Replies: 20 comments 7 replies
-
|
Hi, your question wtr. the switch type is a common one, so let me give you an answare.
They will all work as they are capable of producing binary signals (low and high). The simplest is a reed, normally open is recommended as those generally have faster switching properties. So depending on how much you know about electric circuits I would start with reed as that is really plug and play (with the caveat to have proper settings)
This question comes up frequently. ORM works with any number of magnets (well almost as it needs at least one:)) General consensus on the recommendation is that you start with one and once it works you can add as many as you want. I ended up with 3. The reason for this cautious approach is that precise magnet alignment is important (while ORM v1beta can handle significant amount of noise). If magnets are not equal distance than it could poison the data readings (which ORM v1beta will be able to handle) but one may lose the advantage of more magnets (e.g. forecurves may be affected). For instance I was not able to drill with good equal distance in my flywheel so I ended up 3d printing a magnet mount as my printer is much more precise than me drilling into metal :)
Please have a look here: #113 I used the original https://dvernooy.github.io/projects/ergware/ approach becuase I was able to disassemble my rower and measure, weight the parts separately (yes the screws too :)) but the other swinging method could also work but I dont have experience on its accuracy. EDIT: On the hall sensor, there are additional thoughts below at last comments: #115 (reply in thread) |
Beta Was this translation helpful? Give feedback.
-
The approach @Abasz provides is a good one, but requires people to take their machine apart, which some of us are reluctant to do. An alternative is to go to a gym and find a Concept 2 rower. See how fast you are there, and tweak the dragFactor on your own machine (with the autoAdjustDragFactor to FALSE) until you get the same speed at the same effort (monitoring your HR here might help). After that, you can adjust the flywheelInertia to make the automatically calculated dragfactor line up with the fixed setting. This is how I calibrated my NordicTrack as well. |
Beta Was this translation helpful? Give feedback.
-
|
I think i will try a hall effect sensor with a logic 3v3 / 5v converter. I'll use 3d printed parts to fix the sensor and the magnets. Concerning the flywheelInertia, the rower i use is a commercial one with a magnetic dampner. Thank you for your answers ! |
Beta Was this translation helpful? Give feedback.
-
I think you might be able to get away without logic shifting. Most Hall sensors are open collector sinking which should mean that their signal will be to what ever you pull them up to (basically decoupling the signal from the vcc). If this is the case you may be able to supply 5v to vcc and connect the signal to gnd and the 3.3v pin of the Rpi (which has internal pull up): https://electronics.stackexchange.com/questions/599548/5v-device-open-collector-with-3-3v-controller Note! The above is only valid assuming that the hall you choose is an open collector sinking, I recommend testing it with a multi meter properly to confirm that it is working even after consulting the datasheet. |
Beta Was this translation helpful? Give feedback.
-
|
May I kindly suggest to start with V1Beta when installing Open Rowing Monitor (see this HowTo: #118), which also has a manual for discovering all your settings (see https://github.com/laberning/openrowingmonitor/blob/v1beta/docs/rower_settings.md)? V1Beta has some features which make it more robust, and it will save you from switching later on. |
Beta Was this translation helpful? Give feedback.
-
|
Ok, thank you both, for the direction on how to switch on branch v1beta and for the info on the sensors. I've installed openrowermonitor on my rpi zero 2, it's seems to run ok. I ordered some reed NO switches and some A3144 hall effect sensors, i think i will be able to test them next week-end. Thanks |
Beta Was this translation helpful? Give feedback.
-
|
No problem, we will help you get there. With the manual you should be able to tackle most issues, but it isn't perfect yet so we'll expect some issues. |
Beta Was this translation helpful? Give feedback.
-
|
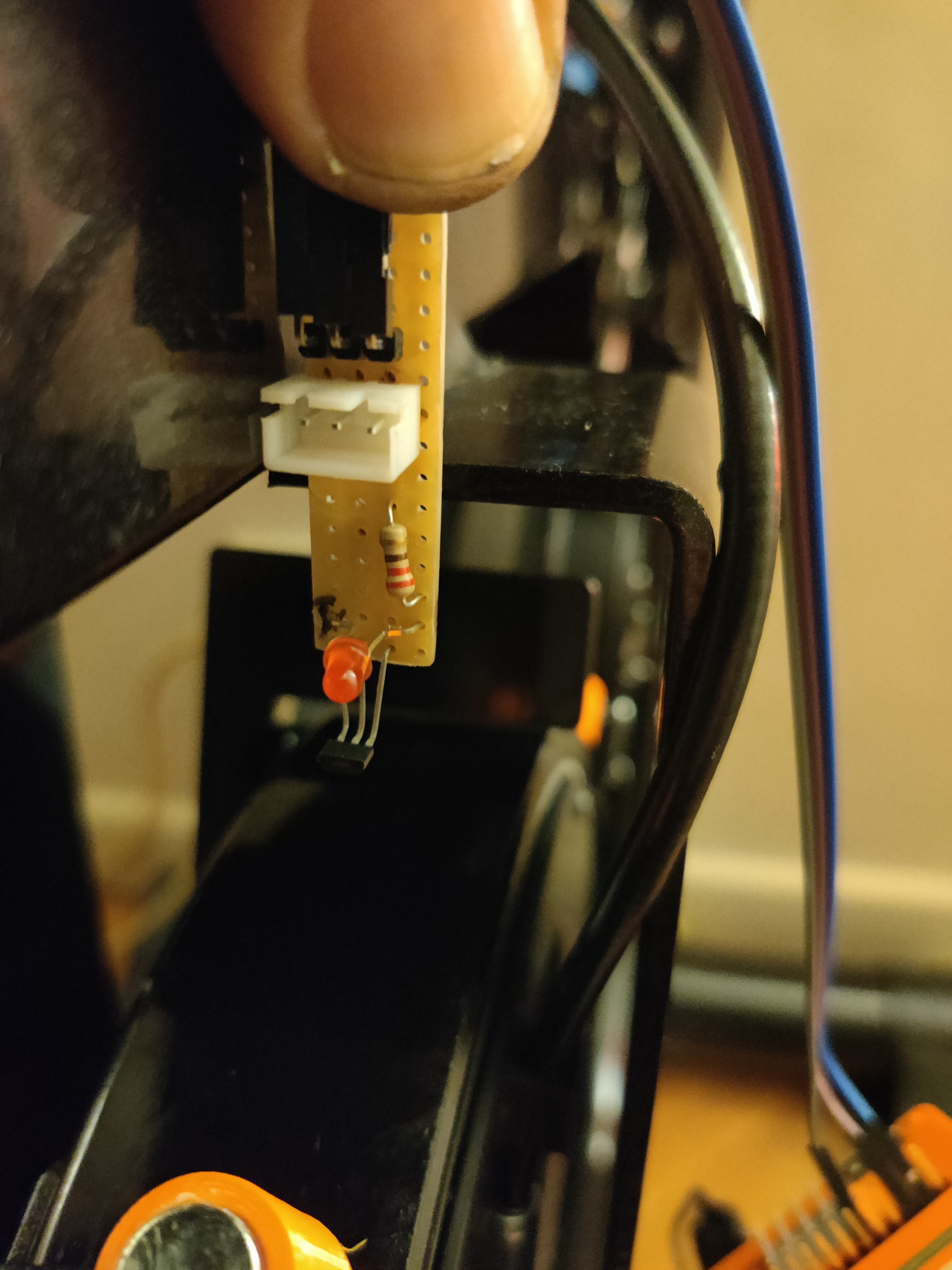
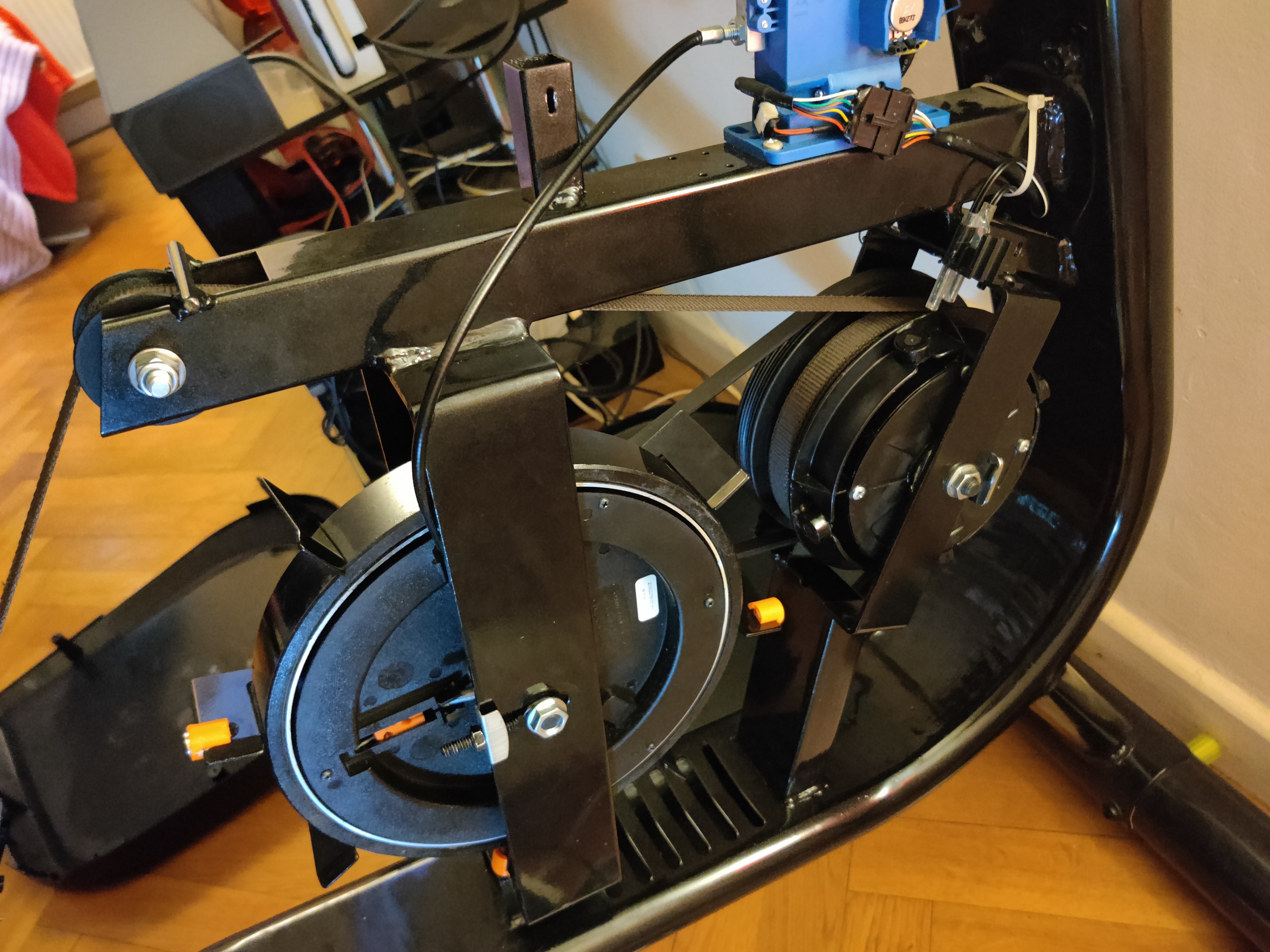
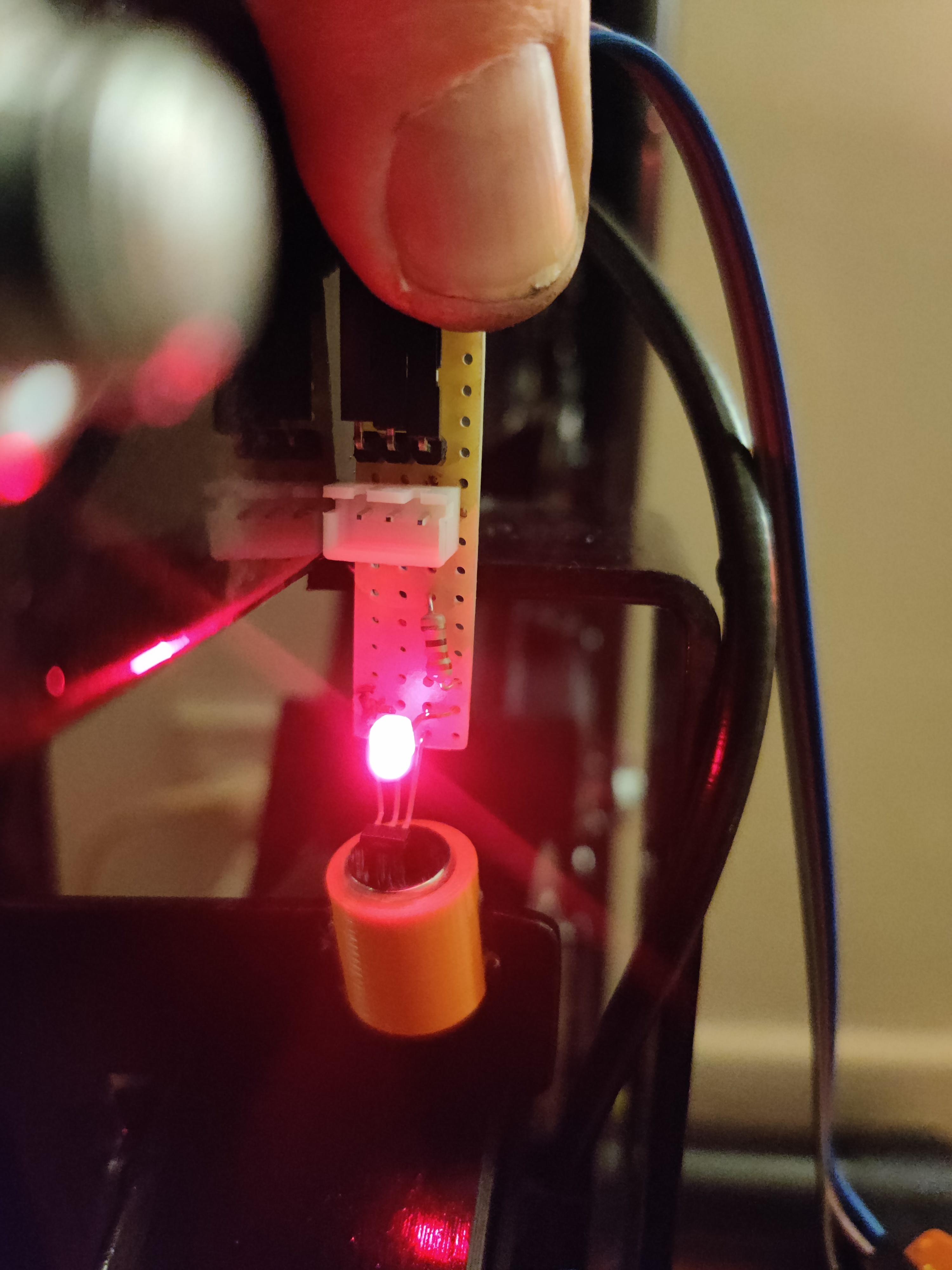
Hello, here are some news. I finaly got my A3144 sensor. I added a led+resistor and tested it with my magnets. When the magnet (with the right orientation) is detected, the led lights on, and the signal is low. I've added 4 magnets. The flywheel weight is 4.57kg / diameter 23cm. Found some data on the flywheel : http://www.chihua.com.tw/zh-tw/product/?_sp=detail&recordId=23 but mine is not made with aluminum but with steel. Do you think, i can use the disc formula to calculate an aproximation of the moment of inertia ? Here are some pictures : |
Beta Was this translation helpful? Give feedback.
-
|
Still need to print some 3d parts to attach the sensor. |
Beta Was this translation helpful? Give feedback.
-
|
My advice:
As Jaap pointed out in another discussion: Garbage in, garbage out. If the data coming from the sensor is not good/noisy your results will be noisy. If the data is good getting proper results is a lot easier. |
Beta Was this translation helpful? Give feedback.
-
|
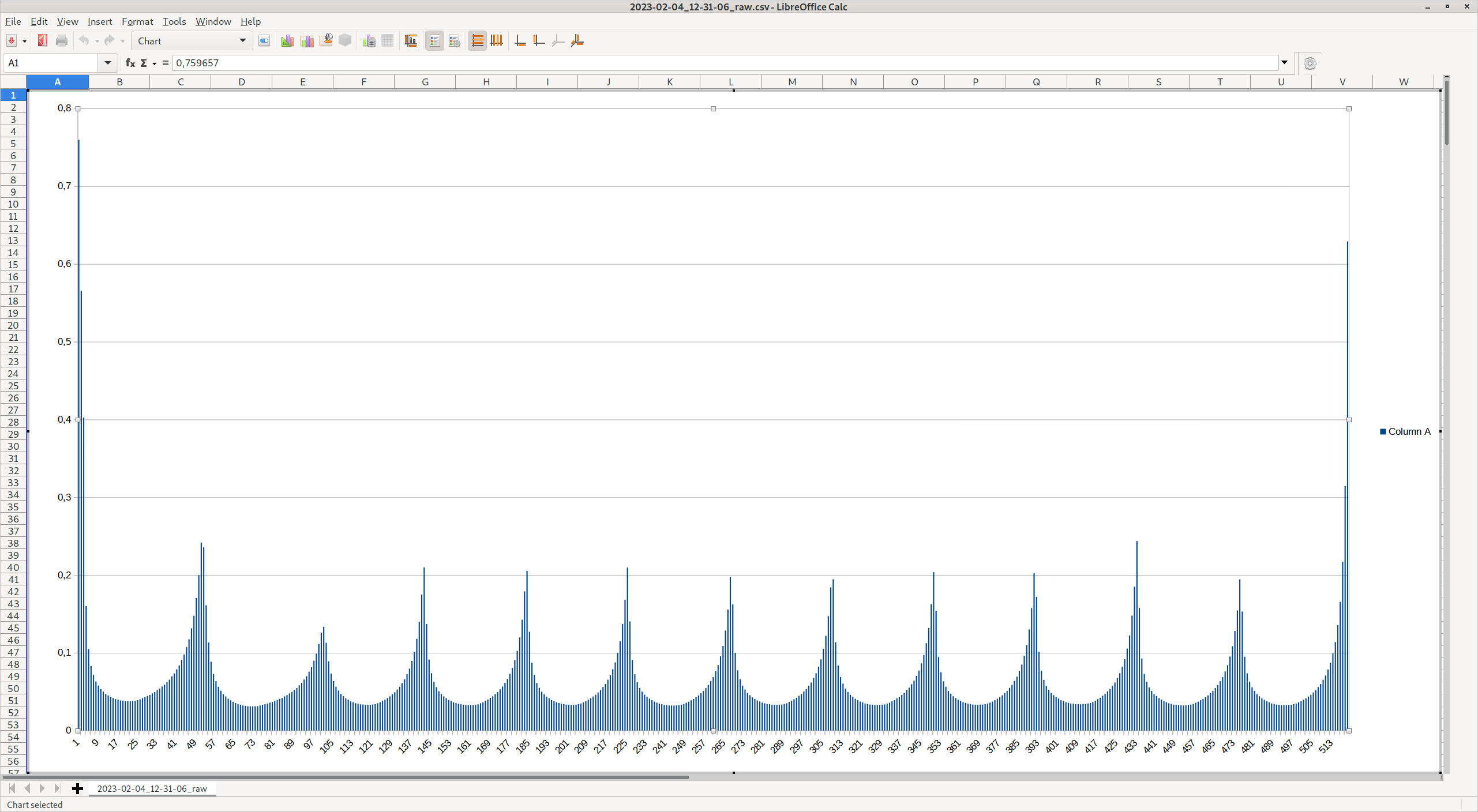
Ok, I fixed the sensor, 2 magnets. Data seems good to me (no noise, no bounces), what do you think ? |

Beta Was this translation helpful? Give feedback.
-
That is some gorgeous looking data! |
Beta Was this translation helpful? Give feedback.
-
|
Data looks great,no noise. It is quite evenly distributed between drive (values are dropping rapidly) and recovery (values are rising) which is a bit different from my water-based rower (where each curve is more slanted to the right) but that might be due to your magnetic brake system. Now you can fiddle with inertia, drag factor etc :) |
Beta Was this translation helpful? Give feedback.
