(1) Robot Arm for part position detection ROS 18.04 Melodic + rviz + gazebo + URDF(generated from Solidworks 2016).
Controlling codes are written in Python 2. The video is just a simple process of detection. https://syncandshare.lrz.de/getlink/fi3mCooBeoVcjmoGBHf2bE/Video%20of%20the%20process.mp4
(2) Bachelor thesis
ROS 18.04 Melodic + rviz + gazebo + URDF(generated by Solidworks 2016) + moveit + elfin_robot pkg + velodyne + hdl.
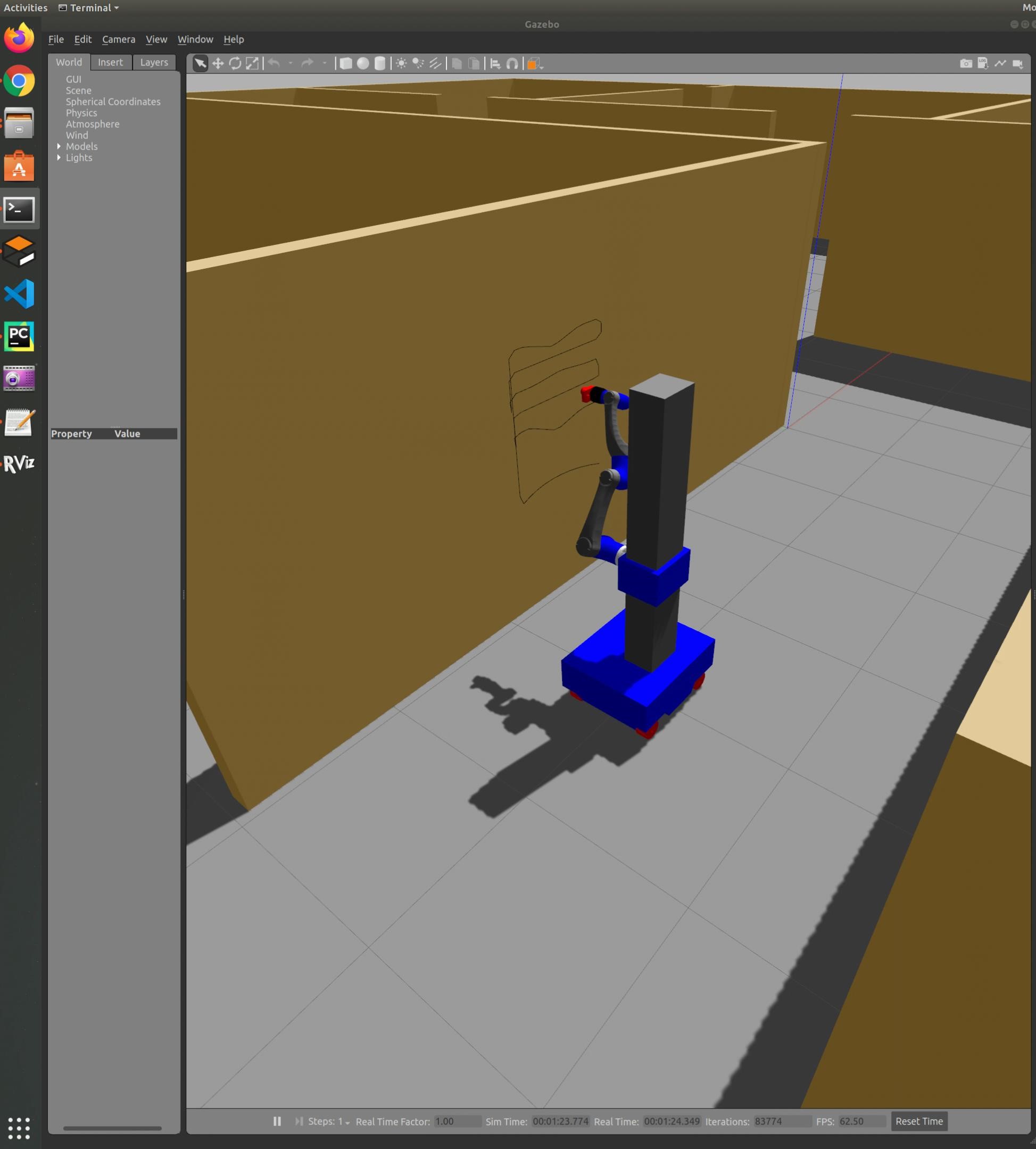
(a) robot arm painting controlled by ros and moveit
(b) map generation using hdl slam algorithmus pkg and velodyne.
elfin_robot: https://github.com/hans-robot/elfin_robot
hdl: https://github.com/analogdevicesinc/hdl
velodyne: https://github.com/lmark1/velodyne_simulator
Controlling codes are written in Python 2. Link including video, rosbagsfor hdl and rospkgs of the project. https://syncandshare.lrz.de/getlink/fi6SsGariETFCTvdHCwm2U/ Link of test on real robot arm: https://syncandshare.lrz.de/getlink/fiHmXPJ2cfuMmQff2hYCBv/6Test%20of%20painting%20on%20the%20wall.mp4
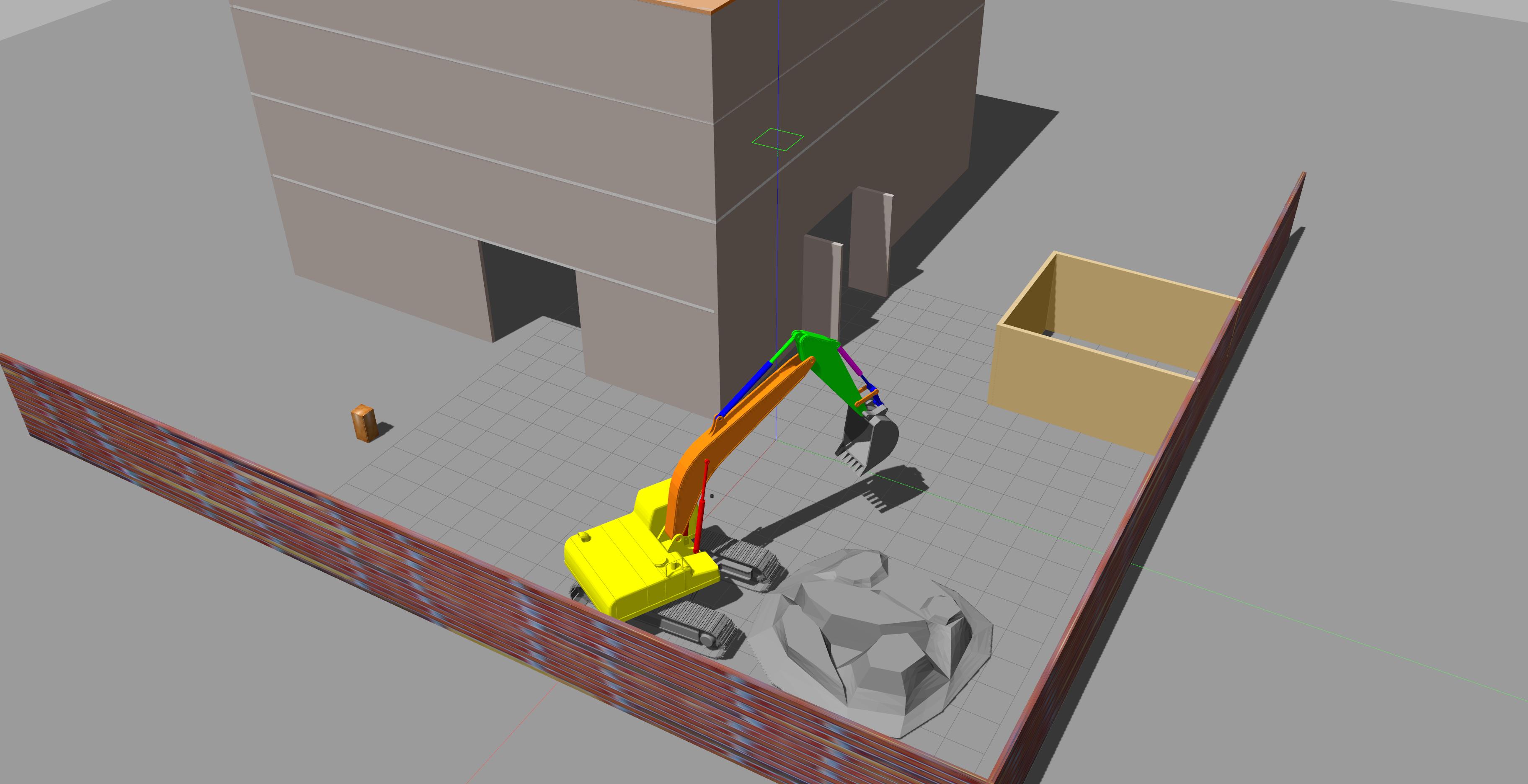
(3) Excavator simulation
ROS 18.04 Melodic + rviz + gazebo + URDF(generated by Solidworks 2016) + moveit + velodyne + hdl.
Link of video: https://syncandshare.lrz.de/getlink/fiQyxDVkdh57vJUpNMYCJr/%E6%88%90%E5%93%81%E5%B1%95%E7%A4%BA%E8%A7%86%E9%A2%91.mp4
Link of whole project: https://syncandshare.lrz.de/getlink/fi7oPmwBokvbyph7gczmGd/0_%E6%B5%A6%E4%B8%9C%E9%A1%B9%E7%9B%AE2.0%E7%89%88melodic.zip
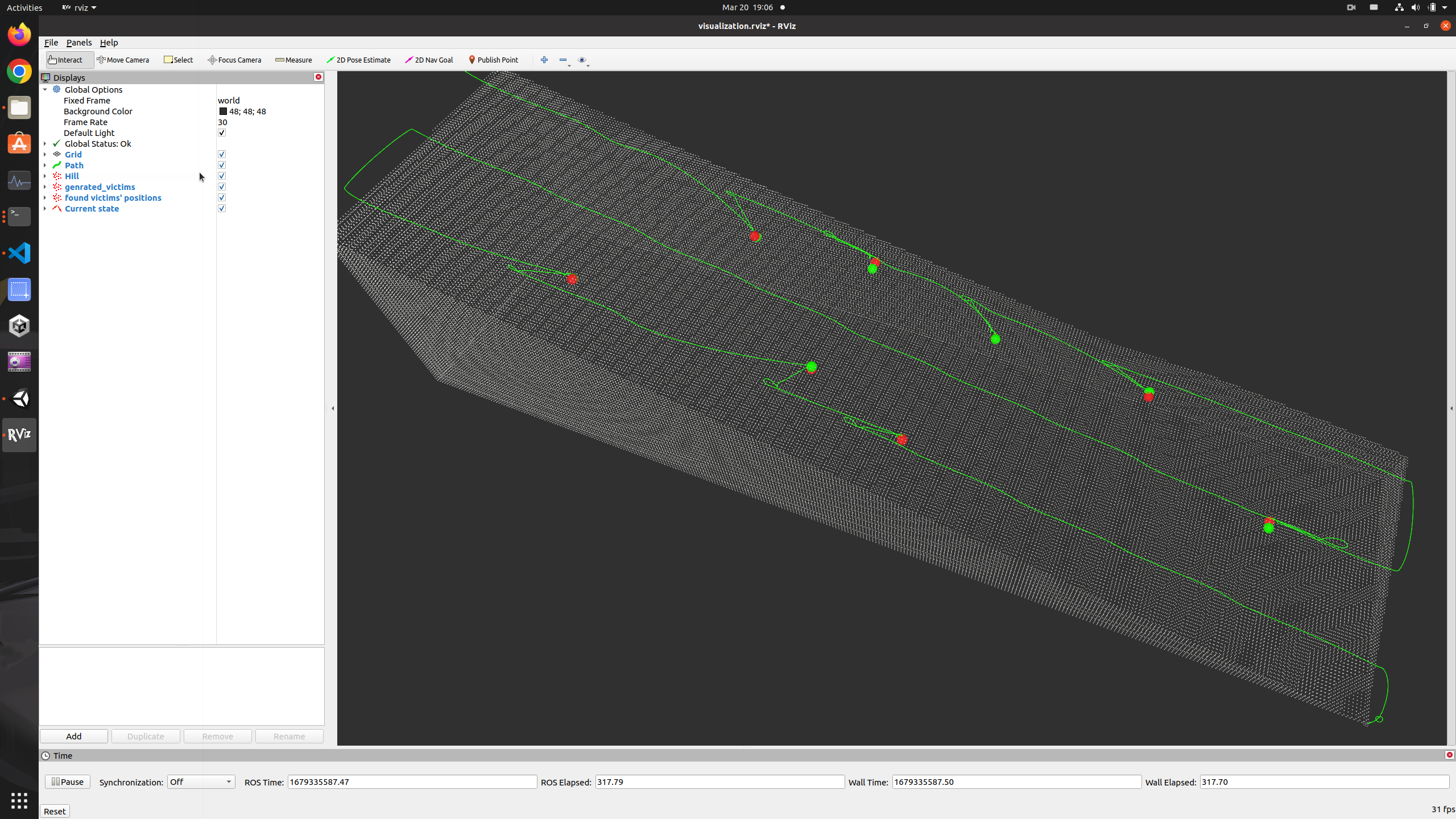
(4) Searching and rescure mission using UAV
ROS 20.04 Noetic + Rviz + Unity
Projects backup and videos are in: https://syncandshare.lrz.de/getlink/fi2z64EwiP78mRcGy3qFmD/