Replies: 3 comments
-
|
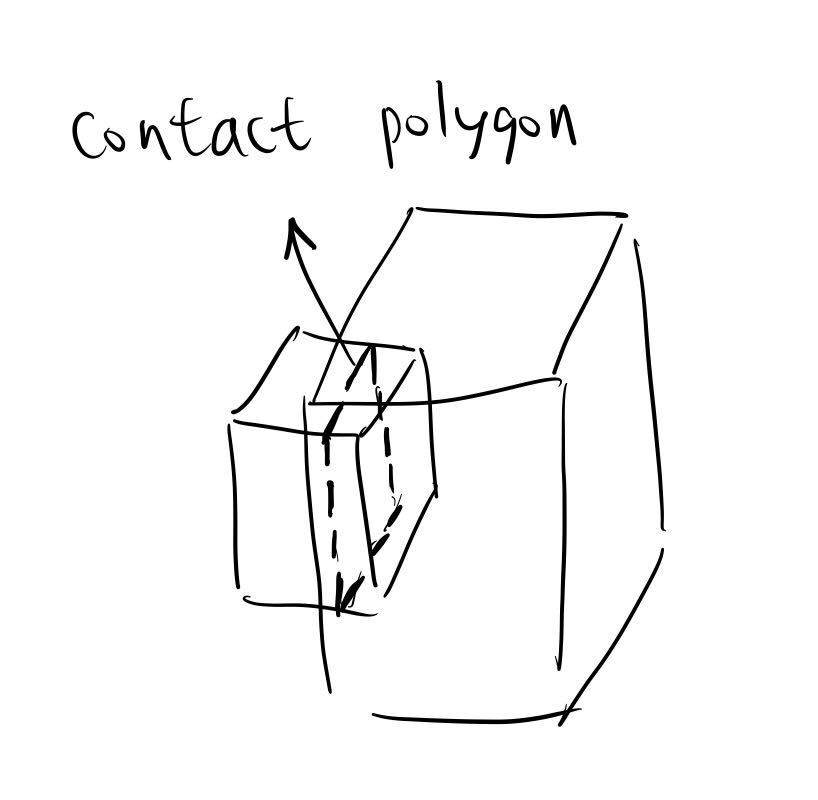
There's a limit of four contact points, which define a contact polygon. As part of collision detection, there is an algorithm which chooses which points to keep as to maximize the area of the contact polygon. |
Beta Was this translation helpful? Give feedback.
-
|
Just to confirm, is the contact polygon the intersection surface between the two rigid bodies, as shown in the figure below? Do you mind sharing a reference to the code/algorithm that you talked about? Many thanks!
|
Beta Was this translation helpful? Give feedback.
-
|
Yes, pretty much. In your example, there should be 4 contact points, one at each vertex of the dashed rectangle. |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
Hi everyone, I am trying to understand the function getContactPoints. If two solid bodies (meshes) penetrate, there should be an infinite number of contact points. Imagine two triangular faces intersect at a line and the line will contain infinite number of points. How does this function handle it so that it does not return infinite number of contact points? Thanks a lot!
Beta Was this translation helpful? Give feedback.
All reactions