RFC Dynamic Idle #2655
RFC Dynamic Idle #2655
Conversation
locales/en/messages.json
Outdated
| "message": "Jitter Reduction" | ||
| }, | ||
| "pidTuningFeedforwardJitterHelp": { | ||
| "message": "With this parameter, the Feedforward term can be reduced near the center of the sticks, which results in smoother end of flips and rolls.<br>The value represents a point of stick deflection: 0 - stick centered, 1 - full deflection. When the stick is above that point, Feedforward is kept constant at its configured value. When the stick is positioned below that point, Feedforward is reduced proportionally, reaching 0 at the stick center position.<br>Value of 1 gives maximum smoothing effect, while value of 0 keeps the Feedforward fixed at its configured value over the whole stick range." |
There was a problem hiding this comment.
This message applies for Transition; jitter reduction is very different and needs a different message. Maybe:
"Jitter reduction reduces Feedforward when the sticks move slowly. This allows smooth, jitter-free flight when making smooth slow arcs, yet provides full feedforward without any delay when the sticks are moved quickly. A higher threshold value (10-12) is more useful for cinematic or HD freestyle purposes, and a slightly lower value (5) better for racing or higher speed RC links."
There was a problem hiding this comment.
Updated. And removed. Decided to put it in a separate PR.
fde01eb to
b3989bd
Compare
b2c32c2 to
2e4dbc0
Compare
2e4dbc0 to
319bd85
Compare
|
Kudos, SonarCloud Quality Gate passed!
|








|
@haslinghuis in my opinion if we are thinking on finally release 4.3, this PR should go in to 10.9.0. |
|
Think we have time for this as 4.3 is not finished (need a firmware PR list), but agree with code freeze / going into release candidate state / finishing up. |
|
Getting a Release Candidate for Xmas would be amazing! Bring on the feature freeze! |
 asizon
left a comment
asizon
left a comment
There was a problem hiding this comment.
I think this hide disable style doesnt go with our other disabled styles arround tabs, but aproved.
|
AUTOMERGE: (PASS)
|
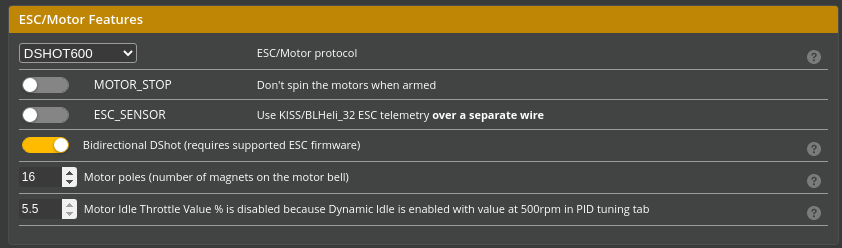
PR implementing betaflight/betaflight#11043
This PR also makes sure the user only can use (dynamic) idle using the right setup.
PID Tuning tab:

Motors tab: