Replies: 11 comments 41 replies
-
|
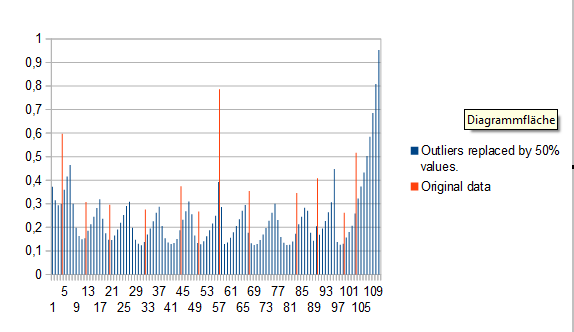
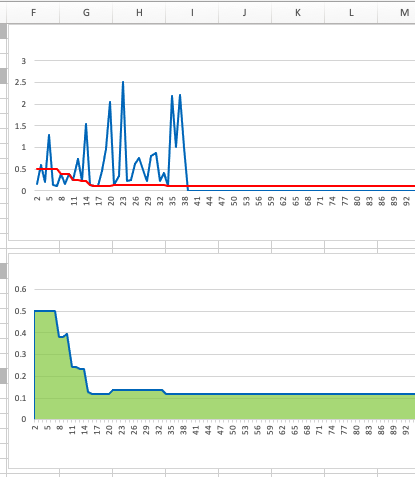
That looks better but it still misses about 10% of all sensor readings:
The red values are twice as high as they should be; most likely because one revolution of the wheel was not read by the sensor and hence it took two revolutions to come up with a value. |
Beta Was this translation helpful? Give feedback.
-
|
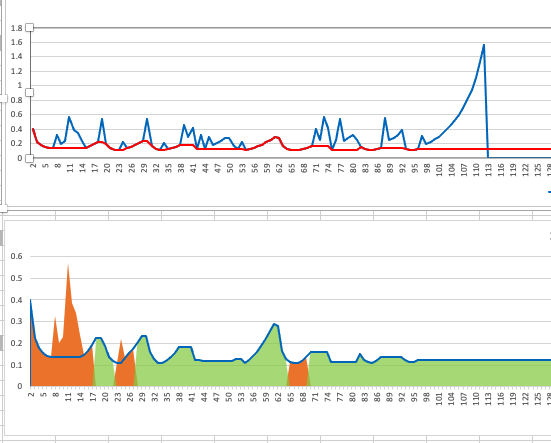
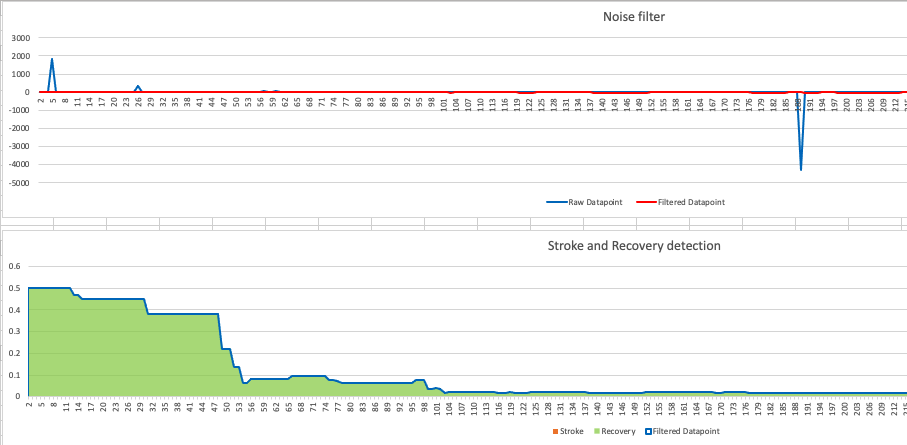
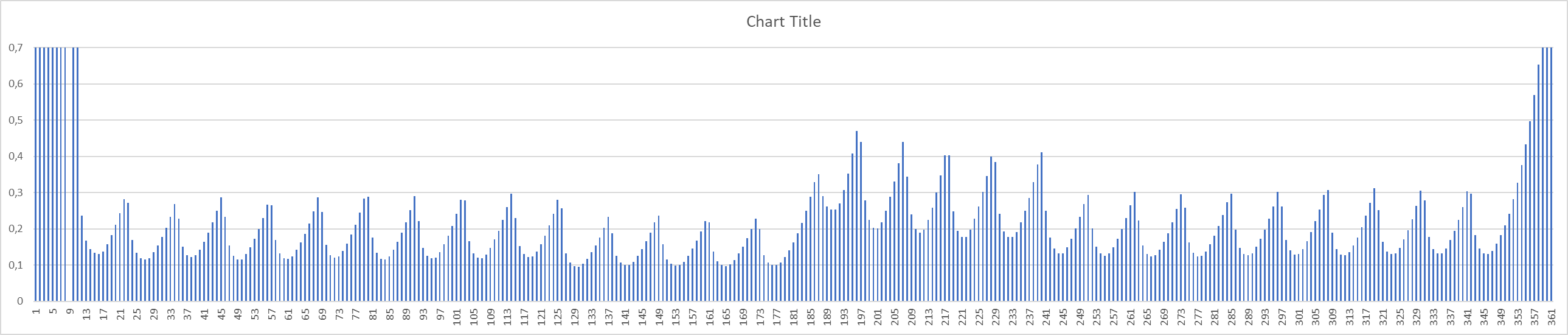
EDIT, as I just saw @Gordon-Shumway2 anwer. Included those in the steps That is good news. I had a look at the data, and it seems that there are missed impulses (those are the upwards spikes). I would try to fine tune the So these are the step I would try (sequential):
You should start every test with the default settings (i.e. when you change the |
Beta Was this translation helpful? Give feedback.
-
|
ok I'll follow your step, gpioTriggeredFlank isn't present in my config.js should I add |
Beta Was this translation helpful? Give feedback.
-
|
Yes, you can add it:
Just above the |
Beta Was this translation helpful? Give feedback.
-
|
gpioTriggeredFlank: 'Down', |
Beta Was this translation helpful? Give feedback.
-
7 cm from center, for me is the maximum possible. (not changed even in test 1) |
Beta Was this translation helpful? Give feedback.
-
|
ok these are valuable tests and Data. I think that what needs to be done is the following: a bigger magnet is needed so the length of a stable reed trigger can be extended so the The important part is that a stable trigger is longer than the bounces so the |
Beta Was this translation helpful? Give feedback.
-
|
Ok what should I do with previus step ?
Up side down seams bad.
|
Beta Was this translation helpful? Give feedback.
-
|
Swap it back :). If an iteration does not improve, then it should be discarded |
Beta Was this translation helpful? Give feedback.
-
|
Sanity check please.... Looking at this video about reed switches and magnet orientation and assuming that the poles on neodym disc-shaped magnets are on the opposing flat sides -see my brain comes up with a weird setup;
Edit: alternatively (in case a cut would compromise the stability of the wood) you could glue two little blocks of wood to one side of the wooden part and squeeze the magnet in between. That should match the setup outlined in the video above at 04:33. @luca-219, please do not try this yet. It seems strange and @Abasz certainly has more experience with reed switches than I have. |
