e0 - Eye-on-Hand Calibration (Successful) #3
Description
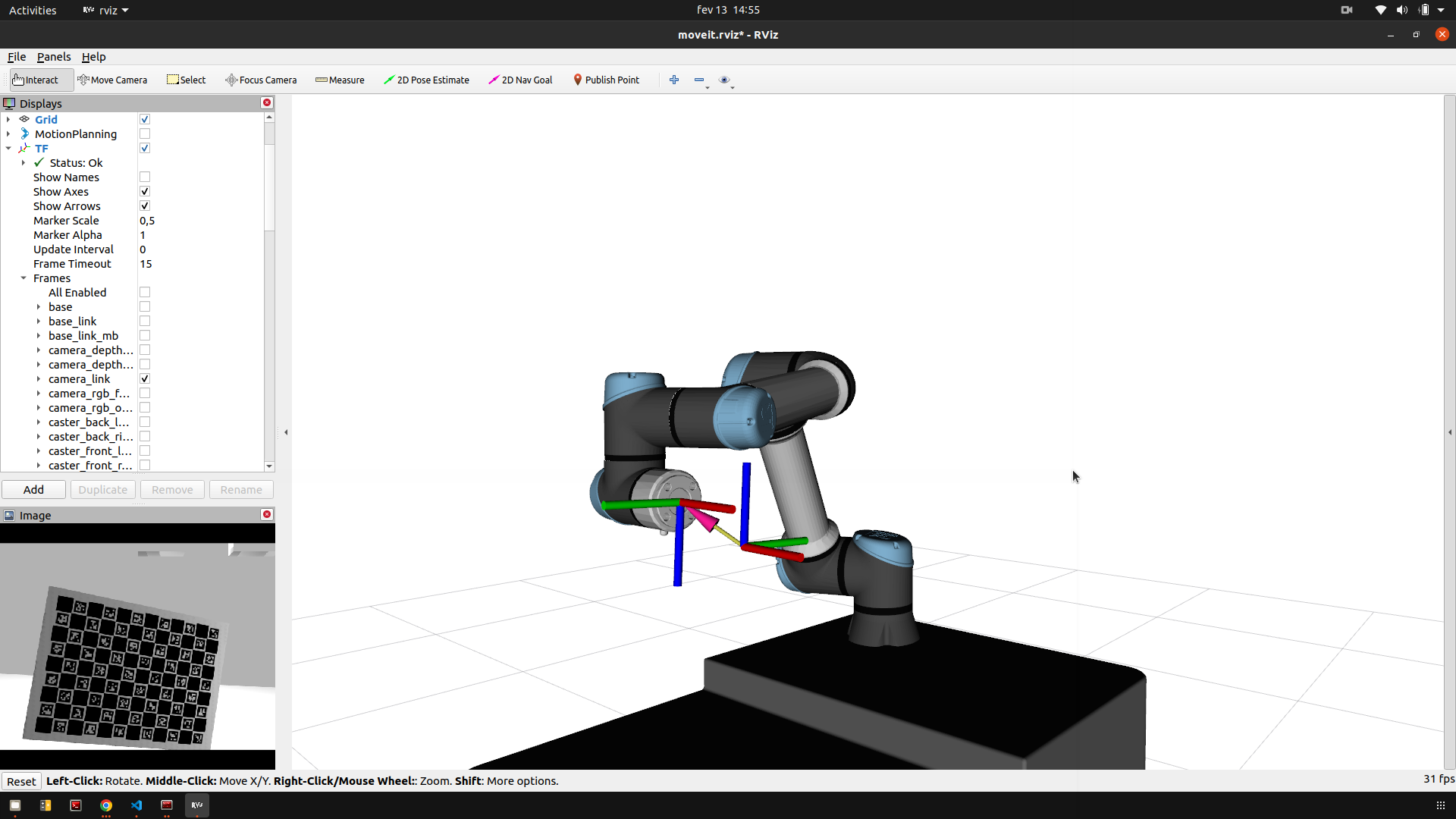
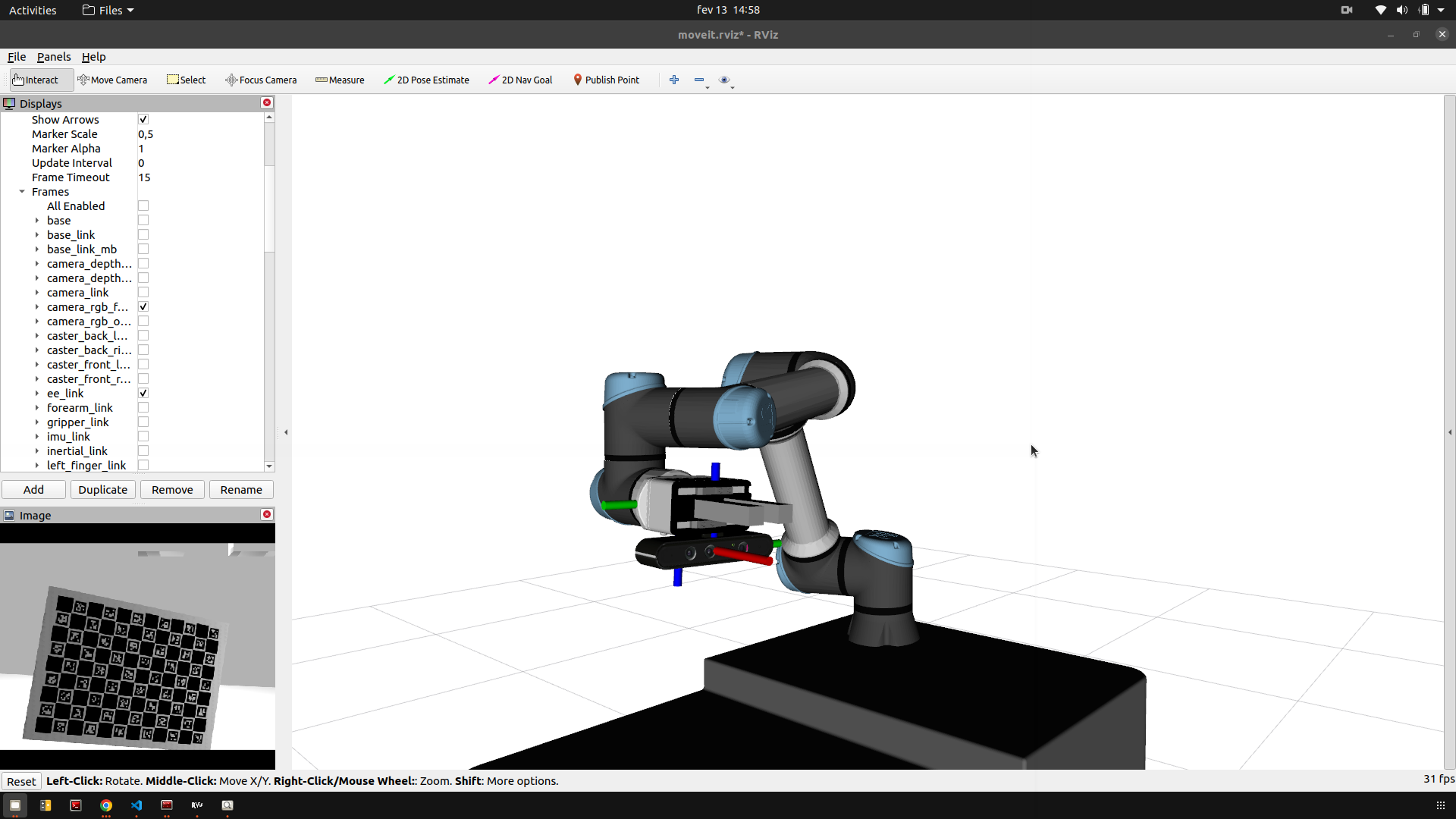
Calibration of an RGB astra camera mounted on the end-effector of the manipulator. (Successful)
https://github.com/JorgeFernandes-Git/zau_bot/tree/main/e0_rgb2ee
Summary:
- Using ATOM framework to perform eye-on-hand calibration.
- Eye-on-hand is a calibration problem that aims to determine the transformastion between a camera and a end-effetor.
- The camera used was a depth astra.
- The calibration used a total of 15 collections.
- The output is a URDF file with the optimized pose of the camera related to the end-effector.
