Inequality constraints under footstep rotations #9
Replies: 4 comments
-
|
Hi Saeed. It is better to open a separate issue for each question. Let me answer your first question here.
Note that one operation in your notes is incorrect: you cannot multiply by a homogeneous transform (or any matrix) in vector inequalities. To do this properly in general we use the double description method. To learn about this and the more general topic of polyhedral geometry you can start from this page and references therein.
To avoid any confusion here: the ZMP constraint has the form This implementation takes foot rotations into account. Here is an example where HRP-4 walks through curved footstep plans in Choreonoid: choreonoid_curved_walk.mp4.zip |
Beta Was this translation helpful? Give feedback.
-
|
I added these two plans |
Beta Was this translation helpful? Give feedback.
-
|
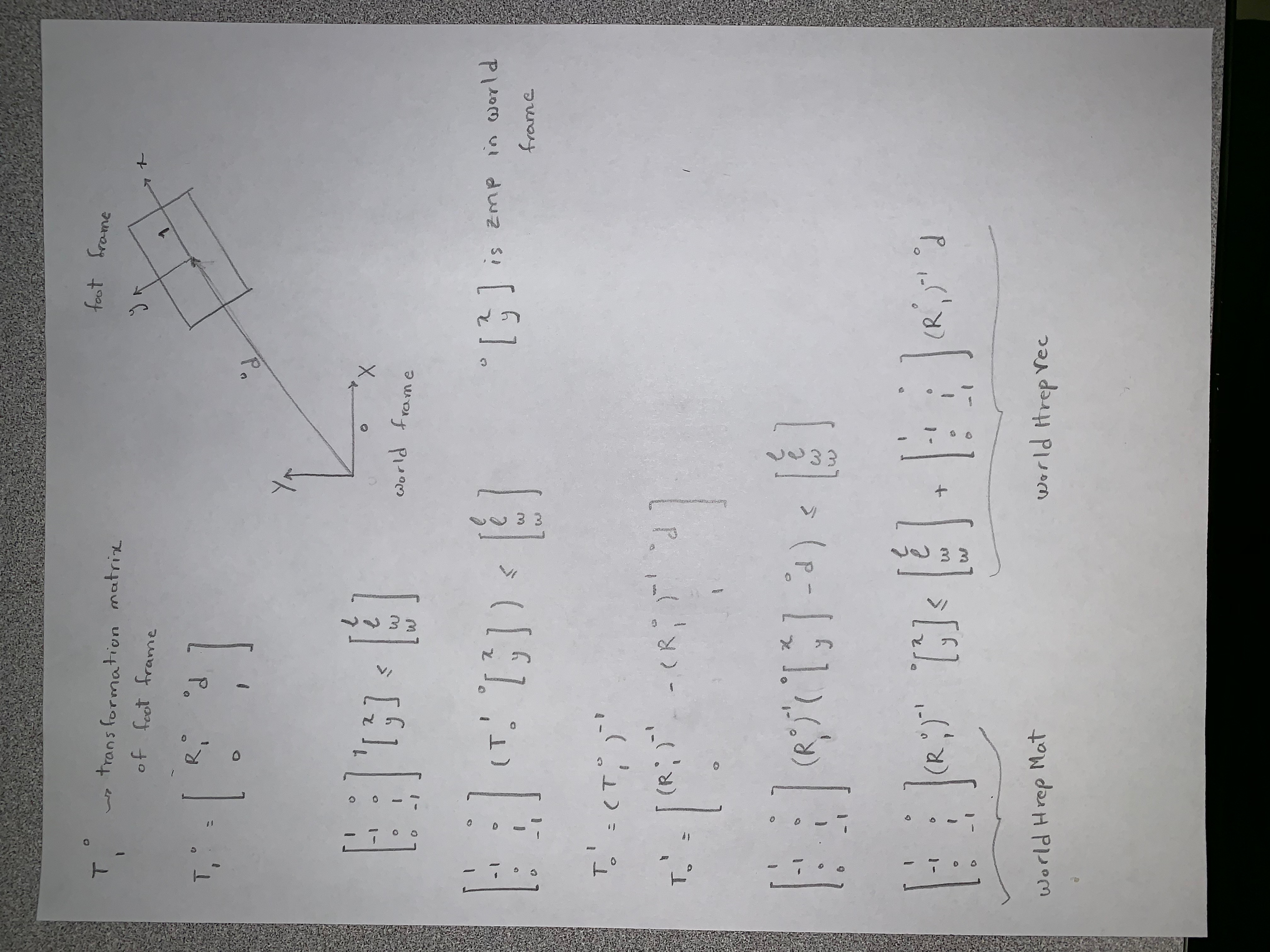
Thank you for your helpful response. I tried to find how the world coordinates are converted to local ones. However, I find a little difference in the formulation. Instead of the rotation matrix, I have seen the inverse of one (see figure). I have been a little bit confused. Is
|
Beta Was this translation helpful? Give feedback.
-
|
Good point:
Here, the important fact for you is that:
|
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
Dear Dr. Caron,
I have studied all of the codes in Pymanoid and LIPM admittance control packages as well as the relevant papers during the last few months. I have encountered two problems for which I appreciate your answers:
in LIPM:
and
}
in Pymanoid:
and
Beta Was this translation helpful? Give feedback.
All reactions