Spot Command References
This single Wiki page collects all different things you could do with Spot. Lots come from spot/docs. The hope is you can just look here instead of looking inside the docs.
This command (1) starts the record map command line interface from Spot SDK examples, (2) saves the map to a conventional location: rbd_spot_perception/maps/bosdyn, and (3) asks if you'd like to visualize the map. To run it:
rosrun rbd_spot_perception /graphnav_mapper.sh <map_name>
The launch file below:
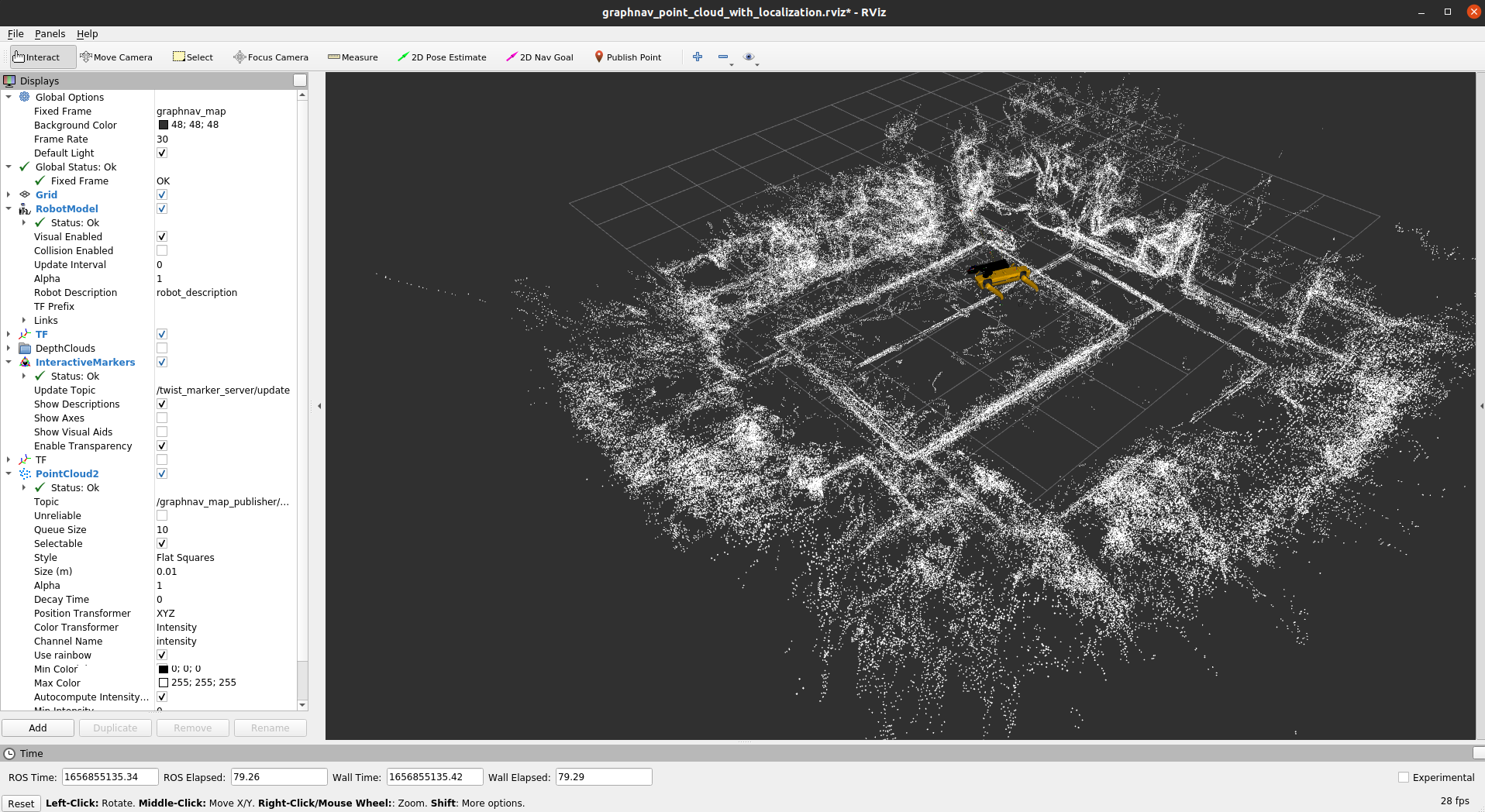
- publishes the map as point cloud;
- publishes waypoints;
- publishes robot state as TF transforms with URDF;
- starts a graphnav pose streamer for body localization.
roslaunch rbd_spot_perception graphnav_map_publisher_with_localization.launch map_name:=<map_name>
For visualization, run:
roslaunch rbd_spot_perception view_graphnav_point_cloud_with_localization.launch
Example output: