Ground Station
The ground station is a collection of APIs, interfaces, and team-written processing code that serves as a bridge between iridium packets sent to/from the Alpha CubeSat and the front-end/back-end interfaces that make the bytes of data user-centric and understandable. The diagram below details different parts of the ground station and how they interact with each other.
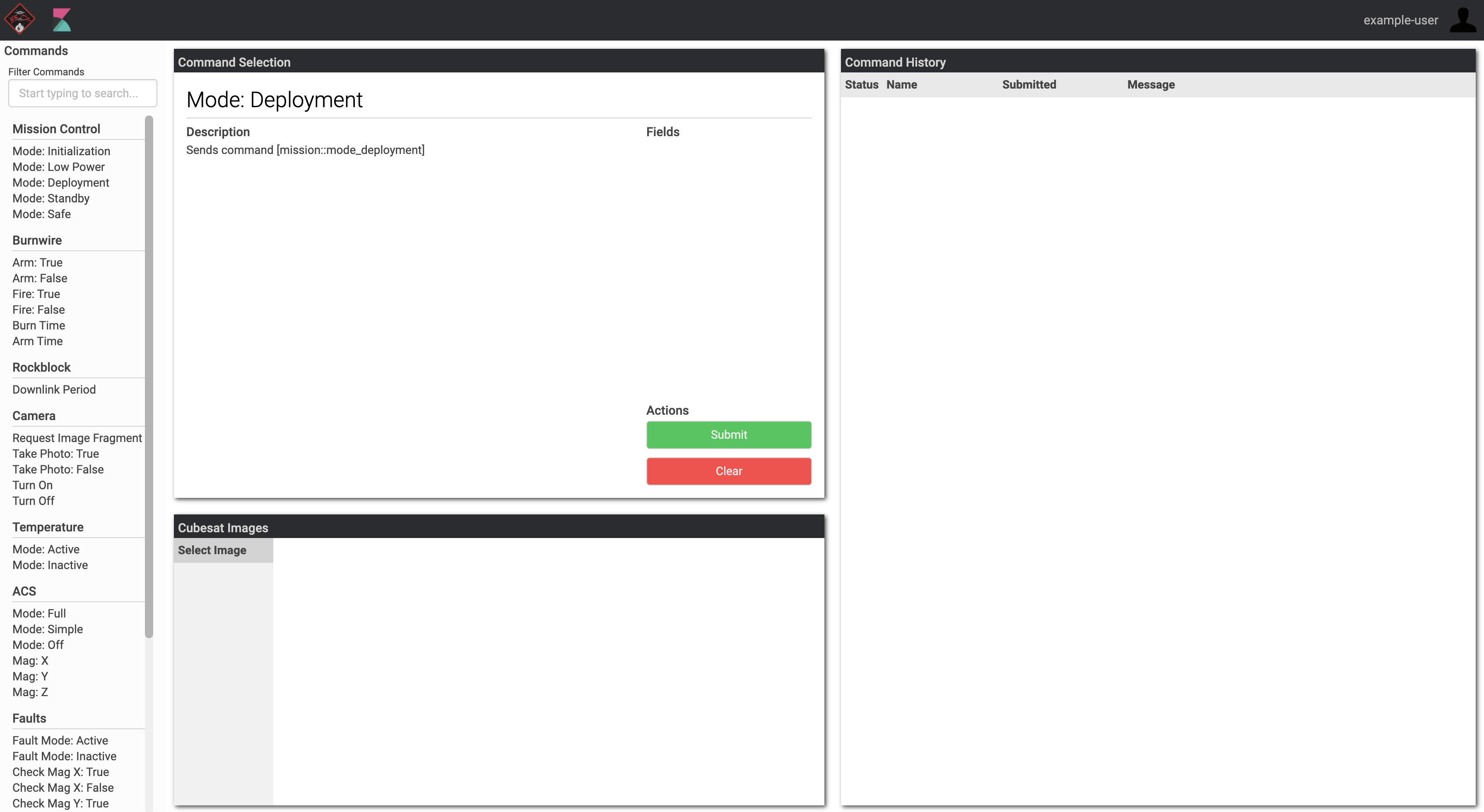
The Control UI is a tool developed by the Alpha Software team members (current and former). It allows for uplinking commands to the CubeSat and changing values. A screenshot of this interface is shown below.
