This repository has been tested on Python 3.10 and CUDA 12.8. We recommend using conda to create an isolated environment.
conda create -y -n internvla_a1 python=3.10
conda activate internvla_a1
pip install --upgrade pipWe use FFmpeg for video encoding/decoding and SVT-AV1 for efficient storage.
conda install -c conda-forge ffmpeg=7.1.1 svt-av1 -ypip install torch==2.7.1 torchvision==0.22.1 torchaudio==2.7.1 \
--index-url https://download.pytorch.org/whl/cu128pip install torchcodec numpy scipy transformers==4.57.1 mediapy loguru pytest omegaconf
pip install -e .We replace the default implementations of several model modules (e.g., π0, InternVLA_A1_3B, InternVLA_A1_2B) to support custom architectures for robot learning.
TRANSFORMERS_DIR=${CONDA_PREFIX}/lib/python3.10/site-packages/transformers/
cp -r src/lerobot/policies/pi0/transformers_replace/models ${TRANSFORMERS_DIR}
cp -r src/lerobot/policies/InternVLA_A1_3B/transformers_replace/models ${TRANSFORMERS_DIR}
cp -r src/lerobot/policies/InternVLA_A1_2B/transformers_replace/models ${TRANSFORMERS_DIR}Make sure the target directory exists—otherwise create it manually.
export HF_TOKEN=your_token # for downloading hf models, tokenizers, or processors
export HF_HOME=path_to_huggingface # default: ~/.cache/huggingfaceln -s ${HF_HOME}/lerobot dataThis allows the repo to access datasets via ./data/.
This section provides a minimal end-to-end example for running InternVLA-A1: download a dataset → convert it to v3.0 format → fine-tune InternVLA-A1-3B on the A2D Pick-Pen task.
In this example, we use the A2D Pick-Pen task from the Genie-1 real-robot dataset.
hf download \
InternRobotics/InternData-A1 \
real/genie1/Put_the_pen_from_the_table_into_the_pen_holder.tar.gz \
--repo-type dataset \
--local-dir dataExtract the downloaded archive, clean up intermediate files, and rename the dataset to follow the A2D naming convention:
tar -xzf data/real/genie1/Put_the_pen_from_the_table_into_the_pen_holder.tar.gz -C data
rm -rf data/real
mkdir -p data/v21
mv data/set_0 data/v21/a2d_pick_penAfter this step, the dataset directory structure should be:
data/
└── v21/
└── a2d_pick_pen/
├── data/
├── meta/
└── videos/
The original dataset is stored in LeRobot v2.1 format. This project requires LeRobot v3.0, so a format conversion is required.
Run the following command to convert the dataset:
python src/lerobot/datasets/v30/convert_my_dataset_v21_to_v30.py \
--old-repo-id v21/a2d_pick_pen \
--new-repo-id v30/a2d_pick_penAfter conversion, the dataset will be available at:
data/v30/a2d_pick_pen/
This project fine-tunes policies using relative (delta) actions. Therefore, you must compute per-dataset normalization statistics (e.g., mean/std) for the action stream before training.
Run the following command to compute statistics for v30/a2d_pick_pen:
python util_scripts/compute_norm_stats_single.py \
--action_mode delta \
--chunk_size 50 \
--repo_id v30/a2d_pick_penThis script will write a stats.json file under ${HF_HOME}/lerobot/stats/delta/v30/a2d_pick_pen/stats.json.
bash launch/internvla_a1_3b_finetune.sh v30/a2d_pick_penBefore running launch/internvla_a1_3b_finetune.sh, make sure to replace the environment variables inside the script with your own settings, including but not limited to:
HF_HOMEWANDB_API_KEYCONDA_ROOT- CUDA / GPU-related environment variables
- Paths to your local dataset and output directories
- Release InternVLA-A1-3B
- Release InternVLA-A1-2B
- Release guideline of large-scale dataset pretraining
All the code within this repo are under CC BY-NC-SA 4.0. Please consider citing our project if it helps your research.
@article{contributors2026internvla_a1,
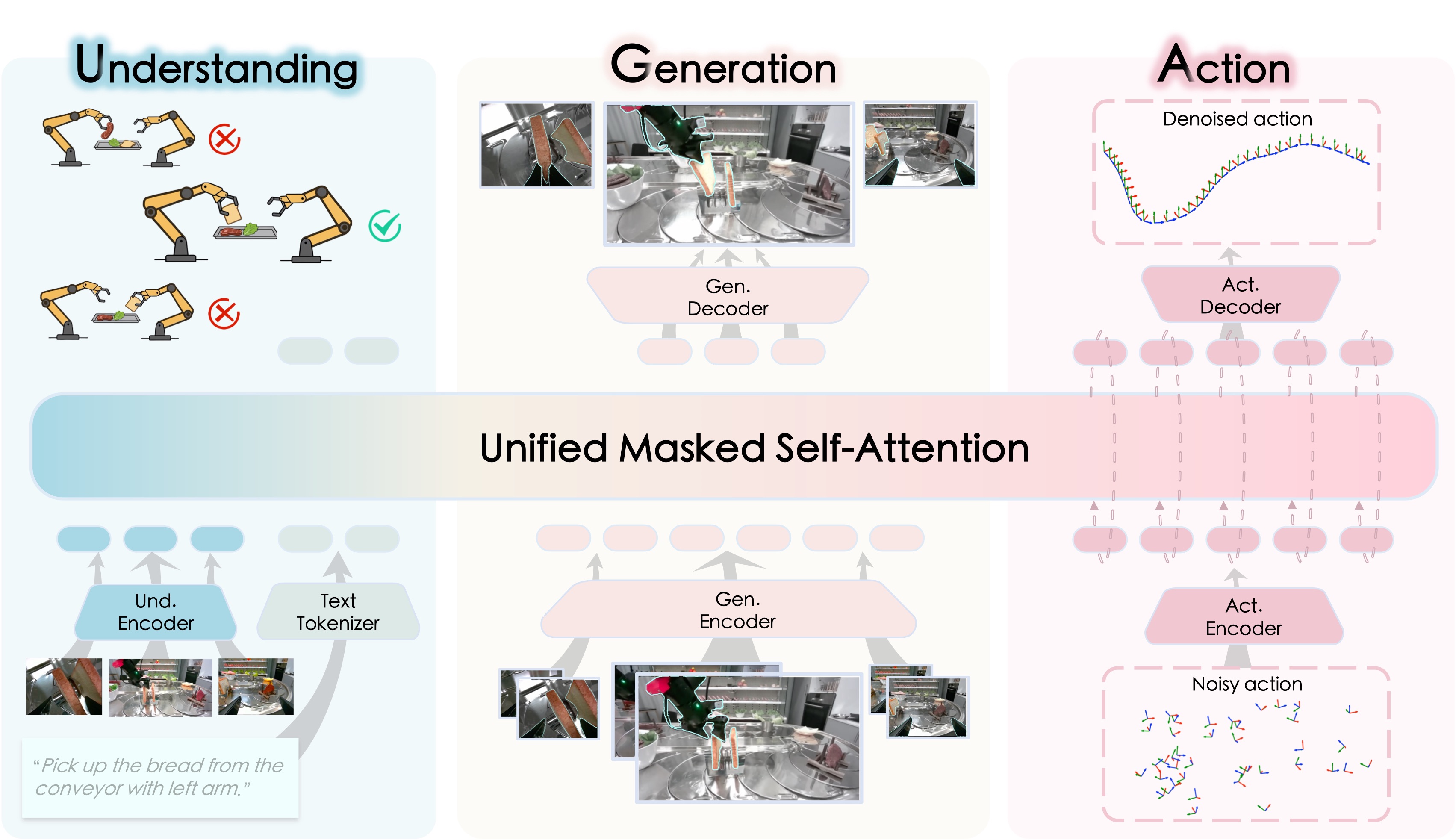
title={InternVLA-A1: Unifying Understanding, Generation and Action for Robotic Manipulation},
author={InternVLA-A1 contributors},
journal={arXiv preprint arXiv:2601.02456},
year={2026}
}