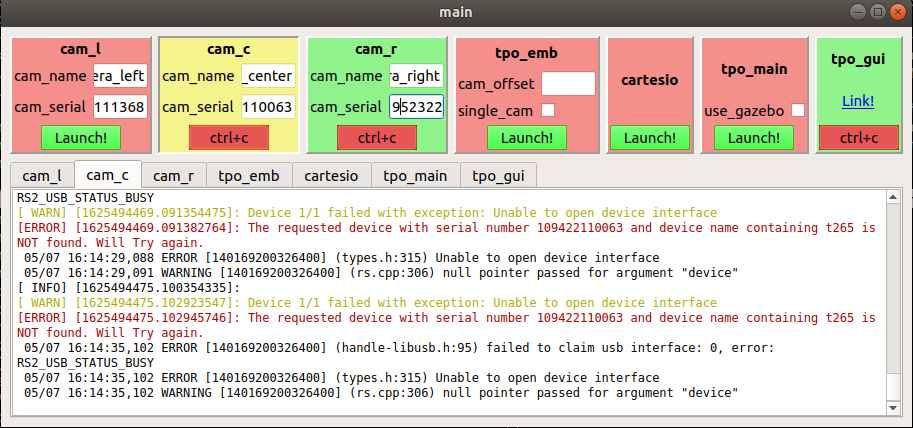
TelephysicalOperation Gui to make it easy enjoy new experiments. It has all the buttons for each roslaunches of the project. The most common params of the roslaunches can be changed. Colors helps understantding what it is good and what it is failed. Only-read terminals are associated and visible one at once to understand what each QProcess (ie roslaunch) is doing
part of the TelephysicalOperation project
- QT5 (version coming with ubuntu 18 and ros melodic is sufficient)
- xbot2 for the future integration with the xbot2 gui (robot monitoring)