This is the fourth project in a series of projects within the Udacity Robotics Software Engineer Nanodegree program. In this project, real-time apprearance based mapping (RTAB-Map) is used to localize a robot and map its surroundings in a Gazebo world.
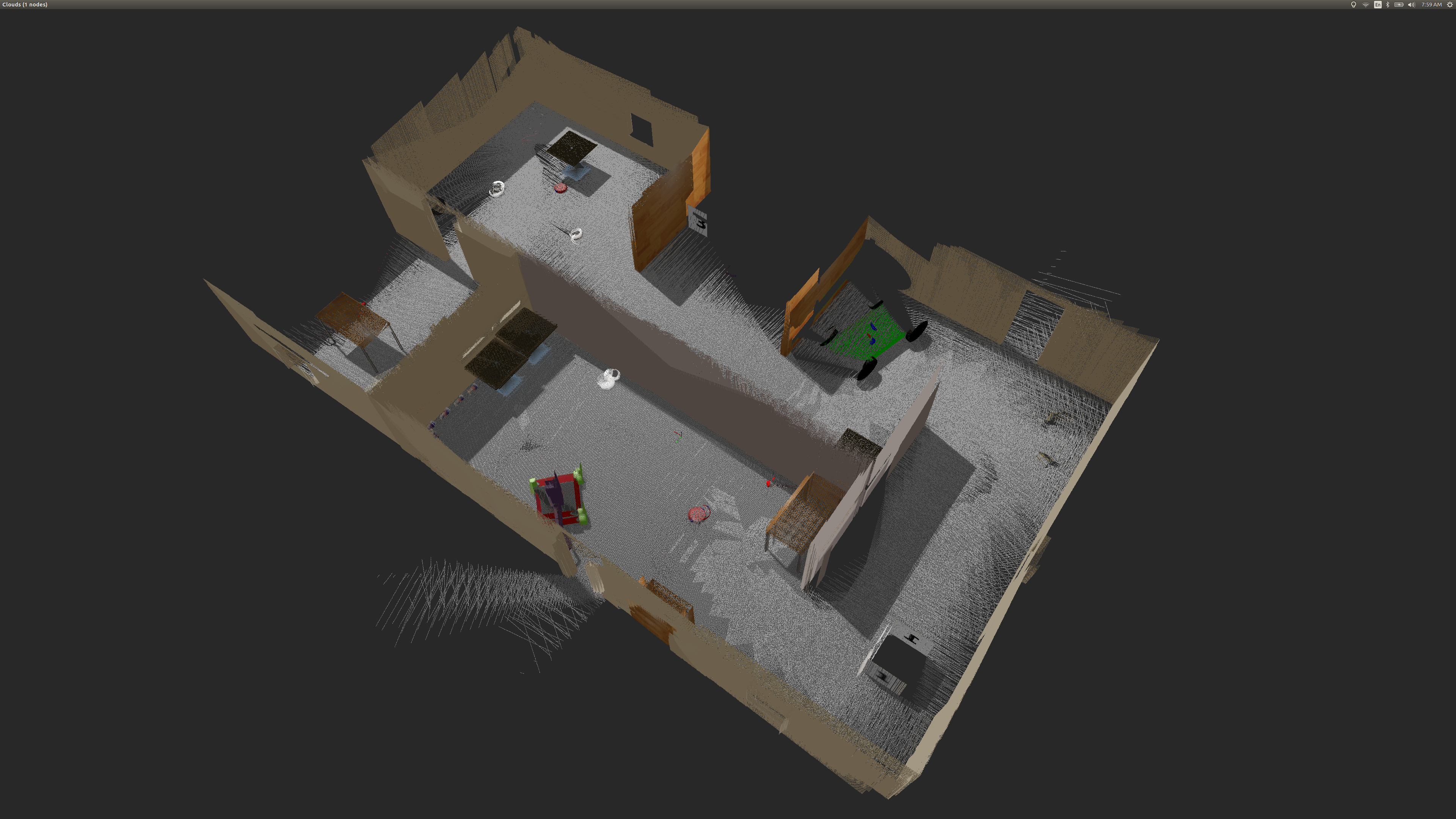
Gazebo world:

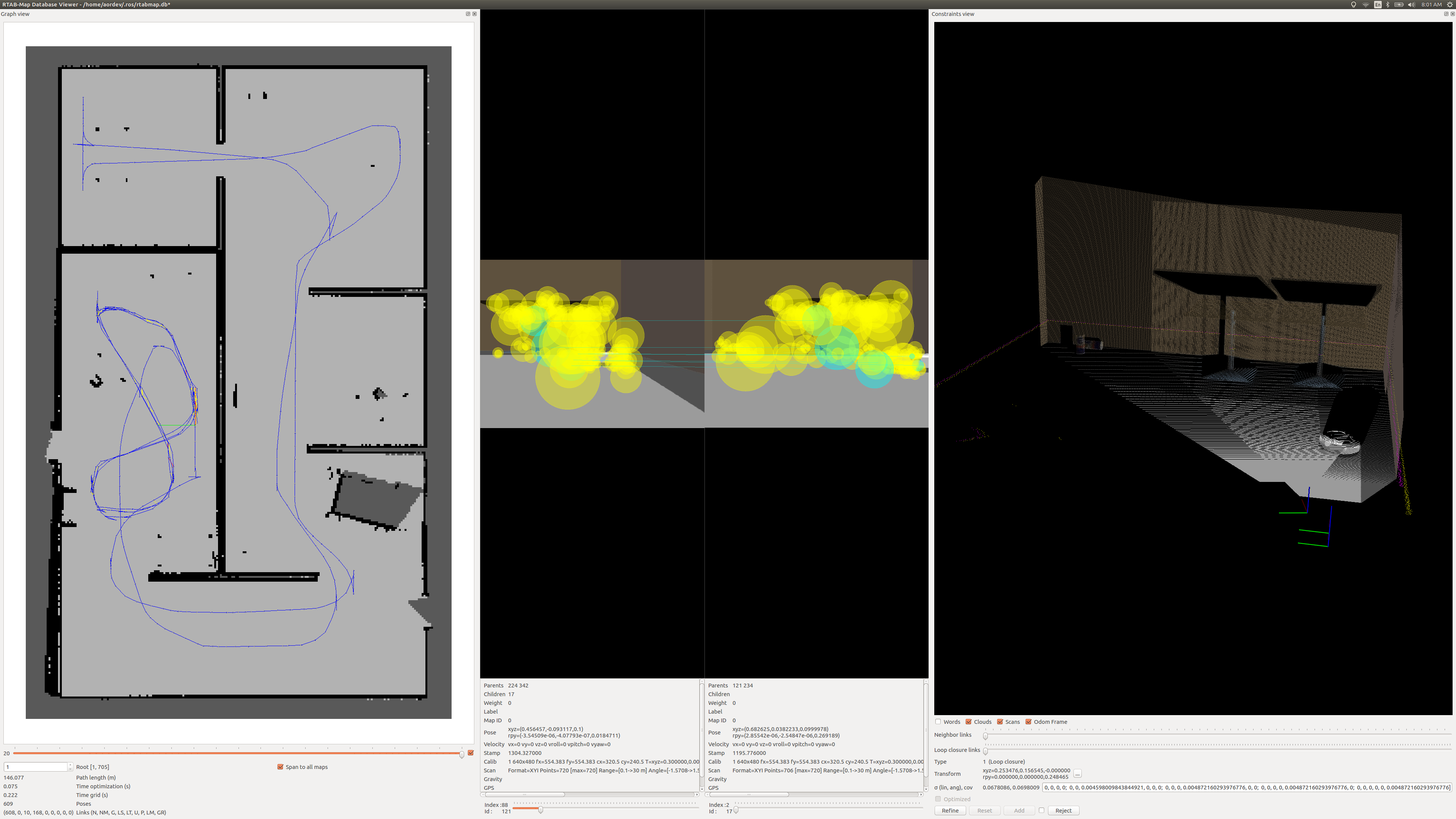
RTAB-Map database viewer that shows the constraint view and graph view with 10 global loop closures:
3-D map: