You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
**Note:** The RTK Express Plus does not support Base mode. The Express Press contains an internal IMU and additional algorithms to support high-precision location fixes using dead reckoning.
6
-
7
-
**Note:** The RTK Facet L-Band is designed to use corrections provided via u-blox's PointPerfect system therefore, a Base/Rover setup is not needed. However, if the service is not available the RTK Facet L-Band can still be used in a traditional Base/Rover setup. Here we’ll describe how to assemble a Rover and Base.
8
-
9
5
In addition to providing accurate local location fixes, the SparkFun RTK devices can also serve as a correction source, also called a *Base*. The Base doesn't move and 'knows' where it is so it can calculate the discrepancies between the signals it is receiving and what it should be receiving. Said differently, the 'Base' is told where it is, and that it's not moving. If the GPS signals say otherwise, the Base knows there was a disturbance in the ~~Force~~ ionosphere. These differences are the correction values passed to the Rover so that the Rover can have millimeter-level accuracy.
10
6
11
7
There are two types of bases: *Surveyed* and *Fixed*. A surveyed base is often a temporary base set up in the field. Called a 'Survey-In', this is less accurate but requires only 60 seconds to complete. The 'Fixed' base is much more accurate but the precise location at which the antenna is located must be known. A fixed base is often a structure with an antenna bolted to the side. Raw satellite signals are gathered for a few hours and then processed using Precision Point Position. We have a variety of tutorials that go into depth on these subjects but all you need to know is that the RTK Facet supports both Survey-In and Fixed Base techniques.
12
8
9
+
**Note:** The RTK Express Plus does not support Base mode. The Express Press contains an internal IMU and additional algorithms to support high-precision location fixes using dead reckoning.
10
+
11
+
**Note:** The RTK Facet L-Band is designed to use corrections provided via u-blox's PointPerfect system therefore, a Base/Rover setup is not needed. However, if the service is not available the RTK Facet L-Band can still be used in a traditional Base/Rover setup. Here we’ll describe how to assemble a Rover and Base.
12
+
13
13
Please see the following tutorials for more information:
Copy file name to clipboardExpand all lines: docs/configure_gnss.md
+1-1Lines changed: 1 addition & 1 deletion
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -42,7 +42,7 @@ The ZED-F9P is capable of tracking 184 channels across four constellations and t
42
42
43
43
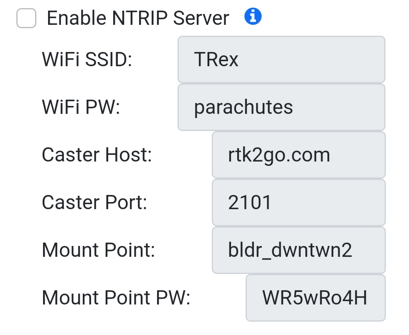
*NTRIP Client enabled showing settings*
44
44
45
-
The SparkFun RTK devices can obtain their correction data over a few different methods:
45
+
The SparkFun RTK devices can obtain their correction data over a few different methods. For detailed information see [Correction Sources](https://docs.sparkfun.com/SparkFun_RTK_Firmware/correction_sources/).
46
46
47
47
* Bluetooth - This is the most common. An app running on a tablet or phone has an NTRIP client built into it. Once the phone is connected over Bluetooth SPP, the RTCM is sent from the phone to the RTK device.
48
48
* Radio - A base RTK unit and a rover have serial radios plugged into the **RADIO** port. RTCM data generated by the base station is set over the radio to the rover.
Copy file name to clipboardExpand all lines: docs/configure_messages.md
+113-1Lines changed: 113 additions & 1 deletion
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -41,12 +41,124 @@ These seven sentences are commonly used when logging and doing Precise Point Pos
41
41
42
42
*Configuring the NMEA messages*
43
43
44
-
As mentioned in the microSD section of the [Hardware Overview](https://sparkfun.github.io/SparkFun_RTK_Firmware/hardware_rtk_facet/#microsd) there are a large number of messages supported. Each message sub-menu will present the user with the ability to set the message report rate.
44
+
There are a large number of messages supported (listed below). Each message sub-menu will present the user with the ability to set the message report rate.
45
45
46
46
Each message rate input controls which messages are disabled (0) and how often the message is reported (1 = one message reported per 1 fix, 5 = one report every 5 fixes). The message rate range is 0 to 20.
47
47
48
48
**Note:** The message report rate is the *number of fixes* between message reports. In the image above, with GSV set to 4, the NMEA GSV message will be produced once every 4 fixes. Because the device defaults to a 4Hz fix rate, the GSV message will appear once per second.
49
49
50
+
The following 67 messages are supported for Bluetooth output and logging:
This will turn off all messages. This is handy for advanced users who need to start from a blank slate. This setting is only available over serial configuration.
Copy file name to clipboardExpand all lines: docs/connecting_bluetooth.md
+1-1Lines changed: 1 addition & 1 deletion
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -14,7 +14,7 @@ Open Android's system settings and find the 'Bluetooth' or 'Connected devices' o
14
14
15
15
When powered on, the RTK product will broadcast itself as either '[Platform] Rover-5556' or '[Platform] Base-5556' depending on which state it is in. [Platform] is Facet, Express, Surveyor, etc. Discover and pair with this device from your phone or tablet. Once paired, open SW Maps.
16
16
17
-

17
+

18
18
19
19
*Bluetooth MAC address B022 is shown in the upper left corner*
**Note:** The RTK Facet L-Band is capable of receiving RTCM corrections from a terrestrial source but because it has a built-in L-Band receiver, we recommend using the satellite-based corrections.
6
-
7
5
To achieve an RTK Fix, SparkFun RTK products must be provided with a correction source. This correction data, sometimes called RTCM (see [What is RTCM?](https://learn.sparkfun.com/tutorials/what-is-gps-rtk/all#what-is-rtcm)), can be produced from a variety of sources.
8
6
7
+
**Note:** The RTK Facet L-Band is capable of receiving RTCM corrections from a terrestrial source but because it has a built-in L-Band receiver, we recommend using the satellite-based corrections.
8
+
9
9
## Permanent Base
10
10
11
11

@@ -20,7 +20,9 @@ A permanent base is a user-owned and operated base station. See [Creating a Perm
20
20
21
21
*Temporary RTK Express Base setup with serial radio*
22
22
23
-
A temporary or mobile base setup is needed when you are in the field too far away from a correction source and/or cellular reception. A 2nd RTK device is mounted to a tripod and it is configured to complete a survey-in (aka, locate itself). It will then begin broadcasting RTCM correction data. This data (~1000 bytes a second) is sent over a data link to one or multiple rovers that can then obtain RTK Fix.
23
+
A temporary or mobile base setup is handy when you are in the field too far away from a correction source, or if your measurements do not require absolute accuracy.
24
+
25
+
To set up a temporary base, a 2nd RTK device is mounted to a tripod and it is configured to complete a survey-in (aka, locate itself). It will then begin broadcasting RTCM correction data. This data (~1000 bytes a second) is sent over a data link to one or multiple rovers that can then obtain RTK Fix.
24
26
25
27
Any tripod with a ¼” camera thread will work. The [Amazon Basics tripod](https://www.amazon.com/AmazonBasics-Lightweight-Camera-Mount-Tripod/dp/B00XI87KV8) works well enough but is a bit lightweight and rickety.
Once a [correction source](https://docs.sparkfun.com/SparkFun_RTK_Firmware/correction_sources/) is chosen, the correction data must be transported from the base to the rover. The RTCM serial data is approximately 530 bytes per second and is transmitted at 57600bps out of the **RADIO** port on a SparkFun RTK device.
4
6
5
7
There are a variety of ways to move data from a base to a rover. We will cover the most common below.
6
8
7
9
Note: RTK calculations require RTCM data to be delivered approximately once per second. If RTCM data is lost or not received by a rover, RTK Fix can still be maintained for many seconds before the device will enter RTK Float mode. This is beneficial where devices like Serial Radios may drop packets due to RF congestion.
8
10
11
+
**Note:** The RTK Facet L-Band is capable of receiving RTCM corrections from a terrestrial source but because it has a built-in L-Band receiver, we recommend using the satellite-based corrections.
12
+
9
13
## WiFi
10
14
11
15
Copy file name to clipboardExpand all lines: docs/system_status_report.md
+1-1Lines changed: 1 addition & 1 deletion
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -28,4 +28,4 @@ Below is an example system status report sentence:
28
28
* 86 : Battery level (% remaining)
29
29
**71 : The completion of the sentence and a [CRC](http://engineeringnotes.blogspot.com/2015/02/generate-crc-for-nmea-strings-arduino.html)
30
30
31
-
**Note:** This is a custom NMEA sentence, can vary in length, and may exceed the [maximum](https://www.nmea.org/Assets/20160520%20txt%20amendment.pdf) permitted sentence length](https://www.nmea.org/Assets/20160520%20txt%20amendment.pdf) of 61 characters.
31
+
**Note:** This is a custom NMEA sentence, can vary in length, and may exceed the [maximum permitted sentence length](https://www.nmea.org/Assets/20160520%20txt%20amendment.pdf) of 61 characters.
0 commit comments