Replies: 1 comment
-
|
Sadly you wont find much help here, the documentation is really fragmented and with no real way to participate in. |
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
I have found very little information on the outdated documentation and the forums about the best contact parameters for locomotion and reinforcement learning.
Sadly taking the default values from the Bullet Gym locomotion environments results in highly unstable contact dynamics even with very low time-step and a high number of solver iterations. I have found that the
contactERPis highly influential in this, yet I found ZERO information on what this parameter means, and what is its range.Shall we use this thread to solve some of these questions and state the best practices for future users?
For instance,
As for what I can test low contactERP are undesirable for locomotion as contacts like this occur:
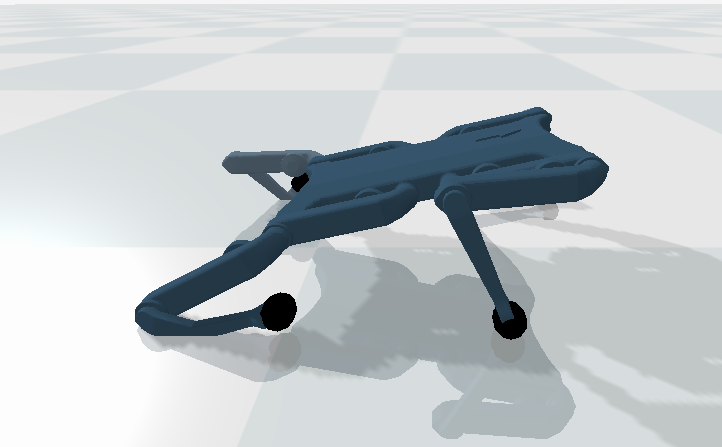
This is with
contactEPR=0.08numSolverIterations=50200HzUPDATE
Beta Was this translation helpful? Give feedback.
All reactions