Segmentation Network for Sparse data, pos=pos, x=None, y=len(n_points) #4434
Replies: 1 comment 2 replies
-
|
Thanks for your interest. We have a few examples regarding segmentation of point clouds, e.g., here and here. Note that normals are definitely not required for these examples. All these examples work for varying number of points and make use of |
Beta Was this translation helpful? Give feedback.
-
|
Thanks @rusty1s , I think those two links are for the same script.
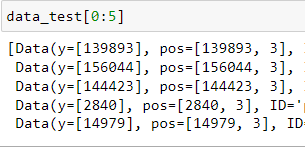
My data: Any advice would be greatly appreciated thank you |


Beta Was this translation helpful? Give feedback.
-
|
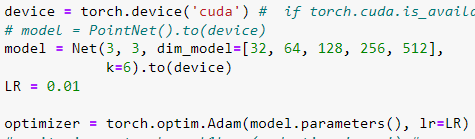
Fixed the link above. You need to initialize your model with |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
I'm struggling to find a network for my task even though my task is a common one.
I just want to do point cloud semantic segmentation. I don't have normals, and each point has a class label.
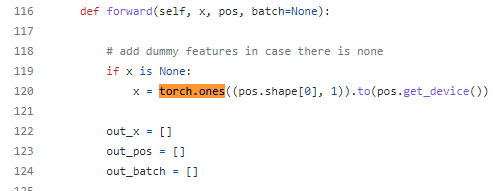
Preferably the network can generate graphs on the fly in the forward pass using:
edge_index = knn_graph(pos, k=K, batch=batch, loop=LOOP)
Is it true that I have to use messagePassing if each example has a different number of samples (points)? Sparse data - but the mean number of points per example / point cloud = 50,000.
It would be great to use pointTransformer or similar, but it doesn't use MessagePassing.
Is there any existing code/network I can use in the pyG documentation?
Thank you
Beta Was this translation helpful? Give feedback.
All reactions