Problem with Create 3 Simulator - Galactic #345
-
|
Hello, I am facing an issue with Create3 simulator. There exist inconsistency between rviz and gazebo when using the APIs to drive the robot to a certain goal point. In order to generate the problem, the following commands are used:
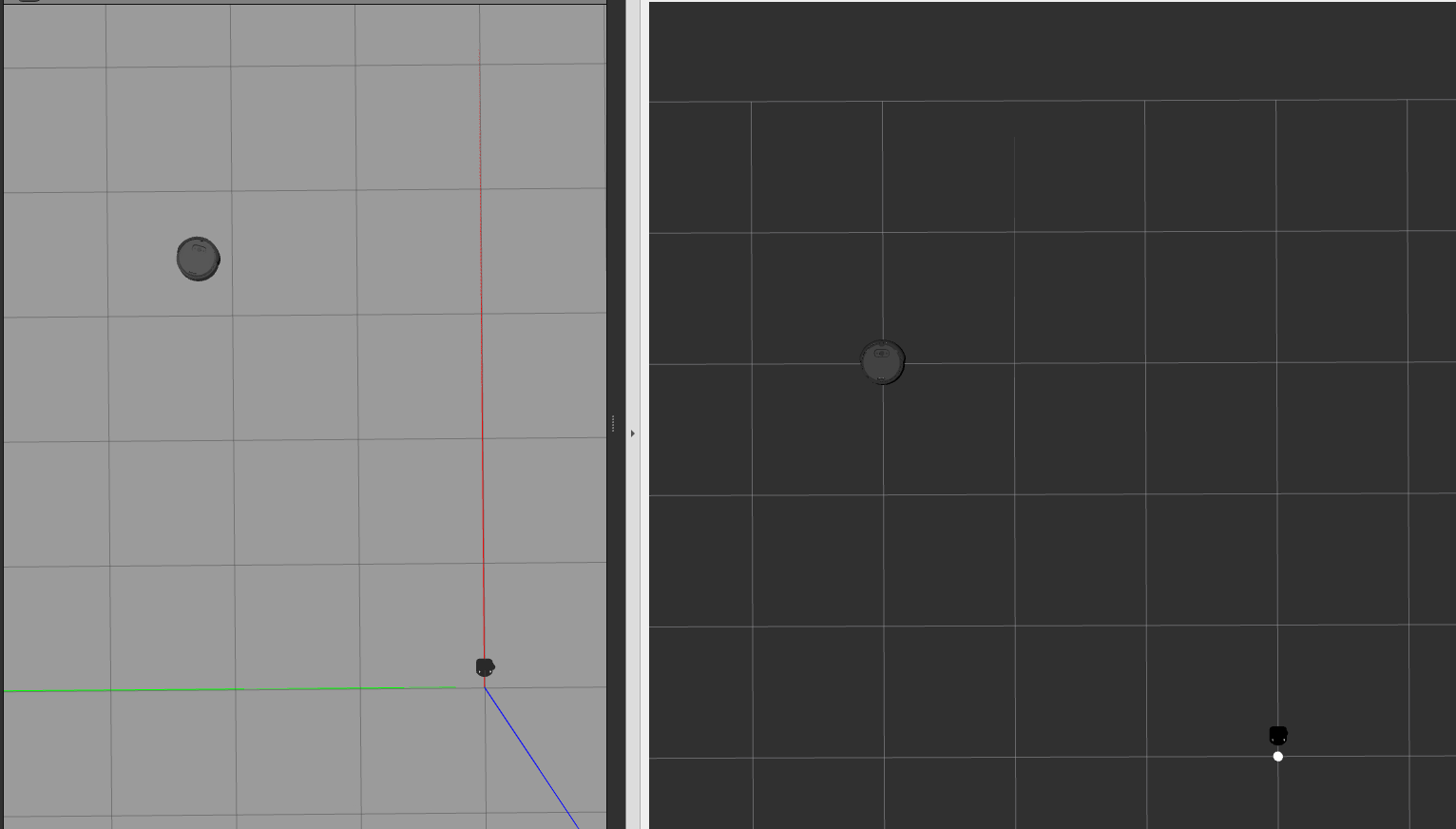
The robot's position in rviz is accurate and has no issue at all, however, this is not the case in gazebo as shown in the attached image (gazebo is on the left, and rviz is on the right). The drift between gazebo and rviz keeps on getting bigger if more driving commands are used. I know that gazebo represents the ground truth, while rviz uses the data published on the topics. Also something like this can happen due to the slippage of the wheels. However, according to Create3 documentation, the pose is estimated based on dead reckoning estimation, hence, I believe this should not happen (at least for this simple task). I really could not find an explanation for this. Am I misunderstanding something? I am using ROS2 Galactic and Ubuntu 20.04 Thank you in advance.
|
Beta Was this translation helpful? Give feedback.
Replies: 1 comment 3 replies
-
|
The odometry coming from the sim is produced by: I believe these libraries will have noise in the odometry estimate. This noise is actually probably worse than the real robot There is separately a ground truth topic in the sim I got all these code snippets from |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for your reply. I think everything is now clear. I just have 2 questions so far.
Regards, |
Beta Was this translation helpful? Give feedback.
-
|
Beta Was this translation helpful? Give feedback.
-
|
Thank you so much |
Beta Was this translation helpful? Give feedback.
The odometry coming from the sim is produced by: