Mission Modes
- Sets all relevant settings in the SFR. Optionally sets the start time of the mode
- Checks exit conditions
- Stores when the mission mode started
- Returns numerical representation of mode for comparisons
- Returns either NORMAL, TRANSMIT, LP, or OTHER
- If currently in an Low Power mode, exit is the voltage sensor readings are valid and greater than 3.9V
- If currently in a Non-Low Power Mode, exit if voltage sensor readings are invalid OR voltage sensor readings are valid and below 3.75V
- If currently in an ACS mode, exit if the ACS mode max time has passed
- If currently in a non ACS mode, exit if (orbit period - the ACS mode max time) has passed
For example, if the orbit period is 100 minutes and the ACS mode max time is 5 minutes, exit the ACS mode after 5 minutes and the non ACS mode after the next 95 minutes.
- Downlinks if downlink period has been reached and in a transmit mode (normal report)
- Downlinks if in a transmit mode and report is ready (imu and camera reports)
- If RockBLOCK downlink hard faults once exit the transmit mode
- In low power mode only allow normal reports
- One downlink period but alternate between the types of reports
- Reset downlink period if
- have been attempting to downlink for 1 minute
- successfully downlinked
- hard faulted twice
TODO: Consider what happens if there are messages in the buffer when we downlink
Exit conditions for Boot:
- Two hours have elapsed
Exit conditions for Alive Signal and Low Power Alive Signal:
- X minutes have elapsed in Alive Signal and/or Low Power Alive Signal
- RockBLOCK downlink hard faults
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Boot | The RockBLOCK may not be on during this time due to CubeSat's proximity to the ISS. | Sleep mode | Off | Off |
| Alive Signal | This mode allows us to communicate with the CubeSat at one time before the ACS is activated. | Attempting to successfully downlink once | Off | Off |
| Low Power Alive Signal | This is the power saving version of Alive Signal. | Attempting to successfully downlink once | Off | Off |
Stabilization phase exit conditions:
- IMU values determine that the CubeSat is stable
- X minutes have elapsed in the Stabilization phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Detumble & Spin | This mode gives an opportunity for spin stabilization at the beginning of the mission. | Sleep mode | Detumble & Spin | On |
| Low Power Detumble & Spin | This is the power saving version of Detumble & Spin. | Sleep mode | Off | Off |
Standby phase exit conditions:
- Deployment command received
- X minutes have elapsed in the Standby phase
| Mode | Description | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|---|
| Normal | The CubeSat performs | Sleep mode | Pointing or Simple | On |
| Transmit | TODO | Downlink period of X minutes | Off | Off |
| Low Power | TODO | Downlink period of X minutes | Off | Off |
Deployment phase exit conditions:
- Armed command received
- X minutes have elapsed in the Deployment phase
| Mode | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|
| Deployment Normal | Sleep mode | Pointing or Simple | On |
| Deployment Transmit | Downlink period of X minutes | Off | Off |
| Deployment Low Power | Downlink period of X minutes | Off | Off |
Armed phase exit conditions:
- Fire command received
- X minutes have elapsed in the Armed phase
| Mode | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|
| Armed Normal | Sleep Mode | Pointing or Simple | On |
| Armed Transmit | Downlink period of X minutes | Off | Off |
| Armed Low Power | Downlink period of X minutes | Off | Off |
In Sun phase exit conditions:
- Temperature sensor readings are valid and the temperature determines the CubeSat is in sun
- Temperature sensor readings are invalid, current sensor readings are valid and current determines the CubeSat is in sun
- Temperature sensor readings are invalid and temperature sensor readings are invalid
- X minutes have elapsed in the Armed phase
| Mode | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|
| In Sun Normal | Sleep mode | Pointing or Simple | On |
| In Sun Transmit | Downlink period of X minutes | Off | Off |
| In Sun Low Power | Downlink period of X minutes | Off | Off |
| In Sun Voltage Sensor Fault | Downlink period of X minutes | Off | Off |
| Mode | RockBLOCK Status | ACS Mode | IMU Status |
|---|---|---|---|
| Turn on Camera | Sleep mode | Off | Off |
| Mandatory Burns | Sleep mode | Off | On |
| Regular Burns | Sleep mode | Off | On |
| Take Photo | Sleep mode | Off | On |
Fix diagram to show transitions between each version of each mode rather than default mode
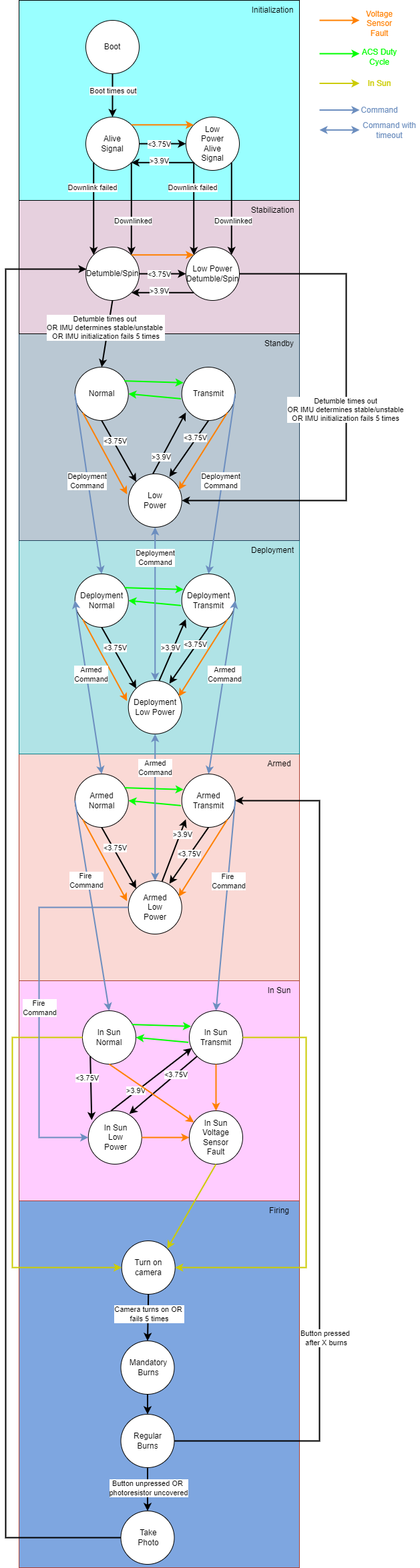
The transition from Mandatory Burns to Regular Burns is when the burn cycle has been completed X times.
-
Should alive signal allow for multiple RockBLOCK hard faults?
- Allow for 3 hard faults
-
Should IMU be on during boot?
- IMU off
-
How does the IMU determine the CubeSat is stable during Detumble & Spin?
- Good : gyro z > 1 rad/s && gyro x and gyro y are below 0.2 rad/s
- So Bad : x gyro or y gyro are greater than 0.7 rad/s
-
What are all of the downlink period/timeouts?
- detumble & spin timeout after 30 minutes
-
How do timeouts for phases work?
- if armed times out go back to deployment mode
-
If IMU is in invalid state in detumble and spin do we just keep attempting reinitialization until the phase times out? How does that work with the power budget
- retry imu initialization 5 times and then exit
- times out
- gyro values discussed
-
Should we always ignore the photoresistor?
- button OR photoresistor- neither has precedence
-
If temperature sensor readings are invalid and current sensor readings are invalid should we really proceed straight from in sun?
- we would know in armed if they were invalid so we know that we are overriding them
-
transition from pointing to simple
- x gyro or y gyro are greater than 0.2 rad/s
-
no timeout for deployment phase
-
stay in armed for 48 hours