WINDOWS에서도 GIT 소스를 GUI로 편리하게 관리할 수 있는 TOOL
1.GitHub Desktop 을 실행합니다.
(설치 안하신분들은 여기 링크 참고하셔서 Github Desktop 을 설치하세요.)
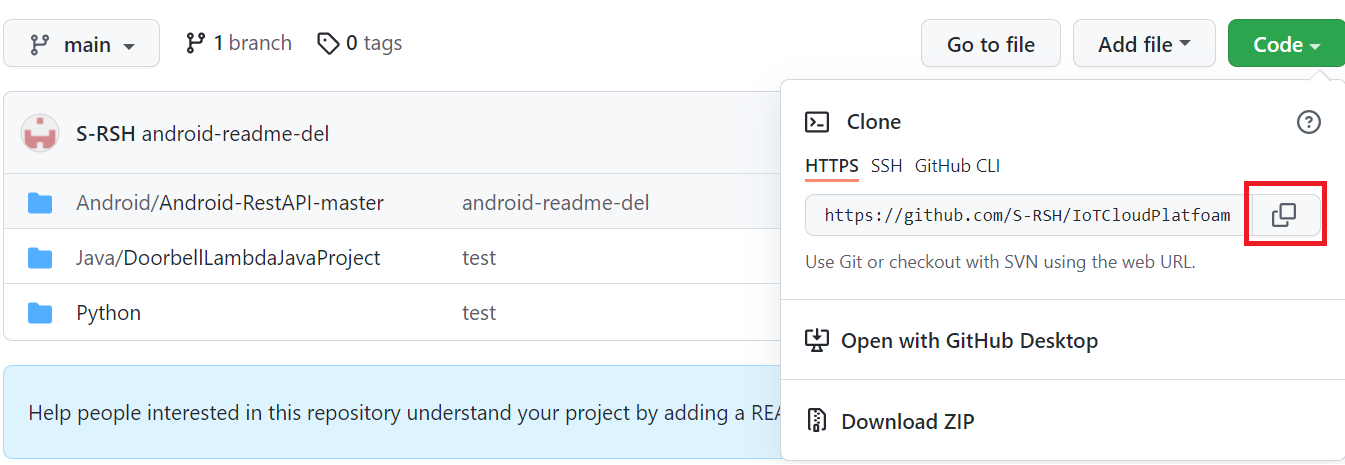
2.Clone 하려는 github 의 repository url 을 복사합니다.
복사하니 https://github.com/S-RSH/IoTCloudPlatfoam.git가 나옵니다.
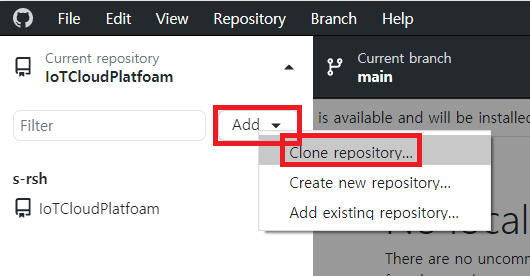
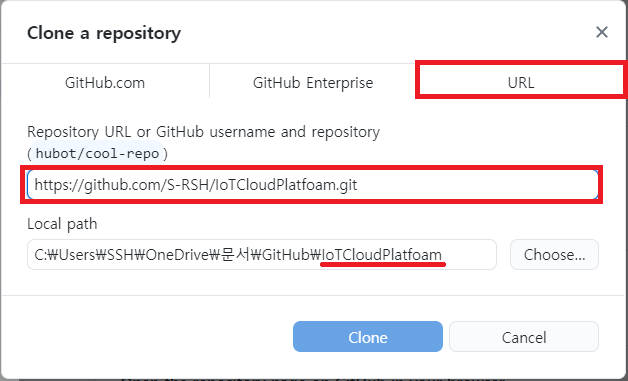
3.GitHub Desktop 에서 Add -> Clone repository 를 클릭합니다.

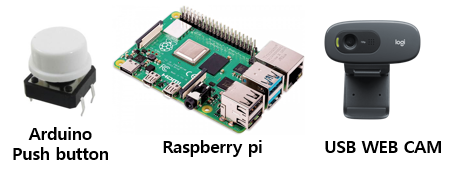
Raspberry Pi 4B에 3가지를 다운로드 했다. AWS CLI, Boto3, Open CV.
AWS CLI - AWS를 커맨드로 사용하기 위해 다운한다.
Boto3 - Python용 AWS SDK이다. Boto3를 사용하면 Python Script를 AWS S3, DynamoDB, SNS 등 AWS 서비스와 쉽게 연동할 수 있다.
Open CV - Open CV 오픈 소스 중에서 videocapture 클래스를 이용하여 카메라 입력과 동영상 파일 처리를 하기 위해 사용하였다.
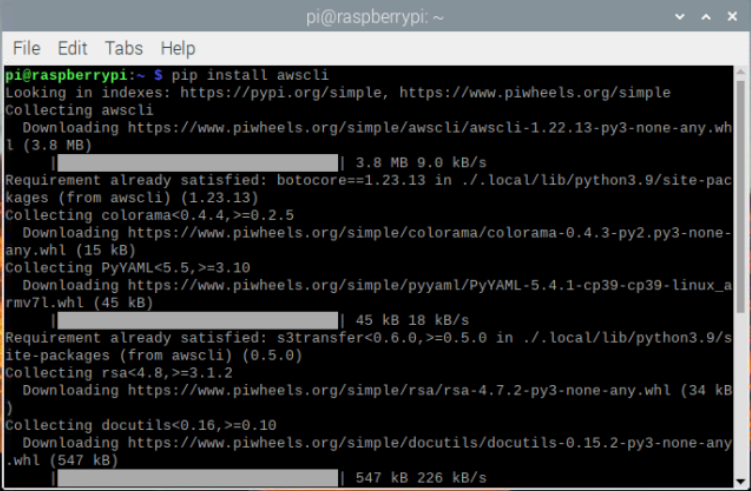
Raspberry Pi termianl을 열고 다음과 같은 코드를 작성한다.
pip3 install awscli
IAM Console 인증을 사용하였다.
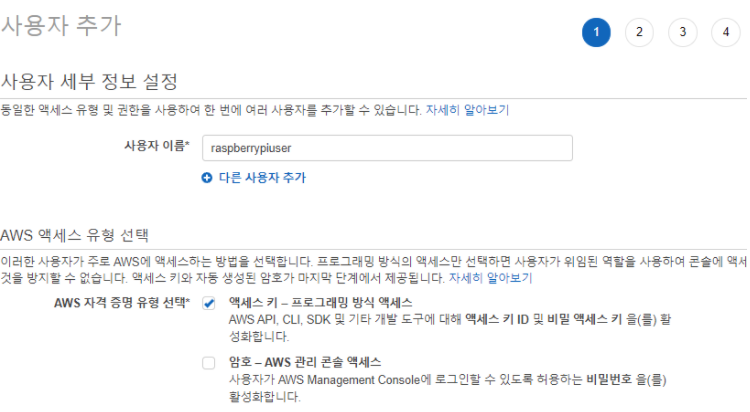