-
Yeah, that is bit different than Air/Water rowers: in magnetic rowers, the drag force is constant regardless of flywheel speed. In Air/Water systems, the dragforce is a function of the flywheel speed, increasing with speed. So for stroke detection you probably won't reach a 0.95 stroke quality because of this (no big practical issue) and the same goes for the dynamic drag calculation (also no big practical issue). But I'm curious how far it can be taken, especially with such great looking data. |
Beta Was this translation helpful? Give feedback.
-
|
Ok, i'm going to extend the sensor cable to be able to move the raspberry out of the rower, then re-assemble the whole thing to record a true training session. thank you. |
Beta Was this translation helpful? Give feedback.
-
|
More data, with the rower re-assembled, so far so good. 2023-02-04_16-52-43_raw.csv.gz vs Rower computer : 343m / 40 stroke / 21 kcal I need to tune the rower settings to try to have same data for distance. |
Beta Was this translation helpful? Give feedback.
-
|
Please note that your rowers computer might be spitting out nonsense data as well. Actually quite few monitors present realistic data, hence our development of ORM :). So if possible, compare to a Concept2, which are considered quite reliable. If you have nothing to compare with, I would assume a distance per stroke of about 10 meters per stroke. To change the distance for a set of strokes, you need to modify the dragfactor, and if it is set to dynamic drag calculation, also the flywheelinertia. |
Beta Was this translation helpful? Give feedback.
-
Beta Was this translation helpful? Give feedback.
-
|
Data looks good. Inertia is probably too high hence metrics overshoot. But it's pretty easy to test as you can actually do replay the previously recorded raw csv and tweak it in. If your aim is to have the same data in terms of distance as your current monitor then just set the inertia to a value that gives that same result then you don't need to measure the inertia. |
Beta Was this translation helpful? Give feedback.
-
|
Ok, i will try that tomorrow with a 35 minutes rowing session. |
Beta Was this translation helpful? Give feedback.
-
|
Hello : 35 minutes session : still massive metrics overshoot. i will try the replay to adjust inertia |
Beta Was this translation helpful? Give feedback.
-
|
got those messages since i modified as suggested : flanklength of "3" and minimumTimeBetweenImpulses of "0.01" |
Beta Was this translation helpful? Give feedback.
-
|
minimumTimeBetweenImpulses isn't doing much, aside some sanity checks that will produce some logging,but not this one. Perhaps increasing the flanklength to 4 might help a bit. |
Beta Was this translation helpful? Give feedback.
-
|
To mimic rower computer distance (7050m), after replaying the file, this is what i found :
But power and cal seems a bit low (polar flow says 438kcal, and my watch says 526kcal) |
Beta Was this translation helpful? Give feedback.
-
|
I don't know about your technique, but 7.25 meters per stroke is quite inefficient. A distance per stroke of 9 to 10 meters is more normal. |
Beta Was this translation helpful? Give feedback.
-
|
The technique is not the same on these home rower, you have less amplitude on recovey than with a C2 (see this video https://www.youtube.com/watch?v=4FwlvCy4_54 at 1:00min for comparaison). I think the distance displayed by the rower computer is not accurate. I think i have to try C2 in a gym and check the distance i row with 900 strokes. The hardest part will be the setup to feel the same drag factor. |
Beta Was this translation helpful? Give feedback.
-
|
Does it change anything if there is a belt between the sproket and the flywheel concerning the sproketRadius parameter ? The radius of the belt is 8cm on sproket side and 3.8cm on the flywheel. |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Hello,
My rower has 2 reed switches on the drive wheel.
I'm about to add another sensor on the flywheel to use openrowingmonitor.
I've searched and read most of the discussion about sensor but did not find a definitive answer.
I was wondering what type of sensors are the more accurate regarding their electronical and mecanical properties ?
How many magnets should i had on the flywheel ?
How can i determine the parameter flywheelInertia when dragFactor is also unknown ?
Should i pick value for flywheelInertia with autoAdjustDragFactor enabled, then compare power with the actual rower computer ?
Thank you for your work on this project.
Beta Was this translation helpful? Give feedback.
All reactions