-
Shader-based programmable pipeline
-
Perspective-Correct Interpolation
-
Culling/Clipping
- Sutherland-Hodgeman Clipping
- Switchable Back/Front-Face Culling
-
[x]
-
Shader:
- Phong
- Blinn–Phong
- PBR
- Gouraud
- Flat
-
Tangent Space Normal Mapping
-
Shadow
- PCF
- PCSS
-
AO
- SSAO
- HBAO
-
PBR(Metallic-Roughness Workflow)
-
Cubemap and Skybox
-
IBL
- Diffuse IBL
- Specular IBL
| Blinn-Phong | PBR + IBL |
|---|---|
 |
 |
- 规定$CenterLocation - CameraLocation$ 作为向量规定为摄像机坐标系下z轴的正方向,即离摄像机越远的z值越大。
- 右手坐标系
- 注意当模型变换矩阵矩阵为$M$时,发现变换矩阵为$(M^{-1})^{T}$, 推导如下:
假设模型变换矩阵$M$,$\Delta ABC$的法线向量$n$,$\Delta ABC$上的任意点为$P1$和$P2,P1$和$P2$构成向量$P1-P2$, 满足$n^T(P1-P2)=0$。这里设$n$为列向量,$P1-P2$为列向量。
即$(n^TM^{-1})[M(P1-P2)]=0$,因此新的法向量应为$(n^TM^{-1})^T=(M^{-1})^Tn$
| Before | After |
|---|---|
 |
 |
原因在于:用屏幕坐标插值这个行为是错误的
我们希望计算出,当屏幕空间上的插值比例为$\frac{m}{1-m}$时在世界空间中他们之间的真正比例是多少,我们设其为$\frac{n}{1-n}$,尝试计算$n$和$m$之间的关系:
考虑当插值时:
推广到3维:
实现:
static Vec3f PerspectiveCorrectInterpolation(const std::vector<Vec4f> &HomogeneousCoord, Vec3f LinearInterpBaryCoord) {
Vec3f CorrectBaryCoord;
for (int i = 0; i < 3; i++)
{
CorrectBaryCoord.raw[i] = LinearInterpBaryCoord.raw[i] / HomogeneousCoord[i].w;
}
float Z_n = 1.0f / (CorrectBaryCoord.x + CorrectBaryCoord.y + CorrectBaryCoord.z);
CorrectBaryCoord *= Z_n;
return CorrectBaryCoord;
};- 视锥剔除:AABB Box 和 View AABB 无相交则不渲染
- 背面剔除: 三角形法线方向和相机观察方向夹角小于90°(即$cos(\theta)>0$)则不进行渲染
实现:
for(int i=0;i<model->nfaces();i++)
{
const std::vector<int>& face = model->getface(i);
Vec3f WorldCoords[3];
for(int j=0;j<3;j++)
{
WorldCoords[j] = model->getvert(i, j);
}
Vec3f ScreenCoords[3];
for(int j=0;j<3;j++)
{
auto Mat4x1_Vertex = Shader->vertex(i, j);
ScreenCoords[j] = {Mat4x1_Vertex.raw[0][0], Mat4x1_Vertex.raw[1][0], Mat4x1_Vertex.raw[2][0]};
}
Vec3f tri_normal = (WorldCoords[2]-WorldCoords[0])^(WorldCoords[1]-WorldCoords[0]);
if(tri_normal.normlize() * (WorldCoords[0] - Eye) >= 0) //back face culling
{
triangle(model,ScreenCoords, image2,ZBuffer,Shader);
}
}当一个物体跨越Viewport时,不进行裁剪会出现很多错乱现象,本人在渲染天空盒时出现了很多错误现象,再进行裁切后正常
Suherland-Hodeman多边形裁剪算法,依次对六个面进行裁剪即可。
static std::vector<VertexOut> SutherlandHodmanClip(const std::vector<VertexOut>& InVertex)
{
bool AllVertexInsideOfCVV = std::all_of(InVertex.begin(), InVertex.end(), [](const VertexOut& In){
return std::abs(In.ClipSpaceCoord.x) <= std::abs(In.ClipSpaceCoord.w)
&& std::abs(In.ClipSpaceCoord.y) <= std::abs(In.ClipSpaceCoord.w)
&& std::abs(In.ClipSpaceCoord.z) <= std::abs(In.ClipSpaceCoord.w);}
);
constexpr float EPSILON = 1e-6;
auto Inside = [](const Vec4f& line, const Vec4f& p) -> bool
{
float d = line.x * p.x + line.y * p.y + line.z * p.z + line.w * p.w;
return d > -EPSILON;
};
auto Intersect = [](const VertexOut& v1, const VertexOut& v2, const Vec4f& line) -> VertexOut
{
float da = v1.ClipSpaceCoord.x * line.x + v1.ClipSpaceCoord.y * line.y + v1.ClipSpaceCoord.z *line.z + v1.ClipSpaceCoord.w * line.w;
float db = v2.ClipSpaceCoord.x * line.x + v2.ClipSpaceCoord.y * line.y + v2.ClipSpaceCoord.z *line.z + v2.ClipSpaceCoord.w * line.w;
float weight = da / (da - db);
return v1 + (v2 - v1) * weight;
};
const std::vector<Vec4f> ViewPlanes = {
//Near
Vec4f(0,0,1,1),
//far
Vec4f(0,0,-1,1),
//left
Vec4f(1,0,0,1),
//top
Vec4f(0,1,0,1),
//right
Vec4f(-1,0,0,1),
//bottom
Vec4f(0,-1,0,1)
};
if(AllVertexInsideOfCVV) return InVertex;
std::vector<VertexOut> OutVertex{InVertex[0], InVertex[1], InVertex[2]};
for(const auto& ViewPlane : ViewPlanes)
{
std::vector<VertexOut> input(OutVertex);
OutVertex.clear();
for(int j = 0; j < input.size(); j++)
{
VertexOut current = input[j];
VertexOut last = input[(j + input.size() - 1) % input.size()];
if (Inside(ViewPlane, current.ClipSpaceCoord))
{
if(!Inside(ViewPlane, last.ClipSpaceCoord))
{
VertexOut intersecting = Intersect(last, current, ViewPlane);
OutVertex.push_back(intersecting);
}
OutVertex.push_back(current);
}
else if(Inside(ViewPlane, last.ClipSpaceCoord))
{
VertexOut intersecting = Intersect(last, current, ViewPlane);
OutVertex.push_back(intersecting);
}
}
}
return OutVertex;
}存储在模型顶点的**切线空间(tangent space)**中,优势:
- 切线空间存储的是相对法线信息,因此换个网格(或者网格变换deforming)应用该纹理,也能得到合理的结果。
- 可以进行uv动画,通过移动该纹理的uv坐标实现凹凸移动的效果,这种UV动画在水或者火山熔岩这种类型的物体会会用到。
- 重用法线纹理节省内存,比如,一个砖块,我们仅使用一张法线纹理就可以用到所有的6个面,无需对每个面有一个发现贴图,这样大大减少了法线贴图的大小。
- 可以压缩。因为切线空间的法线z方向总是正方向,因此可以仅存储xy方向,从而推导z方向(存储的法线向量是单位向量,用勾股定理由xy得出z,取z为正的一个即可)。
项目wiki上的理解/公式推导: Summary of TagentSpaceNormal, TBN Matrix, TBN Coordinate
A very elegant fitting.
float3 ACESToneMapping(float3 color, float adapted_lum)
{
const float A = 2.51f;
const float B = 0.03f;
const float C = 2.43f;
const float D = 0.59f;
const float E = 0.14f;
color *= adapted_lum;
return (color * (A * color + B)) / (color * (C * color + D) + E);
}| With ACES ToneMapping | Without ACES ToneMapping |
|---|---|
 |
 |
这里我们可视化下Light视角下的DepthBuffer
| Depth Buffer(In Light View) |
|---|
 |
| With Shadow | Without Shadow |
|---|---|
 |
|
会出现的几个问题:
-
阴影失真与自遮挡(Shadow Acne)
-
阴影悬浮(Shadow Peter-panning)
-
阴影锯齿(Shadow Aliasing)
-
大场景中Shadow Map找不到对应的点(CSM)

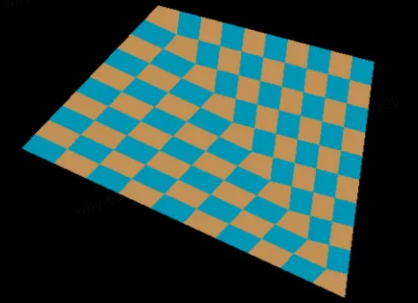
上图出现了条状的阴影:

以方向光源为例,一般认为方向光是平行光,在光源处渲染时使用正交投影。因为Shadow Map的分辨率有限,Shadow Map上面的**一个片段**对应场景中的**一块区域**,又因为很多情况下光源与物体存在夹角,因此记录的深度通常与物体的实际深度存在偏差。
上图中蓝色片段即为ShadowMap中记录的深度。在纹理中像素为最小单位,一个像素只能记录一个值,图中每个像素记录的是箭头处的深度。这就导致了明明本该整块被照亮的地板,会出现明暗相间的条纹:黑线处的地板由于在光源视角中深度小于记录的值,因此不在阴影中。红线处的地板深度大于记录的值,没有通过阴影测试。
解决办法有些许trick,我们可以用一个叫做阴影偏移(shadow bias)的技巧来解决这个问题,我们简单的对表面的深度(或深度贴图)应用一个偏移量,这样片元就不会被错误地认为在表面之下了。

float shadowFactor = 1.0f;
if((int)CorrespondingPoint.x < DepthBuffer.size() && (int)CorrespondingPoint.y < DepthBuffer[(int)CorrespondingPoint.x].size())
{
shadowFactor = 0.3f + 0.7f*(DepthBuffer[(int)CorrespondingPoint.x][(int)CorrespondingPoint.y] > CorrespondingPoint.z - 1);//1 is shadow bias
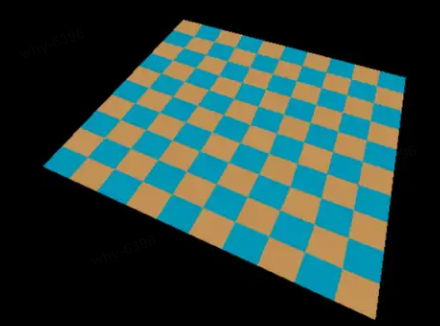
}我们这里简单的用了1作为bias, 阴影基本正常:

因为阴影失真的问题是由于光线和物体表面的夹角导致的,光线越垂直于物体,失真的影响就越小,因此通常会将bias与光线和物体表面法线的夹角挂钩:
//Shadow
Vec3f p(0, 0, 0);
for (int i=0;i<3;i++)//坐标插值
{
p = p + Varying_tri[i] * bar.raw[i];
}
Matrix<4, 1, float>CorrespondingPointInShadowBuffer = Uniform_MShadow * Matrix<4, 1, float>::Embed(p);
CorrespondingPointInShadowBuffer /= CorrespondingPointInShadowBuffer.raw[3][0];
Vec3f CorrespondingPoint{ CorrespondingPointInShadowBuffer.raw[0][0], CorrespondingPointInShadowBuffer.raw[1][0], CorrespondingPointInShadowBuffer.raw[2][0] };
float shadowFactor = 1.0f;
constexpr float shadowK = 1.0f;
float shadowBias = shadowK*(1.0f - n*l);
if ((int)CorrespondingPoint.x < DepthBuffer.size() && (int)CorrespondingPoint.y < DepthBuffer[(int)CorrespondingPoint.x].size())
{
shadowFactor = 0.3f + 0.7f*(DepthBuffer[(int)CorrespondingPoint.x][(int)CorrespondingPoint.y] > CorrespondingPoint.z - shadowBias);//1 is shadow bias
}这其实是由于ShdowBias导致的:

本来不能通过阴影测试,bias设置过大,导致本该被遮挡的物体,因为减去了bias导致深度值变小,通过了阴影测试。
解决方法:
1.其实bias设置合理一点即可,不要太大。
2.也可以当渲染深度贴图时候使用正面剔除(front face culling),我们只利用背面,这样阴影失真也解决了,不再需要bias的辅助。使用这个方法可以免去反复调整bias,并且也不会导致悬浮的问题。但使用该方法的前提是场景中的物体必须是一个体(有正面和反面)而非原先的一个面。
我们上述的阴影有的锯齿:

- 锯齿本质是采样频率不够,最直接的解决方法就是 提高采样频率,但也会带来时间/空间的开销
- 使用PCF/PCSS等各种效果更好的阴影算法
PCF全称是Percentage Closer Filtering,优化阴影测试时的采样方式,对一个ShadowMap上的点的周围3*3采样,相当于模糊处理,以节约阴影锯齿的问题。
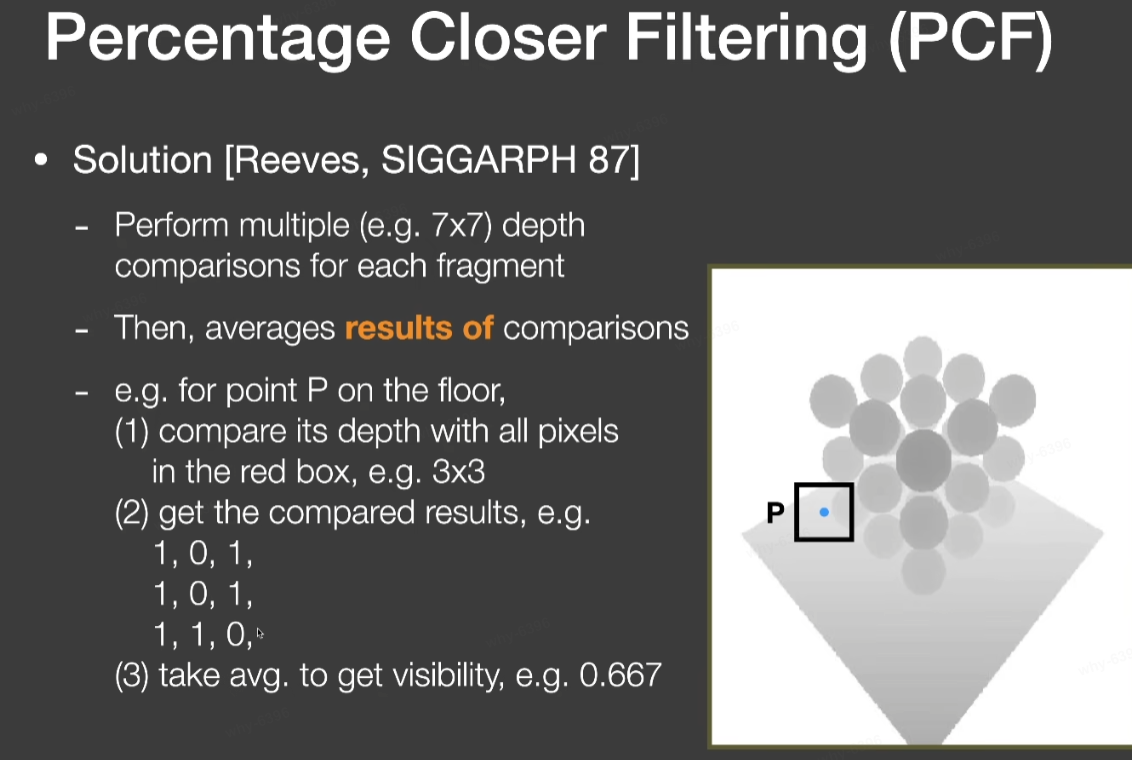
注意这里不是对shadowMap做模糊,而是如果有一点是ShadowMap对其周围泊松分布采样算出其被遮挡的比例作为阴影系数。

| Without PCF | With PCF |
|---|---|
 |
 |
PCF虽然“软化”了阴影,但是我们阴影往往是由硬阴影+软阴影组成,PCF这种全软化的方式算不上很好的效果。
现实中的阴影往往是如下图,沿着红线越来越“软”

PCSS就是动态适应的选择PCF模糊的size:

如上图,只需要遮挡处到光源处的竖直距离$d_{Blocker}$, 投射阴影处到光源处的竖直距离$d_{Receiver}$,还需要一个光源大小$W_{Light}$,

可以发现法线过度生硬,这是因为$d_{Blocker}$出现了突变,即我们计算average

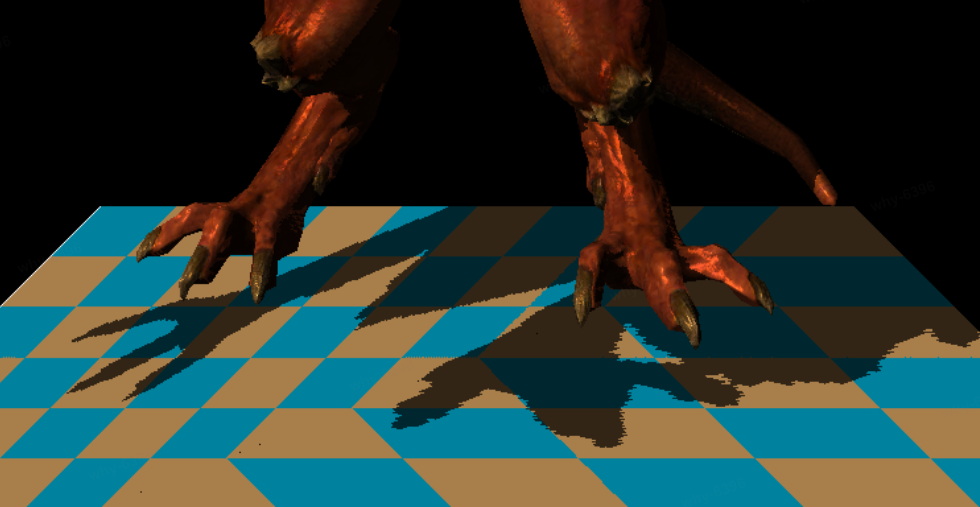
我们使用上述的两种软阴影方法PCF/PCSS中,不难发现因为做高斯模糊导致在脚趾处有一定的漏光,这是因为对于脚趾边缘的阴影点在计算时高斯模糊导致了边缘很软,解决漏光的方法也很直接,使用带权的高斯模糊,而不是权重相同,权重可以以两个点之间的世界空间距离的倒数作为权重,即两个点差距很大(一点在地板的阴影上,另一个点在脚趾上),这个点的权重贡献会很小。
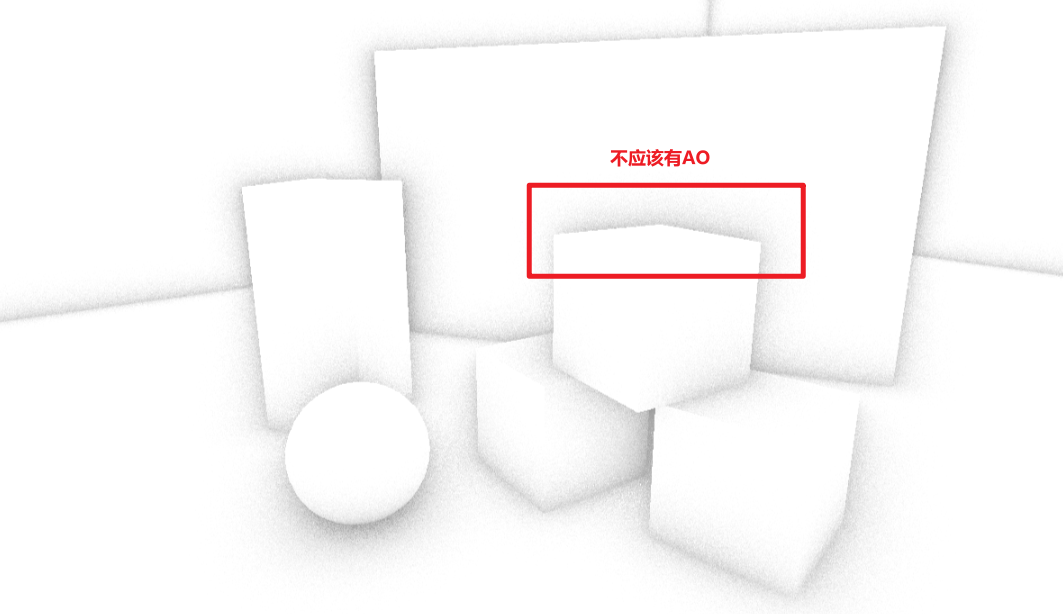
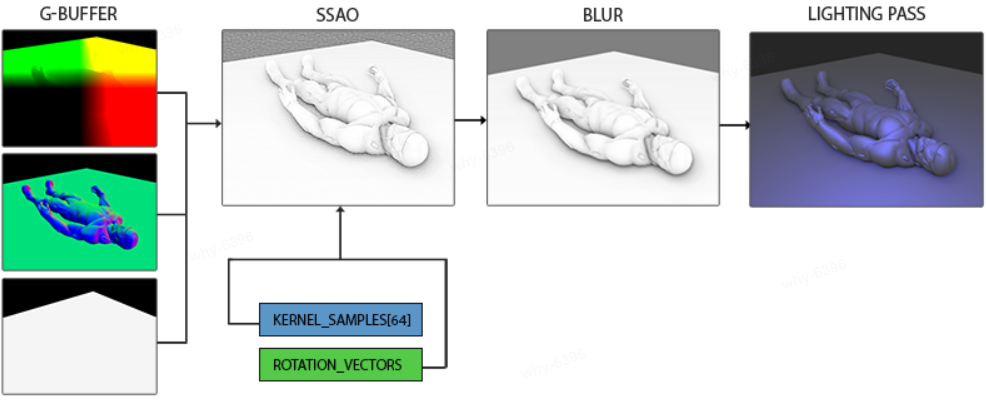
实现的几个细节:
-
物体相差远的地方, 会在深度图上误认为有AO,实际上不应该有AO,所以要做RangeCheck
-
降噪: 双边滤波
-
降采样提升运行效率
-
法向半球采样 + 加速插值函数(将核心样本靠近原点分布)
工作流:
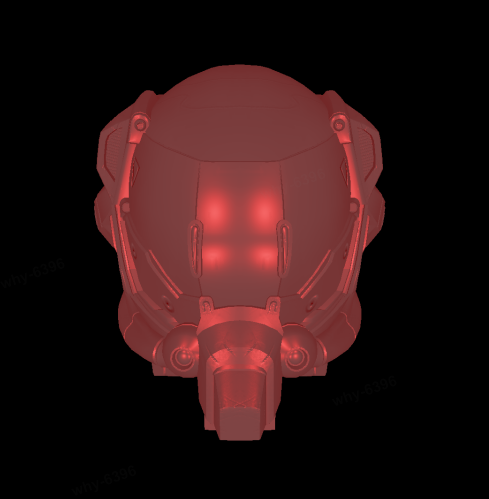
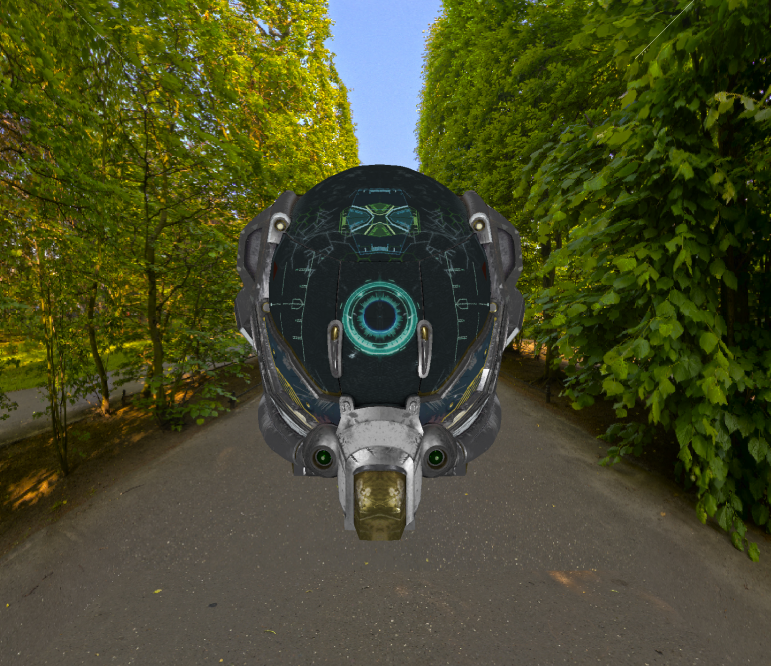
最后效果:

HBAO
| With HBAO | Without HBAO |
|---|---|
 |
 |
工作流是:
- 降低分辨率
- 对每个随机方向进行RayMarching找最大水平角
- 做Blur
HBAO(屏幕空间的环境光遮蔽) - YiQiuuu的文章 - 知乎 https://zhuanlan.zhihu.com/p/103683536
Metallic-Roughness Workflow:
四个点光源下渲染结果:

| Without Diffuse IBL | With Diffuse IBL |
|---|---|
 |
 |
渲染方程为:
我们只考虑第一项漫反射项:
这项可以预处理,其中我们认为p总在中心点,然后对每个法向$n$进行radiance采样合成irradiance即可,进行预计算即可。
采样时获取对应预计算贴图处的信息即可,预计算贴图为:
| Without Specular IBL | With Speular IBL |
|---|---|
 |
 |
渲染方程在镜面项式子如下:
做Split Sum得到:
首先考虑第一部分:
这部分和漫反射部分有些区别是,考虑N项决定了高光的波瓣lobe,这部分需要对不同粗糙度进行区别。

我们这里为了更快的收敛速度使用重要性采样,也就是我们设计一个新的pdf来指导采样,推导如下:
我们设发现分布函数为$D(\theta)$:
在设计新的概率分布函数时,我们所期待的是:让$D(\theta)$更大的,即更接近lobe的贡献更大,因此我们设计PDF是要向$D(\theta)$靠拢, 我们这样设计PDF:
这个PDF的另一个好处就是其还是normalized的,证明如下:
我们计算CDF:

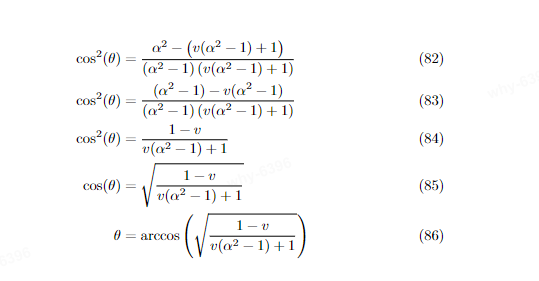
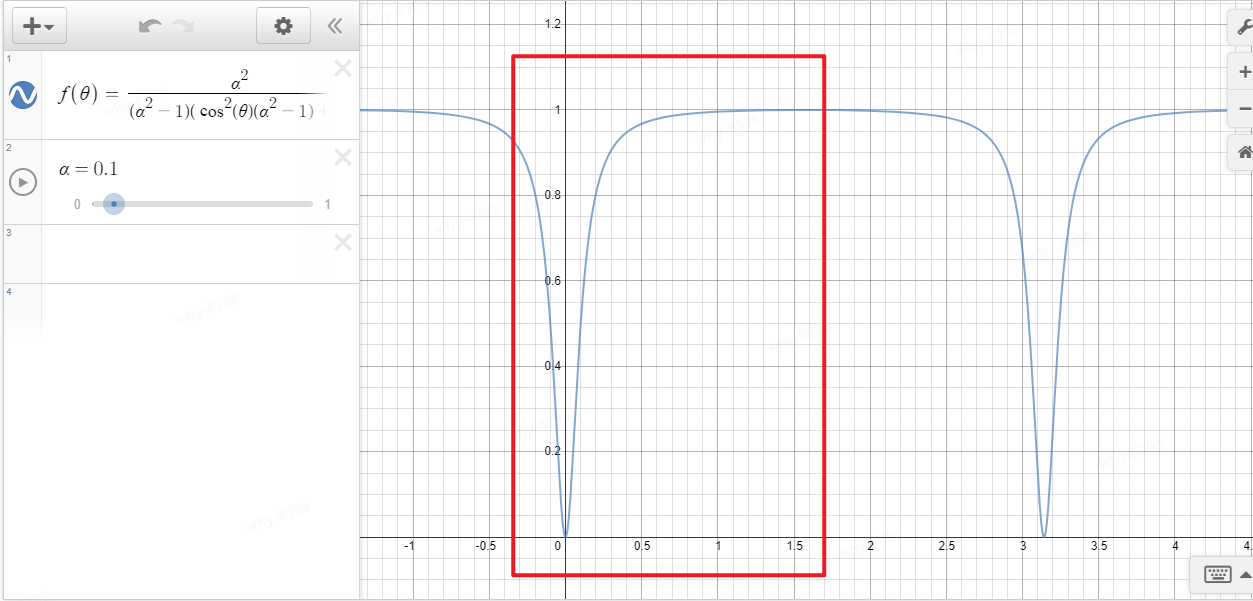
我们看下对于v变量和$\theta$的关系: 当粗糙度很低(0.1)时, 当随机选择v(竖轴)时,总会在$\theta$很小处,即此时采样主要在lobe处。
u,v就是我们新的分布,我们可以直接对u,v应用uniform分布,但是为了加速收敛,选择低差异序列,传统蒙特卡洛方法使用伪随机数生成样本点,这些点在高维空间中可能会出现聚集或空隙现象,从而导致估计不稳定。拟蒙特卡洛方法使用确定性的低差异序列(如Sobol序列、Halton序列等)生成样本点,这些点在高维空间中分布更加均匀,减少了空隙和重叠的现象,提高了估计的稳定性。
最后预处理得到不同粗糙度下的预滤波环境贴图:

天空盒的做法十分简单,即渲染六个包围面
Multi Objects Render Pipeline is supported.
-
Z-fighting https://en.wikipedia.org/wiki/Z-fighting
-
DirectX -改进阴影深度映射的常见技术 https://learn.microsoft.com/zh-cn/windows/win32/dxtecharts/common-techniques-to-improve-shadow-depth-maps?redirectedfrom=MSDN
-
图形学 - 关于透视矫正插值那些事 - Shawoxo的文章 - 知乎 https://zhuanlan.zhihu.com/p/403259571
-
计算机图形学六:透视矫正插值和图形渲染管线总结 - 孙小磊的文章 - 知乎 https://zhuanlan.zhihu.com/p/144331875
-
如何写一个软渲染(4)-Clipping - 拳四郎的文章 - 知乎 https://zhuanlan.zhihu.com/p/43586784
-
Unity SRP 实战(三)PCSS 软阴影与性能优化 - AKG4e3的文章 - 知乎https://zhuanlan.zhihu.com/p/462371147
-
实时阴影(一) ShadowMap, PCF与Face Culling - 陈陈的文章 - 知乎 https://zhuanlan.zhihu.com/p/477330771
-
实时阴影(三) VSM与VSSM - 陈陈的文章 - 知乎 https://zhuanlan.zhihu.com/p/483674565
-
AO的概念理解 https://mentalraytips.blogspot.com/2008/11/joy-of-little-ambience.html
-
https://learnopengl-cn.readthedocs.io/zh/latest/05%20Advanced%20Lighting/09%20SSAO/
-
http://john-chapman-graphics.blogspot.com/2013/01/ssao-tutorial.html
-
游戏后期特效第四发 -- 屏幕空间环境光遮蔽(SSAO) - 音速键盘猫的文章 - 知乎 https://zhuanlan.zhihu.com/p/25038820