In diesem Dokument halten wir die wichtigsten Erkenntnisse zur Explorativen Datenanalyse auf den gemessenen Sensordaten fest.
Der Beschleunigungssensor misst die Beschleunigung des Geräts auf allen Achsen (x,y,z). Im Smartphone hat er die Aufgabe, die derzeitige Lage des Geräts und ihre Veränderungen zu erkennen. Beim Drehen des Smartphones verändert sich die Richtung, aus der die Schwerkraft auf das Gerät wirkt.
Die Beschleunigung ist bei den Unterschiedlichen Aktivitäten erkennbar anders. Zusätzlich zeigt der y-Sensor (Entlang des Beins) interessante Muster, die sehr wahrscheinlich auf die Position des Handys in der vorderen Linken Hosentasche bei den Messungen zurückzuführen sind.
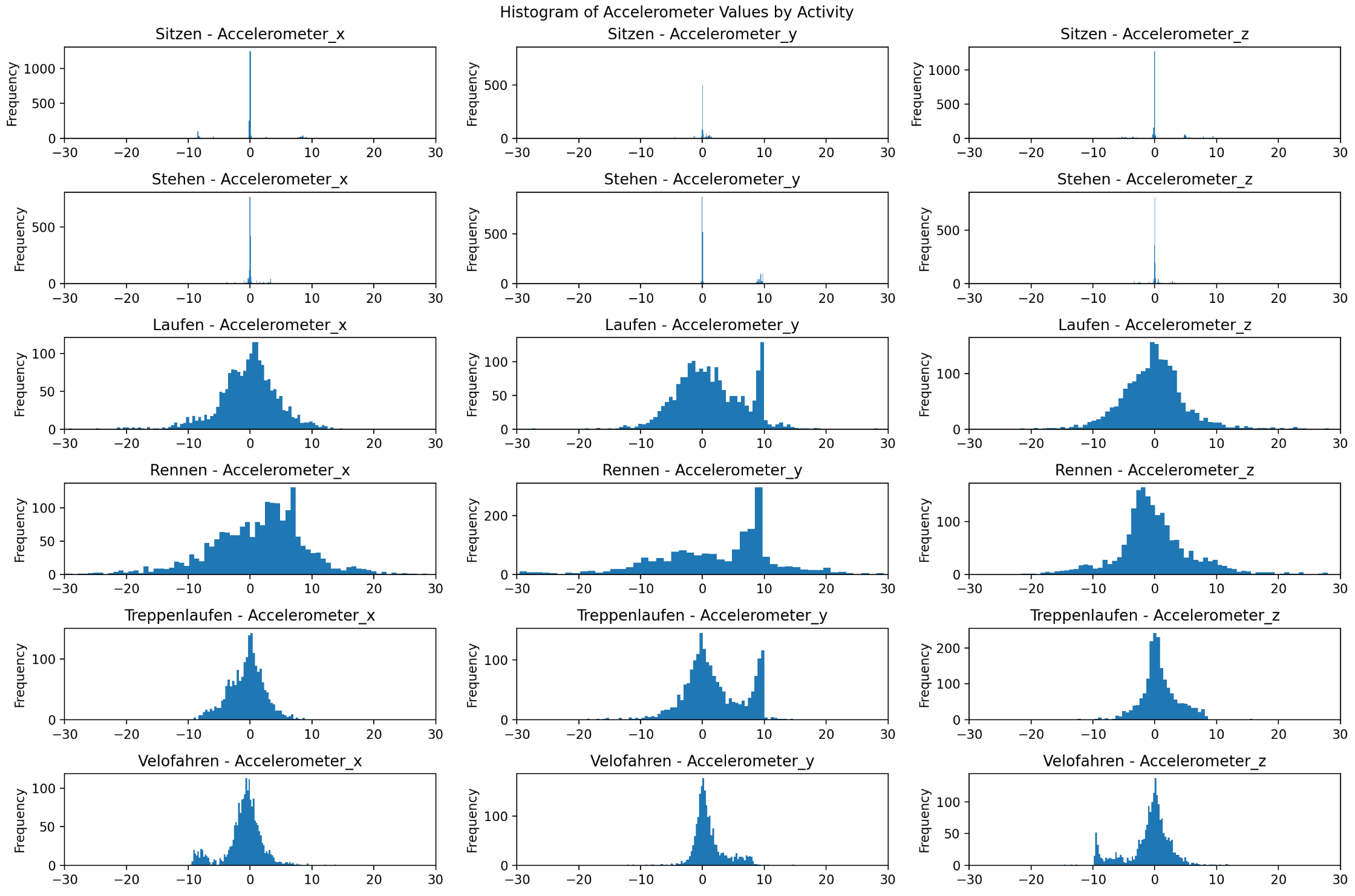
Bei den verschiedenen Aktivitäten sind deutliche Unterschiede in der Verteilung und Intensität der Messungen zu erkennen.
Ja, weil in der EDA klare Unterschiede der Sensormessungen bei den Aktivitäten zu erkennen waren. Wir gehen davon aus, dass dieser Sensor eine wichtige Grundlage für die Klassifizierung der Aktiviäten bilden wird. Auch in anderen Studien ist dieser Sensor oft sehr zentral.
Software Sensor berechnet die auf die verschiedenen Achsen wirkende Schwerkraft.
L2 norm ergibt fast immer 9.81 m/s^2 und schwankt um ca +- 2E-5 m/s^2. Periodische Muster zu erkennen. Bei einzelnen Personen sind verglichen zu anderen Personen viele Nan's vorhanden (bis 0.35% pro Aktivität).
Könnte theoretisch nützlich sein, da die FFT's der einzelnen Aktivitäten qualitativ unterschiedlich sind.
Nein, weil dieser Sensor nicht physisch vorhanden ist. Möglicherweise kann das Resultat dieses Sensors aus dem Accelerometer rekonstruiert werden.
Der Sensor misst die Rotation um die einzelnen Achsen.
Periodische Muster sind zu erkennen. Bei einzelnen Personen sind verglichen zu anderen Personen viele Nan's vorhanden (bis 0.35% pro Aktivität).
Periodische Muster sind via FFT qualitativ gut zu unterscheiden. Auch ein erster Test mittels (Rohdaten x Achse -> resampling -> Segmentierung -> FFT transformation -> PCA -> HistGradientBoostingClassifier) zeigt, dass eine Klassifikation durchgeführt werden kann.
Ja, weil dieser Sensor mit grosser Wahrscheindlichkeit physisch vorhanden ist und dieser in der Lage ist, periodische Signale messen zu können.
Er misst die Richtung des magnetischen Nordens aus sicht des Smartphones im Microteslas.
Es sind periodische Muster zu erkennen. Es wird die x-, y- und z-Ausrichtung angegeben.
So semi, weil zwar periodische Muster zu erkennen sind. Aber darüber ist auch noch die Ausrichtung des Gerätes versteckt, was man zuerst richtig bereinigen muss.
Ja, weil wir periodische Muster erkennen können.
Er misst den athmosphärischen Druck in Hekto-Pascal und berechnet dadurch die relative Höhe.
Sehr starke Schwankungen. Der Moving Average muss eine Minute betragen, um das Rauschen loszuwerden.
Nicht sehr nützlich, weil es ein sehr grosses Rauschen hat und die Windows gross sein müssen um etwas zu erkennen.
Nein, weil es viel Rauschen in den Daten hat und die Höhenveränderung unserer Meinung nach keine guten Rückschlüsse auf die Aktivität zulassen.
Dieser Sensor misst die Koordinaten des Endgeräts.
Die Spalten LocationGps_latitude und LocationGps_longitute enthalten Koordinaten in der Decimal Degrees Notation. Jedoch sind nur wenige Daten vorhanden (Ingesamt nur 2018 Datensätze).
Da wir nur Daten für Tobias erhalten haben, nützen uns diese Daten nicht.
Nein, da fast alle OBservationen keinen Wert beinhalten.
Er misst die Orientation in die x, y und z Achse.
Leider haben wir nur NA Werte.
Garnicht, da wir keine Daten haben.
Nein, da wir keine Daten haben.