Beta Was this translation helpful? Give feedback.
-
|
So an important thing on my setup (which I noted in the other thread) ,is that I used cylindrical reed switches:
Hence the orientation of my reed is different, so my magnet flat face is actually perpendicular to the side of the reed (the case shown around 9:45 of the video). But I can counter balanced the double trigger (as the video correctly shows as the magnet passes it triggers the reed twice) with settings quite easily. Also the closer the magnet the shorter the dropout is (the time when the reed releases) and it can be so short in case of fast spinning wheels and strong magnet that it does not complete a whole open close cycle and appears as one closed cycle to the Rpi. This achieves the longest trigger time. In terms of the shape of the magnetic field there is no different between neodymium and other types of metals. Its just the strength of the force. But actually the direction in terms of whether the reed gets triggered or not should not matter (as the video shows) but the number of times it gets triggered is (the effect of which can be reduced - and in practice does - and is not detected by pigpio 3 times). That is why I recommended fiddling with the magnet placement. Honestly I find it impossible to find the perfect distance for a signal trigger event (5:30 in the video) for flat side of the magnet if the magnet moves parallel to the reed. BUT, the reed in case of rotation does not move parallel along the length of the reed. Rather crosses the reed while there is a short amount of time when they are aligned. The reason you got better results with the vertical reed alignment is that now the magnet is supposedly moves only in the middle magnetic field (we are not moving the magnet like in the video but the reed crosses magnet ). Theoretically, this position should have produced even cleaner results than my cylindrical reed (as there should have been one trigger on each pass). The only explanation that I can think of is that in this position the reed is not triggered for a sufficient time (which is in theory should not be correct as these fields are 3 dimensional so you can imagine them as kind of rings around the reed, equal to all sides) with the high speed rotations. That is why I recommended testing a stronger magnet. Options:
However, I would start with 1. as it is probably easier to implement. |

Beta Was this translation helpful? Give feedback.
