Weird behaviour on contact - bodies diffusing into each other #3781
achuwilson
started this conversation in
General
Replies: 1 comment
-
|
It is likely a mass ratio issue with the pgs constraint solver. Did you try a smaller time step and more solver iterations (and small residual threshold)? Or direct solver? If you cannot share, could you modify panda grasp? https://github.com/bulletphysics/bullet3/tree/master/examples/pybullet/gym/pybullet_robots/panda |
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
-
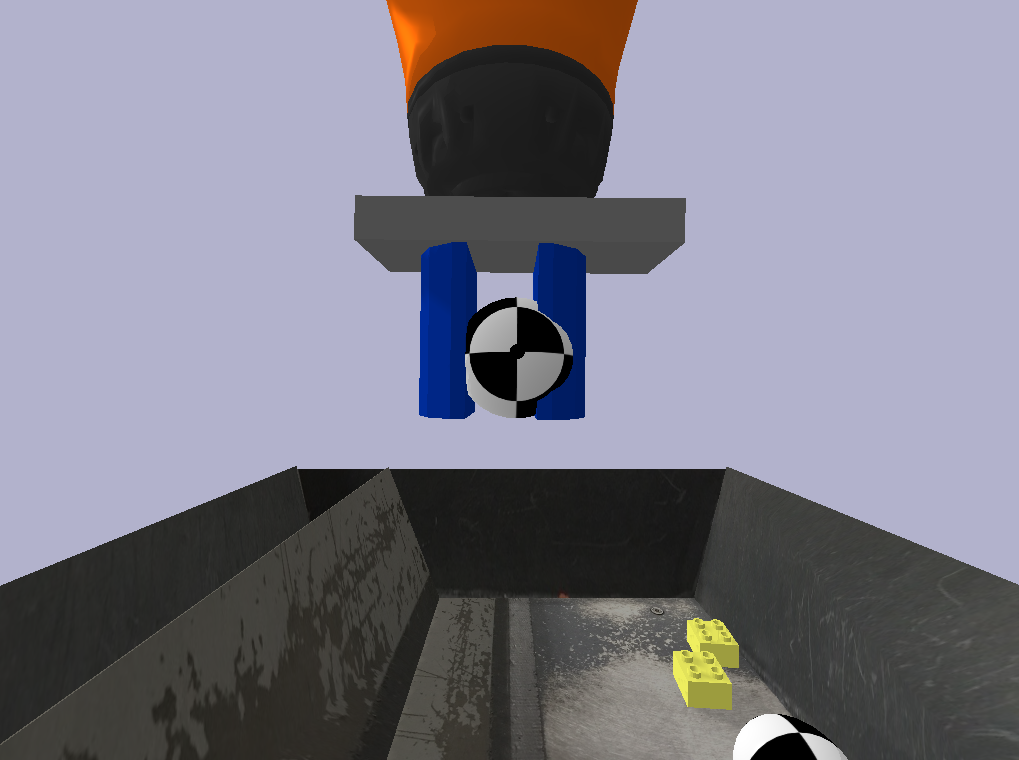
Hi, I am having a weird observation. I designed a simple 2 finger gripper (URDF model with STL meshes) and attached it to the simulated Kuka robot and is trying to pick the checkered sphere given with pybullet_data. I close the gripper by position control, by commanding the fingers to move to the centre position.
When the fingers of the gripper is having a mass of 0.1,(100 grams, which is reasonable), the sphere diffuses into the fingers on grasping as in the following picture.
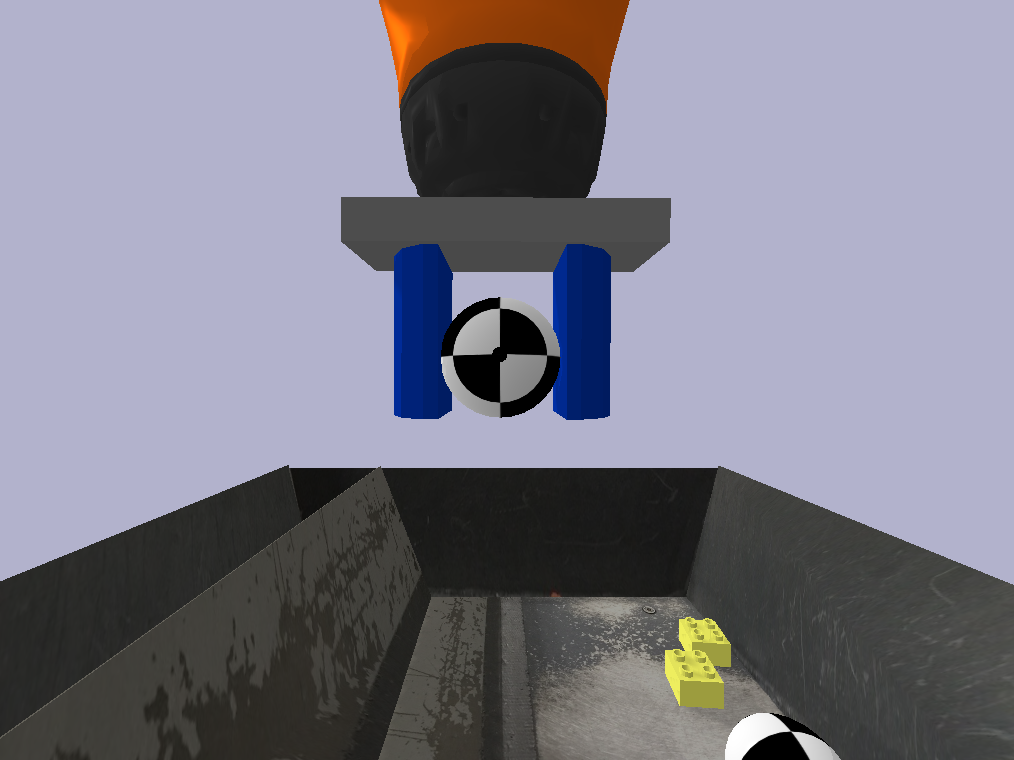
If I reduce the mass of the finger in URDF to 0.0025 ( 2.5 grams, which is unreasonable), it works fine.
What is the reason for this?
Is there any other fix to this apart from modifying the mass of the finger to a non-realistic value?
Beta Was this translation helpful? Give feedback.
All reactions