The front end of the ground station has two main components. One is the Kibana dashboard which shows downlinked data from the Cubesat. This includes data such as plots of gyroscope values, the current mission mode, and battery voltage among other characteristics. The Kibana UI also allows for viewing raw data for reports in a JSON format. A screenshot of the current interface is shown below.

This part of the back-end unit has been developed by Alpha Software team members. It connects with the RockBlock API as well as Elasticsearch. The ground station code processes report as they are downlinked and first appear in the RockBlock portal. From there, once the stream of bits has been transformed into a more user-friendly format -- the code is pushed to the ElasticSearch database.
Elasticsearch is the database used to store report data that has been downlinked from the CubeSat. It connects to the Kibana dashboard leading to seamless updates whenever a new time range is selected.
There are 3 main types of reports that the Ground Web Services part of the ground station currently processes.
- Normal Report
- IMU Downlink Report
- Camera Report
The Normal report downlinks a variety of satellite-specific general data.
Format for downlinked data.
| Index | Data | Min (if applicable) | Max (if applicable) |
|---|---|---|---|
| 0 | 99 (flag in decimal) | N/A | N/A |
| 1 | photoresistor covered | ||
| 2 | button pressed | ||
| 3 | mission mode | ||
| 4 | burn wire fire | ||
| 5 | burn wire arm | ||
| 6 | burn wire time | 0 | 60000 |
| 7 | burn wire armed time | 0 | 86400000 |
| 8 | burn wire mode | ||
| 9 | burn wire attempts | 10 | |
| 10 | downlink period | 1000 | 172800000 |
| 11 | waiting message | ||
| 12 | waiting command | ||
| 13 | mag_x | 0.0 | 0.0 |
| 14 | mag_y | 0.0 | 0.0 |
| 15 | mag_z | 0.0 | 0.0 |
| 16 | gyro_x | 0.0 | 0.0 |
| 17 | gryo_y | 0.0 | 0.0 |
| 18 | gyro_z | 0.0 | 0.0 |
| 19 | temperature | 200 | |
| 20 | temperature mode | ||
| 21 | solar current | 500 | |
| 22 | in sun | ||
| 23 | acs mode | ||
| 24 | voltage | 3 | 5 |
| 25 | fault mode | ||
| 26 | mag_x fault check | ||
| 27 | mag_y fault check | ||
| 28 | mag_z fault check | ||
| 29 | gyro_x fault check | ||
| 30 | gyro_y fault check | ||
| 31 | gyro_z fault check | ||
| 32 | temp fault check | ||
| 33 | voltage fault check | ||
| 34 | solar fault check | ||
| 35 | take photo | ||
| 36 | camera powered | ||
| ... | opcodes of received commands | ||
| report.size() - 2 | 254 (end flag 1) | ||
| report.size() - 2 | 255 (end flag 2) |
The IMU downlink report downlink a series of x, y, and z gyro values. These values help determine what the movement of the CubeSat is looking like in space and are a vital part of determining if the CubeSat is stable.
Format for downlinked data.
| Index | Data |
|---|---|
| 0 | 24 (flag in decimal) |
| 2 | fragment number |
| 4 | x-gyro value |
| 6 | y-gyro value |
| 8 | z-gyro value |
| 10 | x-gyro value |
| 12 | y-gyro value |
| 14 | z-gyro value |
| ... | |
| 130 | x-gyro value |
| 132 | y-gyro value |
| 134 | z-gyro value |
The Camera report downlinks image fragments. The Ground station then assembles these image fragments and creates a full image.