-
|
Exactly. At 6:50 I think was my condition before I turned 90’ my reed. And
after that 0.00x disappear.
|
Beta Was this translation helpful? Give feedback.
-
|
I turned my reed and positioned beside the magnet rather than the middle. |
Beta Was this translation helpful? Give feedback.
-
|
I agree, do you think one magnet would have acceptable accuracy? |
Beta Was this translation helpful? Give feedback.
-
A single magnet could be all you need, especially if you just want to measure time, distance, power, etc.. More advanced metrics like force curves and handle speed curves are less meaningful with one magnet due to the lack of datapoints, but most people don't care about that, so why bother? |
Beta Was this translation helpful? Give feedback.
-
|
Perfect, for the moment I keep one magnet. I like row machine but is a part of cardio training together run , air bike and more. |
Beta Was this translation helpful? Give feedback.
-
with minumumStrokeQuality 0.99 no result in csv file. |
Beta Was this translation helpful? Give feedback.
-
|
raw values do not depend on these settings. These settings only affect stroke detection and othe metrics. Your issue is something different probably hardware related again. Actually only the gpio related settings affect raw values |
Beta Was this translation helpful? Give feedback.
-
|
@JaapvanEkris I have a quick question re. If I set it to What I dont understand is that my expectation with such a high The settings are default except for these: rowerSettings: {
numOfImpulsesPerRevolution: 1,
sprocketRadius: 1.55,
minimumTimeBetweenImpulses: 0.007,
smoothing: 1,
flankLength: 6,
minumumForceBeforeStroke: 2,
minimumStrokeQuality: 1,
minimumDriveTime: 0.200, // minimum time of the drive phase
minimumRecoveryTime: 0.600, // minimum time of the recovery phase
dragFactor: 108,
autoAdjustDragFactor: true,
dragFactorSmoothing: 1,
minimumDragQuality: 0.95,
flywheelInertia: 0.08,
maximumStrokeTimeBeforePause: 6.0
} |
Beta Was this translation helpful? Give feedback.
-
I would be surprised it would work with an absolute 1 as well, but I guess on some machines it could. Your idea is correct, a 1 assumes a perfectly straight line for a minimum set of 6 (= flanklength) samples, which could be happening at some point. As there is only one magnet and it is a simple bicycle wheel there probably would be a very high degree of fit (as you can't misalign a single magnet) at some moment in time. And with a flanklength of 6 and one impulse per rotation (making currentDt rather large), deviations might not be that big in comparison, the degree of fit tends to grow to a higher level as well. But when additional magnets are added at a later stage, you tend to see some noise due to misalignment (no alignment is perfect) and smnaller currentDt's and thus a lower degree of fit as these small deviations might be introduced. I must say, the default value of 0.31 is very conservative: with the Concept2 I now use 0.95 which turns out to be extremely reliable. So touching a 1.0 might be doable. |
Beta Was this translation helpful? Give feedback.
-
|
This is my point. If I run the samples Luca recorded I get the best result with 1 :) I think that is not possible. Especially as the recovery Goodness of fit logged to the console is not always 1 (it is very high like 0.9999 but on 1), also sometimes the whole recovery slope consist of less than 6 samples (4 for instance). This is the output debug log. Based on Based on what gets logged I would expect less than 30 strokes. So there is either a bug, or I dont fully understand the enginge's stroke detection (probably the latter :)) EDIT I did a quick test and reduced the flankLength to 1 (so ORM uses 3 as that is the minimum as far as I see the code) It actually generates even better results with this setting. If you visually expect the chart basically there are generally 6 impulses per recovery phase.
With flankLength of 10 (actually anything above 6) the whole ting dies :) I find this strange as I would have expected better results with higher flankLength. Actually the best result is with flankLength: 3 and minimumStrokeQuality: 1 |
Beta Was this translation helpful? Give feedback.
-
I looked at the log, I agree that at least it is odd, potentially buggy. In the weekend I'll play with the raw data and these settings as well, see what is going on under the hood of Flywheel.js. We are going to learn something one way or the other :)
I am a bit puzzled about the choice for a flanklength of 6, when you only have one magnet per rotation and only 4 datapoints in the entire recovery. That does some weird stuff with the data as you run the risk of completely missing changes. I'd agree that the GoF shouldn't result in 1 as clearly some flanks are included somewhere, so that is worth looking into by itself. But reducing the flanklength to 3 would be wise (i.e. the minimal value). EDIT I would still either reduce the flanklength, or add some magnets if possible, to push data quality a bit further. On a bicycle wheel finding some symmetry might not be that difficult. But that is your call. |
Beta Was this translation helpful? Give feedback.
-
By the the time you wrote the answer already edited my answer with the flankLength 3 that gives the best result. But the point with 6 is that actually 6 data points should be present (visual inspection). Yet ORM only gives us 4 but still works with minimumStrokeQuality of 1. That I cannot understand :) |
Beta Was this translation helpful? Give feedback.
-
I'd actually expected that to happen. This is actually a trick we use on the C2 RowErg: if you reach a certain point, you start creating a straight line throughout these datapoints killing subtle fluctuations. For the C2, we use that to kill noise due to magnet placement errors (setting the flanklength to two full rotations), but making it too large could kill off too many fluctuations. As soon as that goes beyond a certain percentage of your entire stroke, you effectively applying a very effective running median filter on your entire stroke, killing the real movements present in the data needed for stroke detection. |
Beta Was this translation helpful? Give feedback.
-
|
I can't stay with this new fantastic performance monitor without use all functionality :-) |
Beta Was this translation helpful? Give feedback.
-
|
FYI: you have But if the data is good than you can stick with it |
Beta Was this translation helpful? Give feedback.
-
|
thank you, my error now is fixed |
Beta Was this translation helpful? Give feedback.
-
|
Luca, What are we looking at? What is your problem? I've run your raw csv with the settings and I get 10 strokes with quite plausable data. *** WARNING: currentDt of 94.466749 sec isn't between 0 and maximumStrokeTimeBeforePause (6 sec)
*** Rowing (re)started with a DRIVE phase at time: 0.0000 sec
*** ALLOW MOVEMENT command by RowingEngine recieved at time: 0.0000 sec
stroke: 0, dist: 0.0m, speed: 0.00m/s, pace: Infinity/500m, power: 0W, cal: 0.0kcal, SPM: 0.0, drive dur: NaNs, rec. dur: NaNs, stroke dur: NaNs, dragFactor: 108
*** Rowing (re)started with a DRIVE phase at time: 0.5000 sec
*** RECOVERY phase started at time: 1.4011 sec
*** DRIVE phase started at time: 2.6978 sec
*** Calculated drag factor: 1629.1181, no. samples: 13, Goodness of Fit: 0.9804
*** Calculated recovery slope: 0.063975, Goodness of Fit: 0.9804, not used as autoAdjustRecoverySlope isn't set to true
stroke: 2, dist: 2.4m, speed: 1.14m/s, pace: 7:17/500m, power: 4W, cal: 0.1kcal, SPM: 38.7, drive dur: 0.90s, rec. dur: 1.30s, stroke dur: 1.55s, dragFactor: 1629.118137312263
*** RECOVERY phase started at time: 3.2939 sec
*** DRIVE phase started at time: 4.4307 sec
*** Calculated drag factor: 1769.6014, no. samples: 13, Goodness of Fit: 0.9982
*** Calculated recovery slope: 0.069492, Goodness of Fit: 0.9982, not used as autoAdjustRecoverySlope isn't set to true
stroke: 3, dist: 8.2m, speed: 2.11m/s, pace: 3:57/500m, power: 42W, cal: 0.4kcal, SPM: 33.1, drive dur: 0.75s, rec. dur: 1.22s, stroke dur: 1.81s, dragFactor: 1769.6014367176435
*** RECOVERY phase started at time: 5.1400 sec
*** DRIVE phase started at time: 6.2745 sec
*** Calculated drag factor: 1723.8586, no. samples: 13, Goodness of Fit: 0.9984
*** Calculated recovery slope: 0.067696, Goodness of Fit: 0.9984, not used as autoAdjustRecoverySlope isn't set to true
stroke: 4, dist: 14.4m, speed: 3.19m/s, pace: 2:37/500m, power: 91W, cal: 0.7kcal, SPM: 32.5, drive dur: 0.71s, rec. dur: 1.14s, stroke dur: 1.84s, dragFactor: 1723.8585558637367
*** RECOVERY phase started at time: 6.9717 sec
*** DRIVE phase started at time: 8.0947 sec
*** Calculated drag factor: 1766.2730, no. samples: 13, Goodness of Fit: 0.9984
*** Calculated recovery slope: 0.069361, Goodness of Fit: 0.9984, not used as autoAdjustRecoverySlope isn't set to true
stroke: 5, dist: 20.6m, speed: 3.36m/s, pace: 2:29/500m, power: 106W, cal: 1.0kcal, SPM: 32.6, drive dur: 0.70s, rec. dur: 1.14s, stroke dur: 1.84s, dragFactor: 1766.2730474513532
*** RECOVERY phase started at time: 8.9691 sec
*** DRIVE phase started at time: 10.0310 sec
*** Calculated drag factor: 1755.9510, no. samples: 11, Goodness of Fit: 0.9958
*** Calculated recovery slope: 0.068956, Goodness of Fit: 0.9958, not used as autoAdjustRecoverySlope isn't set to true
stroke: 6, dist: 27.0m, speed: 3.36m/s, pace: 2:29/500m, power: 106W, cal: 1.4kcal, SPM: 32.5, drive dur: 0.71s, rec. dur: 1.13s, stroke dur: 1.84s, dragFactor: 1755.9510459473347
*** RECOVERY phase started at time: 10.8084 sec
*** DRIVE phase started at time: 11.8728 sec
*** Calculated drag factor: 1742.7838, no. samples: 11, Goodness of Fit: 0.9978
*** Calculated recovery slope: 0.068439, Goodness of Fit: 0.9978, not used as autoAdjustRecoverySlope isn't set to true
stroke: 7, dist: 33.2m, speed: 3.36m/s, pace: 2:29/500m, power: 106W, cal: 1.7kcal, SPM: 32.6, drive dur: 0.74s, rec. dur: 1.13s, stroke dur: 1.84s, dragFactor: 1742.7838495975577
*** RECOVERY phase started at time: 12.5251 sec
*** DRIVE phase started at time: 13.6667 sec
*** Calculated drag factor: 1819.6837, no. samples: 13, Goodness of Fit: 0.9984
*** Calculated recovery slope: 0.071459, Goodness of Fit: 0.9984, not used as autoAdjustRecoverySlope isn't set to true
stroke: 8, dist: 39.4m, speed: 3.36m/s, pace: 2:29/500m, power: 106W, cal: 2.0kcal, SPM: 32.6, drive dur: 0.70s, rec. dur: 1.13s, stroke dur: 1.84s, dragFactor: 1819.6836561153075
*** RECOVERY phase started at time: 14.5442 sec
*** DRIVE phase started at time: 15.5866 sec
*** Calculated drag factor: 1739.1550, no. samples: 11, Goodness of Fit: 0.9980
*** Calculated recovery slope: 0.068296, Goodness of Fit: 0.9980, not used as autoAdjustRecoverySlope isn't set to true
stroke: 9, dist: 45.9m, speed: 3.38m/s, pace: 2:28/500m, power: 108W, cal: 2.4kcal, SPM: 32.6, drive dur: 0.74s, rec. dur: 1.09s, stroke dur: 1.84s, dragFactor: 1739.1549962253284
*** RECOVERY phase started at time: 16.3327 sec
*** DRIVE phase started at time: 17.5145 sec
*** Calculated drag factor: 1801.5612, no. samples: 13, Goodness of Fit: 0.9983
*** Calculated recovery slope: 0.070747, Goodness of Fit: 0.9983, not used as autoAdjustRecoverySlope isn't set to true
stroke: 10, dist: 52.3m, speed: 3.37m/s, pace: 2:28/500m, power: 107W, cal: 2.7kcal, SPM: 32.3, drive dur: 0.76s, rec. dur: 1.09s, stroke dur: 1.86s, dragFactor: 1801.5612332106289
*** RECOVERY phase started at time: 18.2719 sec
*** WARNING: currentDt of 0.50774 sec is above maximumTimeBetweenImpulses (0.5 sec)
*** WARNING: currentDt of 0.542265 sec is above maximumTimeBetweenImpulses (0.5 sec)
*** WARNING: currentDt of 0.60157 sec is above maximumTimeBetweenImpulses (0.5 sec)
*** WARNING: currentDt of 0.644957 sec is above maximumTimeBetweenImpulses (0.5 sec) |
Beta Was this translation helpful? Give feedback.
-
|
Please note that this Excel file isn't working for OpenRowingMonitor V1Beta anymore: it depends on an approach that we thankfully could abandon. The approach used by @Abasz is the correct one: look at the logs and ORM itself will tell you were the issue is. |
Beta Was this translation helpful? Give feedback.
-
ok , no problem it was just to confirm the output |
Beta Was this translation helpful? Give feedback.
-
can I find a compatibile Excel file? |
Beta Was this translation helpful? Give feedback.
-
As I said in my original post: the Excel has been abandoned and you have to look at the logs, following the metrics configuration manual: https://github.com/JaapvanEkris/openrowingmonitor/blob/v1beta_updates/docs/rower_settings.md |
Beta Was this translation helpful? Give feedback.
-
|
In my opinion all work fine and I'm going to close setting. }, and result |
Beta Was this translation helpful? Give feedback.
-
|
please see docs: https://github.com/laberning/openrowingmonitor/blob/v1beta/docs/physics_openrowingmonitor.md#determining-the-drag-factor-of-the-flywheel |
Beta Was this translation helpful? Give feedback.
-
|
I read the document , but I have a doubt 1700 could be a valid value? I sow
in ather setting Numbers between 100/150 , 1700 what do you think?
|
Beta Was this translation helpful? Give feedback.
-
|
Don't worry, 1700 is a valid value. It all depends on your type of rower - a water-based rower will have a different dragfactor than an air-based rower. My old magnetic rower had a drag factor of about 32.000 (thirty-two thousand), my current water-rower has a DF of 28,000. Please check your config again: dragFactor: 108, You are manually setting a drag factor of 108 and then enable automatic calculation of the drag factor. This works, but might cause confusion later on when you revisit the config. You should remove/comment the first line. Cheers, |
Beta Was this translation helpful? Give feedback.
-
The dragFactor value is used for the first stroke (as there could not be any DF) to calculate some approximate metrics (that are recalculated once there is a valid DF). No need to worry about that setting if autAdjustDragFactor is enabled. Actually the idea is used by C2 PM5 as well. There is a possibility to trick the machine into thinking one rowed significantly more: https://www.youtube.com/watch?v=-aDELD29Zxo |
Beta Was this translation helpful? Give feedback.
-
|
ok thank you for great work and support |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
After all your suggestions in previus topick I got a stable result. (seems)
I use small neodymium magnet and I turn 90° reed sensor (image below).
Stable result.
2023-01-31_16-39-55_raw.csv
gpioMinimumPulseLength: 120,
rowerSettings: {
numOfImpulsesPerRevolution: 1,
sprocketRadius: 1.55,
minimumTimeBetweenImpulses: 0.007,
smoothing: 1,
flankLength: 6,
minumumForceBeforeStroke: 2,
minimumStrokeQuality: 0.6,
minimumDriveTime: 0.200, // minimum time of the drive phase
minimumRecoveryTime: 0.600, // minimum time of the recovery phase
dragFactor: 108,
autoAdjustDragFactor: true,
dragFactorSmoothing: 1,
minimumDragQuality: 0.97,
flywheelInertia: 0.08,
maximumStrokeTimeBeforePause: 6.0
Beta Was this translation helpful? Give feedback.
All reactions