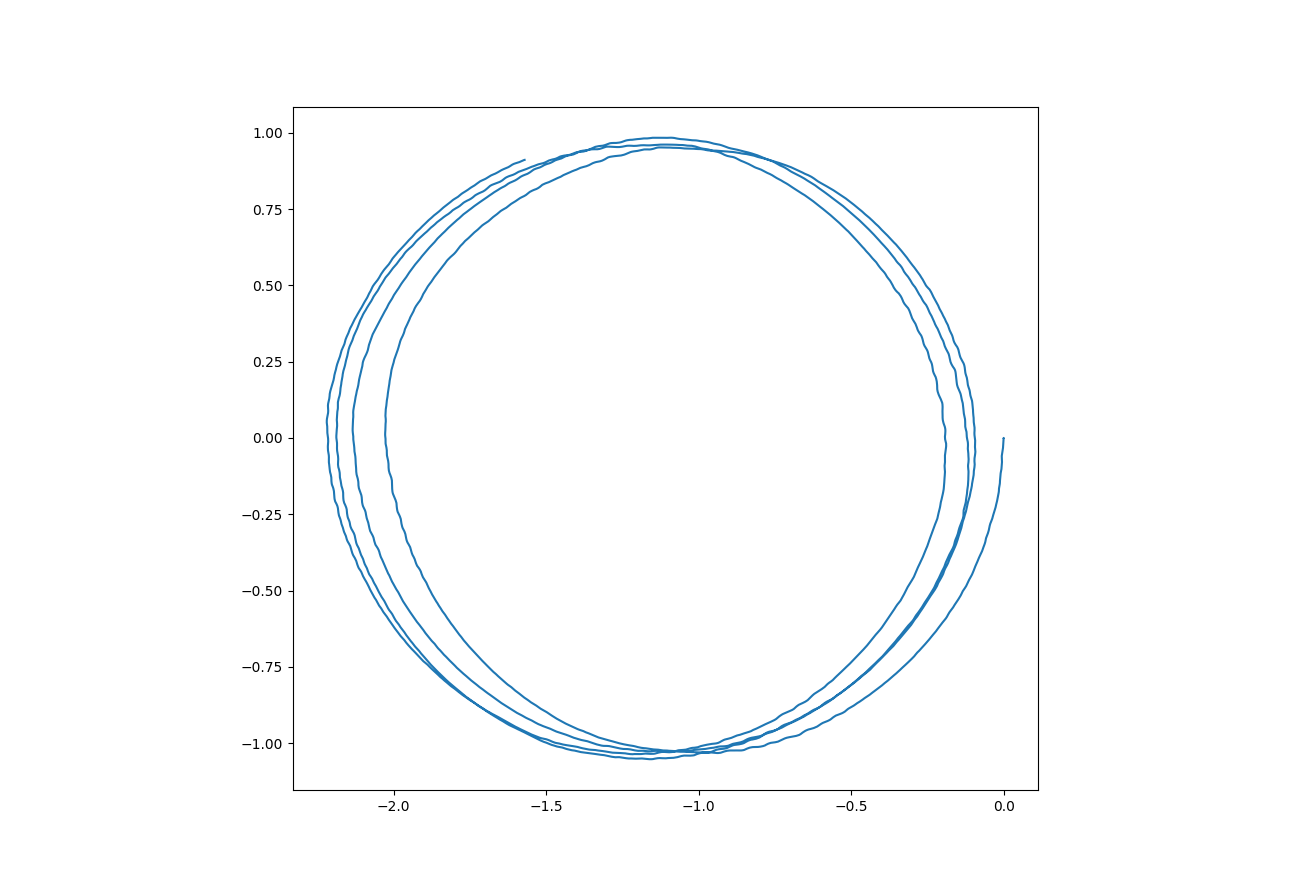
The video is here.
Without disabling cone friction, the r2d2 robot also had a rectangular trajectory. For some reason, the "disable cone friction" fix solves the problem for the r2d2 robot but does not solve the problem for the race car.
Beta Was this translation helpful? Give feedback.
All reactions