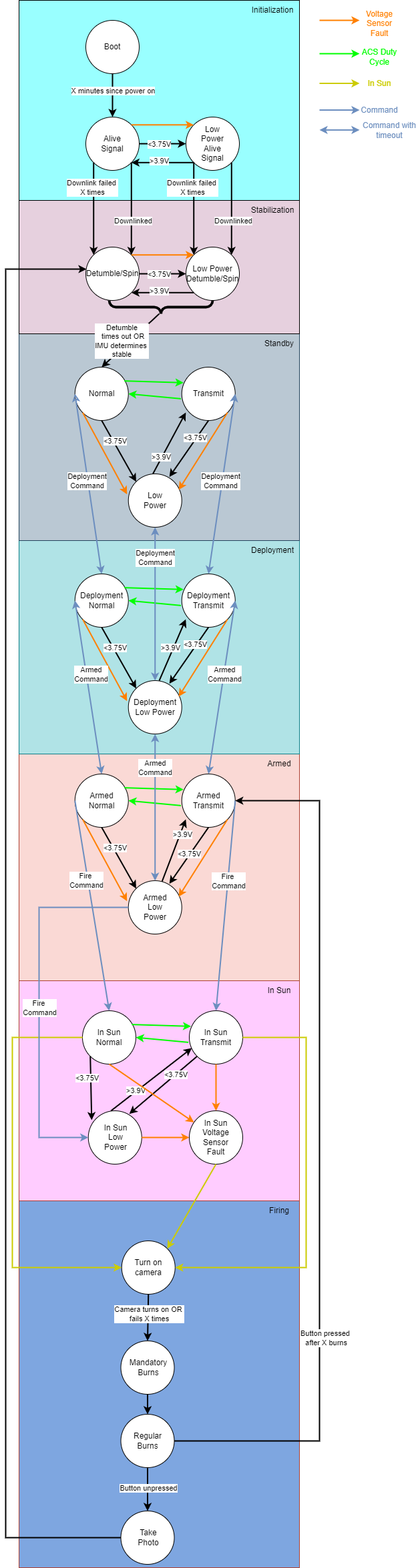
Mission Modes
- Sets all relevant settings in the SFR. Optionally sets the start time of the mode
- Checks exit conditions
- Stores when the mission mode started
- Returns numerical representation of mode for comparisons
- Returns either NORMAL, TRANSMIT, LP, or OTHER
Exit conditions for Boot:
- Two hours have elapsed
Exit conditions for Alive Signal and Low Power Alive Signal:
- X minutes have elapsed in Alive Signal and/or Low Power Alive Signal
- RockBLOCK downlink hard faults
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Boot | The RockBLOCK may not be on during this time due to CubeSat's proximity to the ISS. | Sleep mode | Off | Off |
| Alive Signal | This mode allows us to communicate with the CubeSat at one time before the ACS is activated. | Downlink period of X minutes | Off | Off |
| Low Power Alive Signal | This is the power saving version of Alive Signal. | Downlink period of X minutes | Off | Off |
Stabilization phase exit conditions:
- IMU values determine that the CubeSat is stable
- X minutes have elapsed in the Stabilization phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Detumble & Spin | This mode gives an opportunity for spin stabilization at the beginning of the mission. | Off | Detumble & Spin | On |
| Low Power Detumble & Spin | This is the power saving version of Detumble & Spin. | Off | Off | Off |
Standby phase exit conditions:
- Deployment command received
- X minutes have elapsed in the Standby phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Normal | The CubeSat performs | Sleep mode | Pointing or Simple | On |
| Transmit | TODO | Downlink period of X minutes | Off | Off |
| Low Power | TODO | Downlink period of X minutes | Off | Off |
Deployment phase exit conditions:
- Armed command received
- X minutes have elapsed in the Deployment phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Deployment Normal | TODO | Sleep mode | Pointing or Simple | On |
| Deployment Transmit | TODO | Downlink period of X minutes | Off | Off |
| Deployment Low Power | TODO | Downlink period of X minutes | Off | Off |
Armed phase exit conditions:
- Fire command received
- X minutes have elapsed in the Armed phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Armed Normal | TODO | Sleep Mode | Pointing or Simple | On |
| Armed Transmit | TODO | Downlink period of X minutes | Off | Off |
| Armed Low Power | TODO | Downlink period of X minutes | Off | Off |
In Sun phase exit conditions:
- Temperature sensor readings are valid and the temperature determines the CubeSat is in sun
- Temperature sensor readings are invalid, current sensor readings are valid and current determines the CubeSat is in sun
- Temperature sensor readings are invalid and temperature sensor readings are invalid
- X minutes have elapsed in the Armed phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| In Sun Normal | TODO | Sleep mode | Pointing or Simple | On |
| In Sun Transmit | TODO | Downlink period of X minutes | Off | Off |
| In Sun Low Power | TODO | Downlink period of X minutes | Off | Off |
| In Sun Voltage Sensor Fault | TODO | Downlink period of X minutes | Off | Off |
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Turn on Camera | TODO | TODO | Off | Off |
| Mandatory Burns | TODO | TODO | Off | Off |
| Regular Burns | TODO | TODO | Off | Off |
| Take Photo | TODO | TODO | Off | Off |
Fix diagram to show transitions between each version of each mode rather than default mode
- Should alive signal allow for multiple RockBLOCK hard faults?
- Should IMU be on during boot?
- How does the IMU determine the CubeSat is stable during Detumble & Spin? Could ACS still be on but just in a different mode like pointing?
- What are all of the downlink period/timeouts?
- How do timeouts for phases work?
- If IMU is in invalid state in detumble and spin do we just keep attempting reinitialization until the phase times out? How does that work with the power budget
- Should we always ignore the photoresistor?
- If temperature sensor readings are invalid and current sensor readings are invalid should we really proceed straight from in sun?