Slow sway on robots with larger ankle flexibility #28
Replies: 2 comments
-
|
The problem is solved by a (major) one-line change in
return {pendulum_.com().cross(desiredForce), desiredForce};
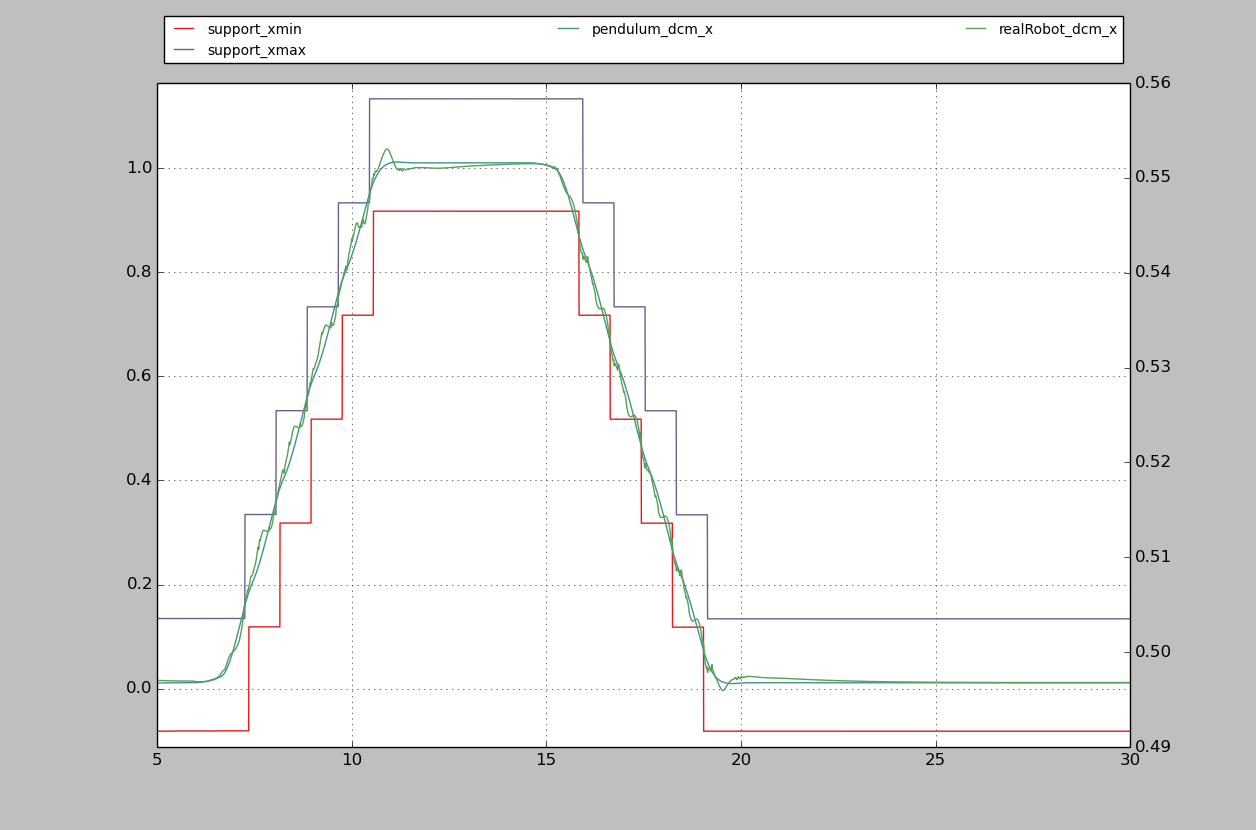
return {measuredCoM_.cross(desiredForce), desiredForce};Oscillations previously observed vanish:
However, this also makes balance control more "nervous" and DCM gains should be tuned down accordingly. This is a major change in the controller. Once tested and documented it will get its own release. |
Beta Was this translation helpful? Give feedback.
-
|
Closing this issue as this has been tested on HRP-2Kai. The main consequence of this change is that we can go to lower DCM gains (e.g. |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
On HRP-2Kai, which has larger ankle flexibility than HRP-4, we observe some slow oscillations after walking:
The robot successfully stops, then seems to sway back and forth on its own "volition".
Beta Was this translation helpful? Give feedback.
All reactions