Launch optimized URDF mobile manipulator (AGV connected to world, it will not move):
roslaunch e0_rgb2ee_optimized e0_rgb2ee_optimized.launch
Evaluate two datasets:
rosrun atom_evaluation cross_collection_rgb_to_rgb_evaluation -train_json ~/datasets/e0_rgb2ee_v2/atom_calibration.json -test_json ~/datasets/e0_rgb2ee/dataset.json -ss camera -st camera -si -wf world
Evaluation procedure: https://youtu.be/7iKA81g-aNs
Evaluation Results: https://github.com/JorgeFernandes-Git/zau_bot/blob/main/e0_rgb2ee/results.md
Calibration Results per collection:
| Collection | Camera (px) |
|---|---|
| 000 | 0.2187 |
| 001 | 0.1825 |
| 002 | 0.2116 |
| 003 | 0.2547 |
| 004 | 0.1240 |
| 005 | 0.1246 |
| 006 | 0.1971 |
| 007 | 0.1359 |
| 008 | 0.1217 |
| 009 | 0.1233 |
| 010 | 0.1738 |
| 011 | 0.1166 |
| 012 | 0.2856 |
| 013 | 0.1688 |
| 014 | 0.3206 |
| 015 | 0.2657 |
| Averages | 0.1891 |
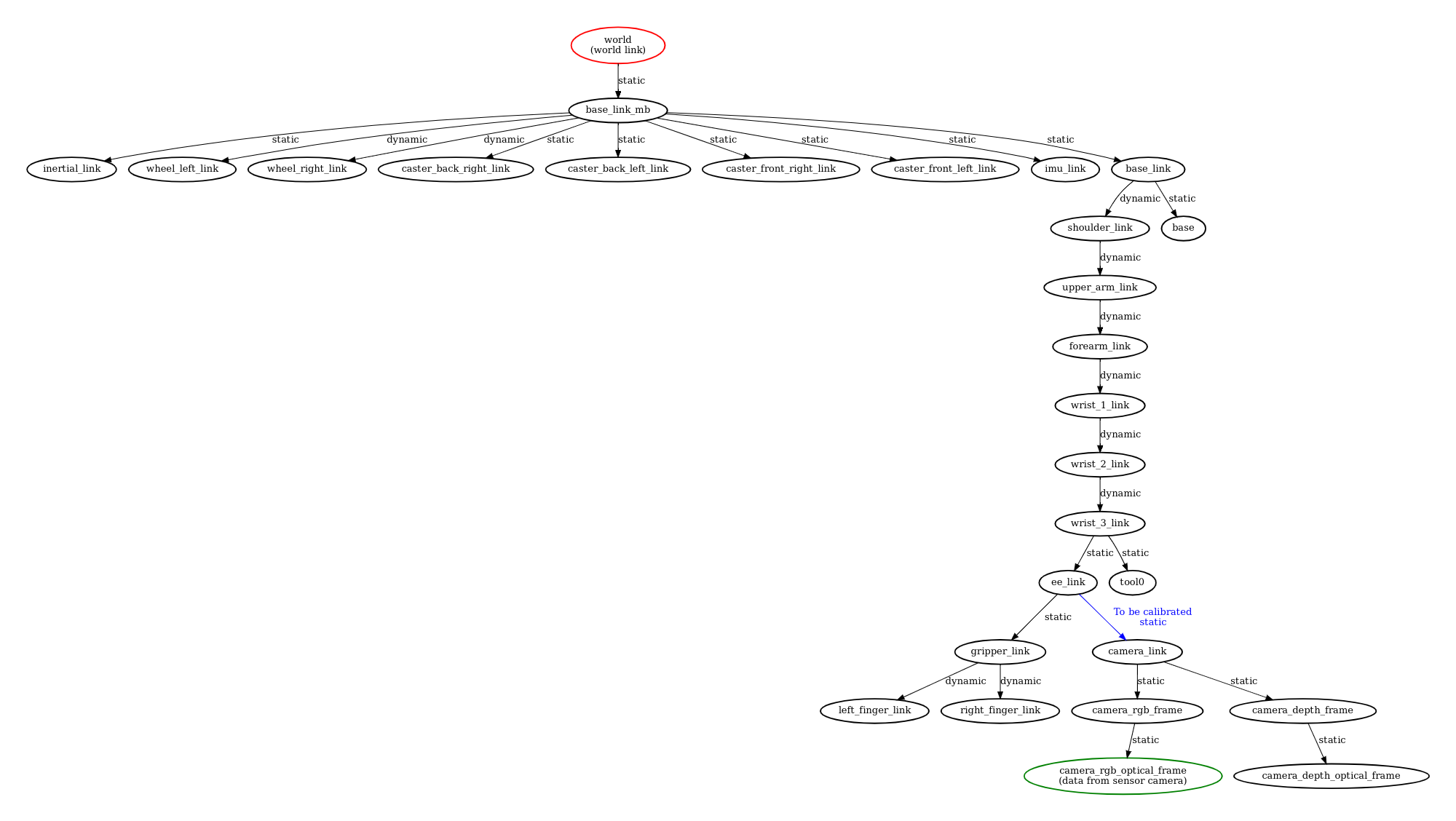
Calibration tree and Transformation RGB to End-Effector:
Videos:
Record bag file: https://youtu.be/mwAtXrQm8c4
Data collection: https://youtu.be/W_WFggovr9w
Run calibration: https://youtu.be/PX7BX9yNxMc
Evaluation procedure: https://youtu.be/7iKA81g-aNs
Commands:
Record bag file:
roslaunch e0_rgb2ee_record_bag record_sensor_data.launch
Run script for move the manipulator:
rosrun zau_bot_bringup execute_trajectories
Play dataset:
roslaunch e0_rgb2ee_calibration dataset_playback.launch
rosrun atom_calibration dataset_playback -json /home/jorge/datasets/e0_rgb2ee/dataset.json -ow
rosrun atom_calibration dataset_playback -json /home/jorge/datasets/e0_rgb2ee_v2/dataset.json -ow
Run calibration:
roslaunch e0_rgb2ee_calibration calibrate.launch
rosrun atom_calibration calibrate -json $ATOM_DATASETS/e0_rgb2ee_v2/dataset.json -v -rv -si -vo