操作系统:I/O 基础 #9
Description
计算机IO模型详解:原理、特点、应用场景及深层思想
1. IO模型概述
IO(输入/输出)是计算机系统中最基础的操作之一,它处理计算机与外部设备或系统间的数据交换。由于IO操作通常需要与速度较慢的外部设备交互,因此IO操作往往成为计算机系统性能的瓶颈。为了解决这一问题,计算机系统发展出了不同的IO模型,以满足不同场景下对性能、并发和资源利用的需求。
在计算机系统中,IO操作主要涉及两个阶段:
- 等待数据就绪:从外部设备收集数据(例如,从网卡接收数据包、从磁盘读取文件等)
- 数据复制:将数据从内核空间复制到用户空间
基于这两个阶段如何处理,IO模型可以分为五种基本类型:阻塞IO、非阻塞IO、IO多路复用、信号驱动IO和异步IO。不同模型在这两个阶段的处理方式决定了它们的效率和适用场景。
2. 同步IO与异步IO的概念区分
在深入了解具体IO模型前,需要先理清同步/异步与阻塞/非阻塞的概念,因为这些概念在IO模型讨论中经常出现,但容易混淆。
2.1 同步与异步的本质区别
同步IO:指在IO操作完成前,用户进程必须等待IO操作的结果,期间可能处于阻塞或非阻塞状态。同步IO的特点是用户进程主动等待并获取IO操作结果。
异步IO:指用户进程发起IO请求后,可以继续执行其他任务,操作系统会在IO操作完成后通过回调或信号等方式通知用户进程。异步IO的特点是用户进程被动接收IO操作结果。
同步与异步的区别主要在于:数据复制阶段是否需要用户进程参与。在同步IO模型中,无论等待数据就绪阶段如何,数据复制阶段都需要用户进程参与;而在异步IO模型中,两个阶段都不需要用户进程参与。
2.2 阻塞与非阻塞的区别
阻塞:指调用IO操作后,进程会挂起(暂停执行),直到IO操作完成或等待信息返回。
非阻塞:指调用IO操作后,函数会立即返回,不会使进程挂起,进程可以继续执行其他任务。
阻塞与非阻塞主要影响的是用户进程在等待数据就绪阶段的状态:是被挂起还是可以继续执行。
3. 五种IO模型详解
接下来我们详细介绍Linux/Unix系统中的五种IO模型。
3.1 阻塞IO模型(Blocking IO)
3.1.1 工作原理
阻塞IO是最传统的IO模型。当应用程序发起IO请求时,线程会被阻塞,直到IO操作完成才返回。
工作流程:
- 用户进程调用recvfrom等IO系统调用
- 如果数据未就绪,内核让进程进入阻塞状态
- 内核等待数据就绪(如等待网络数据到达)
- 数据就绪后,内核将数据从内核空间复制到用户空间
- 复制完成后,内核唤醒用户进程,IO系统调用返回

3.1.2 代码示例(C++)
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <string.h>
#include <iostream>
int main() {
int server_fd = socket(AF_INET, SOCK_STREAM, 0);
if (server_fd == -1) {
std::cerr << "Socket creation failed" << std::endl;
return -1;
}
struct sockaddr_in address;
memset(&address, 0, sizeof(address));
address.sin_family = AF_INET;
address.sin_addr.s_addr = INADDR_ANY;
address.sin_port = htons(8080);
if (bind(server_fd, (struct sockaddr *)&address, sizeof(address)) < 0) {
std::cerr << "Bind failed" << std::endl;
return -1;
}
if (listen(server_fd, 3) < 0) {
std::cerr << "Listen failed" << std::endl;
return -1;
}
std::cout << "Server listening on port 8080..." << std::endl;
while (true) {
struct sockaddr_in client_addr;
socklen_t client_len = sizeof(client_addr);
// 阻塞在accept调用,直到有客户端连接
int client_fd = accept(server_fd, (struct sockaddr *)&client_addr, &client_len);
if (client_fd < 0) {
std::cerr << "Accept failed" << std::endl;
continue;
}
char buffer[1024] = {0};
// 阻塞在recv调用,直到接收到数据或连接关闭
int bytes_read = recv(client_fd, buffer, sizeof(buffer), 0);
if (bytes_read > 0) {
std::cout << "Received: " << buffer << std::endl;
send(client_fd, buffer, bytes_read, 0); // 回显数据
}
close(client_fd);
}
close(server_fd);
return 0;
}3.1.3 特点与优缺点
特点:
- 最简单直观的IO模型
- 实现简单,开发效率高
- 每个连接需要一个独立线程处理
优点:
- 程序设计简单明了,易于理解和调试
- 对于低并发场景,资源消耗相对较低
- 适合CPU密集型任务
缺点:
- 线程在IO操作期间无法执行其他任务,CPU利用率低
- 不适合高并发场景,大量连接会导致大量线程创建,增加系统开销
- 线程切换成本高,资源消耗大
3.1.4 应用场景
阻塞IO模型适合:
- 连接数量有限的简单应用
- 客户端应用程序
- 对实时性要求不高的系统
- 学习和理解基础网络编程的场景
3.2 非阻塞IO模型(Non-blocking IO)
3.2.1 工作原理
非阻塞IO模型允许进程在IO操作未完成时继续执行其他任务,而不是被阻塞。进程需要不断轮询检查IO操作是否完成。
工作流程:
- 用户进程将文件描述符设为非阻塞模式,然后调用recvfrom等IO系统调用
- 如果数据未就绪,内核立即返回一个错误码(如EAGAIN或EWOULDBLOCK)
- 用户进程需要不断轮询检查数据是否就绪
- 当数据就绪时,内核将数据从内核空间复制到用户空间
- 复制完成后,系统调用成功返回

3.2.2 代码示例(C++)
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#include <string.h>
#include <iostream>
int main() {
int server_fd = socket(AF_INET, SOCK_STREAM, 0);
if (server_fd == -1) {
std::cerr << "Socket creation failed" << std::endl;
return -1;
}
// 设置socket为非阻塞模式
int flags = fcntl(server_fd, F_GETFL, 0);
fcntl(server_fd, F_SETFL, flags | O_NONBLOCK);
struct sockaddr_in address;
memset(&address, 0, sizeof(address));
address.sin_family = AF_INET;
address.sin_addr.s_addr = INADDR_ANY;
address.sin_port = htons(8080);
if (bind(server_fd, (struct sockaddr *)&address, sizeof(address)) < 0) {
std::cerr << "Bind failed" << std::endl;
return -1;
}
if (listen(server_fd, 3) < 0) {
std::cerr << "Listen failed" << std::endl;
return -1;
}
std::cout << "Server listening on port 8080..." << std::endl;
int client_fds[10] = {0}; // 最多处理10个连接
int max_clients = 10;
while (true) {
// 尝试接受新连接(非阻塞)
struct sockaddr_in client_addr;
socklen_t client_len = sizeof(client_addr);
int new_fd = accept(server_fd, (struct sockaddr *)&client_addr, &client_len);
if (new_fd >= 0) {
// 设置新客户端socket为非阻塞
int flags = fcntl(new_fd, F_GETFL, 0);
fcntl(new_fd, F_SETFL, flags | O_NONBLOCK);
// 保存新连接的文件描述符
for (int i = 0; i < max_clients; i++) {
if (client_fds[i] == 0) {
client_fds[i] = new_fd;
std::cout << "New connection, fd: " << new_fd << std::endl;
break;
}
}
} else if (errno != EAGAIN && errno != EWOULDBLOCK) {
std::cerr << "Accept failed: " << strerror(errno) << std::endl;
}
// 检查所有客户端连接,非阻塞读取数据
for (int i = 0; i < max_clients; i++) {
int fd = client_fds[i];
if (fd > 0) {
char buffer[1024] = {0};
int bytes_read = recv(fd, buffer, sizeof(buffer), 0);
if (bytes_read > 0) {
std::cout << "Received from fd " << fd << ": " << buffer << std::endl;
send(fd, buffer, bytes_read, 0); // 回显数据
} else if (bytes_read == 0) {
// 连接关闭
close(fd);
client_fds[i] = 0;
} else if (errno != EAGAIN && errno != EWOULDBLOCK) {
// 出错
std::cerr << "Recv error: " << strerror(errno) << std::endl;
close(fd);
client_fds[i] = 0;
}
}
}
// 防止CPU空转,加入短暂休眠
usleep(1000); // 休眠1毫秒
}
close(server_fd);
return 0;
}3.2.3 特点与优缺点
特点:
- 进程在等待数据就绪阶段不会阻塞
- 进程需要不断轮询检查IO操作是否完成
- 数据复制阶段仍然是同步的(数据从内核复制到用户空间时会阻塞进程)
优点:
- 单线程可以处理多个IO请求
- 不会因为单个IO操作而阻塞整个进程
- 适合于需要同时处理多个连接但每个连接的IO量较小的场景
缺点:
- 需要不断轮询,消耗CPU资源
- 编程模型复杂,需要处理各种错误码
- 大量的系统调用会增加系统开销
3.2.4 应用场景
非阻塞IO模型适合:
- 需要同时处理多个连接的场景
- 每个连接的处理时间较短
- 对CPU资源不太敏感的应用
- 作为IO多路复用的基础
3.3 IO多路复用模型(I/O Multiplexing)
3.3.1 工作原理
IO多路复用允许单个进程同时监控多个文件描述符,避免了不断轮询带来的CPU浪费。Linux下主要有三种实现:select、poll和epoll。
工作流程:
- 用户进程通过select/poll/epoll系统调用监控多个文件描述符
- 内核监控这些文件描述符的状态变化
- 当有文件描述符就绪时,select/poll/epoll调用返回
- 用户进程处理就绪的文件描述符,发起实际的IO操作
3.3.2 select/poll/epoll对比
select:
- 通过bitmap来标记和存储文件描述符,监控的文件描述符有上限(通常为1024)
- 调用时需要将完整的文件描述符集合从用户空间复制到内核空间
- 每次调用需要遍历整个文件描述符集合来找出就绪的描述符
- 时间复杂度O(n),文件描述符增多时性能下降明显
poll:
- 使用链表结构存储文件描述符,不受最大数量限制
- 仍然需要复制整个文件描述符集合
- 同样需要遍历整个集合,时间复杂度O(n)
- 相比select,结构更清晰,没有描述符数量上限
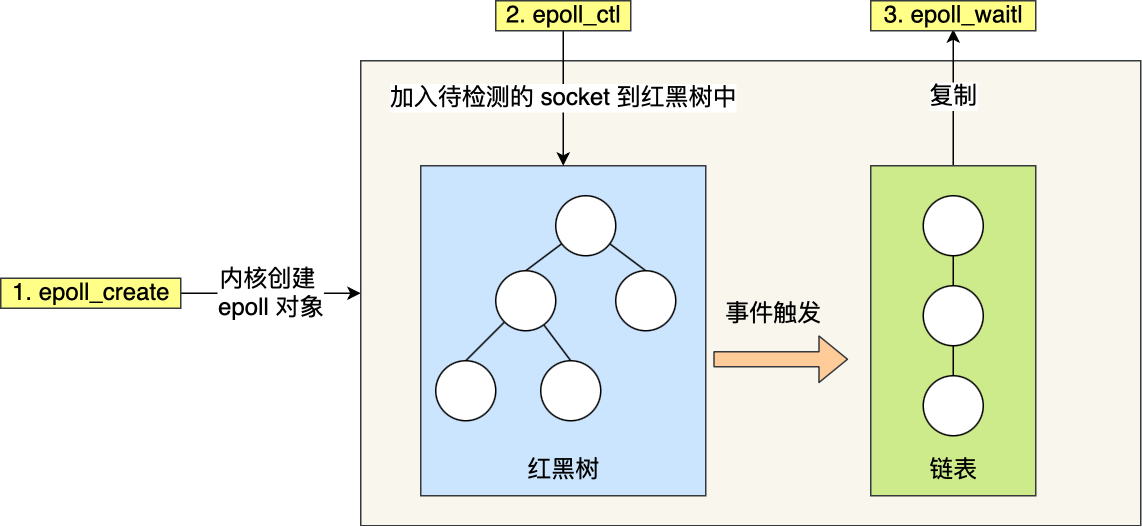
epoll:
- 使用红黑树存储文件描述符,通过事件通知机制避免遍历
- 内核维护了一个就绪队列,只返回就绪的文件描述符
- 只在添加、修改和删除文件描述符时需要系统调用,查询时无需重新传递
- 支持水平触发(Level Trigger)和边缘触发(Edge Trigger)两种模式
- 时间复杂度接近O(1),随着文件描述符数量增加,性能几乎不受影响
3.3.3 epoll服务器代码示例
#include <sys/types.h>
#include <sys/socket.h>
#include <sys/epoll.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <errno.h>
#include <iostream>
#define MAX_EVENTS 10
#define BUFFER_SIZE 1024
// 设置文件描述符为非阻塞
static int set_nonblocking(int fd) {
int flags = fcntl(fd, F_GETFL, 0);
if (flags == -1) {
perror("fcntl F_GETFL");
return -1;
}
if (fcntl(fd, F_SETFL, flags | O_NONBLOCK) == -1) {
perror("fcntl F_SETFL O_NONBLOCK");
return -1;
}
return 0;
}
int main() {
int server_fd, client_fd;
struct sockaddr_in server_addr, client_addr;
socklen_t client_len = sizeof(client_addr);
// 创建socket
server_fd = socket(AF_INET, SOCK_STREAM, 0);
if (server_fd == -1) {
perror("socket");
exit(EXIT_FAILURE);
}
// 设置socket选项,允许地址重用
int opt = 1;
if (setsockopt(server_fd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt)) == -1) {
perror("setsockopt");
exit(EXIT_FAILURE);
}
// 设置服务器地址
memset(&server_addr, 0, sizeof(server_addr));
server_addr.sin_family = AF_INET;
server_addr.sin_addr.s_addr = INADDR_ANY;
server_addr.sin_port = htons(8080);
// 绑定socket
if (bind(server_fd, (struct sockaddr *)&server_addr, sizeof(server_addr)) == -1) {
perror("bind");
exit(EXIT_FAILURE);
}
// 设置监听
if (listen(server_fd, 5) == -1) {
perror("listen");
exit(EXIT_FAILURE);
}
std::cout << "Server listening on port 8080..." << std::endl;
// 设置服务器socket为非阻塞
set_nonblocking(server_fd);
// 创建epoll实例
int epoll_fd = epoll_create1(0);
if (epoll_fd == -1) {
perror("epoll_create1");
exit(EXIT_FAILURE);
}
// 添加服务器socket到epoll
struct epoll_event ev, events[MAX_EVENTS];
ev.events = EPOLLIN; // 监听读事件
ev.data.fd = server_fd;
if (epoll_ctl(epoll_fd, EPOLL_CTL_ADD, server_fd, &ev) == -1) {
perror("epoll_ctl: server_fd");
exit(EXIT_FAILURE);
}
// 事件循环
while (1) {
int nfds = epoll_wait(epoll_fd, events, MAX_EVENTS, -1);
if (nfds == -1) {
perror("epoll_wait");
exit(EXIT_FAILURE);
}
// 处理所有就绪的文件描述符
for (int i = 0; i < nfds; i++) {
// 如果是服务器socket,则接受新连接
if (events[i].data.fd == server_fd) {
client_fd = accept(server_fd, (struct sockaddr *)&client_addr, &client_len);
if (client_fd == -1) {
perror("accept");
continue;
}
// 设置客户端socket为非阻塞
set_nonblocking(client_fd);
// 添加客户端socket到epoll
ev.events = EPOLLIN | EPOLLET; // 使用边缘触发模式
ev.data.fd = client_fd;
if (epoll_ctl(epoll_fd, EPOLL_CTL_ADD, client_fd, &ev) == -1) {
perror("epoll_ctl: client_fd");
close(client_fd);
continue;
}
std::cout << "New connection from " << inet_ntoa(client_addr.sin_addr)
<< ":" << ntohs(client_addr.sin_port) << ", fd=" << client_fd << std::endl;
} else {
// 客户端socket有数据可读
int fd = events[i].data.fd;
char buffer[BUFFER_SIZE];
// 读取数据
int n = read(fd, buffer, BUFFER_SIZE);
if (n <= 0) {
if (n < 0 && errno != EAGAIN) {
perror("read");
}
// 读取错误或连接关闭,从epoll移除并关闭socket
epoll_ctl(epoll_fd, EPOLL_CTL_DEL, fd, NULL);
close(fd);
std::cout << "Connection closed, fd=" << fd << std::endl;
} else {
// 成功读取数据
buffer[n] = '\0'; // 确保字符串以null结尾
std::cout << "Received from fd=" << fd << ": " << buffer << std::endl;
// 回显数据
if (write(fd, buffer, n) < 0) {
perror("write");
}
}
}
}
}
// 清理资源
close(server_fd);
close(epoll_fd);
return 0;
}3.3.4 特点与优缺点
特点:
- 单线程或进程可以同时处理多个IO请求
- 通过系统调用监控多个文件描述符的状态变化
- 只有在事件发生时才进行处理,避免了不必要的轮询
- 数据复制阶段仍然是阻塞的
优点:
- 比非阻塞IO更高效,避免了大量无用的轮询
- 能够处理大量并发连接
- 特别是epoll在高并发场景下性能优越
- 降低了系统资源消耗和系统调用开销
缺点:
- 编程复杂度高于阻塞IO
- 仍然需要自行管理事件循环和状态转换
- 不同平台的实现机制有差异(如Windows与Unix/Linux)
3.3.5 应用场景
IO多路复用模型适合:
- 高并发服务器(如Web服务器、代理服务器、数据库连接池等)
- 需要同时处理多种事件的应用(如聊天服务器同时处理用户消息和系统消息)
- 大量长连接但活跃度不高的场景(如保持连接的WebSocket服务)
- 现代网络框架的基础实现(如Nginx、Redis、Node.js等)
3.4 信号驱动IO模型(Signal-Driven I/O)
3.4.1 工作原理
信号驱动IO使用信号机制,当数据就绪时,内核通过信号通知进程,避免了轮询和阻塞等待。
工作流程:
- 进程通过sigaction系统调用注册SIGIO信号处理函数
- 进程调用fcntl设置socket的所有者和信号驱动标志
- 进程继续执行其他任务,无需等待或轮询
- 当数据就绪时,内核发送SIGIO信号给进程
- 信号处理函数被调用,进程执行实际的IO操作

3.4.2 代码示例(C语言)
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <signal.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#define SERVER_PORT 8080
#define BUFFER_SIZE 1024
int socket_fd; // 全局变量,用于在信号处理函数中访问
// SIGIO信号处理函数
void sigio_handler(int signo) {
char buffer[BUFFER_SIZE];
struct sockaddr_in client_addr;
socklen_t client_len = sizeof(client_addr);
// 读取数据(非阻塞模式,立即返回)
ssize_t n = recvfrom(socket_fd, buffer, BUFFER_SIZE, 0,
(struct sockaddr *)&client_addr, &client_len);
if (n > 0) {
buffer[n] = '\0';
printf("Signal handler: received %ld bytes: %s\n", n, buffer);
// 回显数据
sendto(socket_fd, buffer, n, 0, (struct sockaddr *)&client_addr, client_len);
}
}
int main() {
struct sockaddr_in server_addr;
struct sigaction sa;
// 创建UDP socket (信号驱动IO主要用于UDP)
socket_fd = socket(AF_INET, SOCK_DGRAM, 0);
if (socket_fd < 0) {
perror("socket");
exit(EXIT_FAILURE);
}
// 设置服务器地址
memset(&server_addr, 0, sizeof(server_addr));
server_addr.sin_family = AF_INET;
server_addr.sin_addr.s_addr = htonl(INADDR_ANY);
server_addr.sin_port = htons(SERVER_PORT);
// 绑定socket到地址和端口
if (bind(socket_fd, (struct sockaddr *)&server_addr, sizeof(server_addr)) < 0) {
perror("bind");
close(socket_fd);
exit(EXIT_FAILURE);
}
printf("UDP server listening on port %d...\n", SERVER_PORT);
// 第一步:注册SIGIO信号处理函数
memset(&sa, 0, sizeof(sa));
sa.sa_handler = sigio_handler;
sa.sa_flags = 0; // 不使用SA_RESTART标志,因为我们要处理中断
sigemptyset(&sa.sa_mask);
if (sigaction(SIGIO, &sa, NULL) < 0) {
perror("sigaction");
close(socket_fd);
exit(EXIT_FAILURE);
}
// 第二步:设置socket的所有者为当前进程
if (fcntl(socket_fd, F_SETOWN, getpid()) < 0) {
perror("fcntl F_SETOWN");
close(socket_fd);
exit(EXIT_FAILURE);
}
// 第三步:设置socket为非阻塞和异步模式
int flags = fcntl(socket_fd, F_GETFL, 0);
if (fcntl(socket_fd, F_SETFL, flags | O_NONBLOCK | O_ASYNC) < 0) {
perror("fcntl F_SETFL");
close(socket_fd);
exit(EXIT_FAILURE);
}
printf("Signal-driven I/O set up successfully. Waiting for signals...\n");
// 主循环 - 进程可以做其他事情,当数据到达时会由信号处理函数处理
while (1) {
printf("Main process is doing other work...\n");
sleep(5); // 模拟其他工作
}
// 不会执行到这里,但为完整性添加
close(socket_fd);
return 0;
}3.4.3 特点与优缺点
特点:
- 进程注册信号处理函数,当IO事件发生时接收通知
- 进程在等待数据就绪阶段可以执行其他任务
- 数据复制阶段仍需要进程参与(同步)
优点:
- 避免了轮询和阻塞等待,减少CPU消耗
- 进程可以在等待IO期间执行其他任务
- 对于偶发性IO事件处理效率较高
缺点:
- 信号机制开销较大
- 仅支持简单的通知,不提供事件详细信息
- 信号队列可能会溢出,导致信号丢失
- 主要用于UDP,对TCP支持有限
- 编程复杂,容易引入难以调试的问题
3.4.4 应用场景
信号驱动IO模型适合:
- UDP网络服务,特别是数据量小、频率低的场景
- 需要在等待IO期间执行其他任务的应用
- 对实时性要求不高的系统
- 嵌入式系统中的简单IO通知机制
3.5 异步IO模型(Asynchronous I/O)
3.5.1 工作原理
异步IO(AIO)是真正的非阻塞IO,它在两个阶段(等待数据就绪和数据复制)都不需要用户进程参与,由内核完成所有操作并在操作完成后通知用户进程。
工作流程:
- 用户进程调用aio_read等异步IO函数,并注册回调函数或完成通知
- 内核立即返回,用户进程继续执行其他任务
- 内核等待数据就绪,然后将数据从内核空间复制到用户空间
- 当所有操作完成后,内核通过信号或回调函数通知用户进程
3.5.2 代码示例(C语言)
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <aio.h>
#include <fcntl.h>
#include <errno.h>
#include <signal.h>
#include <sys/types.h>
#include <sys/stat.h>
#define BUFFER_SIZE 4096
// 全局变量,用于在信号处理函数中访问
struct aiocb my_aiocb;
volatile sig_atomic_t io_completed = 0;
// SIGIO信号处理函数
void aio_completion_handler(int signo, siginfo_t *info, void *context) {
// 确认是我们的异步IO完成
if (info->si_signo == SIGIO && info->si_code == SI_ASYNCIO) {
io_completed = 1;
printf("Asynchronous I/O completed!\n");
}
}
int main(int argc, char *argv[]) {
int fd;
struct sigaction sa;
char *buffer;
// 检查命令行参数
if (argc < 2) {
fprintf(stderr, "Usage: %s <file_path>\n", argv[0]);
exit(EXIT_FAILURE);
}
// 打开文件
fd = open(argv[1], O_RDONLY);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 分配缓冲区
buffer = malloc(BUFFER_SIZE);
if (!buffer) {
perror("malloc");
close(fd);
exit(EXIT_FAILURE);
}
// 设置信号处理函数
memset(&sa, 0, sizeof(sa));
sa.sa_sigaction = aio_completion_handler;
sa.sa_flags = SA_SIGINFO; // 使用sa_sigaction而不是sa_handler
sigemptyset(&sa.sa_mask);
if (sigaction(SIGIO, &sa, NULL) == -1) {
perror("sigaction");
free(buffer);
close(fd);
exit(EXIT_FAILURE);
}
// 设置AIO控制块
memset(&my_aiocb, 0, sizeof(my_aiocb));
my_aiocb.aio_fildes = fd;
my_aiocb.aio_buf = buffer;
my_aiocb.aio_nbytes = BUFFER_SIZE;
my_aiocb.aio_offset = 0;
// 设置通知方式为信号通知
my_aiocb.aio_sigevent.sigev_notify = SIGEV_SIGNAL;
my_aiocb.aio_sigevent.sigev_signo = SIGIO;
my_aiocb.aio_sigevent.sigev_value.sival_ptr = &my_aiocb;
// 提交异步读请求
printf("Submitting asynchronous read request...\n");
if (aio_read(&my_aiocb) == -1) {
perror("aio_read");
free(buffer);
close(fd);
exit(EXIT_FAILURE);
}
// 主进程可以继续执行其他任务
printf("Main process continues to run...\n");
// 模拟其他计算任务
for (int i = 0; i < 5; i++) {
printf("Main process is doing computation %d...\n", i);
sleep(1);
}
// 等待异步IO完成
while (!io_completed) {
printf("Waiting for I/O completion...\n");
sleep(1);
}
// 检查异步IO操作状态
int ret = aio_error(&my_aiocb);
if (ret == 0) {
// 获取读取的字节数
ssize_t bytes_read = aio_return(&my_aiocb);
printf("Read completed successfully: %ld bytes\n", bytes_read);
// 确保字符串结尾有null字符(如果读取的是文本)
if (bytes_read > 0) {
buffer[bytes_read < BUFFER_SIZE ? bytes_read : BUFFER_SIZE - 1] = '\0';
printf("First 100 characters read:\n%.*s\n", 100, (char *)my_aiocb.aio_buf);
}
} else {
fprintf(stderr, "Error completing I/O: %s\n", strerror(ret));
}
// 清理资源
free(buffer);
close(fd);
return 0;
}3.5.3 特点与优缺点
特点:
- 两个阶段(等待数据就绪和数据复制)都由内核完成
- 用户进程发起IO操作后立即返回,不需要等待或轮询
- 操作完成后通过回调或信号通知用户进程
优点:
- 真正的非阻塞IO,CPU利用率高
- 用户进程与IO操作完全解耦,可以充分利用CPU资源
- 适合于高性能、高吞吐量的应用
- 可以避免为IO处理创建大量线程
缺点:
- 在Linux平台支持有限,实现不完善
- 编程模型复杂,错误处理困难
- 依赖操作系统提供的异步IO支持
- 调试和追踪IO操作更加困难
3.5.4 应用场景
异步IO模型适合:
- 大规模数据处理系统
- 高性能网络服务器和中间件
- 对延迟极为敏感的应用
- 需要最大化CPU利用率的系统
- 多核环境下的大数据处理
4. 事件驱动编程模型:Reactor与Proactor
在高性能网络编程中,事件驱动模型是实现高并发处理的重要方式。基于不同的IO模型,形成了两种主要的事件驱动架构:Reactor模式和Proactor模式。
4.1 Reactor模式
4.1.1 Reactor模式原理
Reactor模式基于IO多路复用模型,采用同步非阻塞IO,通过事件分发和回调机制处理IO事件。
核心组件:
- Reactor(反应器):监听和分发事件
- Acceptor:处理新连接事件
- Handler(处理器):处理非阻塞IO事件
工作流程:
- 应用程序启动,创建Reactor,注册事件处理器
- Reactor调用多路复用API(如select/poll/epoll)监听事件
- 当事件发生时,Reactor将事件分发给对应的处理器
- 处理器执行非阻塞读/写等IO操作,完成业务逻辑
4.1.2 Reactor模式的线程模型
Reactor模式有三种常见的线程模型实现:
-
单Reactor单线程模型:
- 所有事件处理在同一个线程中完成
- 优点:简单,没有并发问题
- 缺点:无法利用多核优势,处理器密集型任务会阻塞事件处理
-
单Reactor多线程模型:
- Reactor在主线程中处理连接事件
- IO事件处理交给线程池执行
- 优点:可以利用多核CPU,响应更快
- 缺点:增加了线程切换开销,可能存在线程同步问题
-
多Reactor多线程模型:
- 主Reactor负责接收连接,然后分发给从Reactor
- 每个从Reactor有自己的事件循环,可在不同线程中运行
- 业务处理可以由线程池执行
- 优点:可扩展性好,负载均衡,充分利用多核
- 缺点:实现复杂,线程间协调成本高
4.1.3 Reactor模式的应用
Reactor模式被广泛应用于高性能网络框架和服务器中,例如:
- Nginx的事件驱动架构
- Node.js的事件循环
- Netty的IO模型
- Redis(6.0之前)的事件库
- libevent和libev等事件处理库
4.2 Proactor模式
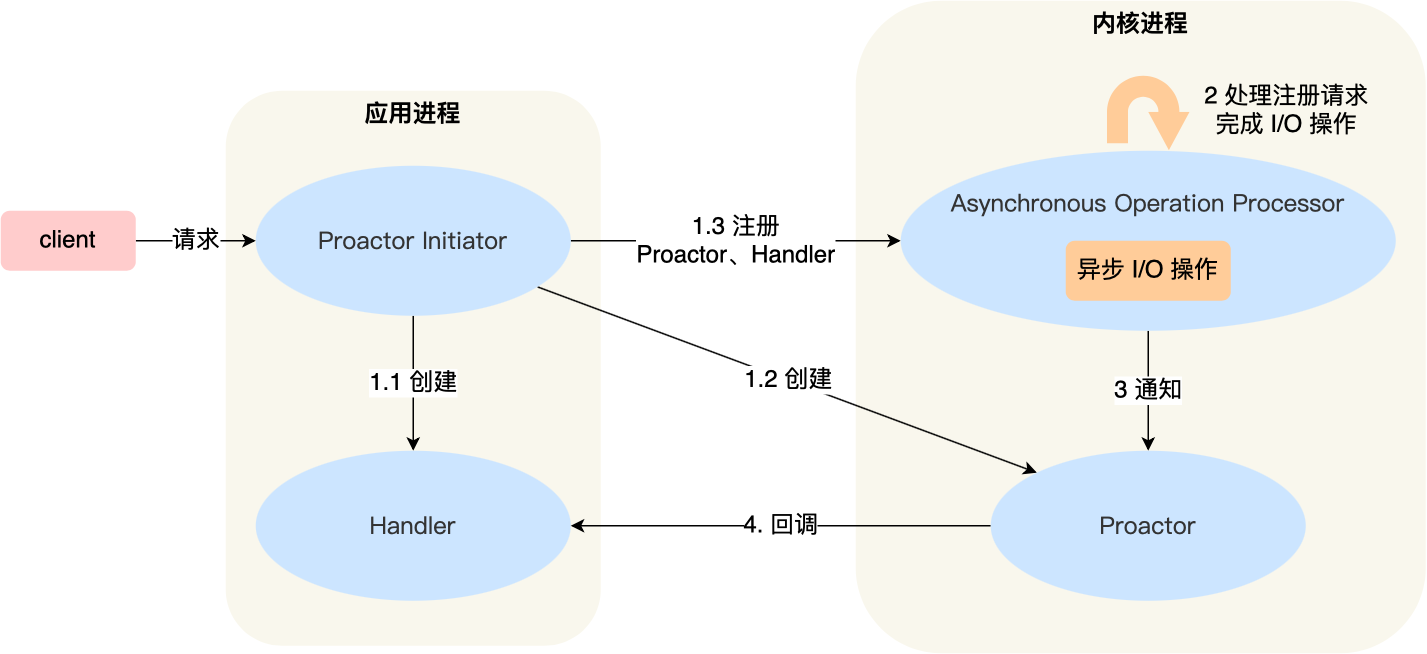
4.2.1 Proactor模式原理
Proactor模式基于异步IO模型,由操作系统完成IO操作,用户只需处理完成事件。
核心组件:
- Proactor(前摄器):管理完成事件并分发
- 异步IO操作:由操作系统执行的IO操作
- 完成处理器:处理已完成的IO操作
工作流程:
- 应用程序启动,初始化Proactor,注册完成处理器
- 应用程序调用异步IO接口,同时提供缓冲区和完成处理器
- 应用程序继续执行其他任务
- 操作系统完成IO操作后,通知Proactor
- Proactor调用相应的完成处理器
4.2.2 Reactor与Proactor的区别
| 特性 | Reactor模式 | Proactor模式 |
|---|---|---|
| 基础IO模型 | 同步IO(IO多路复用) | 异步IO |
| 数据处理时机 | 事件就绪时 | 操作完成后 |
| IO操作执行者 | 用户进程/线程 | 操作系统 |
| 事件类型 | 就绪事件(可读/可写) | 完成事件 |
| 实现复杂度 | 相对简单 | 较复杂 |
| 跨平台支持 | 良好 | 有限(尤其在Linux) |
| 适用场景 | 广泛,特别是需要跨平台 | 对性能要求极高且平台支持良好 |
4.2.3 Proactor模式的应用
Proactor模式在支持良好的平台上得到了应用,例如:
