Replies: 1 comment 6 replies
-
|
Hi there, I'm a little confused. It looks like that RMW profile you're using is one you would want on a laptop; on your Pi, if you're connected both to the robot with usb0 and to your local network with wlan0, you'll want to use the multiple network interfaces XML config on the Pi, which is Using this, you should be able to see the robot with a ros2 topic list. The robot's RMW can be forced to Cyclone by connecting to it with a browser to {robot ip}/ros-config, or if you know you're connected over usb0 with the Pi (can you ping 192.168.186.2?), you can just You will need to restart both the robot and also ROS 2 on your Pi ( |
Beta Was this translation helpful? Give feedback.
-
|
Have you updated your robot to G.2.2 as in the directions at https://edu.irobot.com/create3-setup ? Also -- did you mean that you restarted your Pi with Details on changing the RMW from the robot's web server are here. |
Beta Was this translation helpful? Give feedback.
-
|
Aha! I think you may have found the answer to my problem, I didn't realize it needed to be updated. I'm current working on this remotely and so can only interface with the pi but will attempt this fix on Monday and update this discussion with the results. Thanks for the help thus far! |
Beta Was this translation helpful? Give feedback.
-
|
You're welcome! Have a great weekend. |
Beta Was this translation helpful? Give feedback.
-
|
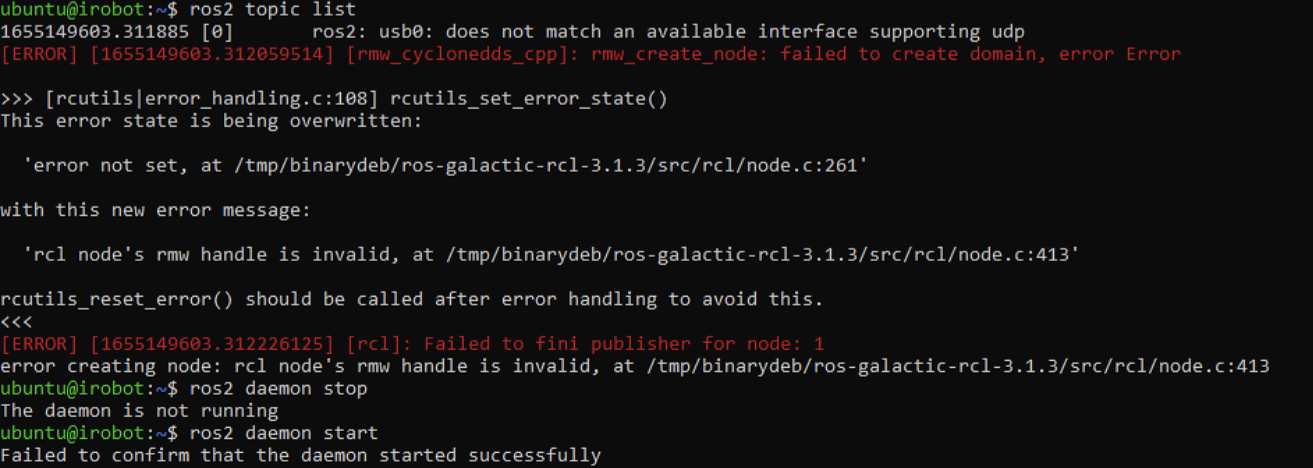
Hello again, Shamlian. I was able to go through the process of upgrading the firmware and checking the Application page of the robot to confirm it was configured for CycloneDDS RMW. However when I went to restart the robot and ROS2 server on the pi, I had issues restarting ROS2 and checking the topic list:
|
Beta Was this translation helpful? Give feedback.
-
|
Good morning. It looks like there's a problem with your ROS 2 install and not with the robot. A couple questions:
|
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Hello!
I'm very excited to begin using the Create3 for some interesting SLAM projects. I've spent the better part of two days trying to get the basic ros2 setup running on a RPi 4 that I have connected via usb to my Create 3.
I follow the instructions on your website: https://iroboteducation.github.io/create3_docs/setup/pi4/
However, after completing them and checking for the available topics, All I see is
Please help me figure out what's wrong with my installation.
System Info:
Ubuntu 20.04.4 LTS (GNU/Linux 5.4.0-1062-raspi aarch64)
RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
Note: I also tried the RWM Fast-DDS since I didn't understand in the instructions where to find my robot's "Application Configuration page"
Bottom of
~/.bashrc:RMW profile (located in ~/ros_install/):
This profile was found here under Multiple network Interfaces due to being on my company's WiFi
Beta Was this translation helpful? Give feedback.
All reactions