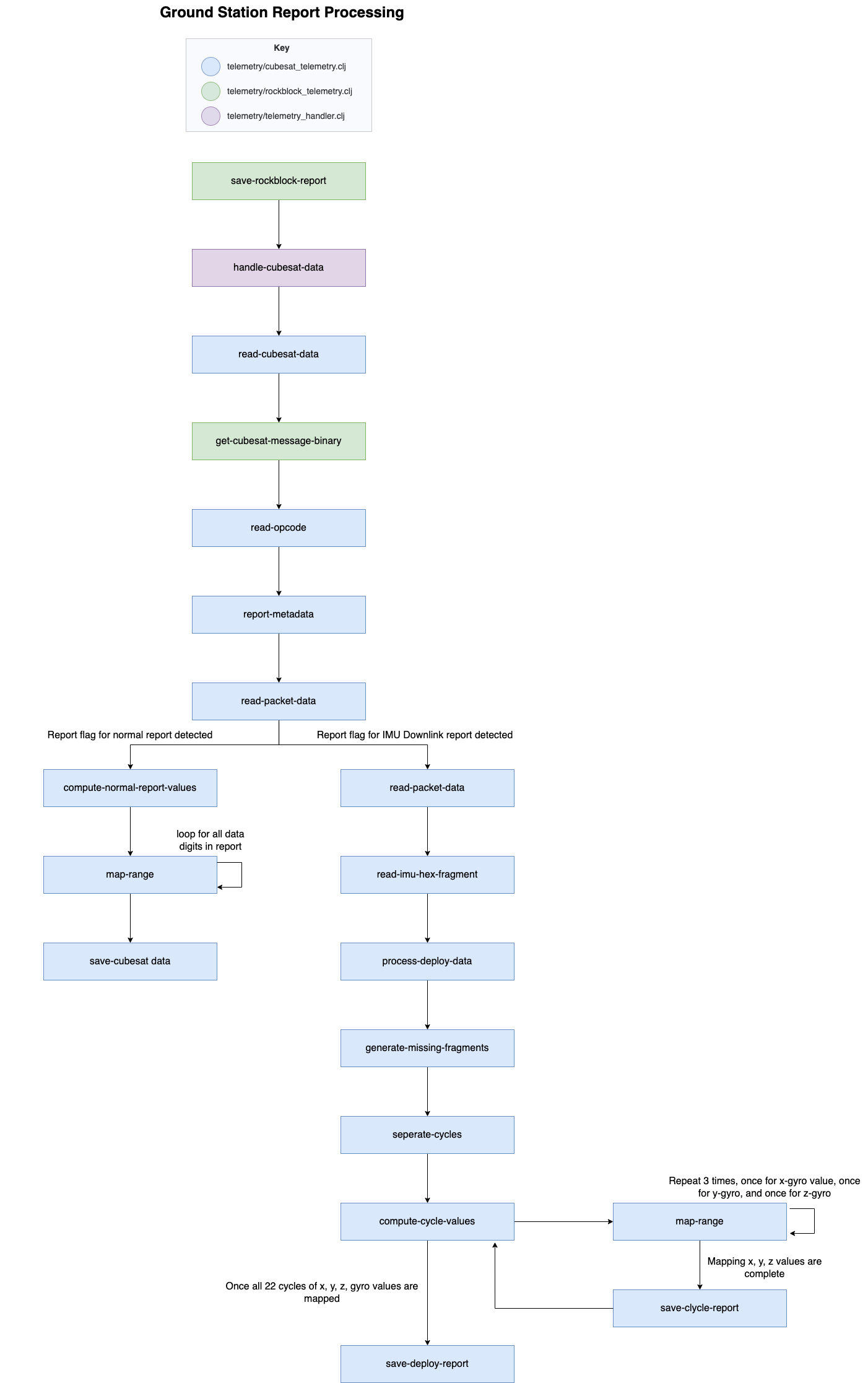
Below is a diagram showing how reports are processed in the ground station backend.