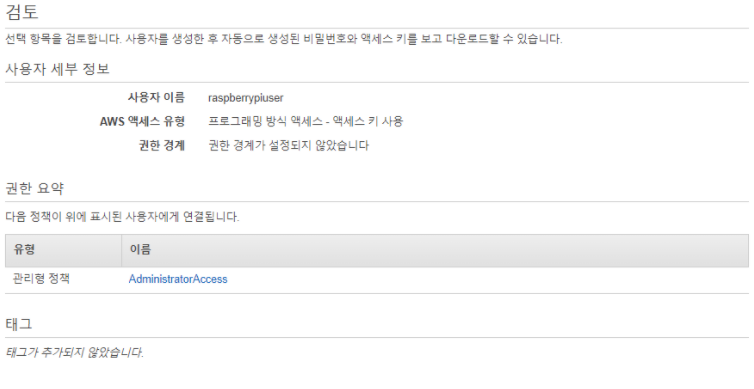
1.IAM 사용자 생성
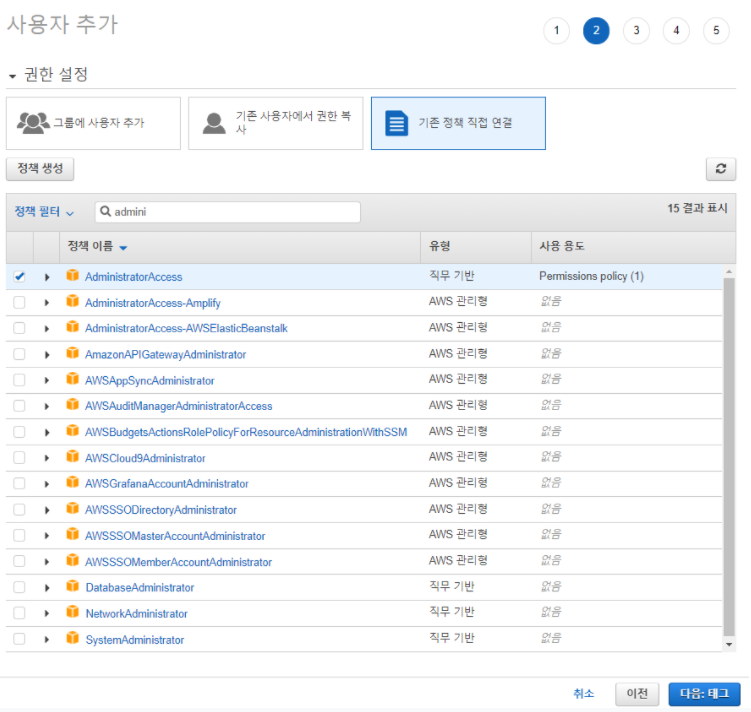
여러 옵션이 나온다. 사용해야할 정책들을 이미 정했다면 해당 정책을 사용한다. 잘모르겠다면 AdministratorAccess을 선택한다. 최고 권한을 가진 정책이기 때문에 하고 싶은 기능을 모두 이용할 수 있다. 정책을 선택했다면 다음으로 넘어간다.
2.Raspberry Pi 4B 사용자 설정 하기
aws configure
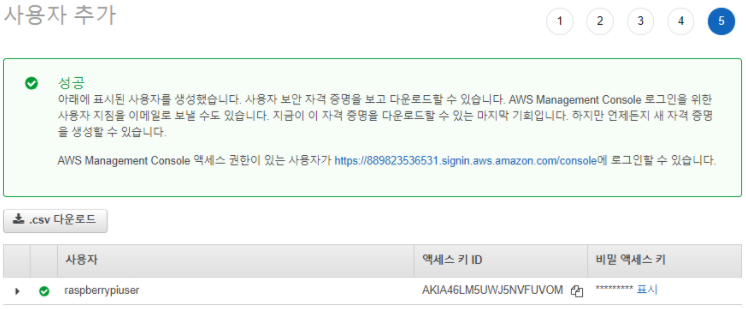
위 코드를 입력하면 Access Key ID를 입력하라고 한다. '1.IAM 사용자 생성'에서 생성한 액세스 키 ID를 복사하여 입력해준다. 입력하면 비밀 액세스 키도 입력하라고 한다. 비밀 액세스 키를 복사하여 입력해준다.
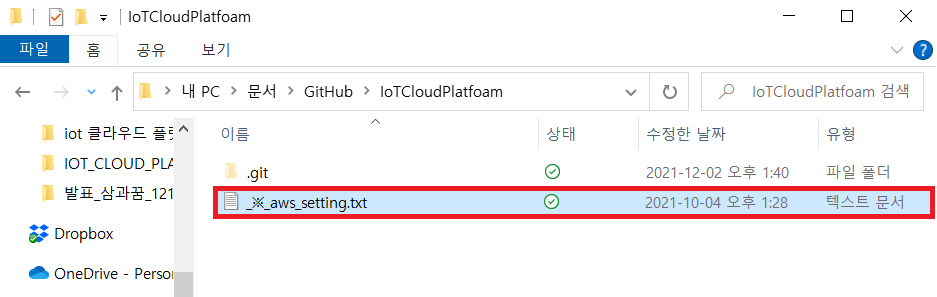
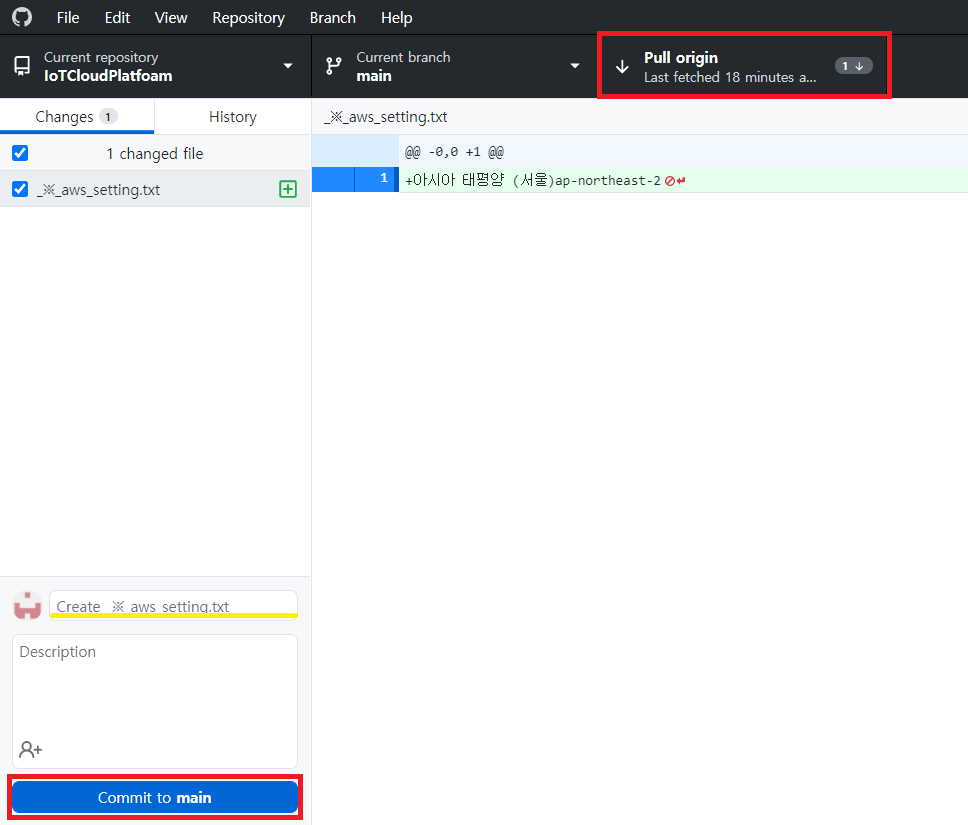
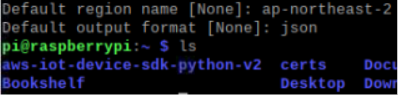
다음으로 지역을 입력하라고 나오는데 우리의 지역은 서울이므로 'ap-northeast-2'를 복사해서 입력한다. 그후 output format을 입력하라고 하는데 json을 많이 사용하므로 josn을 입력한다. 해당 과정을 마무리 하면 다음 사진과 같이 폴더가 새로 생성된 것을 확인할 수 있다.

Boto3는 pytho 3.6버전 이상부터 사용된다.
python3 --version
이 코드를 통해 현재 파이썬 버전을 확인한다. 3.6이상이 아니라면 업데이트를 필수로 해야한다. 3.6이상 버전인 것을 확인했다면 설치를 시작한다.
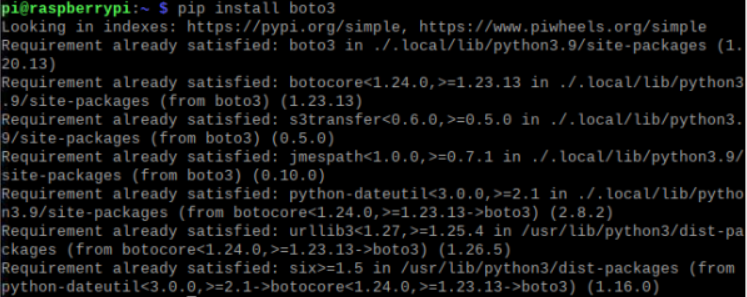
sudo pip3 install boto3
터미널에 사진과 같은 상황을 통해 설치가 완료된다.
1.이전 버전의 Open CV 제거하기
Open CV 이전 버전이 설치되어 있으면 새로 설치하는 Open CV 4.5.1 버전이 제대로 동작하지 않기 때문에 제거해주어야한다.
pkg-config --modversion opencv
이 코드를 통해 현재 Open CV 버전을 확인한다. 만약 설치가 되어 있지 않다면 설치를 해주어야한다.(이 경우 2번을 진행한다.) 이전 버전이 설치되어 있는 경우라면 삭제한다.
다음 명령으로 Open CV 라이브러리 설정 파일을 포함해서 기존에 설치된 Open CV 패키지를 삭제하고 진행해야 합니다. 코드는 아래와 같습니다.
sudo apt-get purge libopencv* python-opencv
sudo apt-get autoremove
컴파일하여 설치한 경우 다음처럼 Open CV 버전을 확인할 수 있습니다.
pi@raspberrypi:~ $ pkg-config --modversion opencv
3.4.2
또는
pi@raspberrypi:~ $ pkg-config --modversion opencv4
4.5.1
다음 명령으로 기존에 설치된 Open CV 라이브러리를 삭제합니다.
sudo find /usr/local/ -name "*opencv*" -exec rm {} \;
2.기존 설치된 패키지 업그레이드 OpenCV 4.5.1을 설치해주기 전에 기존에 설치된 패키지들을 업그레이드 해주기 위한 작업입니다.
기존에 설치된 패키지의 새로운 버전이 저장소에 있다면 패키지 리스트를 업데이트합니다.
sudo apt update
이후 재부팅을 해줍니다.
sudo reboot
3.Open CV 컴파일 전 필요한 패키지 설치 Open CV를 컴파일하는데 필요한 패키지들을 설치합니다.
build-essential 패키지에는 C/C++ 컴파일러와 관련 라이브러리, make 같은 도구들이 포함되어 있습니다.
cmake는 컴파일 옵션이나 빌드된 라이브러리에 포함시킬 OpenCV 모듈 설정등을 위해 필요합니다.
sudo apt install build-essential cmake
특정 포맷의 이미지 파일을 불러오거나 저장하기 위해 필요한 패키지들입니다.
sudo apt install libjpeg-dev libtiff5-dev libjasper-dev libpng-dev
특정 코덱의 비디오 파일/스트리밍을 읽어오거나 기록하기 위해 필요한 FFmpeg 관련 패키지들입니다.
sudo apt install libjpeg-dev libtiff5-dev libjasper-dev libpng-dev
Video4Linux 패키지는 리눅스에서 실시간 비디오 캡처를 지원하기 위한 디바이스 드라이버와 API를 포함하고 있습니다.
sudo apt install libv4l-dev v4l-utils
특정 코덱의 비디오 파일/스트리밍을 읽어오거나 기록하기 위해 필요한 GStreamer 관련 패키지들입니다.
sudo apt install libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly
OpenCV에서는 highgui 모듈을 사용하여 자체적으로 윈도우 생성하여 이미지나 영상을 보여줍니다.