- Windows IOCP(Input/Output Completion Ports)
- .NET异步编程模型
- 一些高性能数据库系统
- Boost.Asio库(在Windows平台)
5. IO模型的选择与应用
5.1 选择IO模型的考虑因素
在选择合适的IO模型时,需要考虑以下因素:
-
连接数量:
- 少量连接:阻塞IO可能足够
- 大量连接:IO多路复用或异步IO更适合
-
连接活跃度:
- 高活跃连接:可能需要多线程或多进程模型
- 低活跃连接(如长连接):IO多路复用效果好
-
响应时间要求:
- 实时性要求高:异步IO或多线程模型
- 实时性要求低:可以使用更简单的模型
-
系统资源约束:
- CPU资源有限:避免过多线程,选择IO多路复用
- 内存资源有限:避免过多进程和线程创建
-
平台兼容性:
- 需要跨平台:选择各平台都支持的IO模型
- 特定平台:可以利用平台特有的高性能IO模型
-
应用程序复杂性:
- 简单应用:阻塞IO易于实现和调试
- 复杂应用:事件驱动模型可能更适合
5.2 常见应用场景的最佳实践
-
Web服务器:
- IO多路复用(如epoll)+ 工作线程池
- 多Reactor多线程模型
- 适用:Nginx、Apache、Tomcat等
-
数据库系统:
- 连接池 + 多路复用
- 对于关键IO路径可以使用异步IO
- 适用:MySQL、PostgreSQL、Redis等
-
消息队列和中间件:
- 事件驱动架构,IO多路复用或异步IO
- 多Reactor多线程模型处理高并发
- 适用:Kafka、RabbitMQ、ZeroMQ等
-
游戏服务器:
- IO多路复用处理大量连接
- 多线程或协程处理游戏逻辑
- 适用:大型多人在线游戏服务器
-
物联网应用:
- 轻量级IO模型,可能使用信号驱动IO
- 异步处理模型减少资源消耗
- 适用:设备网关、监控系统等
-
移动应用后端:
- 异步IO处理大量短连接
- 事件驱动模型提高响应速度
- 适用:移动应用API服务器
5.3 现代框架中的IO模型实现
-
Node.js:
- 基于事件驱动、非阻塞IO模型
- 使用libuv库实现跨平台IO多路复用
- 单线程事件循环 + 工作线程池
-
Netty(Java):
- 多Reactor多线程模型
- 基于Java NIO实现的非阻塞IO框架
- 支持高性能协议处理
-
Nginx:
- 多进程 + IO多路复用
- 主进程 + 多个工作进程架构
- 每个工作进程使用epoll处理连接
-
Redis:
- 单线程(6.0以前)+ IO多路复用
- 使用自实现的事件库处理连接和命令
- 在6.0版本引入了多线程IO处理
-
Go语言:
- 基于协程(Goroutines)的并发模型
- 结合多路复用实现高效IO
- 用户态调度减少线程切换开销
-
Python asyncio:
- 基于协程的异步IO库
- 事件循环处理IO多路复用
- 通过async/await简化异步编程
6. IO模型背后的思想与发展趋势
6.1 IO模型演进中的核心思想
IO模型的演进反映了几个关键的设计思想:
-
分离关注点:
- 将IO操作与业务逻辑分离
- 降低系统复杂度,提高可维护性
-
事件驱动:
- 以事件为中心组织程序流程
- 提高系统响应能力和资源利用率
-
异步思维:
- 从同步阻塞到异步非阻塞的转变
- 并行处理提高系统吞吐量
-
资源最小化:
- 减少线程和进程数量
- 降低上下文切换开销
-
批处理优化:
- 合并多个IO操作减少系统调用
- 提高数据处理效率
6.2 未来发展趋势
IO模型的未来发展趋势包括:
-
零拷贝技术的普及:
- 减少数据在内核空间和用户空间之间的复制
- 直接在内核中完成数据转发,提高性能
-
协程模型的广泛应用:
- 用户态调度减少线程切换开销
- 简化异步编程模型,提高开发效率
-
更高效的异步IO实现:
- 如Linux的io_uring,提供更完善的异步IO支持
- 降低系统调用开销,提高IO效率
-
硬件加速:
- 利用RDMA(Remote Direct Memory Access)技术
- 智能网卡卸载部分IO处理
-
混合IO模型:
- 针对不同场景使用不同IO模型
- 在同一系统中结合多种IO策略
-
编程模型简化:
- 更易用的异步编程接口
- 编译器和语言层面对异步IO的原生支持
6.3 IO模型的哲学思考
IO模型的演进不仅是技术的进步,也反映了计算机科学中的几个重要哲学思想:
-
时间与空间的权衡:
- 使用更多内存来换取更高的时间效率
- 批处理和缓存机制在IO模型中的应用
-
复杂性与简洁性的平衡:
- 更复杂的模型带来更高性能但增加了理解和维护成本
- 抽象层的设计如何降低复杂性
-
确定性与不确定性的处理:
- IO操作天然具有不确定性
- 不同IO模型如何处理这种不确定性
-
封装和抽象的价值:
- 高级IO框架如何封装底层细节
- 抽象的价值和成本
7. 总结
IO模型是现代计算机系统设计中不可或缺的重要组成部分。从最初的阻塞IO到异步IO,从单线程到多路复用,IO模型的演进反映了计算机科学在追求更高效率、更好并发处理能力的不懈努力。
每种IO模型都有其独特的优势、局限性和适用场景,不存在绝对的"最佳"模型。在实际应用中,需要根据具体场景、性能需求和资源约束选择合适的IO模型,甚至可能需要结合多种模型的优点。
深入理解IO模型不仅有助于构建高性能的系统,也能够启发我们在软件设计中更好地处理并发、异步和事件驱动等问题。随着硬件和操作系统的不断发展,IO模型也将继续演进,为未来的高性能计算提供更加强大的支持。