Sensor de distancia SHARP
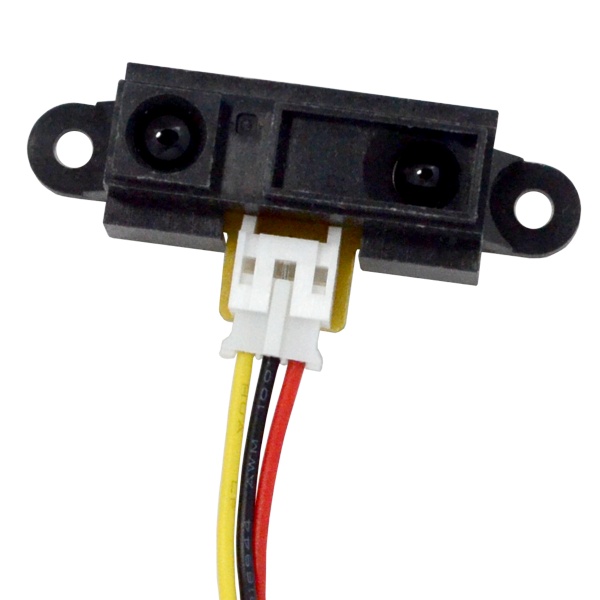
Este sensor óptico tiene un rango de 10-80cm (aunque modelos similares tienen otros rangos).
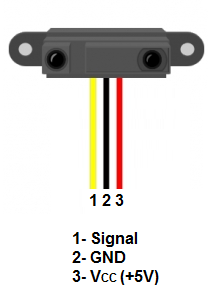
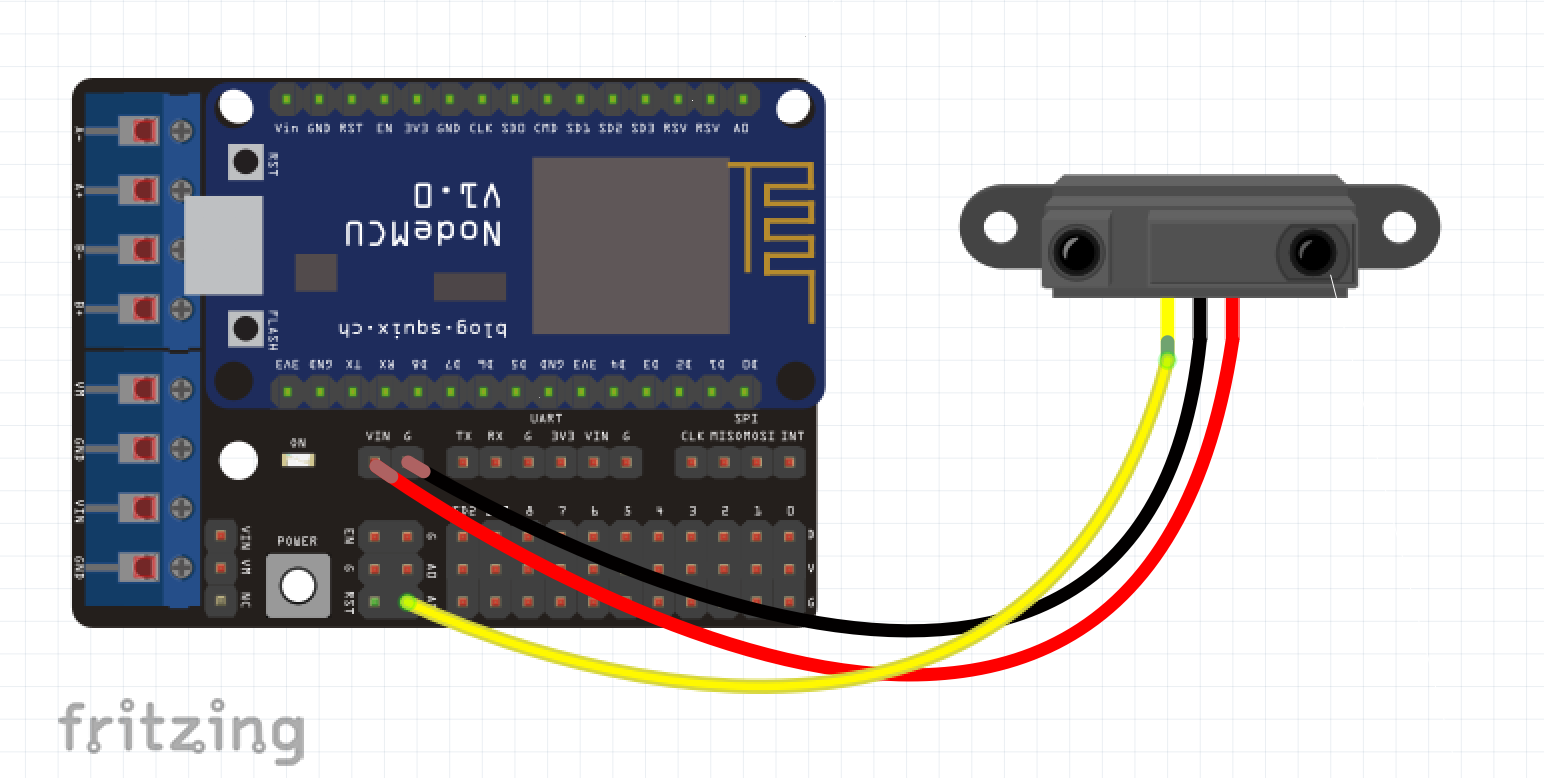
Es importante saber que SHARP devuelve la distancia en valores analógicos, por tanto es importante que el pin de datos esté conectado a un pin analógico. En el caso de NodeMCU sólo existe un pin analógico: A0.
/*
* getDistance
*
* Example of using SharpIR library to calculate the distance beetween the sensor and an obstacle
*
* Created by Giuseppe Masino, 15 June 2016
*
* -----------------------------------------------------------------------------------
*
* Things that you need:
* - Arduino
* - A Sharp IR Sensor
*
*
* The circuit:
* - Arduino 5V -> Sensor's pin 1 (Vcc)
* - Arduino GND -> Sensor's pin 2 (GND)
* - Arduino pin A0 -> Sensor's pin 3 (Output)
*
*
* See the Sharp sensor datasheet for the pin reference, the pin configuration is the same for all models.
* There is the datasheet for the model GP2Y0A41SK0F:
*
* http://www.robotstore.it/open2b/var/product-files/78.pdf
*
*/
//import the library in the sketch
#include <SharpIR.h>
//MODELS
//GP2YA41SK0F
//GP2Y0A21YK0F
//GP2Y0A02YK0F
//Create a new instance of the library
//Call the sensor "sensor"
//The model of the sensor is "GP2Y0A21YK0F"
//The sensor output pin is attached to the pin A0
SharpIR sensor( SharpIR::GP2Y0A21YK0F, A0 );
void setup()
{
Serial.begin( 9600 ); //Enable the serial comunication
}
void loop()
{
int distance = sensor.getDistance(); //Calculate the distance in centimeters and store the value in a variable
Serial.println( distance ); //Print the value to the serial monitor
}
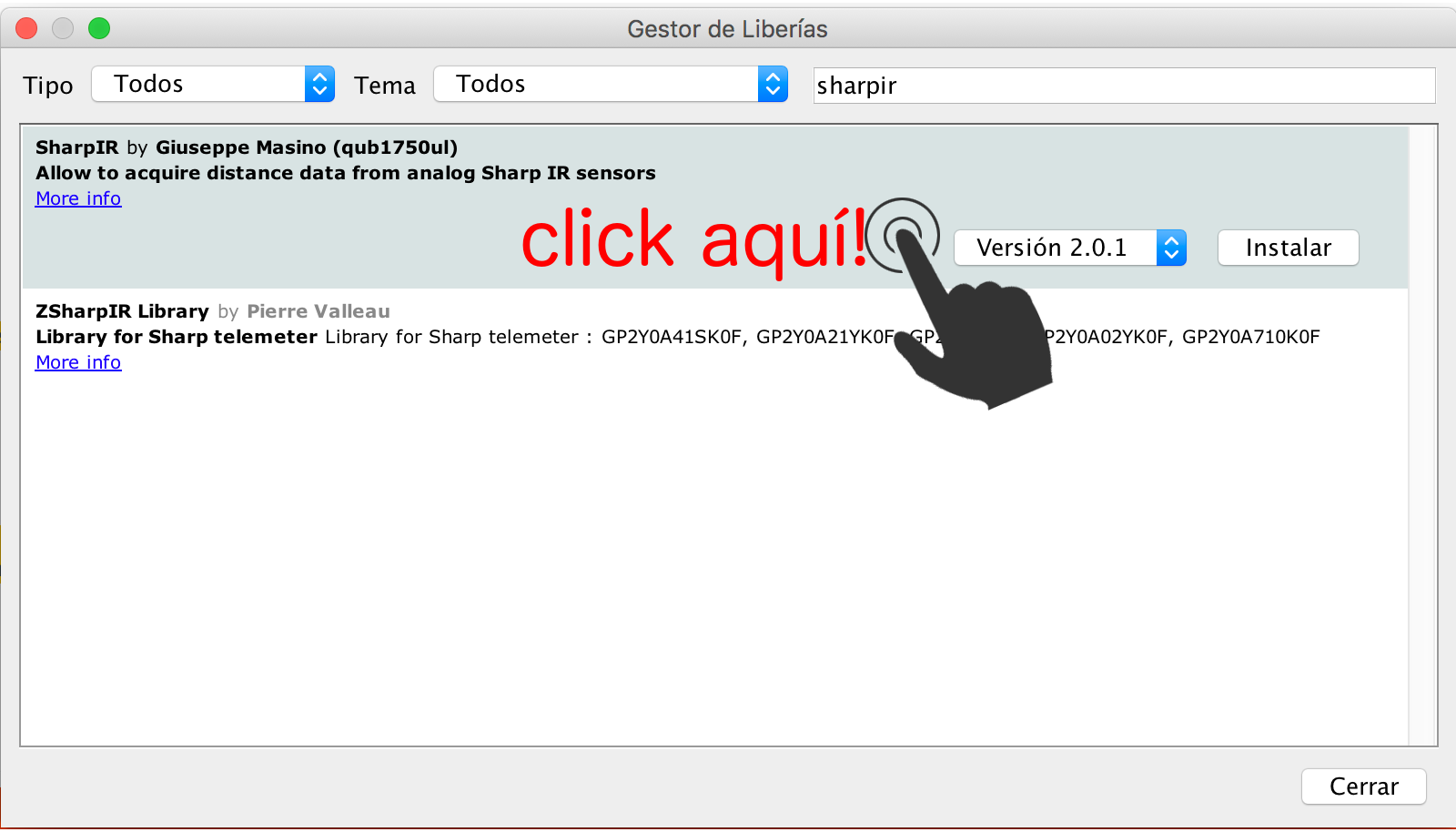
Este sensor requiere de la instalación de la siguiente librería:
- SharpIR