윈도우 생성 등의 GUI를 위해 gtk 또는 qt를 선택해서 사용가능합니다. 본 글에서는 gtk2를 사용합니다.
sudo apt install libgtk2.0-dev
OpenGL 지원하기 위해 필요한 라이브러리입니다.
sudo apt install mesa-utils libgl1-mesa-dri libgtkgl2.0-dev libgtkglext1-dev
OpenCV 최적화를 위해 사용되는 라이브러리들입니다.
sudo apt install libatlas-base-dev gfortran libeigen3-dev
python2.7-dev와 python3-dev 패키지는 파이썬을 위한 헤더파일과 라이브러리가 포함된 패키지들입니다.
Numpy는 매트릭스 연산등을 빠르게 처리할 수 있어서 OpenCV Python에서 사용됩니다.
sudo apt install python3-dev python3-numpy
4.Open CV 설정과 컴파일 및 설치 소스 코드를 저장할 임시 디렉토리를 생성하여 이동 후 진행합니다
mkdir opencv
cd opencv
~/opencv $
OpenCV 4.5.1 소스코드를 다운로드 받아 압축을 풀어줍니다.
wget -O opencv.zip https://github.com/opencv/opencv/archive/4.5.1.zip
unzip opencv.zip
opencv_contrib(extra modules) 소스코드를 다운로드 받아 압축을 풀어줍니다.
SURF 등을 사용하기 위해 필요합니다.
wget -O opencv_contrib.zip https://github.com/opencv/opencv_contrib/archive/4.5.1.zip
unzip opencv_contrib.zip
다음처럼 두 개의 디렉토리가 생성됩니다.
pi@raspberrypi:~/opencv $ ls -d */
opencv-4.5.1 opencv_contrib-4.5.1
opencv-4.5.1 디렉토리로 이동하여 build 디렉토리를 생성하고 build 디렉토리로 이동합니다.
컴파일은 build 디렉토리에서 이루어집니다.
pi@raspberrypi:~/opencv $ cd opencv-4.5.1
pi@raspberrypi:~/opencv/opencv-4.5.1 $ mkdir build
pi@raspberrypi:~/opencv/opencv-4.5.1 $ cd build
pi@raspberrypi:~/opencv/opencv-4.5.1/build $
cmake를 사용하여 OpenCV 컴파일 설정을 해줍니다. 복사해서 터미널에 붙여넣기 해주면 됩니다.

cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D WITH_TBB=OFF -D WITH_IPP=OFF -D WITH_1394=OFF -D BUILD_WITH_DEBUG_INFO=OFF -D BUILD_DOCS=OFF -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D ENABLE_NEON=ON -D ENABLE_VFPV3=ON -D WITH_QT=OFF -D WITH_GTK=ON -D WITH_OPENGL=ON -D OPENCV_ENABLE_NONFREE=ON -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.5.1/modules -D WITH_V4L=ON -D WITH_FFMPEG=ON -D WITH_XINE=ON -D ENABLE_PRECOMPILED_HEADERS=OFF -D BUILD_NEW_PYTHON_SUPPORT=ON -D OPENCV_GENERATE_PKGCONFIG=ON ../
다음처럼 cmake 실행 중에 추가적인 다운로드가 있습니다.
라즈베리파이에 인터넷이 연결된 상태에서 진행하세요.
-- xfeatures2d/boostdesc: Download: boostdesc_bgm.i
-- xfeatures2d/boostdesc: Download: boostdesc_bgm_bi.i
-- xfeatures2d/boostdesc: Download: boostdesc_bgm_hd.i
-- xfeatures2d/boostdesc: Download: boostdesc_binboost_064.i
-- xfeatures2d/boostdesc: Download: boostdesc_binboost_128.i
-- xfeatures2d/boostdesc: Download: boostdesc_binboost_256.i
-- xfeatures2d/boostdesc: Download: boostdesc_lbgm.i
-- xfeatures2d/vgg: Download: vgg_generated_48.i
-- xfeatures2d/vgg: Download: vgg_generated_64.i
-- xfeatures2d/vgg: Download: vgg_generated_80.i
-- xfeatures2d/vgg: Download: vgg_generated_120.i
-- data: Download: face_landmark_model.dat
다음과 같은 메시지가 보이면 정상적으로 된 것입니다.
-- Configuring done
-- Generating done
-- Build files have been written to: /home/pi/opencv/opencv-4.5.1/build
진행하기 전에 스왑(swap) 공간을 늘려줘야 멀티코어를 사용하여 컴파일시 메모리 부족으로 에러가 나지 않습니다.
/etc/dphys-swapfile 파일을 열어서
sudo nano /etc/dphys-swapfile
CONF_SWAPSIZE 변수값을 100에서 2048로 수정합니다.
Ctrl + O를 눌러 저장하고 Ctrl + X를 눌러 빠져나옵니다.
스왑 서비스 재시작하여 변경된 설정을 반영시켜주면 스왑 크기가 대략 20배가 됩니다.
스왑 관련 서비스를 재시작합니다
pi@raspberrypi:~/opencv/opencv-4.5.1/build $ sudo /etc/init.d/dphys-swapfile restart
[ ok ] Restarting dphys-swapfile (via systemctl): dphys-swapfile.service.
이제 make 명령을 사용하여 컴파일을 시작합니다. -j4 옵션을 주고 우선 진행합니다.
time make -j4
이제 컴파일 결과물을 설치합니다. 샘플 코드들은 /usr/local/share/opencv4/samples/ 위치에 복사됩니다.
sudo make install
opencv 라이브러리를 찾을 수 있도록 다음 명령을 실행합니다.
sudo ldconfig
/etc/dphys-swapfile 파일을 열어서
sudo nano /etc/dphys-swapfile
CONF_SWAPSIZE 변수값을 다시 100으로 수정합니다.
스왑 서비스 재시작하여 변경된 설정을 반영시켜주면 스왑 크기가 원래대로 돌아옵니다.
pi@raspberrypi:~/opencv/opencv-4.5.1/build $ sudo /etc/init.d/dphys-swapfile restart
[ ok ] Restarting dphys-swapfile (via systemctl): dphys-swapfile.service.
5.Open CV 설치 결과 확인
python 3에서 opencv 라이브러리를 사용가능한지는 확인합니다.
OpenCV 버전이 출력되어야 합니다.
pi@raspberrypi:~/opencv/opencv-4.5.1/build $ python3
Python 3.9.2 (default, Mar 12 2021, 04:06:34)
[GCC 10.2.1 20210110] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import cv2
>>> cv2.__version__
'4.5.1'
>>> quit()
예제 코드를 실행해봅니다. 웹캠 영상을 볼 수 있습니다.
$ python3 /usr/local/share/opencv4/samples/python/video.py
다음과 같은 에러가 발생합니다.
[ WARN:0] global /home/pi/opencv/opencv-4.5.1/modules/videoio/src/cap_gstreamer.cpp (935) open OpenCV | GStreamer warning: Cannot query video position: status=0, value=-1, duration=-1
수정해봅시다. OpenCV에서 있는 것으로 진행해보았습니다. video.py 파일을 열어서
$ nano video.py
188번째 줄을 다음처럼 수정합니다. Ctrl + O로 저장후, Ctrl + X로 종료합니다.
cap = cv.VideoCapture(source, cv.CAP_V4L2)
실행해봅니다. 경고문 없이 영상이 바로 보입니다.
$ python video.py
$ python3 video.py
이제 필요 없어진 컴파일에 사용했던 opencv 소스코드 디렉토리를 삭제합니다.
pi@raspberrypi:~/opencv/opencv-4.5.1/build $ cd
pi@raspberrypi:~ $ rm -rf opencv