Real-World dataset at POSTECH.
The dataset is continuously being updated.
Download Link
You can find the description of the data in the description section.
Datasets were acquired using the CoCEL handheld.
- CoCEL Handheld Driver(Link)
- It is private now. It will open when a few remaining tasks are done.
- CoCEL Handheld DataRecorder(Link)
- Hardware Design
Left is AVIA version, Right is MID360 Version.
Designed by JunuHong


File names are formatted like this: acquisition_date_location_sequence_sensor_sync_info.bag
acquisition_date: Data acquisition date.location: Data acquisition location.sequence: Indicates the sequence type.sensor: Livox AVIA or MID-360. Camera and IMU are same setting.sync_info: Presence of sensor(LiDAR & Camera) synchronization.
On going...
Calibration data is available in the download link.
Camera intrinsic parameters were obtained using ros_camera_calibration.
Camera and LiDAR extrinsic parameters were obtained using livox_camera_calibration.
- Livox-Camera FOV Calculator : Livox LiDAR & Camera FOV Overlap Calculator.
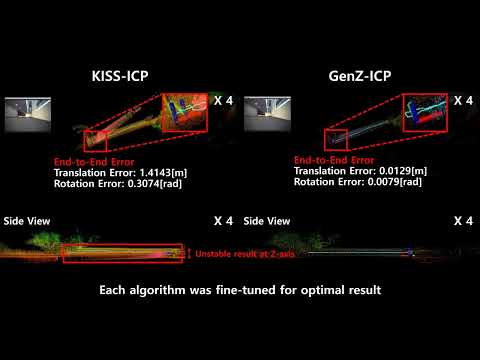
- End-to-End Error Evaluator : End-to-End pose error evaluator in
/scripts/end_to_end_error.py
If you use our datasets, please citation our dataset.
@misc{park2025dataset,
title={CoCEL Handheld Dataset},
author={Park, Sanghyun},
howpublished={\url{https://github.com/SanghyunPark01/CoCEL_Handheld-Dataset}},
year={2025}
}