This repository contains all the ROS pkgs that I am developing during learning ROS by following TU Delft MOOC course Hello(Real) World with ROS-Robot Operating System. This course is also available at edx.org for certification.
- Week1: ROS Essentials
- Introduction to ROS Nodes,Topics, Services and Actions.
- Week2: Build your own robot environment
- Software representation of URDF
- ROS parameter server
- Real world object representations to the simulation environment
- Week3: Autonomous Navigation
- Map creation with GMapping package
- Autonomously navigate a known map with ROS navigation
- Week4: Manipulation
- Motion planning
- Pick and place behavious using industrial robotis with ROS Moveit
- Week5: Robot Vision
- Object Detetcion
- Pose estimation
- Week6: Final Project
- Build a production line application with two industrial robot arms and a mobile robot
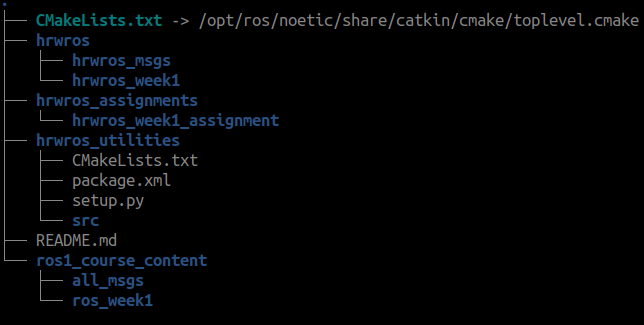
hrwrosis the top level folder that contains ros pkgs inside ithrwros_assignmentsis the another top level folder that contains ros pkgs for weekly based assignmentshrwros_utilitiesis the ros pkgs for useful functionsros1_course_contentcontains all ros pkgs that I developed during following this course. Basic purpose is to implement all the stuff taught in the course, to get better understanding of code and learning debugging.
If ROS-Noetic is not installed follow this
If ROS-Noetic Version already installed in the system : Run the following commands in the linux terminal to setup the ros workspace with turtlebot3 packages.
$ cd ~/catkin_ws/src # will only run if catkin_ws is available at root directory
$ git [email protected]:kumar-sanjeeev/ros-noetic-DelftX.git
$ cd ~/catkin_ws && catkin_make # to build ros packages