-
|
Can anyone provide links or examples of solving a minimum time problem using InfiniteOpt.jl? |
Beta Was this translation helpful? Give feedback.
Replies: 1 comment 6 replies
-
|
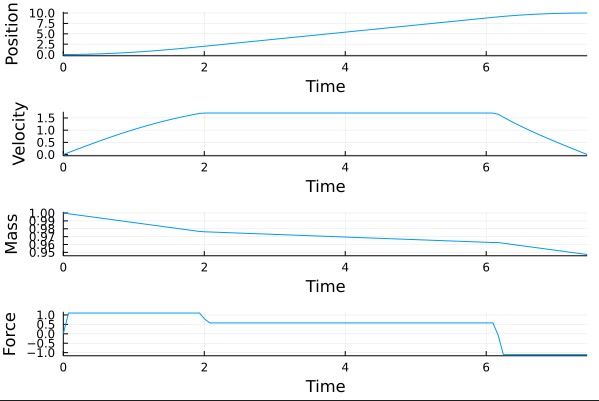
Hi there! Welcome to the InfiniteOpt discussion forum! Minimum time problems can be reformulated into a standard optimal control problem. A nice video tutorial is given here in the context of an optimal rocket launch problem where we want to minimize the final time for the rocket to arrive. The key reformulation trick is to scale the total time by the final time with The script below implements the same rocket example in InfiniteOpt: using InfiniteOpt, Ipopt, Plots
# Define the model
model = InfiniteModel(Ipopt.Optimizer)
# Setup up the normalized time parameter τ = t / tf
@infinite_parameter(model, τ in [0, 1], num_supports = 101)
# Create the variables
@variable(model, -1.1 <= u <= 1.1, Infinite(τ), start = 0)
@variable(model, s, Infinite(τ), start = 0)
@variable(model, 0 <= v <= 1.7, Infinite(τ), start = 0)
@variable(model, m >= 0.2, Infinite(τ), start = 1)
@variable(model, 0.1 <= tf <= 100, start = 1)
# Set the objective
@objective(model, Min, tf)
# Define the ODEs
@constraint(model, ∂(s, τ) == tf * v)
@constraint(model, m * ∂(v, τ) == tf * (u - 0.2 * v^2))
@constraint(model, ∂(m, τ) == tf * (-0.01 * u^2))
# Set the initial conditions
@constraint(model, s(0) == 0)
@constraint(model, v(0) == 0)
@constraint(model, m(0) == 1)
# Set terminal constraints
@constraint(model, s(1) == 10)
@constraint(model, v(1) == 0)
# Optimize and get the results
optimize!(model)
opt_u = value(u)
opt_s = value(s)
opt_m = value(m)
opt_v = value(v)
opt_tf = value(tf)
# Get the scaled times
ts = value(τ) * opt_tf
# Plot the optimal trajectories
plot(ts, [opt_s opt_v opt_m opt_u], layout = (4, 1), legend = false,
xlabel = "Time", ylabel = ["Position" "Velocity" "Mass" "Force"],
xlims = (0, opt_tf))
|
Beta Was this translation helpful? Give feedback.
-
|
Glad to be of help, please feel free to reach out again with any further questions or comments. |
Beta Was this translation helpful? Give feedback.
-
|
My understanding is that the discretized optimization problem is solved using orthogonal collocation method. This should result in a piece-wise constant solution for optimal u(t). But the plot of force looks like a continuous function. Is this just an artifact of the plot function interpolating values (at the places where it ramps up or down)? |
Beta Was this translation helpful? Give feedback.
-
|
We can solve it via finite difference methods or orthogonal collocation (the default used above is backward finite difference). In this case, u(t) effectively becomes a piece-wise linear function (the plot interpolates). However, in general, my understanding that the control function u(t) need not necessarily be a piece-wise function and can be a general continuous function as well (I can think of a number of examples where this is the case). This behavior is independent of our selected numerical method to approximate the state derivatives (e.g., orthogonal collocation). These numerical methods simply provide a discrete approximation of the underlying continuous-time optimal solution. |
Beta Was this translation helpful? Give feedback.
-
|
I should also note that these are all solved simultaneously as is explained in "Nonlinear Programming: Concepts, Algorithms, and Applications to Chemical Processes" |
Beta Was this translation helpful? Give feedback.
-
|
OK, thanks for the info. I will study the documentation in more detail. |
Beta Was this translation helpful? Give feedback.
Hi there! Welcome to the InfiniteOpt discussion forum!
Minimum time problems can be reformulated into a standard optimal control problem. A nice video tutorial is given here in the context of an optimal rocket launch problem where we want to minimize the final time for the rocket to arrive.
The key reformulation trick is to scale the total time by the final time with
τ = t / tfand lettfbe a finite variable.The script below implements the same rocket example in InfiniteOpt: